Промышленная сеть реального времени CAN представляет собой сеть с общей средой передачи данных. Это означает, что все узлы сети одновременно принимают сигналы передаваемые по шине. Невозможно послать сообщение какому-либо конкретному узлу. Все узлы сети принимают весь трафик передаваемый по шине. Однако, CAN-контроллеры предоставляют аппаратную возможность фильтрации CAN-сообщений.
Каждый узел состоит из двух составляющих. Это собственно CAN контроллер, который обеспечивает взаимодействие с сетью и реализует протокол, и микропроцессор (CPU).
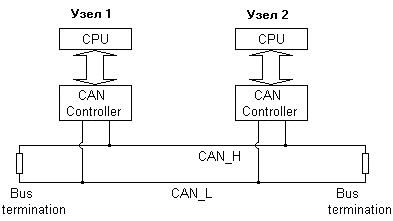
Рис. 1. Топология сети CAN.
CAN контроллеры соединяются с помощью дифференциальной шины, которая имеет две линии — CAN_H (can-high) и CAN_L (can-low), по которым передаются сигналы. Логический ноль регистрируется, когда на линии CAN_H сигнал выше, чем на линии CAN_L. Логическая единица — в случае когда сигналы CAN_H и CAN_L одинаковы (отличаются менее чем на 0.5 В). Использование такой дифференциальной схемы передачи делает возможным работу CAN сети в очень сложных внешних условиях. Логический ноль — называется доминантным битом, а логическая единица — рецессивным. Эти названия отражают приоритет логической единицы и нуля на шине CAN. При одновременной передаче в шину лог. нуля и единицы, на шине будет зарегестрирован только логический ноль (доминантный сигнал), а логическая единица будет подавлена (рецессивный сигнал).
- Типы сообщений сети CAN.
- Контроль доступа к среде передачи (побитовый арбитраж).
- Методы обнаружения ошибок.
- Механизм ограничения ошибок (Error confinement).
- Адресация и протоколы высокого уровня
- Физичекий уровень протокола CAN
- CAN-интерфейс
- Принцип работы
- Идентификаторы
- Физическая шина
- Высокая надёжность
- Сетевая гибкость и лёгкость расширения
- Арбитраж CAN-шины
- Обнаружение Ошибок
- Циклический контроль по избыточности (CRC)
- Текущий контроль логического уровня битов
- Контроль передаваемого поля битов
- Контроль заполнения битов
- Контроль сигнала «Подтверждение Приема»
- Флаг ошибки
- Формат CAN-сообщения
- Различия форматов
Типы сообщений сети CAN.
Данные в CAN передаются короткими сообщениями-кадрами стандартного формата. В CAN существуют четыре типа сообщений:
- Data Frame
- Remote Frame
- Error Frame
- Overload Frame
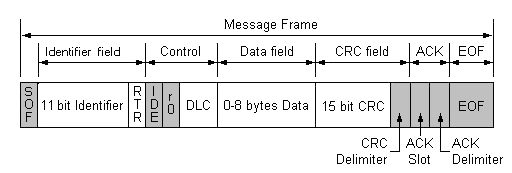
Data Frame — это наиболее часто используемый тип сообщения. Он состоит из следующих основных частей:
- поле арбитража (arbitration field) определяет приоритет сообщения в случае, когда два или более узлов одновременно пытаются передать данные в сеть. Поле арбитража состоит в свою очередь из:
- для стандарта CAN-2.0A, 11-битного идентификатора + 1 бит RTR (retransmit)
- для стандарта CAN-2.0B, 29-битного идентификатора + 1 бит RTR (retransmit)
Следует отметить, что поле идентификатора, несмотря на свое название никак не идентифицирует само по себе ни узел в сети, ни содержимое поля данных. Для Data кадра бит RTR всегда выставлен в логический ноль (доминантный сигнал).

Рис. 2. Data frame стандарта CAN 2.0A.
Remote Frame — это Data Frame без поля данных и с выставленным битом RTR (1 — рецессивные бит). Основное предназначение Remote кадра — это инициация одним из узлов сети передачи в сеть данных другим узлом. Такая схема позволяет уменьшить суммарный трафик сети. Однако, на практике Remote Frame сейчас используется редко (например, в DeviceNet Remote Frame вовсе не используется).
Error Frame — это сообщение которое явно нарушает формат солобщения CAN. Передача такого сообщения приводит к тому, что все узлы сети регистрируют ошибку формата CAN-кадра, и в свою очередь автоматически передают в сеть Error Frame. Результатом этого процесса является автоматическая повторная передача данных в сеть передающим узлом. Error Frame состоит из поля Error Flag, которое состоит из 6 бит одинакового значения (и таким образом Error frame нарушает проверку Bit Stuffing, см. ниже), и поля Error Delimiter, состоящее из 8 рецессивных битов. Error Delimiter дает возможность другим узлам сети обнаружив Error Frame послать в сеть свой Error Flag.
Overload Frame — повторяет структуру и логику работы Error кадра, с той разницей, что он используется перегруженным узлом, который в данный момент не может обработать поступающее сообщение, и поэтому просит при помощи Overload-кадра о повторной передаче данных. В настоящее время Overload-кадр практически не используется.
Контроль доступа к среде передачи (побитовый арбитраж).
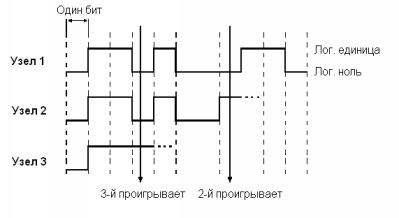
Поле арбитража CAN-кадра используется в CAN для разрешения коллизий доступа к шине методом не деструктивного арбитража. Суть метода не деструктивного арбитража заключается в следующем. В случае, когда несколько контроллеров начинают одновременную передачу CAN кадра в сеть, каждый из них сравнивает, бит, который собирается передать на шину с битом, который пытается передать на шину конкурирующий контроллер. Если значения этих битов равны, оба контроллера передают следующий бит. И так происходит до тех пор, пока значения передаваемых битов не окажутся различными. Теперь контроллер, который передавал логический ноль (более приоритетный сигнал) будет продолжать передачу, а другой (другие) контроллер прервёт свою передачу до того времени, пока шина вновь не освободится. Конечно, если шина в данный момент занята, то контроллер не начнет передачу до момента её освобождения.
Читайте также: Шины yokohama aspec что это
Рис. 3. Побитовый арбитраж на шине CAN.
Методы обнаружения ошибок.
CAN протокол определяет пять способов обнаружения ошибок в сети:
- Bit monitoring
- Bit stuffing
- Frame check
- ACKnowledgement Check
- CRC Check
Bit monitoring — каждый узел во время передачи битов в сеть сравнивает значение передаваемого им бита со значением бита которое появляется на шине. Если эти значения не совпадают, то узел генерирует ошибку Bit Error. Естественно, что во время арбитража на шине (передача поля арбитража в шину) этот механизм проверки ошибок отключается.
Bit stuffing — когда узел передает последовательно в шину 5 бит с одинаковым значением, то он добавляет шестой бит с противоположным значением. Принимающие узлы этот дополнительный бит удаляют. Если узел обнаруживает на шине больше 5 последовательных бит с одинаковым значением, то он генерирует ошибку Stuff Error.
Frame Check — некоторые части CAN-сообщения имеют одинаковое значение во всех типах сообщений. Т.е. протокол CAN точно определяет какие уровни напряжения и когда должны появляться на шине. Если формат сообщений нарушается, то узлы генерируют ошибку Form Error.
ACKnowledgement Check — каждый узел получив правильное сообщение по сети посылает в сеть доминантный (0) бит. Если же этого не происходит, то передающий узел регистрирует ошибку Acknowledgement Error.
CRC Check — каждое сообщение CAN содержит CRC сумму, и каждый принимающий узел подсчитывает значение CRC для каждого полученного сообщения. Если подсчитанное значение CRC суммы, не совпадает со значением CRC в теле сообщения, принимающий узел генерирует ошибку CRC Error.
Механизм ограничения ошибок (Error confinement).
Каждый узел сети CAN, во время работы пытается обнаружить одну из пяти возможных ошибок. Если ошибка обнаружена, узел передает в сеть Error Frame, разрушая тем самым весь текущий трафик сети (передачу и прием текущего сообщения). Все остальные узлы обнаруживают Error Frame и принимают соответствующие действия (сбрасывают принятое сообщение). Кроме того, каждый узел ведет два счетчика ошибок: Transmit Error Counter (счетчик ошибок передачи) и Receive Error Counter (счетчик ошибок приема). Эти счетчики увеличиваются или уменьшаются в соответствие с несколькими правилами. Сами правила управления счетчиками ошибок достаточно сложны, но сводятся к простому принципу, ошибка передачи приводит к увеличению Transmit Error счетчика на 8, ошибка приема увеличивает счетчик Receive Error на 1, любая корректная передача/прием сообщения уменшают соответствующий счетчик на 1. Эти правила приводят к тому, что счетчик ошибок передачи передающего узла увеличивается быстрее, чем счетчик ошибок приема принимающих узлов. Это правило соответствует предположению о большой вероятности того, что источником ошибок является передающий узел.
Каждый узел CAN сети может находится в одном из трех состояний. Когда узел стартует он находится в состоянии Error Active. Когда, значение хотя бы одного из двух счетчиков ошибок превышает предел 127, узел переходит в состояние Error Passive. Когда значение хотя бы одного из двух счетчиков превышает предел 255, узел переходит в состояние Bus Off.
Узел находящийся в состоянии Error Active в случае обнаружения ошибки на шине передает в сеть Active Error Flags. Active Error Flags сотстоит из 6 доминантных бит, поэтому все узлы его регистрируют. Узел в состоянии Passive Error передает в сеть Passive Error Flags при обнаружении ошибки в сети. Passive Error Flags состоит из 6 рецессивных бит, поэтому остальные узлы сети его не замечают, и Passive Error Flags лишь приводит к увеличению Error счетчика узла. Узел в состоянии Bus Off ничего не передает в сеть (не только Error кадры, но вообще никакие другие).
Адресация и протоколы высокого уровня
В CAN не существует явной адресации сообщений и узлов. Протокол CAN нигде не указывает что поле арбитража (Identification field + RTR) должно использоваться как идентификатор сообщения или узла. Таким образом, идентификаторы сообщений и адреса узлов могут находится в любом поле сообщения (в поле арбитража или в поле данных, или присутствовать и там, и там). Точно также протокол не запрещает использовать поле арбитража для передачи данных.
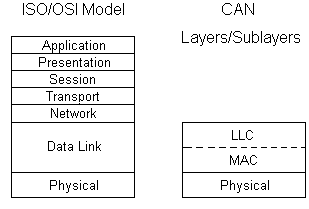
Утилизация поля арбитража и поля данных, и распределение адресов узлов, идентификаторов сообщений и приоритетов в сети является предметом рассмотрений так называемых протоколов высокого уровня (HLP — Higher Layer Protocols). Название HLP отражает тот факт, что протокол CAN описывает только два нижних уровня эталонной сетевой модели ISO/OSI, а остальные уровни описываются протоколами HLP.
Читайте также: Что означает корейская фамилия шин
Рис. 4. Логическая структура протокола CAN.
Существует множество таких высокоуровневых протоколов. Наиболее распространенные из них это:
Физичекий уровень протокола CAN
Физический уровень (Physical Layer) протокола CAN определяет сопротивление кабеля, уровень электрических сигналов в сети и т.п. Существует несколько физических уровней протокола CAN (ISO 11898, ISO 11519, SAE J2411).
В подавляющем большинстве случаев используется физический уровень CAN определенный в стандарте ISO 11898. ISO 11898 в качестве среды передачи определяет двухпроводную дифференциальную линию с импедансом (терминаторы) 120 Ом (допускается колебание импеданса в пределах от 108 Ом до 132 Ом. Физический уровень CAN реализован в специальных чипах — CAN приемо-передатчиках (transceivers), которые преобразуют обычные TTL уровни сигналов используемых CAN-контроллерами в уровни сигналов на шине CAN. Наиболее распространенный CAN приемо-передатчик — Phillips 82C250, который полностью соответствует стандарту ISO 11898.
Махимальная скорость сети CAN в соответствие с протоколом равна 1 Mbit/sec. При скорости в 1 Mbit/sec максимальная длина кабеля равна примерно 40 метрам. Ограничение на длину кабеля связано с конечной скоростью света и механизмом побитового арбитража (во время арбитража все узлы сети должны получать текущий бит передачи одновременно, те сигнал должен успеть распространится по всему кабелю за единичный отсчет времени в сети. Соотношение между скоростью передачи и максимальной длиной кабеля приведено в таблице:
скорость передачи максимальная длина сети 1000 Кбит/сек 40 метров 500 Кбит/сек 100 метров 250 Кбит/сек 200 метров 125 Кбит/сек 500 метров 10 Кбит/сек 6 километров Разъемы для сети CAN до сих пор НЕ СТАНДАРТИЗОВАНЫ. Каждый протокол высокого уровня обычно определяет свой тип разъемов для CAN-сети.
CAN-интерфейс
Сетевой интерфейс CAN (Controller Area Network) был разработан в 1987г. (версия 1.0) фирмами BOSCH и INTEL для создания бортовых мультипроцессорных систем реального времени. Последняя спецификация интерфейса 2.0, разработанная фирмой BOSCH в 1992г., является дополнением предыдущей версии. В международной организации по стандартизации зарегистрирован ISO 11898 (для высокоскоростных приложений) и ISO 11519-2 (для низкоскоростных приложений).
Принцип работы
CAN является высокоинтегрированным сетевым интерфейсом передачи данных со скоростью до 1 Мбит/сек. Устройства в CAN-системе соединяются по шине, состоящей из 3-х проводов (2 сигнальных и один общий) (см. рис.).
Сообщения данных, передаваемые из любого узла по CAN-шине, могут содержать от 1 до 8 байт. Каждое сообщение помечено идентификатором, который в сети является уникальным (например: «Нагрев до 240», «Отказ нагрева»,»Бункер загружен», и т.д.). При передаче другие узлы сети получают сообщение и каждый из них проверяет идентификатор. Если сообщение имеет отношение к данному узлу, то оно обрабатывается, в противном случае – игнорируется. CAN-контроллер каждого из устройств может обрабатывать одновременно несколько идентификаторов (например, контроллеры SIEMENS и INTEL могут обрабатывать до 15). Таким образом, в каждом из устройств можно легко организовать несколько «виртуальных» каналов обмена информацией с различными устройствами, включая каналы одновременного получения сообщений.
Рис. 1. Соединение устройств по CAN-шине
Идентификаторы
Идентификатор определяет тип и приоритет сообщения. Более низкому числовому значению идентификатора соответствует более высокое значение приоритета. Сообщение, имеющее более высокий приоритет, передается раньше сообщения, имеющего более низкий приоритет. После сообщения с высоким приоритетом передается сообщение с более низким приоритетом, если во время передачи не появится сообщение с более высоким приоритетом, затем передается сообщение с еще более низким приоритетом и т. д.
Физическая шина
Представляет собой витую пару (экранированную или неэкранированную) и общий провод. Плоская пара (телефонный тип кабеля) также работает хорошо, но более чувствительна к внешним источникам шума.
Высокая надёжность
Для обеспечения безотказной работы в тяжёлых условиях по стандарту ISO11898 CAN-контроллер обеспечивает работу в сети в следующих случаях:
- любой из 3-х проводов в шине оборван,
любой провод — закорочен на питание,
любой провод — закорочен на общий провод.
При обрыве 2-х проводов часть функций основной системы может быть реализована в каждой из подсистем, созданных обрывом.
Сетевая гибкость и лёгкость расширения
Принятая в CAN-сети схема передачи сообщений обеспечивает большие возможности при создании, расширении и модернизации систем.
Новые устройства, предназначенные для приёма данных, могут добавляться к сети без изменения уже существующих программных средств, если их подключение не приводит к превышению нагрузочной способности и максимальной длины шины. При этом новые сетевые устройства способны обмениваться информацией между собой, не нарушая работоспособность старой системы, если в протоколе обмена были использованы новые идентификаторы.
Читайте также: Автомобильные шины в дзержинске нижегородской области
В CAN-сети имеется возможность одновременной передачи сообщений сразу нескольким устройствам. Эта особенность позволяет передавать по ней синхросигналы.
Арбитраж CAN-шины
В любой системе некоторые из параметров изменяются быстрее, чем другие. Например, скорость ротора двигателя, как правило, изменяется за меньший промежуток времени, чем температура его корпуса или положение заслонки. Быстро изменяющиеся параметры должны передаваться более часто и, следовательно, требуют более высокого приоритета. Во время работы также возможно появление аварийных сообщений, которые должны передаваться с наивысшим приоритетом (например, превышение допустимой температуры, обрыв управляющего соленоида, короткое замыкание в цепи и т.д.).
Узлы CAN-сети являются равноправными при обмене, и каждый из них в любой момент времени может иметь сообщение, требующее безотлагательной передачи. Вероятность одновременного требования передачи от различных устройств не является чем-то необычайным, а случается регулярно. Для разрешения подобного конфликта требуется быстродействующий механизм распределения очередности передачи сообщений. Для этого в CAN-системе используется Неразрушающий Поразрядный Арбитраж.
Приоритет CAN-сообщения определяется двоичным значением его идентификатора.
Числовое значение каждого идентификатора сообщения назначается в начальной фазе проектирования системы. Идентификатор с самым низким числовым значением идентификатора имеет самый высокий приоритет. Передача логического нуля по CAN-шине осуществляется токовой посылкой, а состояние логической единицы определяется по отсутствию тока. В процессе передачи каждый из источников сообщений, который имеет необходимость в передаче, начинает передавать свой идентификатор, одновременно проверяя его на линии. Если в процессе передачи обнаруживается несовпадение (т.е. «лишний» ноль), то передатчик, обнаруживший это несоответствие, прекращает передачу своего идентификатора и переключается на прием. Конфликта на шине при этом нет, так как значение бита с уровнем логической единицы фактически не передается, и в результате сообщение с наивысшим приоритетом проходит по шине так, как будто оно единственное. В следующем цикле шины будет передано сообщение с более низким приоритетом, и т.д. Таким образом достигается максимальная пропускная способность шины и минимальная задержка для «горячих» сообщений.
Рис. 2. Соединение устройств по CAN-шине
Обнаружение Ошибок
CAN содержит 5-ступенчатый механизм обнаружения ошибок:
- циклический контроль по избыточности (CRC),
контроль передаваемого поля битов,
контроль сигнала «Подтверждение Приема»,
текущий контроль логического уровня битов,
контроль заполнения битов.
Циклический контроль по избыточности (CRC)
Каждое переданное сообщение содержит контрольный код (CRC), вычисленный передатчиком на основе содержания передаваемого сообщения. Приёмные узлы выполняют аналогичную операцию, помечают обнаруженные ошибки и устанавливают соответствующие флаги.
Текущий контроль логического уровня битов
Любой передатчик автоматически контролирует и сравнивает фактический логический уровень битов на шине с уровнем, который он передает. Если уровни не совпадают, помечается ошибка логического уровня битов.
(Примечание: этот механизм также используется при арбитраже шины для определения приоритета сообщения, однако ошибка в этом случае, естественно, не возникает).
Контроль передаваемого поля битов
В составе CAN-сообщения передаются предопределенные битовые комбинации, которые контролируются при приёме. Если приемник обнаруживает недопустимый бит в одной из этих комбинаций, то устанавливается флаг ошибки формата.
Контроль заполнения битов
CAN использует методику добавления заполняющего бита для дополнительного контроля передаваемых сообщений. После передачи пяти последовательных битов с одинаковым уровнем передатчик автоматически вводит в разрядный поток бит противоположного значения. Приемники сообщения автоматически удаляют такие биты перед обработкой сообщения. Если обнаруживается шестой бит одинаковой полярности, то помечается ошибка заполнения битов.
Контроль сигнала «Подтверждение Приема»
Каждое переданное сообщение подтверждается приемником, и если этого не произошло, тогда устанавливается флаг ошибки подтверждения приема.
Флаг ошибки
В случае если обнаружена ошибка, то узел, обнаруживший ошибку, прерывает передачу посылкой флага ошибки. При этом передатчик автоматически реинициализирует передачу сообщения, что предотвращает все узлы от возникновения ошибок и гарантирует непротиворечивость данных в сети.
С учетом действия всех механизмов контроля, реальное значение возникновения необнаруженной ошибки в CAN-системе – 10 -11 .
Формат CAN-сообщения
Стандартный CAN-протокол (версия 2.0A) поддерживает формат сообщения с 11-разрядными идентификаторами (Стандартное сообщение).
Расширенный CAN-протокол (версия 2.0B) поддерживает 11-битовый и 29-битовый форматы идентификаторов (Расширенное сообщение).
Большинство контроллеров версии 2.0A передают и принимают только сообщения стандартного формата, хотя часть из них могут только получать сообщения расширенного формата.
Контроллеры версии 2.0B могут посылать и получать сообщения в обоих форматах.
Различия форматов
В версии 2.0B поле битов идентификатора состоит из двух частей.
Первая часть (основная часть идентификатора) имеет длину одиннадцать битов для совместимости с версией 2.0A, вторая часть — восемнадцать битов (расширение идентификатора), что дает общую длину идентификатора в двадцать девять бит.
Для различения форматов используются биты Identifier Extension (IDE) и Substitute Remote Request (SRR) в Поле Арбитража.
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле