
Последовательный интерфейс (serial) предназначен передачи данных через универсальный асинхронный порт UART. Порт UART очень часто используется для передачи данных с Ардуино на компьютер, и обратно, а также для связи нескольких плат ардуин между собой.
Для многопортовых DUE/MEGA см. здесь.
- Основные функций для работы с последовательным портом (Serial)
- Разные варианты функции print:
- Функция write:
- Пример 1. Передача данных по Serial-порту с Arduino на компьютер
- Пример 2. Передача данных по Serial-порту с компьютера на Arduino
- Возможные проблемы
- Как соединить две ардуины по UART (serial) порту
- Схема соединения двух ардуин:
- Работа Arduino MEGA/DUE с несколькими последовательными serial портами
- Многопортовые ардуино.
- Пример вывода на дисплей LCD1602 через последовательный порт UART Arduino из-под Linux средствами языка Python
- Обмен данными между двумя Arduino при помощи программного UART
- Как это работает
- Разбор кода
- Использование выводов
- Урок 26.1 Соединяем две arduino по шине UART
- Преимущества:
- Недостатки:
- Нам понадобится:
- Видео:
- Схема подключения:
- Код программы:
- Настройка параметров шины UART:
- 🔥 Видео
Видео:Урок 26.1 Соединяем две arduino по шине UARTСкачать

Основные функций для работы с последовательным портом (Serial)
Serial.begin(rate) — Открывает последовательный порт и задаёт скорость для последовательной передачи данных. Типичная скорость обмена для компьютерной коммуникации — 9600.
Очевидно, когда задействован последовательный порт, выводы 0 (RX) и 1 (TX) не могут использоваться для других целей.
Serial.println(data) — Передаёт данные в последовательный порт, сопровождая автоматическим возвратом каретки и переходом на новую строку.
Serial.print(data) — тоже самое без возврата каретки и перехода на новую строку.
Serial.begin(скорость_передачи); — Инициализация порта. Задает скорость передачи в битах в секунду. Нормированные скорости: 300, 1200, 2400, 4800, 9600, 14400, 19200, 38400, 57600, или 115200.
count = Serial.available(); — Принимаемые по последовательному порту байты попадают в буфер микроконтроллера, откуда Ваша программа может их считать. Функция возвращает количество накопленных в буфере байт. Последовательный буфер может хранить до 128 байт.
char = Serial.read(); — Считывает следующий байт из буфера последовательного порта. возвращает -1 если нет входящих данных
Serial.flush(); — Ожидает окончания передачи исходящих данных (до версии Arduino 1.0 функция очищала буфер последовательного соединения)..
Разные варианты функции print:
Serial.print(b, DEC); — выводит ASCII-строку — десятичное представление числа b.
Serial.print(b, BYTE) — выводит младший байт числа b.
Serial.print(str) // если str — строка или массив символов, побайтно передает str на COM-порт.
Serial.println(); — отличие заключается в том, что после данных дополнительно выводятся два символа – символ возврата каретки (ASCII 13, или ‘\r’) и символ новой линии (ASCII 10, или ‘\n’).
Функция write:
Serial.write(uint8_t c); — Записывает данные в последовательный порт. Данные посылаются как байт или последовательность байт.
Serial.write(val); // где val — переменная для передачи, как единственный байт
Serial.write(str); // где str — строка для передачи, как последовательность байт
Serial.write(buf, len); // где buf — массив для передачи, как последовательность байт; len — длина массива.
Видео:Урок 26.3 Соединяем две arduino по шине I2C #iarduinoСкачать

Пример 1. Передача данных по Serial-порту с Arduino на компьютер
Инициализация порта со скоростью 9600 бот и передача данных (от Arduino на внешние устройства, например на компьютер):
Видео:Уроки Arduino. Общение по Serial, парсинг данных, протоколы связиСкачать

Пример 2. Передача данных по Serial-порту с компьютера на Arduino
serialEvent() — функция вызывается автоматически, когда поступают данные.
Serial.setTimeout() — задает максимальное время (в мс) для работы Serial.readBytesUntil();
Видео:Общение между Ардуино и Ардуино [ простая передача данных ] [ проекты Ардуино ] #ДомаВместеСкачать
![Общение между Ардуино и Ардуино [ простая передача данных ] [ проекты Ардуино ] #ДомаВместе](https://i.ytimg.com/vi/oAgTzS0_e7w/0.jpg)
Возможные проблемы
1) auto-reboot DTR : возможна автоперезагрузка МК при передаче на него данных по serial-пору. Чтобы отключить это, надо поставить конденсатор 10мкФ между RES и GND. Я ставил электролитический кондер (естественно, + на RES).
Видео:FLprog урок №2 шины данных Uart\I2C\ICSP\OneWireСкачать

Как соединить две ардуины по UART (serial) порту
Схема соединения двух ардуин:
Длина провода и скорость: RS-232 (англ. Recommended Standard 232) — стандарт физического уровня для асинхронного интерфейса (UART).
Расстояние связи по RS232 максимум 15 метров.
Но всё зависит от скорости.
Видео:Arduino. УРОК 7. UART. Передача данныхСкачать

Работа Arduino MEGA/DUE с несколькими последовательными serial портами
Многопортовые ардуино.
Как вы уже заметили, на ардуиновских платах Mega и Due имеется по 4 последовательных порта, а именно:
Читайте также: Размер шин ниссан куб az10
Serial — выводы 0 (RX) and 1 (TX);
Serial1 — выводы 19 (RX) and 18 (TX);
Serial2 — выводы 17 (RX) and 16 (TX);
Serial3 — выводы 15 (RX) and 14 (TX).
Естественно, что на Due используется напряжение 3.3 В (на MEGA как обычно 5 В).
Здесь синим цветом выделены собственно имена объектов ( Serial , Serial1 , Serial2 , Serial3 ), которые используются в коде программы для работы с их методами. Всё просто! Например,
Видео:Теория и практика UART, I2C (TWI), SPI на arduino.Скачать

Пример вывода на дисплей LCD1602 через последовательный порт UART Arduino из-под Linux средствами языка Python
Короче говоря, есть комп с линуксом, к которому подключена Arduino через USB, а к арудине подключен дисплей LCD1602, и мы хотим на него выводить инфу.
Сначала привожу полный код программы для Arduino UNO, к которой подключен дисплей LCD1602:
Я сделал здесь решетку ‘#’ в качестве символа завершения передачи пакета данных. Как только в потоке данных встречается символ #, данные выводятся на дисплей, и буфер обнуляется, при этом сам символ ‘#’ не выводится. Конечно, можно было бы использовать ‘\n’ или др.
Далее мы напишем скрипт на Python, который будет выводить инфу на дисплей. Я выбрал Python, потому что это прикладной язык и он лучше всего подходит для подобных задач. С такими языками как C++/C# и т.п. больше возни с библиотеками, а здесь всё просто, особенно если это дело происходит под линуксом.
Первым делом устанавливаем необходимые библиотеки (для 2-ой или 3-ей версии python)
$sudo apt-get install python-serial
$sudo apt-get install python3-serial
Далее в интерпретаторе python пишем:
Здесь ардуина у меня подключена к порту /dev/ttyUSB0 — это я узнавал из Arduino IDE. Обычно она всегда на этом порту сидит, если других устройств на последовательный порт не подключено.
Как вы уже догадались, и в первой, и во второй программы должна быть указано одинаковая скорость в бодах. В моем случае это 9600 — стандартная, хотя и маленькая скрость. Может быть и больше (читай выше).
Видео:Соединяем две arduino через порт UARTСкачать

Обмен данными между двумя Arduino при помощи программного UART
Коммуникация по последовательному порту , по умному называемая как универсальный асинхронный прием / передача (UART), как правило, используется для программирования и отладки Arduino через порт USB. Существуют разные датчики и приборы, которые используют UART как метод основной связи, и иногда нам нужно объединять два и больше Arduino между собой для обмена информацией.
Тем не менее, у большинства Arduino имеется только один последовательный порт, который используется при связи по USB. Но как же связать такой контроллер с другим? Конечно использование Arduino типа Mega или подобного решает эту задачу, ведь у него до четырех последовательных портов, но если нужна связь с простыми платами из линейки Ардуино, тут нужно искать другой выход. Существует особая программная библиотека, которая имитирует UART порт на других цифровых контактах. У нее имеются несколько недостатков, но в общем она работает.
Так что нам понадобится для демонстрации подобной коммуникации:
Выполните следующие шаги, для подключения двух Arduino UNO, с помощью программного последовательного порта:
Читайте также: Технологическая карта по монтажу шин
1. Например, воспользуемся выводами 8 и 9 для RX и TX на обоих Arduino, соедините контакт 8 на одном Arduino с контактом 9 на другом, и контакт 9 на первом Arduino подключить с контактом 8 на втором.
2. Соедините общий провод GND обеих Arduino вместе.
3. Подключите один Arduino к USB компьютера, и соедините вывод 5В этого контроллера с таким же выводом другого или подайте на второй отдельное питание.
Вот реализация с использованием выводов 8 и 9 для RX и TX:


Следующий код разделен на две части. Arduino мастер будет получать команды от компьютера и передавать их по программному последовательному порту. Вот первая часть кода:
// Подключаем библиотеку Software Serial
// Объявляем задействованные дискретные каналы контроллера для связи
SoftwareSerial softSerial(8, 9); // RX, TX>
Serial.begin(9600); // Обычная скорость передачи данных
softSerial.begin(9600); // инициализация программного последовательного порта
// Проверяем получение команд от компьютера
// Отправляем полученную команду компьютера на программный UART
А вот и код подчиненного (слейва), который интерпретирует символы, отправленные от мастера. Если пришол символ «а», он включит встроенный светодиод. Если получен символ «х», то светодиод будет потушен:
// Подключение библиотеки Software Serial
// Назначение задействованных дискретных каналов
SoftwareSerial softSerial(8, 9); // RX, TX
// Дискретный канал, на котором висит встроенный светодиод
softSerial.begin(9600); // Инициализация программного последовательного порта
pinMode(LED, OUTPUT); // Определение светодиодного вывода как выход
// Проверяем, есть ли что-нибудь в буфере программного последовательного порта
// Читаем один символ из буфера программного последовательного порта и сохраняем его переменную com
// Действуем соответственно полученному символу
Видео:💡 Arduino - Взаимодействие с компьютером. TTL и UART - EP8Скачать

Как это работает
Программный последовательный порт имитирует стандартный последовательный порт на различных цифровых выводах Arduino. Это довольно удобно в целом, но нужно понимать, что это программная имитация, не поддержанная аппаратно. Это означает, что при этом тратятся общие ресурсы контроллера, в частности время выполнения цикла программы и памяти. А вообще, оно работает просто как обычный последовательный порт. Все функции, присутствующие в нормальном последовательном порте также присутствуют и в программном.
Видео:Подключение нескольких устройств, датчиков по I2C (АйТуСи) шинеСкачать

Разбор кода
Для начала взглянем на программу мастера, который получает команды по обычному последовательному порту с компьютера и отправляет подчиненному контроллеру. В начале кода мы подключаем библиотеку SoftwareSerial.h
Дальше нам нужно объявить объект нашей библиотеки. Это делается соответственно следующему синтаксису:
SoftwareSerial softSerial(8, 9); // RX, TX
При этом будет вызвана параллельная связь, в данном случае программная. Она будет использовать вывод 8 для чтения (RX) и вывод 9 для передачи (TX). Далее подробнее остановимся на том, какие именно выводы следует выбирать.
Используя объявленный объект библиотеки, мы можем использовать все функции, характерные для обычного аппаратного параллельного порта, такие как softSerial.read(), softSerial.write() и так далее. В следующей части кода мы проверяем пришло ли что-нибудь с аппаратного порта. И если что-то пришло, мы считываем это и отправляем в программный порт:
В коде подчиненного контроллера использована самая простая реализация управления светодиодом командами через последовательный порт с одной только разницей, что тут используются команды с программного порта. Меняется только синтаксис и вместо привычных функций Serial.read(), Serial.available() и так далее нужно писать softSerial.read() и softSerial.available().
Читайте также: Фиат дукато 2014 размер шин
Программный UART имеет некоторые важные ограничения и недостатки. Вот некоторые из них.
Видео:Уроки Arduino #2 - работа с монитором COM портаСкачать

Использование выводов
Мы не можем использовать любые дискретные выводы плат Arduino для организации программного порта. Для Tx, вообще-то можем использовать любые, но для Rx можно использовать только те, которые поддерживают внешние прерывания. У плат Arduino Leonardo и Micro могут быть использованы только выводы 8, 9, 10, 11, 14, 15 и 16, в то время как у Mega или Mega 2560 могут быть использованы только выводы 10, 11, 12, 13, 50, 51, 52, 53, 62, 63, 64, 65, 66, 67, 68 и 69.
Видео:Введение в шину I2CСкачать

Урок 26.1 Соединяем две arduino по шине UART
При создании некоторых проектов, требуется разделить выполняемые задачи между несколькими Arduino.
В этом уроке мы научимся соединять две Arduino по аппаратной шине UART.
Преимущества:
Недостатки:
- Нет возможности «залить» скетч, при наличии устройств на аппаратной шине UART.
- Реализуется соединение только двух устройств (при отсутствии доп. модулей).
Нам понадобится:
- Arduino х 2шт.
- LCD дисплей LCD1602 IIC/I2C(синий) или LCD1602 IIC/I2C(зелёный) х 2шт.
- Trema Shield х 2шт.
- Эластичная клавиатура 4×4 х 2шт.
- Шлейф «мама-мама» (4 провода) для шины I2С х 2шт.
- Шлейф «мама-мама» (3 провода) для шины UART x 1шт.
Для реализации проекта нам необходимо установить библиотеки:
- Библиотека iarduino_KB (для подключения матричных клавиатур).
- Библиотека LiquidCrystal_I2C_V112 (для подключения дисплеев LCD1602 по шине I2C).
О том как устанавливать библиотеки, Вы можете ознакомиться на странице Wiki — Установка библиотек в Arduino IDE .
Видео:
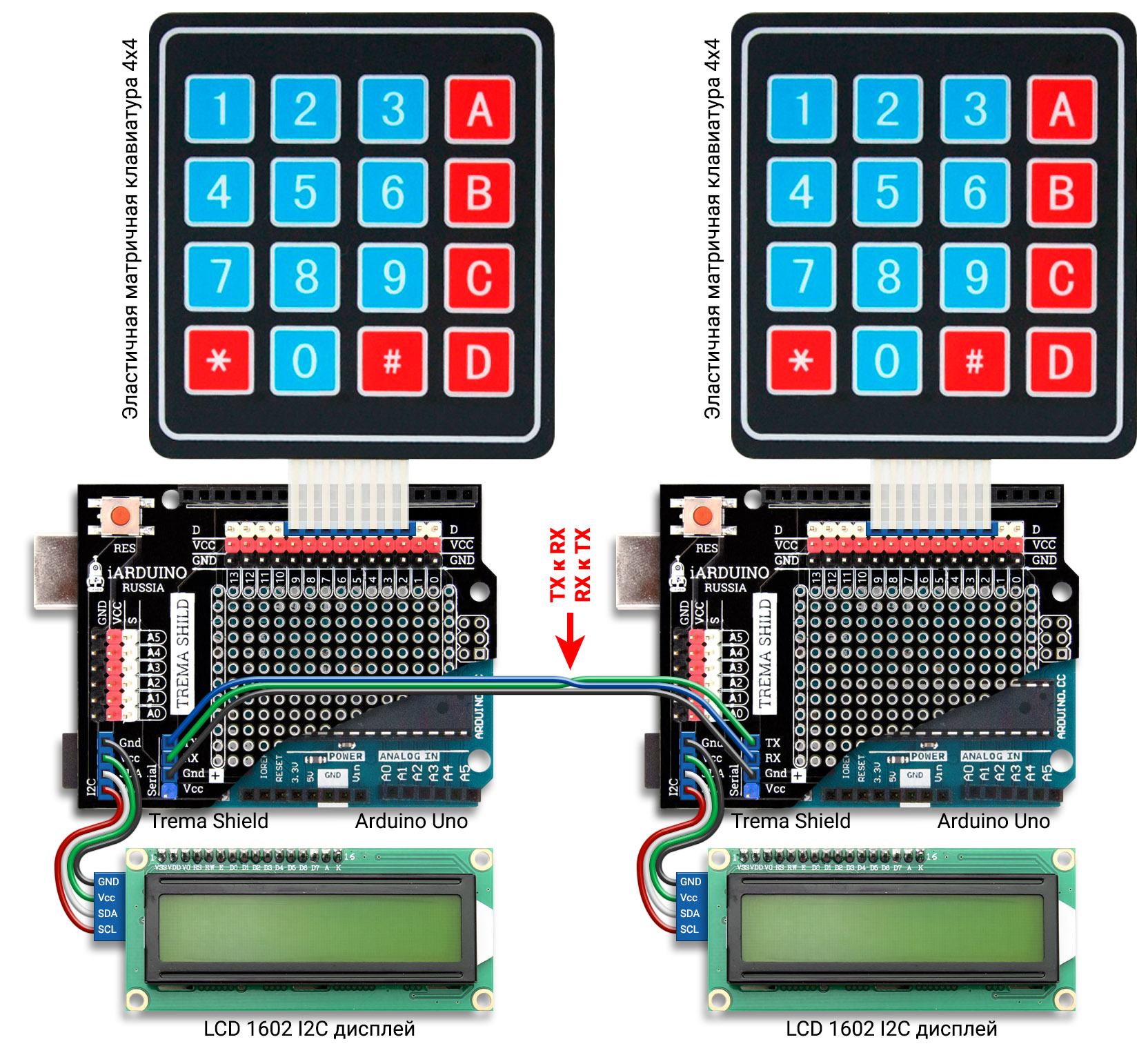
Схема подключения:
Подключение LCD дисплея осуществляется к аппаратным выводам шины I2C.
Клавиатура подключается к любым цифровым выводам, в примере используются выводы 2-9.
Соединение двух arduino осуществляется по шине UART:
| Arduino 1 | Arduino 2 |
|---|---|
| TX (transmit — передать) | RX (receive — получить) |
| RX (receive — получить) | TX (transmit — передать) |
| GND (ground — земля) | GND (ground — земля) |
Код программы:
Настройка параметров шины UART:
Максимальная, аппаратно реализуемая частота передачи данных, может достигать 1/8 от тактовой частоты.
Настройка шины осуществляется вызовом функции begin() класса Serial, с передачей ей до двух аргументов. Первый аргумент устанавливает частоту передачи данных (в примере 9600 бод), второй (необязательный) аргумент устанавливает количество битов, наличие проверки на четность/нечетность, длину стопового бита (по умолчанию SERIAL_8N1).
Допустимые значения второго аргумента функции begin() класса Serial:
- SERIAL_5N1
- SERIAL_6N1
- SERIAL_7N1
- SERIAL_8N1
- SERIAL_5N2
- SERIAL_6N2
- SERIAL_7N2
- SERIAL_8N2
- SERIAL_5E1
- SERIAL_6E1
- SERIAL_7E1
- SERIAL_8E1
- SERIAL_5E2
- SERIAL_6E2
- SERIAL_7E2
- SERIAL_8E2
- SERIAL_5O1
- SERIAL_6O1
- SERIAL_7O1
- SERIAL_8O1
- SERIAL_5O2
- SERIAL_6O2
- SERIAL_7O2
- SERIAL_8O2
Значения отличаются последними тремя символами, которые означают следующее:
- Первая цифра: указывает количество бит в минимальной посылке (от 5 до 8).
- Буква N/E/O: E-проверка четности, O-проверка нечетности, N-без проверки.
- Последняя цифра: указывает длину стопового бита (1 или 2 битовых интервала)
Таким образом значение по умолчанию SERIAL_8N1 означает, что в минимальной посылке 8 бит (без учёта стартового и стопового битов), данные передаются без проверки на чётность/нечётность, длина стопового бита равна 1 битовому интервалу.
Настройки шины UART обеих arduino должны быть идентичны!
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле
🔥 Видео
Урок 7. Fermi. UART - последовательный интерфейс передачи данных.Скачать

Урок 14 Блоки UART в программе FlprogСкачать
Программирование Arduino.UART.Скачать
Обмен данными между платами Arduino без написания кода в программе FlprogСкачать
MCP2515, контроллер CAN шины с интерфейсом SPIСкачать
Подключение Arduino при помощью UARTСкачать
Работа с UART. Часть 2 Прием сообщенийСкачать






