
Автомобили давно уже стали не просто компьютерами на колёсах, а скорее компьютерными сетями. Передача механических, гидравлических или пневматических усилий между узлами и механизмами со временем превратилась в обмен электрическими сигналами, а сейчас и в информационное взаимодействие.

Наряду с массовым внедрением дешёвых электронных комплектующих, потребовалось разработать достаточно сложное и надёжное сетевое физическое и программное обеспечение.
Видео:Кан шина, что это? Поймет школьник! принцип работыСкачать

Зачем нужна в машине CAN-шина
По мере усложнения автомобильной электроники, производители столкнулись с некоторыми проблемами, которые всё больше проявлялись с ростом рыночной конкурентоспособности новых моделей.
Далее наращивать объём оборудования простым добавлением управляющих и исполнительных устройств стало невозможно:
- количество проводов в жгутах, их масса, объёмы и расход дорогостоящей меди стали превышать разумные пределы;
- многие узлы, особенно датчики и первичные преобразователи, многократно дублировались, что необоснованно увеличивало затраты;
- сложнейшие автомобили, особенно премиального класса, стали совершенно неподъёмными в обслуживании и диагностике даже для профильных сервисов из-за отсутствия стандартизации технических решений;
- надёжность машин падала по мере роста количества заключённого в них оборудования, как по чисто объективным законам связи сложности и безотказности, так и из-за отсутствия времени на отработку многочисленных уникальных систем.
Решение должно было быть радикальным, и этот качественный скачок в развитии автомобильной электроники произошёл.
Электросхемы машин стали делать по принципам, заложенным в основах вычислительной техники и к тому времени уже достаточно устоявшимся и понятным.
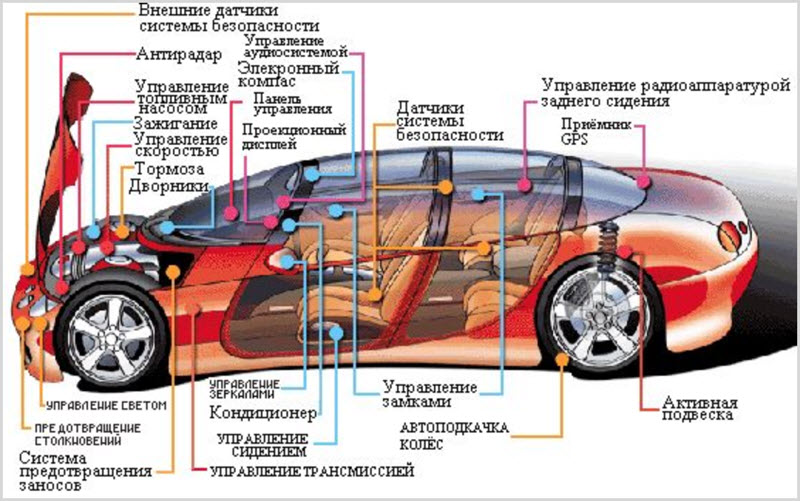
Автомобиль стал представлять собой сеть из микрокомпьютеров, каждый из которых обслуживал свою систему или отдельный узел.
Например, двигатель, коробку передач, узлы трансмиссии, блок климата и даже отдельные фонари наружного освещения или стеклоподъёмники. Уже не надо было тянуть к каждому устройству медные провода в огромном количестве через весь автомобиль.
Причём до появления единой информационной шины некоторые узлы были обвешаны сразу несколькими однотипными датчиками, электронными блоками и жгутами проводки.
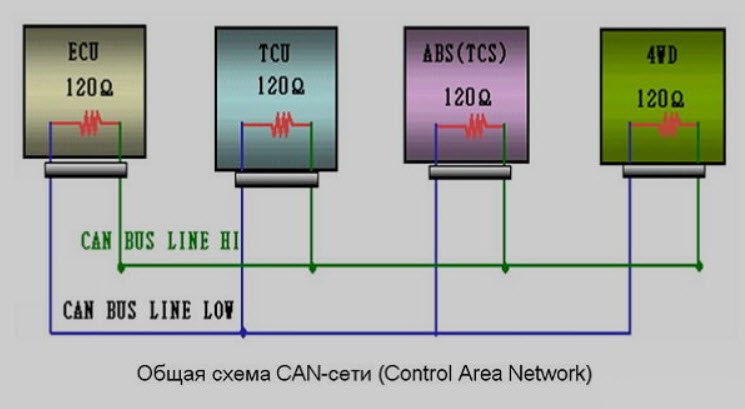
CAN-шина обходится единственной витой парой, то есть скрученными между собой двумя тонкими проводками, которые обходят все устройства, имея ответвления на каждое из них.
По схеме получается, что все блоки соединены параллельно через данную шину. Последовательный способ передачи информации делает это возможным, отдельных проводов данных, адресов, синхронизации и назначения приоритета не требуется.
Более того, системе не нужен единый обрабатывающий и управляющий сервер, все ресурсы распределены по микроконтроллерам.
Видео:Простая проверка CAN шины. Сканер не видит автомобиль через OBD2. Как правильно выбрать изоленту.Скачать

Схема и место расположения КАН-интерфейса
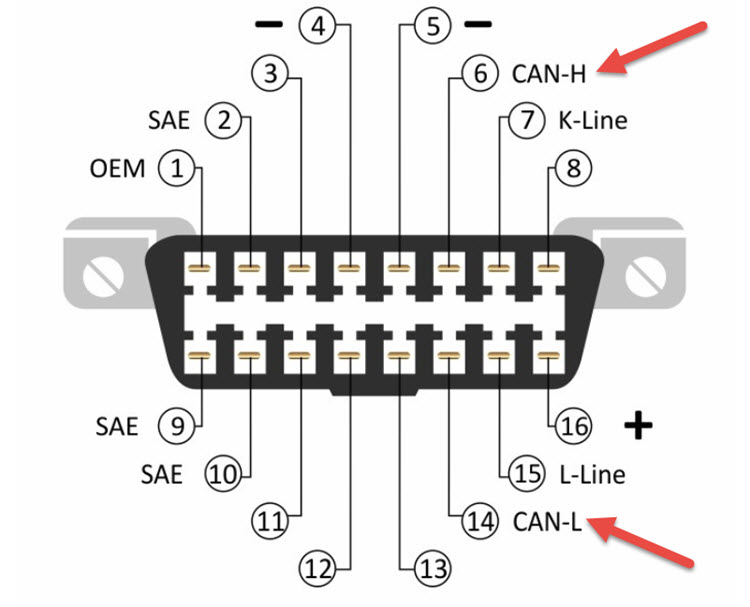
Сеть имеет выход наружу через диагностический OBD разъём, где на этот счёт стандартом чётко определена пара контактов.

Точнее, две пары, из дальнейшего рассмотрения станет понятно, что через диагностику можно подключаться к двум CAN-шинам различного вида и назначения.
Обеспечивающий совместную работу шлюз в разных автомобилях может быть выполнен в виде отдельного блока, входить в состав контроллера управления двигателем, но чаще – приборной панели.
Видео:CAN шина👏 Как это работаетСкачать

Принцип работы
Работа CAN-шины определяется физическим и логическим протоколами, которые достаточно чётко стандартизованы, хотя и имеют целый ряд исполнений.
Физически это витая пара, каждый из проводов которой является сигнальным. Работают они в противофазе, один поэтому называется CAN-High, второй – CAN-Low.
Сделано так с целью обеспечить максимальную помехоустойчивость при большой скорости передачи данных. Сигнал с пары снимается по дифференциальному принципу, то есть парой встречно включённых компараторов.
На концах витой пары имеется волновое согласование двумя терминальными резисторами по 120 Ом. Хотя встречаются и другие номиналы, но редко.
Активным уровнем считается низкий, он же логический ноль. Это общий принцип в работе устройств с открытым коллектором, разве что тут не применяется инвертирование уровней. Отсюда и логический принцип работы – инициируется линия любым устройством, открывшим свой выходной транзистор и сформировавшим первый нулевой бит.
Далее идёт идентификация приоритетного устройства, которое должно передать свою информацию первым в случае конфликта во времени. Протокол стандартный, каждый бит посылки расписан в даташитах ISO.
Все устройства одновременно передают и считывают информацию чётко соблюдая протокол, зашитый в памяти их контроллеров. Ненужные или ошибочные данные определяются и игнорируются.
Видео:поиск нерабочей can шины, часть дваСкачать

Виды CAN-шин
Обычно используют две шины – высокоскоростную и низкоскоростную (не желая использовать этот компрометирующий термин, некоторые производители говорят о среднескоростных устройствах).
Первая применена для связи наиболее важных устройств, агрегатов двигателя, трансмиссии, тормозов, подвесок, систем безопасности. Вторая обслуживает второстепенные функции комфорта и сервиса.
Это не значит, что системы автономны. Они связаны между собой через шлюз, обычно находящийся в приборной панели. Низкоскоростная линия также имеет свои контакты в диагностическом разъёме, записанные в стандарт.
Сделано так, чтобы системы низшего уровня важности не мешали максимально быстрому обмену приоритетных устройств. А большое быстродействие, например, регулировке сидений ни к чему.
На низшем уровне могут работать ещё более простые шины, однопроводные и низкоскоростные. Они подключаются к общей CAN через свой контроллер.
Например, в двери могут стоять стеклоподъёмники, блок кнопок управления, различные датчики, всё это нет необходимости выводить на общую шину. Но и плодить множество проводов тоже. Используются простейшие контроллеры и однопроводная сеть.
Читайте также: Шины для дрифта r15
Видео:Как работает LIN шина автомобиля. K-Line L-Line шины данных. Лин шина автомобиля. Lin-bus networkСкачать

Как подключиться и сделать диагностику автомобиля
Сканеры могут внедряться в протокол шины и анализировать её состояние, а также проходящую информацию. Можно использовать виртуальные устройства, эмулирующие отдельные блоки, а также создавать и передавать тестовые команды отдельным участникам сети.
Для связи используются специальные адаптеры USB-CAN, более сложные устройства и программное обеспечение.
До появления профессиональных CAN-анализаторов и тестеров пользовались скоростным запоминающим осциллографом и логическим анализатором.
Эти приборы тоже способны сохранять и предоставлять для изучения отдельные фреймы CAN, но в работе неудобны, требуют больших затрат времени.
Видео:Компьютерная диагностика авто. K-линия и CAN шинаСкачать

Неисправности
Отказы шины обычно сводятся к нескольким типовым случаям:
- пропадание питания отдельных устройств;
- повреждения проводки и разъёмов;
- отказ контроллеров.
Базой всей сетевой периферии является современная микроэлектроника и большие интегральные контроллеры серийного производства, поэтому надёжность оборудования в целом достаточно высока. Но поиски проблемного блока иногда бывают долгими из-за параллельного их подключения и размещения по всему автомобилю.
Видео:Для чего служит CAN-шина в сигнализацииСкачать

Плюсы и минусы встроенных шин
Сейчас уже трудно представить себе автомобиль с достойным набором современных опций без информационной шины, а конкурентоспособность требует ещё и высокого быстродействия.
CAN-шина всё это обеспечивает:
- имеется автоматический контроль проходящей информации на ошибки;
- дифференциальная передача сигналов и использование витой пары даёт хорошую скорость и защиту от помех;
- стандартизация протоколов упрощает диагностику и поиск неисправностей;
- построение системы приоритетов упрощает проектирование;
- все устройства функционально закончены и универсальны.
Но со временем усугубляются и недостатки. Так, усложнение автомобилей привело к тому, что быстродействия даже самых последних версий уже не хватает.
Поэтому в настоящее время эту самую распространённую автомобильную шину уже можно считать устаревшей, новые проекты обладают значительно более высоким быстродействием.
Видео:Экспресс диагностика CAN шины на автомобиле. №21Скачать

Can шина автомобиля распиновка
Диагностика и ремонт: CAN — шина
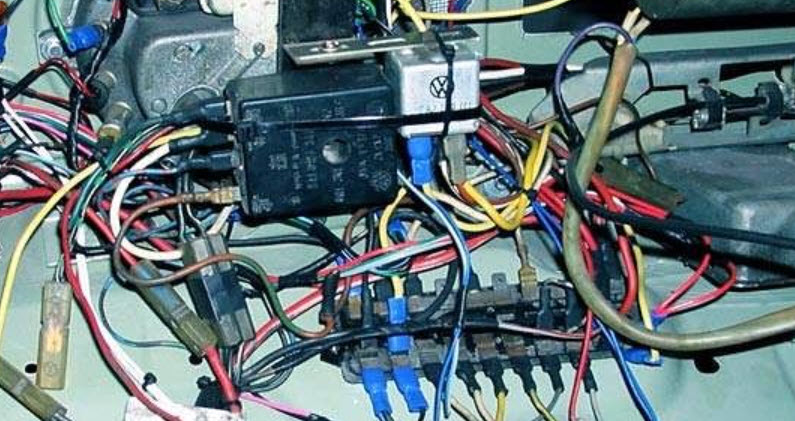
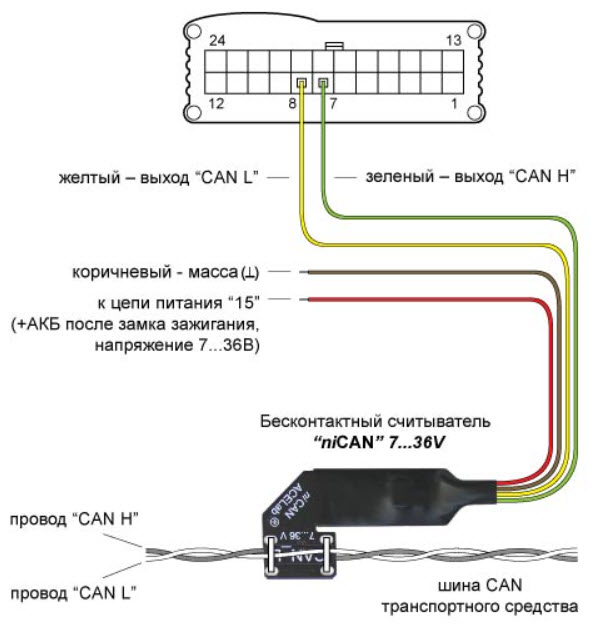
Именно так выглядит ( в основном) та самая «шина CAN «, с которой в последнее время нам придется сталкиваться все чаще и чаще:

Это обыкновенный двухпроводной кабель получивший название Twisted Pair.
На приведенном фото 1 показаны провода CAN High и CAN Low силового агрегата.
По этим проводам производится обмен данными между блоками управления, они могут нести информацию о скорости автомобиля, скорости вращения коленчатого вала, угле опережения зажигания и так далее.
Обратите внимание, что один из проводов дополнительно помечен черной полоской. Именно таким образом отмечается и визуально определяется провод CAN High (оранжево-черный).
Цвет провода CAN-Low — оранжево-коричневый.
За основной цвет шины CAN принят оранжевый цвет.
На рисунках и чертежах принято изображать цвета проводов шины CAN другими цветами, а именно:
CAN-High — желтым цветом
CAN-Low — зеленым цветом
Всего существует несколько разновидностей шин CAN , определяемых выполняемыми ими функциями:
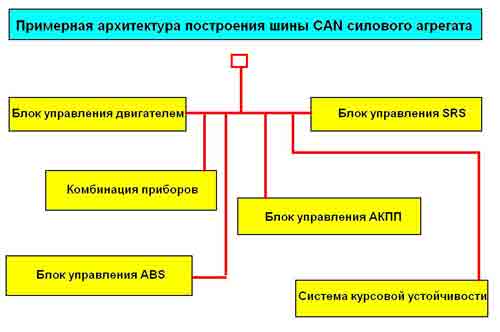
Шина CAN силового агрегата (быст рый канал ) .
Она позволяет передавать информацию со скоростью) 500 кбит/с и служит для связи между блоками управления (двигатель — трансмиссия)
Шина CAN системы «Комфорт» (медле нный канал ) .
Она позволяет передавать информацию со скоростью 100 кбит/с и служит для связи между блоками управления, входящими в систему «Комфорт».
Шина данных CAN информационно — командной системы (медленн ый канал ), позволяющая передавать данные со скоростью 100 kBit/s. Обеспечивает связь между различными обслуживающими системами ( например, телефонной и навигационной системами ) .
Новые модели автомобилей все более становятся похожими на самолеты — по количеству заявленных функций для безопасности, комфорта и экологичности. Блоков управления становится все больше и больше и «тянуть» от каждого грозди проводов — нереально.
Поэтому кроме шины CAN уже существуют другие шины, получившие названия:
– шина LIN (однопроводная шина)
– шина MOST (оптоволоконная шина)
– беспроводная шина Bluetooth
Но не будем «расплываться мыслью по древу», заострим наше внимание пока что на одной конкретной шине: CAN ( по взглядам корпорации BOSCH ).
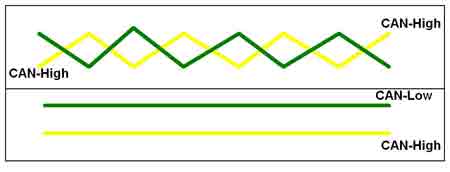
На примере шины CAN силового агрегата можно посмотреть форму сигнала:

Когда на High шине CAN доминантное состояние, то напряжение проводе повышается до 3.5 вольт.
В рецессивном состоянии напряжение на обоих проводах равняется 2.5 вольта.
Когда на проводе Low доминантное состояние, то напряжение падает до 1.5 вольта.
(«Доминанта» — явление, доминирующее, главенствующее или господствующее в какой-либо сфере,- из словарей).
Для повышения надежности передачи данных, в шине CAN применяется дифференциальный способ передачи сигналов по двум проводам, имеющим название Twisted Pair . А провода, которые образуют эту пару, называются CAN High и CAN Low .
В исходном состоянии шины на обоих проводах поддерживается постоянное напряжение на определенном (базовом) уровне. Для шины CAN силового агрегата оно приблизительно равняется 2.5 вольта.
Такое исходное состояние называется «состоянием покоя» или «рецессивом».
Каким образом передаются и преобразуются сигналы по CAN шине?
Каждый из блоков управления подсоединен к CAN шине посредством отдельного устройства под названием трансивер, в котором имеется приемник сигналов, представляющий собой дифференциальный усилитель, установленный на входе сигналов:
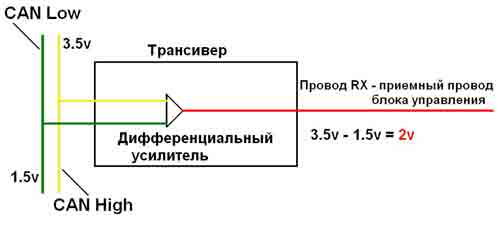
Поступающие по проводам High и Low сигналы, поступают в дифференциальный усилитель, обрабатываются и поступают на вход блока управления.
Эти сигналы представляют собою напряжение на выходе дифференциального усилителя.
Дифференциальный усилитель формирует это выходное напряжение как разность между напряжениями на проводах High и Low шины CAN.
Таким образом исключается влияние величины базового напряжения (у шины CAN силового агрегата оно равно 2,5 В) или какого либо напряжения, вызванного, например, внешними помехами.
Читайте также: Рейтинг зимних шипованных шин 2020 2021 для легковых автомобилей r17
Кстати, насчет помех. Как говорят, «шина CAN довольно устойчива к помехам, поэтому она нашла такое широкое применение».
Попробуем разобраться с этим.
Провода шины CAN силового агрегата расположены в моторном отсеке и на них могут воздействовать помехи различного порядка, например, помехи от системы зажигания.
Так как шина CAN состоит из двух проводов, которые перекручены между собой, то помеха одновременно воздействует на два провода:
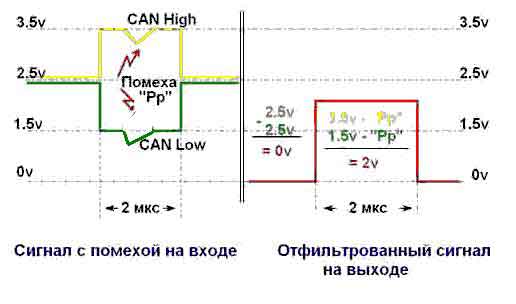
Из вышеприведенного рисунка видно, что происходит далее: в дифференциальном усилителе напряжение на проводе Low (1,5 В – » Pp «) вычитается из напряжения
на проводе High (3,5 В – » Pp «) и в обработанном сигнале помеха отсутствует ( » Pp » — помеха).
Примечание: По наличию времени статья может иметь продолжение — много еще остается «за кадром».
Вас также может заинтересовать:
Шина CAN — это страшно?
Видео:Подробно про CAN шинуСкачать

Еще раз о диагностике CAN-шины

В предыдущей статье мы поговорили о проблемах в шине передачи данных CAN, возникших в результате износа аккумуляторной батареи и просадки питающего напряжения при запуске ниже порога работоспособности шины. Сегодня продолжим разговор о CAN-шине, но немного в другом ключе: прежде всего вспомним принцип ее работы, а затем рассмотрим один из случаев топологии шины и разберем осциллограмму дефекта.
Эта шина используется чаще всего как средство обмена данными в системах, для которых критично быстродействие и время принятия решения. Таковыми являются, например, система управления движением, объединяющая между собой блоки управления двигателем, автоматической трансмиссией, антиблокировочной системой тормозов, усилителем руля и т.п.
Конструктивно шина представляет собой неэкранированную витую пару. Провода шины называются CAN High и CAN Low.
Шина может находиться в двух состояниях:
- Рецессивное состояние, или логическая единица. Оба провода в этой ситуации имеют практически одинаковый потенциал: и на проводе CAN High, и на проводе CAN Low присутствует около 2 , 5 В. В рецессивном состоянии шина может находиться сколь угодно долго, хотя в реальности этого не происходит, ведь рецессивное состояние – это всего лишь пауза между сеансами передачи информации.
- Доминантное состояние, или логический ноль. В него шина переходит тогда, когда один из входящих в сеть блоков управления начинает передачу данных. Потенциалы на проводах шины меняются следующим образом: на проводе CAN High потенциал повышается на один вольт, на проводе CAN Low наоборот, становится на один вольт ниже.
Рассмотрим форму сигнала шины, чтобы обосновать ее помехоустойчивость:

На рисунке показаны доминантный и рецессивный уровни шины, а также воздействие на шину электромагнитной помехи. Особенностью обработки сигналов шины является то, что в расчет берется не сам уровень сигнала, а разница уровней между проводами CAN High и CAN Low. При рецессивном уровне эта разница близка к нулю, при доминантном уровне она максимальна.
В витой паре провода располагаются очень близко друг к другу. Если возникает внешняя электромагнитная помеха X, то она является синфазной и наводит одинаковый всплеск напряжения в обоих проводах шины. В итоге на обоих проводах появляется наведенный помехой импульс, но разница потенциалов между проводами при этом не меняется. Это позволяет эффективно подавлять внешние помехи, что является большим преимуществом CAN-шины.
На самом деле витая пара – давно известный способ борьбы с помехами. В медицине, например, в кардиостимуляторах, где требуется высочайшая помехоустойчивость, она применяется очень широко.
Сигнал шины поступает в блок управления на дифференциальный усилитель и обрабатывается. Иллюстрация поясняет процесс обработки:

Большинство автопроизводителей придерживаются скорости передачи 500 кБд, соответственно, продолжительность одного бита при этом составит 2 мкс.
Поговорим о топологии CAN-шины. Физически у шины нет начала и нет конца, шина – это просто единая сеть. Чаще всего встречаются два типа топологии: линейная топология и топология «пассивная звезда», а также их сочетания.


На современных автомобилях шина CAN очень разветвленная. Чтобы не перегружать линию большим количеством передаваемых данных, шина может состоять из нескольких ветвей, объединенных межсетевым шлюзом, иначе называемым Gateway. В итоге сеть представляет собой несколько ответвлений, в том числе и на диагностический разъем, использующих разную скорость и протоколы обмена.
Поэтому топология шины – вопрос для диагноста очень актуальный и, к сожалению, довольно сложный. Из тех электрических схем, которыми располагает диагност, не всегда можно понять топологию. Но в документации некоторых автопроизводителей приводится полная и подробная информация, в этом случае задача сильно упрощается.
Не зная тонкостей организации шины, найти в ней неисправность бывает достаточно сложно. Например, при наличии окисления контактов в разъеме пропадает связь с целым рядом блоков управления. Наличие под рукой топологии шины позволяет легко находить подобные проблемы, а отсутствие приводит к большой потере времени.
Читайте также: Давление в шинах ваз 2108 летом
Ну что ж, мы немного освежили в памяти теорию шины, теперь самое время перейти к практике.
Перед нами автомобиль Infinitit Q 50 , оснащенный весьма редким турбированным мотором VR 30 DDT объемом 3 . 0 л и мощностью 400 лошадиных сил. Но проблема заключается не в этом замечательном агрегате, а как раз в CAN-шине: подключив диагностический сканер, не удается установить связь с доброй половиной блоков управления.
Нам повезло – Nissan относится к тому узкому кругу производителей, которые дают диагностам качественную и полноценную информацию. В том числе есть в документации и подробная топология бортовой шины обмена данными. Открываем, смотрим:

Следует сказать, что приведенная блок-схема достаточно общая. В документации имеется гораздо более подробная электрическая схема со всеми проводами и номерами контактов в блоках, но сейчас она нам пока что ни к чему, нам важно понять общую топологию.
Итак, первое, что нужно увидеть, это то, что вся сеть разделена на три большие ветви, обведенные пунктиром:
- CAN communication circuit 1 (Коммуникационная цепь CAN 1 );
- CAN communication circuit 2 (Коммуникационная цепь CAN 2 );
- Chassis communication circuit (Коммуникационная цепь шасси).
Первые две цепи связаны между собой посредством CAN gateway (найдите его на иллюстрации). Цепь шасси связана с цепью CAN 2 через блок управления шасси, который также играет роль своеобразного Gateway.
А теперь вновь обратимся к сканеру и посмотрим, какие из блоков управления не выходят на связь. Дилерский сканер предоставляет нам очень удобную функцию: на экран выводятся блоки каждой из цепей по отдельности, а цветом отображается возможность (зеленый) либо невозможность (красный) установить с ними связь. Вот блоки цепи CAN 1 :

А это – блоки цепи CAN 2 . Как видно, связи с ними попросту нет:

Также нет связи с блоками цепи шасси, но это и понятно: эта цепь, согласно блок-схеме, подключена к цепи CAN 2 .
Ну что ж, задача почти решена, осталось лишь локализовать неисправность. А для этого воспользуемся мотортестером и снимем осциллограмму на проводах шины сначала в CAN 1 , а затем в CAN 2 и сравним их.
Сделать это очень несложно, ведь обе шины выведены прямо на диагностический разъем. Согласно более подробной схеме, о которой упоминалось выше, на контакты диагностической колодки 6 и 14 выведены провода CAN 1 , а на контакты 12 и 13 – провода CAN 2 .
Снимаем осциллограмму в цепи CAN 1 . Она имеет прямо-таки академический вид:

Давайте обмерим ее с помощью линеек.
- На проводе CAN High в рецессивном состоянии потенциал составил 2 , 26 В, на проводе CAN Low – 2 , 25 В.
- На проводе CAN High в доминантном состоянии потенциал составил 3 , 58 В, на проводе CAN Low – 1 , 41 В.
- Ширина импульса, соответствующего одной единице передаваемой информации, составляет 2 мкс (обведено красным прямоугольником).
Просто идеальное соответствие теории и практики. Конечно, полосы пропускания нашего прибора явно недостаточно для корректного отображения сигнала, слишком уж широк его спектр. Однако, если закрыть на это глаза, то вполне можно оценить качество сигнала и сделать необходимые выводы.
А теперь делаем ту же операцию на контактах диагностической колодки 12 и 13 , чтобы получить осциллограмму сигнала CAN 2 . Вот она:

Для наглядности масштаб осциллограмм на обеих иллюстрациях один и тот же.
То, что вы видите на этой осциллограмме, называется «мусор». Часто диагносты так и говорят: блок мусорит в шину. Вот только как найти блок, который это делает? Методика здесь очень проста и сводится она к поочередному отключению блоков и повторному наблюдению за сигналом шины.
Где именно находится тот или иной блок на автомобиле, в документации, как правило, показано. Например, на этом «финике» блоки расположены так:

Но в нашем случае все проще. Кстати, маленький лайфхак, возьмите на заметку. В автомобилях Nissan и Infiniti чаще всего причиной наличия мусора в CAN-шине является блок ABS. Сняв разъем с блока, сразу получаем нормальный обмен и связь сканера со всеми блоками ветви CAN 2 :

Обратите внимание на то, что связь в цепи CAN 2 есть со всеми блоками, кроме блока ABS, ведь он отключен.
Завершая разговор, хотелось бы обратить ваше внимание еще на один важный нюанс. Частота следования импульсов по CAN-шине составляет 500 кГц. Поэтому при получении осциллограммы необходимо задействовать максимально возможную частоту дискретизации мотортестера, на какую только он способен.
Если частоту дискретизации вы зададите низкую, то импульсы на осциллограмме будут сильно искажены. В качестве примера посмотрите, как выглядит осциллограмма сигнала CAN-шины при специально сниженной частоте дискретизации прибора:

Красным прямоугольником обведено время, в которое укладывается одно деление сетки. Оно составляет 0 , 2 мс. А на осциллограмме, которую мы рассматривали ранее, это время было равно 5 мкс, поэтому отображение импульсов было более правильным. Имейте это ввиду и не допускайте ошибок!
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле
💥 Видео
лекция 403 CAN шина- введениеСкачать

Автомобиль не запускается, сканер не подключается: на примере FORD FOCUS 3, CAN шина (Видео 92)Скачать
Поиск неисправности в шине CAN мультиметром. Suzuki Grand Vitara. U1073, P1674, B1553.Скачать
Как проверить CAN шину Используем симулятор ElectudeСкачать
С чего начать ремонт ЭБУ: Типы шин данных, CANСкачать
CAN блоки в магнитолах Android или CAN шина в автомобиле ВОПРОС/ОТВЕТСкачать
MCP2515, контроллер CAN шины с интерфейсом SPIСкачать
Блокировка can-шины в фаре Toyota/Lexus. Шок для опытных установщиков. Зачем думать и читать схемыСкачать
Как проверить К-линию.Скачать
Проверка исправности CAN шиныСкачать
Как управлять автомобилем через CAN-шину?Скачать










