
CAN-шина не имеет никакого отношения к автомобильным покрышкам. Дело в том, что в электронике «шиной» называют систему, по которой передаются данные. Это своего рода река с ручейками, если говорить проще. Что касается аббревиатуры, расшифровывающейся как Controller Area Network (сеть контроллеров), то за ней стоит стандарт промышленной сети для объединения в единую сеть различных исполнительных устройств и датчиков.
Принцип работы CAN-шины
CAN-шина, будучи системой цифровой связи и управления электронными устройствами, позволяет осуществлять обмен информацией между блоками управления. Сеть имеет три основных режима работы – активный при включенном зажигании, спящий при выключенном зажигании и, наконец, режим пробуждения и засыпания, когда зажигание включают и выключают.
CAN-шина выполняет ряд задач, среди которых ускорение передачи сигналов к разным системам, механизмам и устройствам, уменьшение количества проводов, упрощение подсоединения и работы дополнительных устройств.
Виды CAN-шин
Существует три основных вида.
Силовые обеспечивают синхронизацию и обмен данными между ЭБУ двигателя и основными агрегатами и системами автомобиля – коробкой передач, зажиганием и другими. «Комфортные» нужны, соответственно, для работы опций комфорта. Например, климатической системы, электропривода зеркал и обогрева сидений.
Информационно-командные введены для обмена данными между ЭБУ и такими вспомогательными информационными комплексами как навигационная система.
Как передается информация
Итак, CAN-шина представляет собой сеть, по которой происходит обмен информацией между устройствами. Возьмем для примера блок управления двигателем – он имеет не только основной микроконтроллер, но и CAN-устройство, которое формирует и рассылает импульсы по шинам H (CAN-высокий) и L (CAN-низкий), которые называются витая пара.
Сигналы рассылаются по витой паре трансивером или приемопередатчиком. Он нужен для целого ряда задач – усиления сигналов, защиты линии в случае повреждения CAN-шины, создания условий помехозащищенности передаваемых импульсов и регулировки скорости их передачи. В автомобильной промышленности применяются передатчики двух типов с говорящими названиями High Speed и Fault Tolerant. Первый обеспечивает передачу данных на высокой скорости, до 1 мегабита в секунду. Второй не столь быстрый и передает в секунду до 120 килобит в секунду, но при этом допускает отклонение от параметров CAN-шины и не столь чувствителен к ее качеству.
Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате образуется общая нагрузка шины CAN.
Общее сопротивление нагрузки зависит от числа подключенных к шине электронных блоков управления и исполнительных механизмов.
Рис. 2. Фрагмент CAN-шины с распределением нагрузки в проводах: CAN High CAN Low
Системы и блоки управления автомобиля имеют не только различные нагрузочные сопротивления, но и скорости передачи данных, все это может препятствовать обработке разнотипных сигналов.Для решения данной технической проблемы используется преобразователь для связи между шинами.Такой преобразователь принято называть межсетевым интерфейсом, это устройство в автомобиле чаще всего встроено в конструкцию блока управления, комбинацию приборов, а также может быть выполнено в виде отдельного блока.
Рис. 3. Блок-схема межсетевого интерфейса
Схемы CAN-шины
Такая схема подключения устройств называется параллельной схемой подключения. Для достижения максимальной скорости волновые сопротивления блоков должны согласовываться. Если выходит из строя один из блоков (трансмиттеров), этот блок может «завалить» всю шину.
Все сообщения, которые передаются по шине, имеют определенный цифровой код.
Это позволяет производить компьютерную диагностику при помощи опроса блоков по шине.
Диагностическое устройство преобразует цифровые коды и сигнал в абсолютные значения либо коды ошибок.
В спящем режиме CAN-шина полностью не бездействует. Большинство автомобилей используют шину для организации сбора информации дла системы сигнализации и охраны, собирая информацию по шине о датчиках проникновения, контактных устройствах.
Видео «Диагностика авто с помощью CAN шины»
Разновидности функций шин
Существуют разные типы представленного устройства.
- КАН-шина агрегата силового. Это быстрый канал, который передает послания со скоростью 500 кбит/с. Его главная задача заключается в коммуникации блоков управления, например трансмиссия-двигатель.
- Система «Комфорт» — более медлительный канал, передающий данные со скоростью 100 кбит/с. Он связывает все устройства системы «Комфорт».
- Информационно-командная программа шины также передает сигналы медленно (100 кбит/с). Ее основное предназначение — обеспечить связь между обслуживающими системами, например телефоном и навигацией.
Типы сообщений
Протоколом предусматривается использование при обмене информацией посредством шины CAN четырех типов команд.
- Data Frame. Такой тип сообщений (фреймов) передает сигналы с определенным идентификатором.
- Error Frame представляет собой сообщение сбоя в процессе обмена. Он предлагает повторить действия сначала.
- Overload Frame. Послание появляется в момент необходимости перезапустить работу контроллера.
- Request Frame Remout Transmission обозначает запрос данных, где именно находится идентификатор.
II — резистор сопротивления;
В процессе приема-передачи информации на проведение одной операции отводится определенное время. Если оно вышло, формируется фрейм ошибки. Error Frame также длится определенное количество времени. Неисправный блок автоматически отключается от шины при накоплении большого количества ошибок.
Функциональность системы
Команда состоит из 3 разделов: имени, значения события, времени наблюдения за переменной величиной.
Ключевое значение придается переменной показателя. Если в сообщении нет данных о времени, тогда это сообщение принимается системой по факту его получения.
Когда компьютер коммуникационной системы запрашивает показатель состояния параметра, он посылается в приоритетной очередности.
Разрешение конфликтов на шине
Когда сигналы, поступающие на шину, приходят на несколько контроллеров, система выбирает, в какой очередности будет обработан каждый. Два или более устройства могут начать работу практически одновременно. Чтобы при этом не возник конфликт, производится мониторинг. CAN-шина современного автомобиля производит эту операцию в процессе отправки сообщения.
Существует градация сообщений по приоритетной и рецессивной градации. Информация, имеющая самое низкое числительное выражение поля арбитража, выиграет при наступлении конфликтного положения на шине. Остальные передатчики постараются отослать свои фреймы позже, если ничего не изменится.
В процессе передачи информации время, указанное в нем, не теряется даже при наличии конфликтного положения системы.
Физические составляющие
Устройство шины состоит, помимо кабеля, из нескольких элементов.
Микросхемы приемопередатчика часто встречаются от компании Philips, а также Siliconix, Bosch, Infineon.
Для этого на конец проводников устанавливаются резисторы сопротивления по 120 Ом. Это необходимо, дабы устранить отражения сообщения на конце шины и убедиться, что она получает соответствующие уровни тока.
Сам проводник в зависимости от конструкции может быть экранированным или неэкранированным. Концевое сопротивление может отходить от классического и находиться в диапазоне от 108 до 132 Ом.
Скорость передачи данных CAN-шины
Все составляющие сети CAN должны иметь единую скорость передачи информации. Однако данный стандарт не задает одного определенного параметра, ограничиваясь лишь максимальным пределом – 1Мбит/с. Изменения объема передаваемого кадра должно успеть распространиться по всей длине сети, что ставит в обратную зависимость скорости от протяженности – чем длиннее провод, тем ниже скорость. Для передачи 1Мбита за 1секунду нужная длина должна составлять не менее 40 метров. Добавьте к этому объективные факторы, снижающие скорость – защита от помех и разветвленная сеть, где происходят множественные отражения сигнала.
В угоду ускорения процесса разработчики уменьшают протяженность проводов, одновременно увеличивая число цепей с возможностью подключения большего количества приборов. Например, общая длина шины, составляющая 10 метров, способна пропускать через себя кадры, со скоростью 2 Мбит/c, с 64 подключенными приборами. Если автомобиль снабжен большим числом электрооборудования, то добавляется одна, две цепи или более.
Can шина форма сигнала
Страсти вокруг кода P 0500, часть 4
Посмотрим тему: «Toyota Corolla 2ZR-FE 2012, Ошибка Р0500»,- http://forum.autodata.ru/264/23671/all.htm
Почему когда задается вопрос по CAN … то ответ начинается всегда :-« КАН- шина это…»….
Да не о шине вопрос, вопрос о системе.
Описание шины CAN: CAN шина — CAN BUS — КАН ШИНА Controller Area Network — CAN шина
Впервые идея CAN была предложена в середине 80-х немецкой компанией Robert Bosch, которая задумывала ее в качестве экономичного средства для объединения контроллеров, расположенных внутри автомобиля. Традиционный способ связи распределенных по объекту контроллеров жгутами проводов по своей технической сложности, по ценовым и по весовым параметрам для столь массового изделия, коим является автомобиль, оказался непригоден. Требовалось альтернативное решение, сокращающее количество проводов, поэтому был предложен протокол CAN, для которого достаточно любой проводной пары.
Вот так примерно. И что следует из этого пояснения? А то, что, если бы не R . Bosch , мы бы до сих пор лаптем щи хлебали. Увы, это не так. А то, что предложил Bosch , так это касается транспорта. А все остальное было и работало до него. Теперь относительно CAN — тут непонятно совершенно, что это. В начале: «идея CAN » , в конце пояснения: «протокол CAN ». И что же такое CAN , протокол или идея?
Читайте также: Утилизация шин рядом со мной
Поэтому начнем с определения:
CAN — это система обмена данными между контролерами (процессорами) блоков управления включенных, или задействованных для управления объектом.
В нашем случае, объектом управления является автомобиль, фото 1:
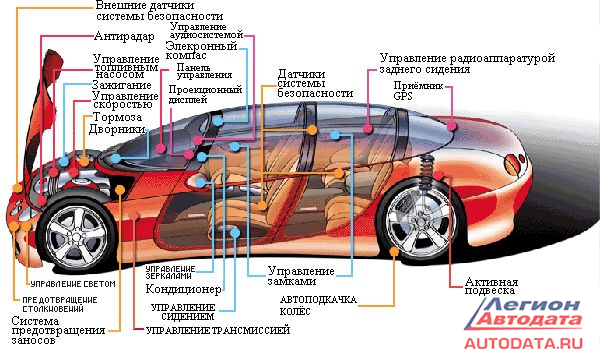
Сейчас уже очевидно, что помимо управления впрыском и зажиганием требуется кое-что еще. Количество систем в автомобиле увеличилось. И все они в той или иной мере, принимают участие в управлении объектом, а значит, обмен данными между ними неизбежен. Все блоки управления систем включаются в общую шину обмена данными. Поэтому существует общая шина обмена данными, и существуют шины, соединяющие блоки управления с общей шиной. CAN -шина — это всего лишь «среда» , в которой происходит обмен данными. Это может быть и витая пара, и оптоволокно, и коаксиальный кабель. Все зависит от скорости и объема данных. Что касается «цены и экономии меди» я пропущу. Об этом достаточно написано. А вот о нескольких основных принципов, положенных в основу работы данной системы(сети), сказать стоит.
— Обмен данными идет дискретными сообщениями. Формат этих сообщений строго определен. Каждое сообщение несет в себе информацию только об одном параметре (скорость, скорость вращения КВ, температура ОЖ и пр.) Вот эта часть сообщения называется типом сообщения. И каждому сообщению присваивается идентификатор типа. И есть еще «хвостик» в конце сообщения из двух бит, который служит для проверки правильности переданного/принятого сообщения. Это избыточный код. Информации он не несет никакой, но если сообщение будет искажено, то это станет сразу очевидным. И такое сообщение не будет принято как достоверное. Другими словами – это контрольная сумма.
На что похож установленный формат для сообщений в CAN ? Правильно, на обычную телеграмму. Адрес, сообщение, подпись.
— При построении CAN априорно предполагается, что количество блоков управления включенных в нее относительно невелико. Следовательно, и количество типов различных сообщений невелико. И ограничение на количество блоков управления и типов сообщений накладывает сам объект управления. Все зависит от его технологической сложности. В нашем случае мы имеем всего лишь простой автомобиль.
А если это так, то возможно построить безадресную и абсолютно децентрализованную систему.
Сторонники анархии могут успокоиться …-)), ничего похожего на анархию в системе CAN не может быть. И конфликтов нет – все разрешается быстро, спокойно и просто. Дисциплина в системе жесткая. Протоколом установлены четыре вида служебных сообщений, называемых фреймами:
Data Frame — это фрейм передачи данных. На простом языке это звучит примерно так:- «Вот данные с идентификатором Х, получайте»
Error Frame — это фрейм ошибки- «так, СТОП! Все сначала!»
Overload Frame — это фрейм, служебное сообщение перегрузке контролера.- «Всем ждать, я занят. Чуть позже… все успеете»
Remote Transmission Request Frame – это служебное сообщение запроса данных . «А где у нас начальник транспортного цеха? Где сообщение с идентификатором Х?».
Для передачи и приема сообщений в системе есть время, и если сигнал не поступил в отведенное для него время, формируется такой запрос. Запрос по ошибке также идет не бесконечно. Счетчик считает количество ошибок. И в итоге неисправный блок может быть отключен от шины… чтоб под ногами не путался -).
В шине CAN биты 0 и 1 имеют ещё одно название: рецессивный уровень и доминантный уровень, соответственно. Если двумя разными передатчиками будет одновременно передан рецессивный и доминантный уровни, то доминантный уровень подавит рецессивный. Вот на этом построен арбитраж на шине. Каждый передатчик одновременно считывает то, что он предаёт в шину. Передатчик с более низким приоритетом вынужден «отпустить шину», так как чужой доминантный уровень с более высоким приоритетом исказил его передачу. В то же время, сообщение с более высоким уровнем остается неизменным. Передатчик, «отпустивший шину», может повторить попытку через некоторое время
Это вам не в очереди за медицинскими полюсами… где возле одной двери сошлись Герой Соцтруда, Ветеран Куликовской битвы и Мать Героиня на сносях.
А вот теперь цитата с форума, а вы попробуйте определить, что в ней неверно. Основные принципы построения и назначение системы описано выше. « Наверное и CAN- шина заходит в комбинацию. Для работы стрелки спидометра. Информация о скорости идет по CAN-шине от блока ABS. Хотя та же шина заходит в ЕСМ, но информацию о скорости авто ЕСМ получает от блока ABS через комбинацию. Автор не проследил сигнал на этой цепи. А надо было. Блок ABS, наверное, фирмы Бош? Да ладно, съели давно уже это. »
Если блоки управления включены в систему обмена данных, возможна ли ситуация, когда информация получается через кого-то (через панель). А ЕСМ, включенный, в эту же шину сигнала этого не видит? НЕТ.
Значит , сигнала о скорости автомобиля в шине нет . Эта ситуация аналогична другой: вам адресованная телеграмма приходит вашему соседу сначала… и он решает, отнесу я ее завтра…или вечером. И Бош «под руку подвернулся кстати», тоже досталось. Нет, уважаемые коллеги, система CAN — это не наш форум. В ней несколько простых правил и арбитраж. И полный порядок при полной децентрализации. Так что действительно «съели» — «еду» в пакетике. И теперь разбираемся, что же входило в ее состав.
Ну вот если коротко о принципах построения системы CAN , которые должны быть понятны человеку решившему побороться с ошибкой .
Поэтому нужно сделать первый вывод: CAN — это система (или сеть, кому как больше нравится), на которую возложены диспетчерские функции, в общей системе управления объектом. И ничего более. Все системы существовавшие до этого без нее и с ней, как выполняли свои функции, так и выполняют. Как существовали коды ошибок по ним, так они и остались. Как были методики работы по кодам ошибок, так они и остались.
Просто нужно учитывать особенность: коды ошибок, считанные с системы управления двигателем, АКПП и пр., могут оказаться не доминирующими, поскольку обмен информацией и получение информации идет по системе обмена данными. А в ней есть тоже чему ломаться.
Что сбивает с толку, и что пугает некоторых диагностов, и не только начинающих.
К чему привыкли? А привыкли к тому, что вся информация, и весь обмен ею был адресный. Сигнал от датчика, разъем … пин №… далее на промежуточный разъем, пин №…. Далее красным проводом на пин № блока управления. И все это можно проверить хоть осциллографом, хоть мультиметром. А главное те, кто имел навыки по работе или работал автоэлектриком, или просто знает порядок поиска неисправностей в обычных цепях, сейчас оказался в « позе глубочайшей задумчивости». Мало того, что не все понятно, но и способы проверки не подходят.
Предлагаемые же способы, в том числе и производителем, скудны. И порой не приводят к желаемому результату. И в большинстве случаев диагност стоит перед выбором: « заказать целиком узел или блок, или продолжить поиск». Как бы все проверил, и как бы все нормально. И шел по шагам как в программе, а уверенности нет… А блок стоит не пятак. А если клиент его купит, а неисправность останется, что тогда?
Вот такая ситуация была с Лексусом. Диагност приговорил и блок, и рулевую рейку с датчиком. А клиент «притаранил» это все. И через несколько часов стало понятно, что не тот «бобик сдох». Выход?
Понятно, что клиент сейчас взвоет, и взвоет на полную стоимость. Хотя приобрел это все за полцены у официалов. Я никакой тайны не раскрыл, просто озвучил реальную ситуацию. Те, кто занимается ТО новых авто, как раз этим занимаются тоже. Это не считается кражей, это не скупка краденного… это называется очень толерантно: «купить деталь, по цене ниже, чем у производителя». Но суть не в этом. Машину нужно вернуть в исправном состоянии владельцу. Тогда будут и волки сыты и овцы целы. «Корпоративность» нашему брату, как и специалистам других профессий, не чужда. Многие сотрудничают между собой и помогают друг другу в подобных ситуациях. Клиент же об участии в ремонте «третьей стороны» просто не ставится в известность. Знаете, почему диагност приговорил и блок и рейку. Потому, что… хрен его знает, может это, а может это. А «цепи» он проверил. Проверил и ошибся. И неисправность пропустил, просто ерундовую, на коннекторе. Потому что проверял согласно методики… мультиметром, в режиме измерения сопротивлений.
Читайте также: Утилизация шин класс отходов
Давайте немного подробнее, о самом простом, о витой паре. Фото 2:
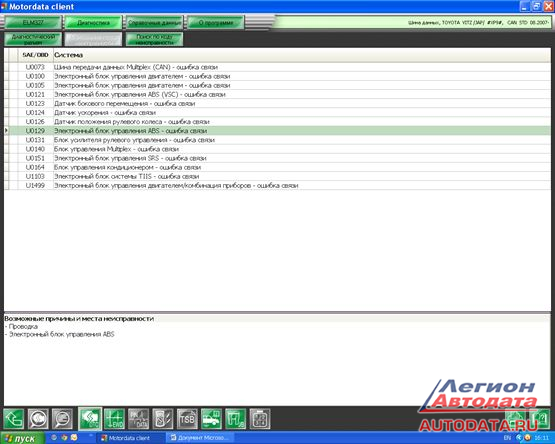
Скрин сделан с Мотордаты. Хотя без разницы, можно и любой иноземный мануал взять, результат будет тот же. Все неисправности в CAN сведены к трем возможным:
— неисправность блока;
— неисправность проводки (шины);
— наведенные помехи в шине данных.
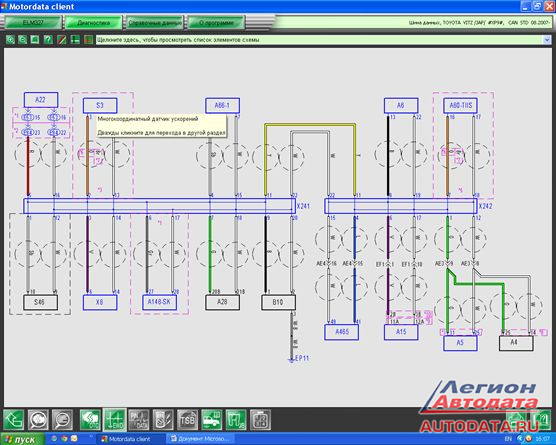
Способы проверки просты. Дается вот такая, или наподобие картинка, фото 3:
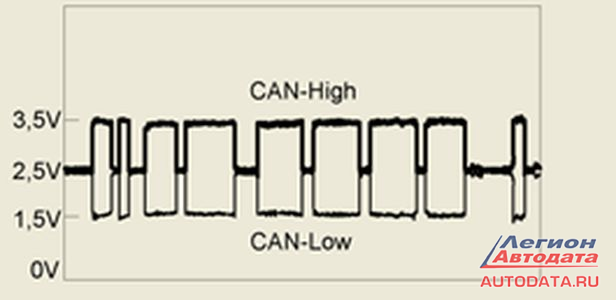
И предлагается выполнить осциллографирование… или использовать тот же омметр.
Посмотрите на эту картинку внимательно. Затем возьмите каждый свой мультиметр, которым вы работаете ежедневно… и вытащите из него источник питания и посмотрите, на сколько он Вольт. И сравните его со значением уровней, которые действуют в шине. Так вот, обрыв и замыкание вы обнаружите, в этом сомнений никаких нет. А ассиметрию в шине, длиною в 1метр или менее? Да даже если взять витую пару предельно допустимой длины — 4 метра… фигушки.
А у нас же у каждого есть осциллограф! И осциллограмма какая-никакая есть для сравнения. Ну – ну… Именно так, чтобы не затевать дискуссий скажет тот, кто знает что такое осциллограф, тот, кто изучал этот прибор и работал с ним. И на этих людей слабо действуют рекламные трюки: «простой в использовании, интуитивно понятный интерфейс…» Их больше интересуют возможности прибора. А что касается наших осциллографов, которыми мы работаем, так они «кастрированы» по сигналы системы управления. Могут выполнять отдельные функции мотортестера. Все. Так что сравнивать и анализировать сигнал подобным прибором…
Мне попался производитель осциллографа в интернете, который честно сказал о своем приборе:«можно наблюдать цифровой сигнал» . Вот его скрины. Фото 4 и фото 5:
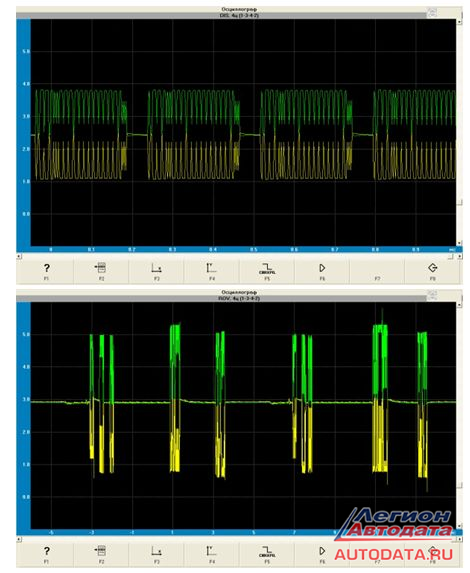
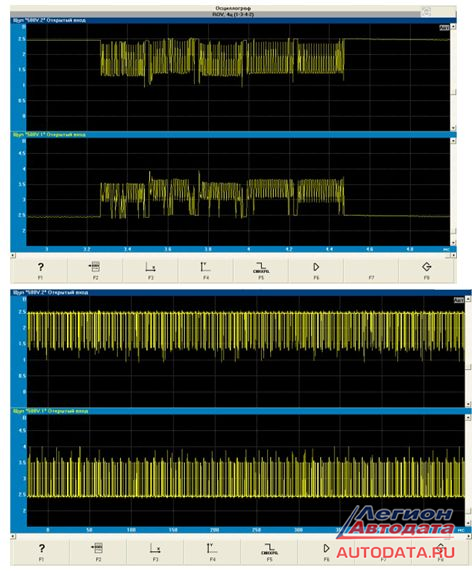
А теперь я дам другой скрин, и посмотрим где удобнее, фото 6:
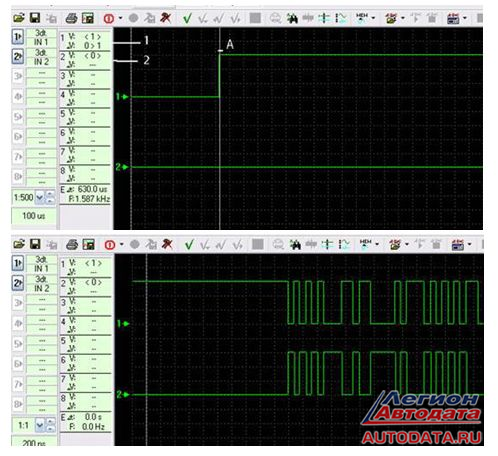
Есть разница? Существенная. А как она повлияет на поиск неисправности той же «ассиметрии в витой паре»? А никак. Потому что при всей красоте и наглядности, это не то, мягко говоря. Вот если бы к этой красоте и наглядности те показания которые мы на осциллографе видим, тогда «да» скажут некоторые… А добавлю, не совсем «да». Что касается сравнения, многие не знают, ведь дело имеем с цифровым сигналом, тут еще надо точку выбрать для отсчета и сравнения, а для этого нужно записать сигнал. И потом только сидеть и пыхтеть над осциллограммой. И записывать нужно долго… Конечно, как говорят: «на безрыбье…». Ассиметрию проще всего выявить по уровням сигнала. И осциллограф, имеющий возможность измерять значения напряжения до третьего знака после запятой, это прямо скажем не только «кое-что». Но все-равно это долго, нудно. В самой витой паре отклонения от параметров маловероятны, ну если только брак. А вот соединения — да. Они могут.
Любое соединение на цифровой шине — это неоднородность . От неоднородности электрический сигнал отражается. Любая неоднородность вызывает затухание сигнала и может приводить к его искажениям. Поэтому стандартом (протоколом) для таких систем предусматриваются отдельные требования: (и величина допустимой ассиметрии в витой паре, и требования к конекторам (местам соединений), и рабочему затуханию сигнала в ней.)
Пайка на витой паре, насколько мне известно, не приветствуется. В случае ее повреждения, соединение восстанавливают с помощью вот таких клипс, фото 7:

Проводки вставляются в отверстие, нажимается оранжевая кнопка, провода зажимаются между двумя посеребренными пластинами. А пустоты в отверстиях, куда вставлен провод, заполняются гелем (давится капсула внутри), который застывает и герметизирует соединение. Вот почему мультиметр для поиска неоднородностей не подходит. Неоднородности настолько незначительны для омметра, что он их просто не видит. Скрутку, которую сделает сигнальщик случайно перекусивший кусачками провод, вы не увидите. А в системе обмена данных из-за этой неоднородности сразу упадет скорость, возникнут искажения, ошибки и получите СЕ. Но самая интересная особенность витой пары это то, что она сохраняет работоспособность при повреждении одного из проводов. Это один из вариантов, когда есть ошибка по CAN , а все работает. Нет ничего, нет никаких других признаков и сбоев работе других систем. И если владелец дотошный и узнал о такой ошибке (СЕ при этом может и не гореть), мозг будет выносить не на одном СТО. Вот это нужно иметь ввиду. Здесь просто система либо фиксирует моменты, когда сигнал приходит не в установленное время; скорость обмена данными снизилась, либо при определенной последовательности обмена возникает искажение, возникающее за счет отражения сигнала от неоднородности. И когда счетчик заполняется — ошибка вылазит.
Что нельзя проверить в системе? В системе не получается или не всегда получается имеемыми средствами проверить исправность контролеров CAN . Если это удается, то тогда, в некоторых случаях, клиент несет меньшие затраты по ремонту. А диагност получает не только моральное удовлетворение, а значительное заслуженное материальное. Система CAN не новинка. Системы обмена данными существовали и до нее. И более серьезные, замечу я вам. Но как-то вопрос о поиске неисправностей и их локализации не стоял. Стандарт CAN также ничем не отличается от тех стандартов, и в нем предусмотрен этот вопрос. Просто система, несмотря на то, что давно разработана, вводится по частям, а не в полном объеме сразу. Ведь развитие самих систем управления применяемых в автомобиле тоже на месте не стоит. Да плюс еще пресловутый маркетинг. Которому отдача нужна сейчас и немедленно. Есть новое, давай-давай! Потом доработаем. Главное, есть фишка, которая позволяет реализовывать продукцию и получать прибыль. И не только от продажи автомобилей.
А придет время, и CAN будет тестироваться со сканера, обычно и привычно .
Как скажем, сейчас вы это делаете с клапаном РХХ, или проверяете работу исполнительных механизмов системы кузова и панели приборов… сидя в автомобиле. Но пока вот так. Здесь трудно помочь тем, кто не имеет базовых знаний. А те знания, которые приобретаются за деньги или через интернет, могут принести больше вреда, чем пользы. Вот поэтому я никогда не отвечаю на вопросы типа: «на какую ногу нужно встать… что нужно покрутить и пр.» Потому что «вставать и крутить» — это нужно осознавая что делаешь, а не на авось. Потому что человек, научившийся так выполнять ремонт, толком не понимая, что сделал, потом еще и теорию может двинуть, основанную на личном практическом опыте. И переубедить его не получится.
А желающих освоить подобный опыт, чтобы «быстро, не потея и не вникая» у нас хоть отбавляй. Рынок предлагает и приборы для поиска неисправностей в системе CAN . Я не буду говорить что там плохого, что хорошего. Просто скажу- это все не то. Подключить анализатор для проверки CAN шины, послать и принять до десятка тысяч сообщений теста, затем убедиться в том, что они прошли и данные не потеряны… а если есть потерянные данные, значит, шина неисправна. Нормально. Мне уже сканер сообщил, что неисправность есть.
Так вот, нужен прибор хоть за 100$ хоть за 1000$. хоть больше, но чтобы он давал уверенную возможность локализовать неисправность хоть в шине, хоть в контролере CAN любого блока управления включенного в систему. Хотелось бы проверять шину методом зондирования, и видеть все неоднородности в ней, а не посылать поток тестовых данных, а потом смотреть, что там прошло, а что нет. Чтобы можно было определить расстояние от точки подключения прибора до места неисправности в шине. Хотелось бы иметь прибор, который позволяет дать служебную команду: Remote Transmission Request Frame « А где у нас начальник транспортного цеха? Где сообщение с идентификатором Х?», и вот тогда бы не возникало двойственных ситуаций, и можно точно было сказать исправен блок или нет. Потому что такой запрос можно бы было делать на блок, отключив его от шины данных. «Помечтай, помечтай» -, кто-то скажет. Отвечаю скептикам — подобное оборудование использовалось тогда, когда o CAN на автомобилях и не слышали. Но мне немножко посчастливилось подержать в руках, нечто подобное. Ну а пока могу только сказать, где почерпнуть информацию о проверке витых пар. Это у связистов. У них это фундаментально, эдак, года с 1965 в учебнике «Теория проводов» расписано уже было. А к концу 60-х уже и оптоволокно. Сейчас уже есть информация и по витым парам, общепринятая, типы для них установлены, и требования приняты. Вот там можно найти цифры, которые помогут при поиске неисправности.
Читайте также: Какие шины лучше для низкопрофильные
Был вопрос в теме http://forum.autodata.ru/264/23671/all.htm а бывают ли цифровые датчики? Бывают… будь они неладны. Фото 8:
Вот он, красавец. Включен прямо в шину данных. А это значит что он цифровой. Потому что любая импульсная последовательность, если попадет в шину данных, подавит там обмен информацией сразу. А этот датчик формирует сообщение такого же формата, как описано в самом начале. И проверить его можно, несмотря на то, что он цифровой.
А путаница идет и вопросы возникают потому, что многие либо не имеют, либо пренебрегли основополагающими знаниями. Было такое, когда попытка объяснить разницу между аналоговым сигналом, импульсной последовательностью, цифровым сигналом… мягко, скажем, заканчивалось ничем. А если прямо сказать — невежество побеждало. Поэтому и по сей день можно услышать : «шире-уже, пауза-промежуток, частота импульсной последовательности и пр. А цифровой сигнал — это вообще сигнал датчика Холла, если его уровень привести к логическому».
Если взять ось времени и над нею изобразить аналоговый, изменяющийся во времени сигнал, то в любой момент времени значения этого сигнала будут различны. И их будет множество.
Если взять ось времени и над ней изобразить импульсную последовательность из прямоугольных импульсов, то в любой момент времени значений будет всего лишь два: — это либо низкий уровень( амплитуда), либо высокий.
Если над осью времени изобразить цифровой сигнал то мы в различные моменты времени будем видеть либо уровень логического ноля, либо единицы, либо переход из одного состояния в другое.
Цифровой сигнал — это данные в виде цифрового кода. На осциллографе мы можем видеть импульсы, но ни один из параметров импульсной последовательности или импульса к цифровому сигналу неприменим.
А внешняя схожесть в чем-то может быть, но это ничего не означает. И суть совершенно в другом. Вольное трактование меняет не «терминологию», как многие считают. А искажает саму основу и возможность понимания процесса и сути.. Это разные вещи.
Вот как выходит, пока машинки были старые, там можно было толкать любую «теорию» от «конкретного практика». Сейчас уже номер не проходит. Хочешь разобраться — начинай с основ. Но желание «скажи к какой ноге подпаяться осталось».
И еще что хотелось бы отметить:- жаргон технический или то, что многие используют при объяснении или общении… Это тоже не терминология. Это … короче смотрим, фото 9:
Мировой шедевр. Сальвадор Дали. Называется картина:«Сон, навеянный полетом пчелы вокруг граната за миг до пробуждения.» Это сюрреализм. Я в нем полный ноль. Поэтому потратил время, пока нашел пчелу, летающую над гранатом. Это все, что я смог. Оценивать картину я просто не могу, а сказать, что на ней изображено, и объяснить смысл, тем более.
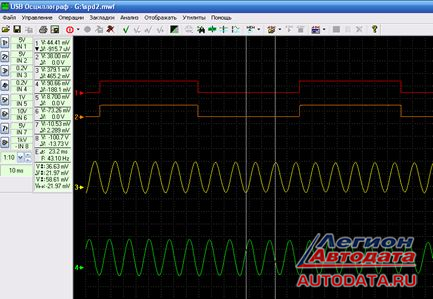
Сигнал на каналах 3 и 4 назван «пилой». Это конечно не С. Дали… это незнание основ импульсной техники. И жаргонное слово «пила» применено не просто не к месту. На жаргоне «пила» — это импульсы пилообразной формы. И генераторы таких импульсов применяются в блоках развертки, но ни как ни в системах управления. Потому что такой импульс не может содержать в себе информацию о состоянии, или каком — либо качественном параметре. У них другое назначение.
Так вот, во втором случае жаргон можно принять, он не меняет основ. А в первом — меняет и искажает, потому что это совершенно другой сигнал. Это все равно, что валенок горшком назвать, и только лишь потому, что и туда и туда жидкость можно налить. Но в горшке можно хранить, варить, есть в конце концов… а из валенка слабо? А на форуме не слабо, прикрыть пробел в фрагментальных знаниях жаргонным красивым словечком, или фразой на иноземном языке. А то и целой выдержкой из текста. Можно читать по-английски, можно переводить, но думать нужно на родном языке. А если, прочитав иноземный текст, не можешь объяснить это на том языке, на котором тебя учили думать, извините уважаемый, вы сути процесса не понимаете.
Но есть еще и «помощники», которые помогают достичь определенной стадии невежества. Это торговцы информацией. Есть и доморощенные, есть и от официалов. Ну вот например, фото 12:
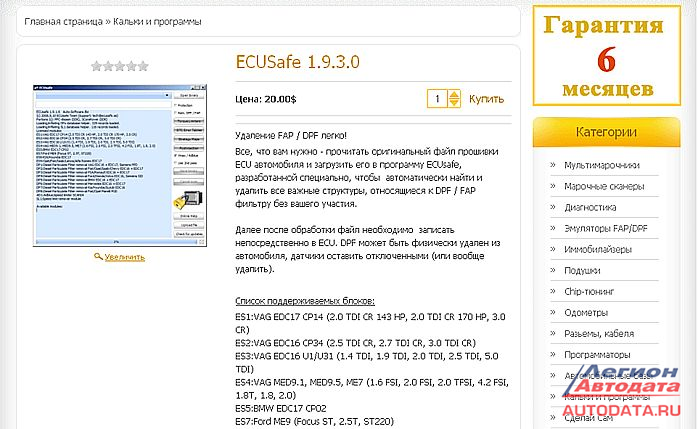
Все легко! А главное:«ничего не бойся». Есть еще видеокурс. Там подороже 300$, но принцип тот же: «легко! И ничего не бойся». Расчет на тех, кто ищет «ногу, на которую нужно встать» и решить разом все проблемы. А раз есть спрос, есть предложение. Рынок, однако.
От официалов продавцы опаснее. Их продукция привлекает внешним видом, простотой пояснения, и на первый взгляд кажется, что именно сама суть изложена, и ничего лишнего.
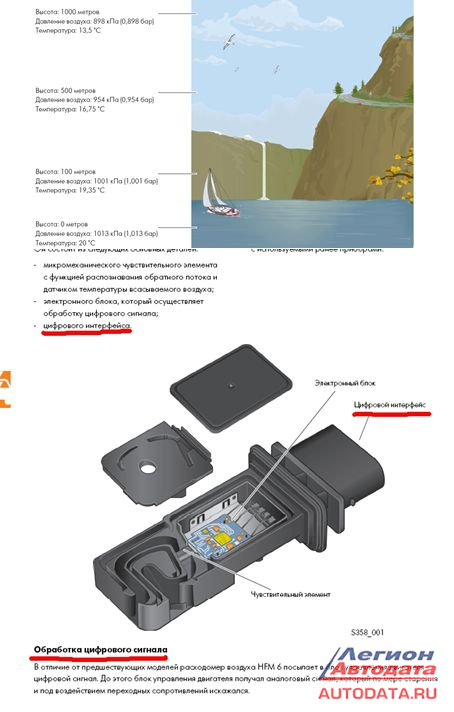
Вот так, сначала известная всем эмблема автопроизводителя. Затем картинки. Минимум текста, море, яхта природа… Воспринимается «на ура». Но картинками все не пояснишь, надо что-то писать… И вот как начали писать, так сразу и видно стало. Оказывается, датчик-то цифровой. Вот так. Век живи, век учись. Или так: «хочешь научиться- фильтруй информацию». Где не понимаешь, спрашивай у тех, кто может объяснить.
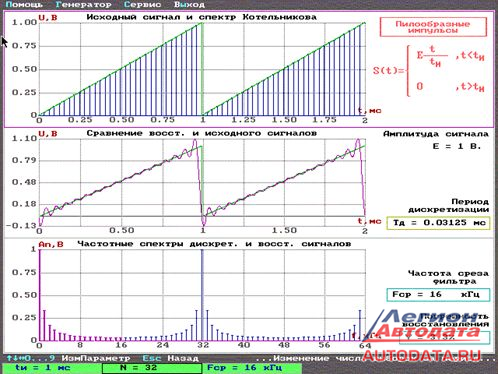
И крупным планом финал, фото 15:
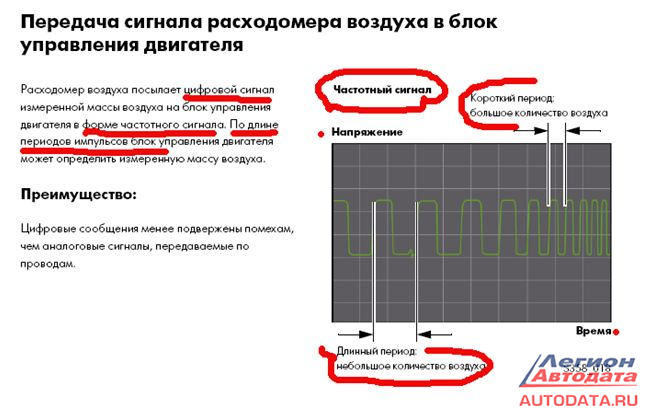
Ну, тут без полулитры не разобраться… Но попробуем. Допустим, что сигнал цифровой… только допустим… Но передается он не виде данных (цифрового кода), а в виде «формы частотного сигнала». Что это за зверь — непонятно. Но и это не все. Оказывается, информация цифровая заложена не в коде, а в длине периодов импульсов. Если предположить, что сигнал «частотный», то основной параметр у него частота. Откуда периоды взялись – не понятно. Текст осилить не удалось. Попробуем изображение рассмотреть сигнала. Видим последовательность прямоугольных импульсов. О том, что это именно импульсная последовательность, говорят оси на которых она изображена. Это ось времени и ось величины амплитуды сигнала (напряжение), кроме того, четко выделен период в импульсной последовательности.
А это означает только одно — сигнал датчика представляет собой импульсную последовательность. С ярко выраженной дискретностью. Возьмите любые моменты времени на оси и им будут соответствовать только два значения – максимальная амплитуда или минимальная. Цифровым сигналом тут и близко не пахнет. Если бы это был он, то изображение было бы только на оси времени. И никаких периодов, и никаких частот. Цифровой сигнал это данные в виде кода. А здесь данные о количестве воздуха заложены в величине периода .
Вот и все. Человек, прочитавший это будет лепить усвоенные им термины:- «цифровой, частотный, длину периода и прочий бред» — к любому сигналу, который будет похож на изображенный. И будет ставить знаки равенства между несовместимыми понятиями. Затем купит программку по удалению… или еще что-то. И в итоге может крепко попасть… и ладно, если это будет просто определенная субстанция, определенной консистенции. А можно и серьезнее …
Время изменилось, подходы тоже. Без понимания процессов уже нельзя работать. Поэтому, если у кого-то вдруг возникает вопрос… элементарный, из букваря. Наверное, правильно будет не ухмыляться или отшучиваться, или отвечать на вопрос вопросом, а объяснить. А если нет желания — промолчать, кто-то другой ответит. Потому что это не вина человека задающего такой вопрос. Это беда. И беда не одного.
Вот сколько всплыло всего в обыкновенной теме. А началось-то все с простого кода Р0500. Да, совсем забыл. Шин, где используется оптоволокно, вообще не нужно боятся. Их проверить очень легко. Для этого нужно иметь всего лишь источник света. Все шины сходятся в общую, соединение параллельное. Поэтому подсветив любую шину вы увидите свет на других, а там где он не проходит – шина повреждена.
О многом написано в наших статьях на Легион-Автодате: autodata.ru/article/ .
Как там говорят: «Ищущий да обрящет?». Всё правильно. А если проще, то так: «Без труда не выловишь . «. Ну вы поняли -) .
Маркин Александр Васильевич
(ник на форуме Легион-Автодата — A_V_M)
г. Белгород, Таврово мкр 2, пер.Парковый, д.29-б.