
Этот вопрос мне пришлось задать себе лет десять назад или больше. Работа, которую надо было сделать, заключалась в дарении второй жизни диспетчерскому щиту. Это такая штука во всю стену, состоящая из лампочек и выключателей с переключателями. Думаю, не ошибусь, предположив, что щиты стали делать с тех пор, как появились лампочки, поскольку выключатели к тому времени, наверняка, уже были известны. А тяга к прекрасному, вообще, пришла к людям из далекой древности.
Сейчас многие предпочтут щитам дисплейные панели. Но будут ли любители дисплеев в большинстве, зависит от многого, нам неведомого. Но сейчас речь не об этом.
Каждый, кто может в течение пяти минут поддерживать разговор об электропроводке, сразу скажет мне, что щит состоит из плоских панелей, на которых размещены выключатели и лампочки, а также из ящика со множеством проводов. Ведь лампочка без проводов только для того и годится, чтобы ее или тупо разбить или, если подойти творчески и включить воображение, разместить у самого пытливого во рту и довольно быстро узнать, где находится травмпункт.
Все так и было, куча проводов, уходящих из ящика к выключателям и лампочкам, только лампочки — маленькие. Видимо, внучки знаменитой лампочки Ильича.
И вот, помнится, глянул за окно, а там 21-й век. Стало быть надо все делать заново и по-другому. Вместо лампочек — экономичные светодиоды. Вместо проводов — проводки. Вместо одного ящика — много-много маленьких ящичков, контроллеров, стало быть.
Оказалось, что если каждый контроллер сможет обслуживать четыре светодиода и два переключателя то это будет выглядеть оптимальненько. В смысле, не так ужасающе. А если через все контроллеры будет проходить шина питания и информационная шина, всего четыре провода, то появится некое изящество. Оказалось также, что контроллеров потребуется 104 штуки. По-хорошему, тут надо было бы поставить и решить задачу коммивояжера. И тогда, возможно, контроллеров потратили бы меньше. Но было не до хорошего.
К тому времени я уже знал, что такое CAN и уровень моего уважения к фирме Bosch был много выше, нежели у повара приличного ресторана или аккуратной домохозяйки. А производители автомобилей BMW, я уверен, даже ходили к инженерам Bosch в гости.
Controller Area Network, как сказали бы иностранцы, на мой взгляд, как техническое решение, возникло из желания сделать что-то, наконец, хорошо. Не скрою, все прелести результатов работы инженеров почувствуешь не сразу, как осилишь два тома стандарта, а значительно позже. Когда пообщаешься с очевидцами, опросишь свидетелей. Сейчас томов прибавилось, но, может быть, можно сразу начинать с третьего, поскольку, теперь оно называется CAN_FD. Однако, позвольте продолжить.
Еще до столкновения со щитом мне пришлось столкнуться с чужими инженерными решениями на тему использования CAN, а также наделать и своих ошибок. Ошибки обычно появляются в перерывах между чтением инструкций и изучением описаний. Хорошо, что только со второго раза они выглядят как грабли.
Теперь несколько тысяч слов для читателя, который терпимо относится к занудам и не считает их врагами.
CAN можно установить там, где раньше работал RS485 на витой паре. Витая пара — это не непременное условие, просто удобно сравнивать. Используя витую пару, по CAN, как и по RS485, можно передать сообщения от управляющего контроллера к подчиненному и получить ответ. Сходство бросается в глаза, но, давайте лучше остановимся на отличиях. Кое-какие из отличий могут нести знак минус для некоторых из читателей. Но им бы я посоветовал не огорчаться, а вспомнить закон Ломоносова.
Благодаря синхронной организации протокола разрешение коллизий на шине реализовано аппаратно, на лету, так сказать. Ниже отмечено, к чему это приводит и что это дает непоседливому инженеру.
Можно получить сообщение и без запроса.
Не надо ждать, когда ответ будет готов, можно спросить в это время еще кого-то.
Подчиненный контроллер тоже может спросить и получить ответ.
Из-за синхронной работы длина шины CAN обратно пропорциональна скорости передачи или типа того.
Максимальная скорость составляет 1 Мбод (10 — на подходе).
То, что сообщение не исказилось при передаче отправляющий знает сразу после последнего бита. Точнее, это знают все на шине.
Если сообщение исказилось для одного, попытка не засчитывается всеми.
Если сообщение удалось передать в шину, то абонент не получит его лишь при условии, что сломался.
Количество контроллеров на шине не должно превышать 127.
Сообщения ограничены по длине. Они состоят из идентификатора, указателя длины в байтах и блока данных, именно с таким количеством байт, как указано. Есть еще несколько служебных битов, но о них пока помолчим, поскольку сервис должен быть ненавязчивым. Идентификатор может быть размером 11 или 29 бит. Блок данных может содержать от 0 до 8 байт (64 — на подходе).
Для конкретики приведу немного цифр. Если хочется работать на скорости 1Мбод, то длина шины не должна быть больше 35 метров (некоторые предпочитают 40, то есть, погорячее). Если необходимо передать что-то на расстояние до 8 км, то скорость не должна превышать 5 Кбод. Кстати, читатель вправе спросить, почему килобод, а не килобит? Потому, что не все боды становятся битами. Как-то так.
Как можно распорядиться всеми этими совсем не секретными ингредиентами? Те, кто во всем видят игру в кубики, сразу вспомнят, что есть такая замечательная вещь, как CANopen и еще много красивых сочетаний и аббревиатур и нечего изобретать велосипед. Таким мне часто хочется ответить: «Разве не похожа на велосипед та яичница из двух яиц, которую многие готовят себе на завтрак? Почему бы не сходить в общепит и не взять себе омлет?». Но я лучше промолчу и продолжу, не отвлекаясь на выкрики из зала.
В те времена, когда 29 битовый идентификатора еще не успели придумать, существовал только 11 битовый. Одни его стали использовать, чтобы запихнуть туда название (номер) нужного вида данных. Другие использовали как адрес контроллера, к которому обращаются. И то и другое имело смысл. Например, можно спросить так:
- А подай-ка нам, милейший, шато тринадцатого года в литровой бумажной упаковке.
Заверните мне, пожалуйста, то, что спрятано у вас на самой нижней полке справа.
Кстати, в CAN может сработать и такая конструкция:
Всем лежать! А ты быстро складывай все с полок мне в сумку.
Но этой конструкцией часто не попользуешься, поскольку после придется какое-то время ждать.
Ждать пока все ответы не выстроятся один за другим и не поступят в распоряжение запрашивающего контроллера. Мы уже ушли от кино, если что.
Меня в моем случае устроил бы вариант идентификатора в качестве адреса. Из 11 бит требовалось 7 и еще 4 оставалось на то, чтобы сделать одни сообщения более срочными по сравнению с другими, а также пометить часть контроллеров как главные.
Некоторое неудобство перекочевало сюда из RS485, а именно, адреса надо было устанавливать вручную на каждом контроллере. Затем проверять и переустанавливать. И, возможно, вернуться к предыдущему шагу и повторить.
К счастью, к тому времени уже существовали два обстоятельства.
Читайте также: Volvo 850 размер шин
Первое — уже появился 29 битный идентификатор. А второе то, что многие производители микроконтроллеров стали считать хорошим тоном условие, чтобы каждый чип имел свой уникальный и довольно длинный номер.
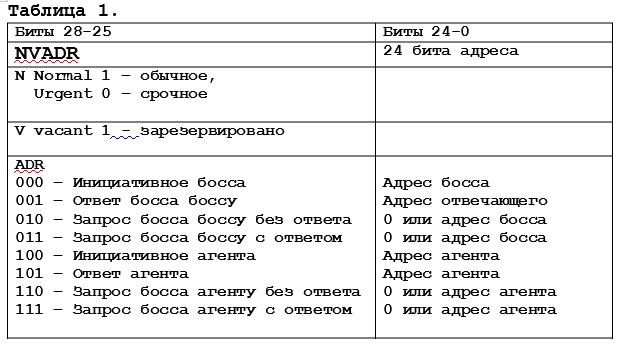
Теперь в длинном идентификаторе можно было 24 бита смело отвести для уникального адреса. Еще 5 оставалось, для заботы о том, чтобы поезда различались срочностью, направлением (туда, обратно), наличием вагона-ресторана и вагонов с повышенным комфортом.
Если перестать дурачиться и сделаться серьезным, назвать подчиненных контроллеров агентами, а остальных боссами, то можно составить таблицу. Она будет показана немного позже.
Еще немного про адресацию. Уникальный номер чипа, как правило, занимает количество битов значительно превышающее 24, например, 96 у STM32FXXX. Поэтому необходимо как-то получить 24 из 96. Я выбрал операцию XOR. Вы можете выбрать что-то другое, но небольшая проблема останется. Это совпадения адресов после редуцирования.
Вероятность появления этой проблемы крайне мала, но она есть. Она решаема, но добавляет работы наладчикам. Здесь надо вспомнить, что сообщения CAN могут не содержать данных совсем. Это нам и пригодиться при решении. Оно состоит из следующих действий.
Управляющий контроллер (босс) отправляет широковещательный запрос, на который должны ответить все агенты (это запрос с нулевым адресом). Ответные сообщения с нулевой длиной данных и совпадающими адресами не испортят друг-друга, а достигнут босса в виде одного.
Теперь останется подсчитать сколько получено ответов и сколько их должно быть. Если эти два числа совпадают, значит все в порядке. Если ответов меньше чем контроллеров, то налицо совпадение адресов и наладчикам есть работа. А если ответов больше, нежели контроллеров, то надо подумать о диссертации, поскольку, вы — на пороге открытия.
Если изменение длины сообщения рассматривать как некоторые вариации его смысла, то можно получить дополнительные возможности, о которых позже расскажу, если мама не позовет кушать.
Еще из интересного, если использовать и короткие и длинные идентификаторы одновременно, то можно получить, например, адресацию групп или частично широковещательные запросы. Но не будем пока углубляться.
Вернемся к кодированию идентификатора.
Для целей адресации в расширенном идентификаторе отведено 24 бита, а в стандартном – шесть. Адрес со значением 0x000000 является широковещательным для расширенного идентификатора. Для стандартного идентификатора нулевой адрес (6 его бит) также считается широковещательным. Пять начальных (старших) битов в длинном и коротком идентификаторе, называются заголовком, влияют на смысл сообщения и обозначаются буквами NVADR:
Конечно, для диспетчерского щита потребовалось реализовать только часть этой схемы. В первом проекте со щитом (или на щите, как правильно?) использовались чипы Cortex от NXP, а в следующих проектах (были и такие) уже применялись M0 от STMicroelectronics.
Пару слов об использовании коротких идентификаторов. Те шесть бит, которые отводятся для адресации, адресуют не контроллер, а группу. Эта группа при старте сначала у всех нулевая. Далее производится конфигурирование агентов, после которого часть из них или все становятся принадлежащими своей группе. Теперь запросом к группе, мы получаем ответы тех агентов, которые мы собрали в эту группу.
Теперь, немного о том, что добавляется, если по-разному трактовать сообщения с различной длиной данных. Например, запрос с нулевой длиной хорошо помогает при отладке, как уже упоминалось выше. Запрос с длиной 3 обслуживает пространство байтовых переменных размером 16384. Запрос с длиной 4 делает то же самое, но предназначен для агента-шлюза, который обслуживает CAN шину второго уровня. Эта шина может состоять из одного-двух агентов, зато удаленных на пару километров.
Запрос с длиной 5 и 6, аналогично, предназначены для пространства двухбайтовых переменных размером 4194304. Два бита используются не для адресации. Один бит управляет записью-чтением. Другой сигнализирует об ошибке.
Далее 7 и 8 обслуживают четырех байтовые слова. Их тоже 4194304.
Эти пространства являются общими для всех агентов. Каждый из них, в зависимости от предназначения, использует только отрезок пространства переменных. Контроллер для измерения температуры в двух точках представлен на фото. Это для отладки и тестирования.
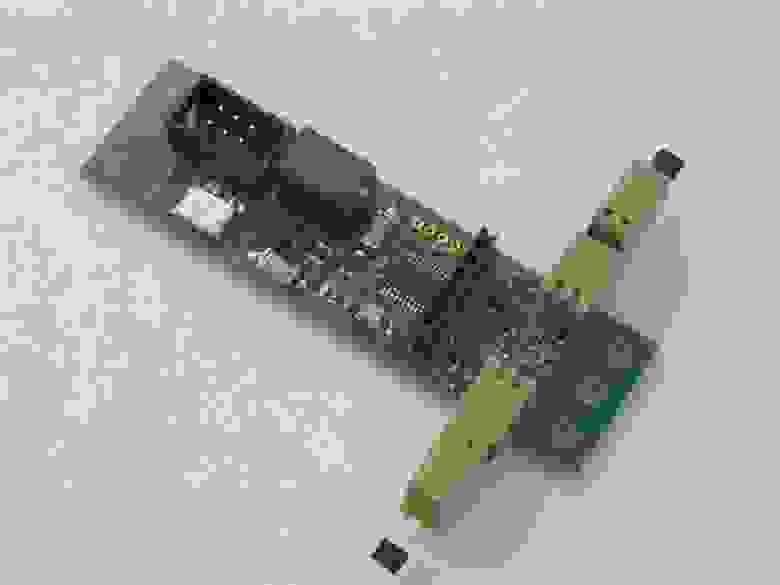
Соединяются контроллеры плоским шлейфом на 6 жил. На питание идут сдвоенные. Микросхема о двадцати ногах — это STM32F042.
С обратной стороны присутствует MAX3051, формирователь CAN в корпусе SOT23-8.
Ну вот, мама кушать зовет.
- RS-485: все еще самый надежный промышленный интерфейс
- Сравнение интерфейсов RS-485 и RS-422
- RS-485 – самый популярный промышленный интерфейс
- Проблемы, связанные с использованием последовательного интерфейса в промышленной среде
- Защита систем передачи данных от неблагоприятных внешних воздействий
- Усиленная защита от ЭСР
- Защита от перенапряжений
- Устойчивость приемников к неопределенным состояниям линии
- Возможность «горячей» замены
- Заключение
RS-485: все еще самый надежный промышленный интерфейс


В условиях промышленного применения беспроводные линии передачи данных никогда не смогут полностью заменить проводные. Среди последних самым распространенным и надежным до сих пор остается последовательный интерфейс RS-485. А производителем наиболее защищенных от внешних воздействий и разнообразных по конфигурации и степени интеграции приемопередатчиков для него, в свою очередь, остается компания Maxim Integrated.
Несмотря на рост популярности беспроводных сетей, наиболее надежную и устойчивую связь, особенно в жестких условиях эксплуатации, обеспечивают проводные. Правильно спроектированные проводные сети позволяют реализовать эффективную связь в промышленных приложениях и в системах автоматизированного управления производственными процессами, обеспечивая устойчивость к помехам, электростатическим разрядам и перенапряжениям. Отличительные особенности интерфейса RS-485 обусловили его широкое применение в индустрии.
Сравнение интерфейсов RS-485 и RS-422
Приемопередатчик RS-485 является наиболее распространенным интерфейсом физического уровня для реализации сетей с последовательной передачей данных, предназначенных для жестких условий эксплуатации в промышленных применениях и в системах автоматизированного управления зданиями. Данный стандарт последовательного интерфейса обеспечивает обмен данными с высокой скоростью на сравнительно большое расстояние по одной дифференциальной линии (витой паре). Основная проблема применения RS-485 в промышленности и в системах автоматизированного управления зданиями состоит в том, что электрические переходные процессы, возникающие при быстрой коммутации индуктивных нагрузок, электростатические разряды, а также импульсные перенапряжения, воздействуя на сети автоматизированных систем управления, способны исказить передаваемые данные или привести к выходу их из строя.
В настоящее время существует несколько типов интерфейсов передачи данных, каждый из которых разработан для конкретных применений с учетом требуемого набора параметров и структуры протокола. К числу интерфейсов последовательной передачи данных относятся CAN, RS-232, RS-485/RS-422, I 2 C, I 2 S, LIN, SPI и SMBus, однако RS-485 и RS-422 по-прежнему остаются наиболее надежными, особенно в жестких условиях эксплуатации.
Интерфейсы RS-485 и RS-422 во многом схожи, однако имеют некоторые существенные отличия, которые необходимо учитывать при проектировании систем передачи данных. В соответствии со стандартом TIA/EIA-422, интерфейс RS-422 специфицирован для промышленных применений с одним ведущим устройством шины данных, к которой может быть подключено до 10 ведомых устройств (рисунок 1). Он обеспечивает передачу на скорости до 10 Мбит/с, используя витую пару, что позволяет повысить помехоустойчивость и достичь максимально возможной дальности и скорости передачи данных. Типичные области применения RS-422 – автоматизация производственных процессов (производство химикатов, пищевое производство, бумажные фабрики), комплексная автоматизация производства (автомобильная и металлообрабатывающая промышленность), системы вентиляции и кондиционирования, системы безопасности, управление двигателями и контроль за перемещением объектов.
Читайте также: Шины колесо в митино
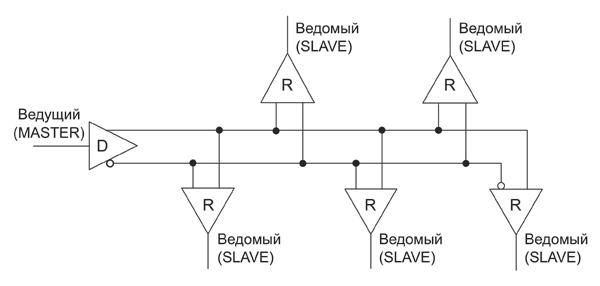
Рис. 1. Интерфейс RS-422 с подключением нескольких приемных устройств к общей двухпроводной линии связи
RS-485 обеспечивает более высокую гибкость благодаря возможности использования нескольких ведущих устройств на общей шине, а также увеличения максимального числа устройств на шине с 10 до 32. Согласно стандарту TIA/EIA-485, интерфейс RS-485 по сравнению с RS-422 имеет более широкий диапазон синфазного напряжения (-7…12 В вместо ±7В) и несколько меньший диапазон дифференциального напряжения (±1,5 В вместо ±2 В), что обеспечивает достаточный уровень сигнала приемника при максимальной нагрузке линии. Используя расширенные возможности многоточечной шины данных, можно создавать сети устройств, подключенных к одному последовательному порту RS-485. Благодаря высокой помехоустойчивости и возможности многоточечных подключений RS-485 является наилучшим среди последовательных интерфейсов для использования в промышленных распределенных системах, подключаемых к программируемому логическому контроллеру (PLC), графическому контроллеру (HMI) или другим контроллерам для сбора данных. Поскольку RS-485 является расширенным вариантом RS-422, все устройства RS-422 могут подключаться к шине, управляемой ведущим устройством RS-485. Типичные области применения для RS-485 аналогичны перечисленным выше областям применения RS-422, при этом более частое использование RS-485 объясняется его расширенными возможностями.
RS-485 – самый популярный промышленный интерфейс
Стандарт TIA/EIA-485 допускает использование RS-485 на расстоянии до 1200 м. На более коротких дистанциях скорости передачи данных – более 40 Мбит/с. Использование дифференциального сигнала обеспечивает интерфейсу RS-485 более высокую дальность, однако скорость передачи данных уменьшается по мере увеличения длины линии. На скорость передачи данных влияет также площадь сечения проводов линии и число устройств, подключенных к ней. При необходимости получения одновременно большой дальности и высокой скорости передачи данных рекомендуется использовать приемопередатчики RS-485 со встроенной функцией высокочастотной коррекции, например, MAX3291. Интерфейс RS-485 может использоваться в полудуплексном режиме с применением одной витой пары проводов или в дуплексном режиме с одновременными передачей и приемом данных, что обеспечивается использованием двух витых пар (четыре провода). В многоточечной конфигурации в полудуплексном режиме RS-485 способен поддерживать до 32 передатчиков и до 32 приемников. Однако микросхемы приемопередатчиков нового поколения имеют более высокий входной импеданс, что позволяет снизить нагрузку приемника на линию от 1/4 до 1/8 стандартного значения. Например, при использовании приемопередатчика MAX13448E число приемников, подключаемых к шине RS-485, может быть увеличено до 256. Благодаря расширенному многоточечному интерфейсу RS-485 имеется возможность построения сетей различных устройств, подключенных к одному последовательному порту, как показано на рисунке 2.
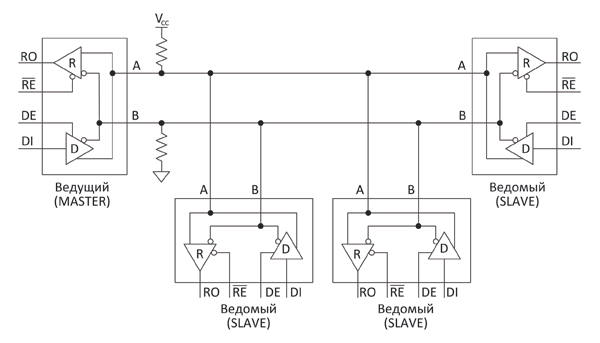
Рис. 2. Многоточечная полудуплексная приемопередающая система, используемая в промышленных приложениях
Чувствительность приемника составляет ±200 мВ. Следовательно, для распознавания одного бита данных уровни сигнала в точке подключения приемника должны быть больше +200 мВ для нуля и меньше -200 мВ для единицы (рисунок 3). При этом приемник будет подавлять помехи, уровень которых находится в диапазоне ±200 мВ. Дифференциальная линия обеспечивает также эффективное подавление синфазных помех. Минимальное входное сопротивление приемника составляет 12 кОм, выходное напряжение передатчика находится в диапазоне ± 1,5…± 5 В.
Рис. 3. Минимальные уровни сигналов в линии RS-485
Проблемы, связанные с использованием последовательного интерфейса в промышленной среде
Разработчики промышленных систем сталкиваются со сложными задачами по обеспечению их надежной эксплуатации в электромагнитной обстановке, способной вывести из строя оборудование или нарушить работу цифровых систем передачи данных. Одним из примеров подобных систем является автоматическое управление технологическим оборудованием на автоматизированном промышленном предприятии. Контроллер, управляющий процессом, измеряет его параметры, а также параметры окружающей среды, и передает команды исполнительным устройствам либо формирует аварийные оповещения. Промышленные контроллеры представляют собой, как правило, микропроцессорные устройства, архитектура которых оптимизирована для решения задач данного промышленного предприятия. Линии передачи данных топологии «точка-точка» в таких системах подвержены сильным электромагнитным помехам от воздействия окружающей среды.
Преобразователи постоянного напряжения, используемые в промышленном производстве, работают с высокими входными напряжениями и обеспечивают изолированные от входа напряжения для питания нагрузки. Для питания устройств распределенной системы, не имеющих собственного сетевого источника питания, используются напряжения 24 или 48 В DC. Питание оконечной нагрузки осуществляется напряжением 12 или 5 В, полученным путем преобразования входного напряжения. Системам, обеспечивающим связь с удаленными датчиками или исполнительными устройствами, требуется защита от переходных процессов, электромагнитных помех и разности потенциалов земли.
Многие компании, такие как Maxim Integrated, прилагают большие усилия, чтобы интегральные микросхемы для промышленных применений отличались высокой надежностью и устойчивостью к неблагоприятной электромагнитной обстановке. Приемопередатчики RS-485 производства компании Maxim содержат встроенные цепи защиты от высоковольтных электростатических разрядов и импульсных перенапряжений и обладают возможностью «горячей» замены без потери данных в линии.
Защита систем передачи данных от неблагоприятных внешних воздействий
Усиленная защита от ЭСР
Электростатический разряд (ЭСР) возникает при соприкосновении двух противоположно заряженных материалов, вследствие чего происходит перенос статических зарядов и формируется искровой разряд. ЭСР часто возникает при контакте людей с окружающими предметами. Искровые разряды, возникающие при небрежном обращении с полупроводниковыми приборами, могут существенно ухудшить их характеристики или привести к полному разрушению полупроводниковой структуры. ЭСР может возникнуть, например, при замене кабеля или простом прикосновении к порту ввода-вывода и привести к отключению порта вследствие выхода из строя одной или нескольких микросхем интерфейса (рисунок 4).
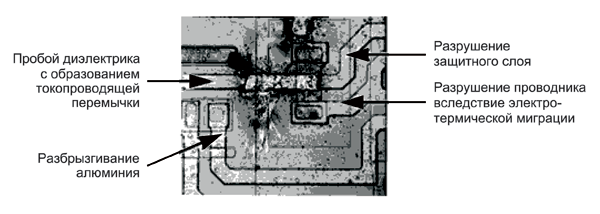
Рис. 4. Результат воздействия электростатического разряда на кристалл микросхемы с недостаточным уровнем защиты
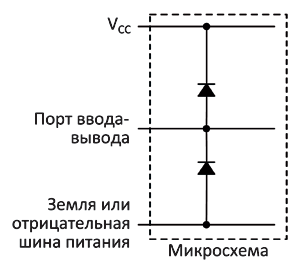
Рис. 5. Упрощенная схема встроенной цепи защиты порта ввода-вывода от ЭСР
Подобные аварии могут приводить к значительным убыткам, так как повышают стоимость гарантийного ремонта и воспринимаются потребителями как следствие низкого качества продукта. В промышленном производстве ЭСР представляет собой серьезную проблему, способную причинить убытки в миллиарды долларов ежегодно. В реальных условиях эксплуатации ЭСР может привести к отказу отдельных компонентов, а иногда и системы в целом. Для защиты интерфейсов передачи данных могут использоваться внешние диоды, однако некоторые интерфейсные микросхемы содержат встроенные компоненты защиты от ЭСР и не требуют дополнительных внешних цепей защиты. На рисунке 5 показана упрощенная функциональная схема типовой встроенной цепи защиты от ЭСР. Импульсные помехи в сигнальной линии ограничиваются диодной схемой защиты на уровнях напряжения питания VCC и земли и, таким образом, защищают внутреннюю часть схемы от повреждений. Производимые в настоящее время микросхемы интерфейсов и аналоговые коммутаторы со встроенной защитой от ЭСР в основном соответствуют стандарту МЭК (IEC) 61000-4-2.
Компания Maxim Integrated инвестировала значительные средства в разработку микросхем с надежной встроенной защитой от ЭСР и в настоящее время занимает лидирующие позиции в производстве приемопередатчиков интерфейсов от RS-232 до RS-485. Данные устройства выдерживают воздействие испытательных импульсов ЭСР, соответствующих МЭК (IEC) 61000-4-2 и JEDEC JS-001, непосредственно на порты ввода-вывода. Решения компании Maxim в области защиты от ЭСР отличаются надежностью, доступностью, отсутствием дополнительных внешних компонентов и меньшей стоимостью по сравнению с большинством аналогов. Все микросхемы интерфейсов производства этой компании содержат встроенные элементы, обеспечивающие защиту каждого вывода от ЭСР, возникающих в процессе производства и эксплуатации. Приемопередатчики семейства MAX3483AE/MAX3485AE обеспечивают защиту выходов передатчиков и входов приемников от воздействия высоковольтных импульсов амплитудой до ±20 кВ. При этом сохраняется нормальный режим работы изделий, не требуется выключения и повторного включения питания. Кроме того, встроенные элементы защиты от ЭСР обеспечивают функционирование при включении и выключении питания, а также в дежурном режиме с низким энергопотреблением.
Читайте также: Гусеница из шин сделай сам
Защита от перенапряжений
В промышленных применениях входы и выходы драйверов RS-485 подвержены сбоям, возникающим в результате импульсных перенапряжений. Параметры импульсных перенапряжений отличаются от ЭСР – в то время как длительность ЭСР обычно находится в диапазоне до 100 нс, длительность импульсных перенапряжений может составлять 200 мкс и более. Причинами возникновения перенапряжений могут быть ошибки проводного монтажа, плохие контакты, поврежденные или неисправные кабели, а также капли припоя, которые могут образовывать токопроводящее соединение между силовыми и сигнальными линиями на печатной плате или в разъеме. Поскольку в промышленных системах электропитания используются напряжения, превышающие 24 В, воздействие таких напряжений на стандартные приемопередатчики RS-485, не имеющие защиты от перенапряжений, приведет к их выходу из строя в течение нескольких минут или даже секунд. Для защиты от импульсных перенапряжений обычные микросхемы интерфейса RS-485 требуют дорогостоящих внешних устройств, выполненных на дискретных компонентах. Приемопередатчики RS-485 со встроенной защитой от перенапряжений способны выдерживать синфазные помехи в линии передачи данных до ±40, ±60 и ±80 В. Компания Maxim производит линейку приемопередатчиков RS-485/RS-422 MAX13442E…MAX13444E, устойчивых к постоянным напряжениям на входах и выходах до ±80 В относительно земли. Элементы защиты функционируют независимо от текущего состояния микросхемы, – включена ли она, выключена или находится в дежурном режиме, – что позволяет характеризовать данные приемопередатчики как наиболее надежные в отрасли, идеально подходящие для промышленных применений. Приемопередатчики производства компании Maxim сохраняют работоспособность при перенапряжениях, обусловленных замыканием силовых и сигнальных линий, ошибками проводного монтажа, неправильным подключением разъемов, дефектами кабелей и неправильной эксплуатацией.
Устойчивость приемников к неопределенным состояниям линии
Важной характеристикой микросхем интерфейса RS-485 является невосприимчивость приемников к неопределенным состояниям линии, что гарантирует установку высокого логического уровня на выходе приемника при разомкнутых или замкнутых входах, а также при переходе всех передатчиков, подключенных к линии, в неактивный режим (высокоимпедансное состояние выходов). Проблема корректного восприятия приемником сигналов замкнутой линии данных решается путем смещения порогов входного сигнала до отрицательных напряжений -50 и -200 мВ. Если входное дифференциальное напряжение приемника VA – VB больше или равно -50 мВ – на выходе R0 устанавливается высокий уровень. Если VA – VB меньше или равно -200 мВ – на выходе R0 устанавливается низкий уровень. При переходе всех передатчиков в неактивное состояние и наличии в линии оконечной нагрузки дифференциальное входное напряжение приемника близко к нулю, вследствие чего на выходе приемника устанавливается высокий уровень. При этом запас помехоустойчивости по входу составляет 50 мВ. В отличие от приемопередатчиков предыдущего поколения, пороги -50 и -200 мВ соответствуют значениям ±200 мВ, установленным стандартом EIA/TIA-485.
Возможность «горячей» замены
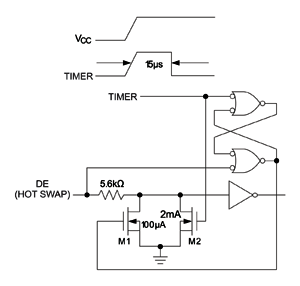
Рис. 6. Упрощенная структурная схема защиты входа DE при горячей замене
Схема с «горячей» заменой исключает появление ложных импульсов в линии передачи данных при инициализации интерфейсного устройства или подключения его к объединительной панели. Схемы ограничения тока короткого замыкания и отключения по перегреву защищают приемопередатчик от чрезмерно большой рассеиваемой мощности. Горячая замена плат приемопередатчиков может вызвать нежелательные переходные процессы на линиях DE, DE/RE, RE и входах приемников A и B, которые могут привести к ошибкам в передаче данных. Например, при первоначальной установке платы процессор выполняет операции запуска по включению питания. В этом интервале времени выходы передатчика находятся в высокоимпедансном состоянии, что не позволяет им установить детерминированные уровни сигналов на входе приемника. В то же время ток утечки высокоимпедансного выхода на уровне 10 мкА или паразитная емкостная связь с цепями питания или земли могут создать напряжение смещения на входе приемника, которое будет воспринято им как неверное логическое состояние. Микросхемы приемопередатчиков MAX3440E/MAX3443E содержат встроенную схему удержания постоянных уровней линий DE, DE/RE и RE при «горячей» замене. При нарастании напряжения питания VCC внутренняя схема смещает уровень сигнала DE к земле (к напряжению питания для линии RE) и удерживает его не менее 10 мкс до тех пор, пока втекающий ток DE превышает 200 мкА. После этапа первоначального запуска по включению питания схема удержания уровней отключается и пропускает сигнал напрямую. Структурная схема защиты входов при горячей замене на примере входа DE показана на рисунке 6.
Во входной цепи разрешения работы приемопередатчика (DE) имеется два N-канальных МОП-транзистора – M1 и M2. При подаче питания VCC внутренний таймер на 15 мкс открывает транзистор M2 и устанавливает RS-триггер, который открывает также M1. Транзисторы M2 и M1 с токовыми стоками 2 мА и 100 мкА соответственно, смещают потенциал DE к земле через резистор 5,6 кОм. Транзистор M2 способен удерживать вывод DE в отключенном состоянии при внешней паразитной емкости до 100 пФ. По истечении 15 мкс таймер закрывает M2, а M1 остается открытым, удерживая низкий уровень DE, что препятствует смещению потенциала DE к высокому уровню вследствие токов утечки высокоимпедансных выходов передатчиков. M1 остается включенным до тех пор, пока ток внешнего источник тока не превысит требуемый входной ток. В этот момент RS-триггер сбрасывается и закрывает M1, при этом DE становится стандартным высокоомным КМОП-входом. При уменьшении VCC ниже 1 В вход отключается. Комплиментарная схема входа RE использует два P-канальных МОП-транзистора для смещения уровня RE к потенциалу VCC.
Заключение
Промышленные системы, в частности, автоматизированные производства, функционируют в условиях неблагоприятной электромагнитной обстановки, поэтому разработчику системного уровня необходимо учитывать наличие паразитных напряжений, возникающих при переходных процессах, и разрабатывать оборудование, устойчивое к внешним воздействиям. В большинстве сетей передачи данных используется наиболее надежный из последовательных интерфейсов – RS-485. Современные микросхемы приемопередатчиков RS-485 содержат встроенные элементы, реализующие усиленную защиту от электростатического разряда, защиту от перенапряжений и возможность горячей замены, что предохраняет микросхемы интерфейса RS-485 от неблагоприятных внешних воздействий, поддерживая тем самым высокую надежность системы передачи данных.
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле