
Интерфейс CAN (Controller Area Network – сеть контроллеров) – стандарт промышленной сети, ориентированный на объединение в единую сеть различных исполнительных устройств и датчиков, был разработан компанией Robert Bosch GmbH для автомобильной автоматики в середине 1980-х. В настоящее время этот стандарт широко применяется в промышленной автоматизации, технологиях «умного дома», автомобильной промышленности, в корабельных бортовых сетях, управлении системами кондиционирования воздуха, лифтами, медицинскими и промышленными установками. В мире уже установлено более 100 млн. узлов сетей CAN, ежегодный прирост составляет более 50%.
Непосредственно стандарт CAN от Bosch определяет передачу без привязки к физическому способу передачи данных, т.е. он может быть каким угодно, например, радиоканалом или оптоволокном. Но на практике под CAN-сетью (рис. 1) обычно подразумевается сеть с физическим уровнем в виде общей и единой дифференциальной пары (ISO 11898). При максимальной скорости передачи, оговоренной стандартом, (1 Мбит/с) длина шины может достигать 30 м. При меньших скоростях ее можно увеличить до нескольких километров (на скорости 10 кБит/с – длина шины до 5 км). Если требуется большая длина, то ставятся мосты или повторители. Теоретически число подсоединяемых к шине устройств не ограничено ничем, а практически не превышает 64. В большинстве применений этой цифры вполне достаточно.
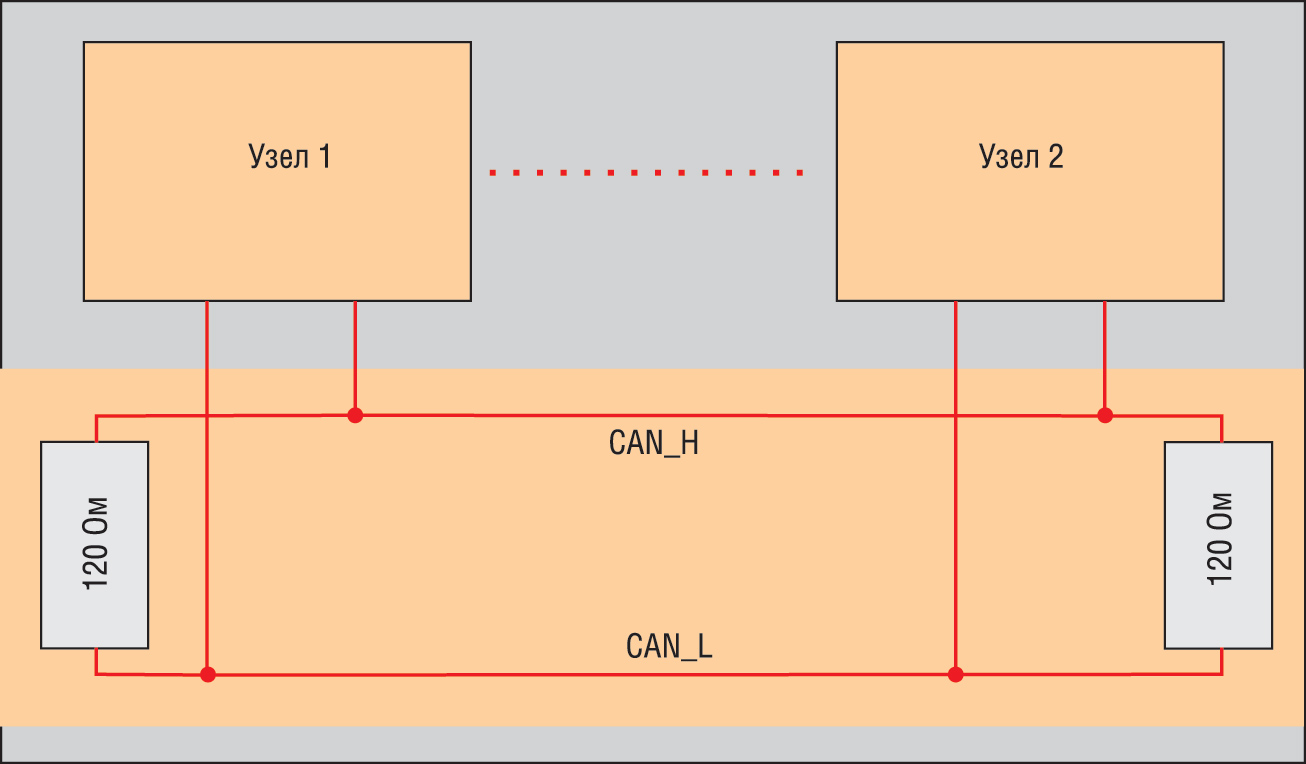
Рис. 1. Физическая топология шины CAN
Шина CAN является мультимастерной, т. е. сразу несколько устройств могут управлять ею. Передача ведется кадрами, которые принимаются абсолютно всеми узлами сети. Шина CAN является синхронной шиной, которая в отличие от сетей типа Ethernet и им подобных (точка-точка) обеспечивает доступ на передачу сообщения детерминировано (т.е. приоритетно), что особо ценно для промышленных сетей управления (fieldbus). Коллизии и ошибки, возникающие на шине CAN, однозначно детектируются всеми узлами сети: узлы с зафиксированной ошибкой попросту отключаются от сети. Описание стандартов и большой объем документации по шине CAN бесплатно доступен на сайте организации CAN in Automation www.can-cia.de.
Каждый узел сети CAN состоит как минимум из трех основных частей: приемопередатчик физического уровня сети (в дальнейшем трансивер), контроллер пакетов сети, процессор или микроконтроллер, определяющий функциональное назначение самого узла. Зачастую сам контроллер CAN входит в состав процессора/микроконтроллера. Однако трансивер в виде отдельной микросхемы является необходимостью. Объясняется это, прежде всего, высокими требованиями к его надежности и рабочим характеристикам, поскольку работает он с цепями, физически выходящими за пределы устройства (в данном случае это сама шина CAN). А условия, в которых находятся эти цепи, зачастую не определены: например, сильные магнитные поля или пролегающие рядом силовые высоковольтные цепи. Более того, при необходимости гальванической развязки ее удобнее всего осуществлять именно между трансивером и контроллером CAN-сети.
Читайте также: Авто шины в ялте
Максимальное число узлов, подключенных к шине, фактически определяется нагрузочной способностью примененных трансиверов. Например, при использовании PCA82C250 от компании NXP (данная микросхема была разработана еще Philips Semiconductors) она равна 110.
Значительно возросшие требования к современным микросхемам по надежности, температуре, экономичности и другим параметрам касаются также и трансиверов сетей CAN. Ниже приведен обзор трансиверов трех производителей: NXP, Texas Instruments и Maxim.
CAN-трансиверы NXP
Высокоскоростные CAN-трансиверы компании NXP TJA1040, TJA1041, TJA1050 (табл. 1) основаны на продвинутой технологии SOI – кремний на изоляторе (Silicon-on-Insulator). Благодаря этой технологии новые трансиверы в сравнении с трансиверами предыдущего поколения PCA82C250 и PCA82C251 имеют уменьшенный уровень собственного электромагнитного излучения (20 дБ) и высокую устойчивость к электромагнитному излучению.
Таблица 1. Краткие параметры и характеристики микросхем CAN-трансиверов NXP
| Наименование | Диапазон напряжения питания, В | Максимально допустимое напряжение на шине CAN, В | Максимальная скорость передачи, кбит/с | Ток потребления в экономичном режиме, мкА | Диапазон рабочей температуры, °С | Корпус |
|---|---|---|---|---|---|---|
| PCA82C250T/N4 | 4,50…5,50 | -36…+36 | 1000 | 250 | -40…125 | SOIC-8 |
| PCA82C251/N3 | 4,50…5,50 | -36…+36 | 1000 | 250 | SOT97-1 | |
| PCA82C251T/N3 | 4,50…5,50 | -36…+36 | 1000 | 250 | SOIC-8 | |
| TJA1040T/N1 | 4,75…5,25 | -27…+40 | 1000 | 15 | SOIC-8 | |
| TJA1040T/V | 4,75…5,25 | -27…+40 | 1000 | 15 | SOIC-8 | |
| TJA1041AT | 4,75…5,25 | -27…+40 | 1000 | 10 | SOIC-14 | |
| TJA1041T/N1 | 4,75…5,25 | -27…+40 | 1000 | 10 | SOIC-14 | |
| TJA1050T/N1 | 4,75…5,25 | -27…+40 | 1000 | – | SOIC-8 | |
| TJA1050U/N1 | 4,75…5,25 | -27…+40 | 1000 | – | SOIC-8 | |
| TJA1054T/N3 | 4,75…5,25 | -40…+40 | 125 | 10 | SOIC-14 | |
| TJA1054AT/N4 | 4,75…5,25 | 27…+40 | 125 | 10 | SOIC-14 | |
| TJA1055T/N3 | 4,75…5,25 | -58…+58 | 125 | 5 | SOIC-14 |
Трансивер TJA1040 имеет режим Standby с удаленным запуском по шине и потреблением тока менее 15 мкА. Трансивер рекомендован для работы в составе устройств, постоянно подключенных к питанию. Кроме того, TJA1040 при отключении питания становится невидим для шины, что делает его пригодным также для применений в узлах автоэлектроники типа clamp-15, когда при выключенном зажигании другие узлы общаются по CAN-шине.
TJA1041 имеет несколько особенностей в сравнении с TJA1040: спящий режим с потреблением тока узла не более 20 мкА; удаленный запуск по шине и локальный запуск через специальный вывод, что позволяет определить источник запуска; уникальные возможности диагностики и информирования об отказах шины: информирование о коротких замыканиях, включая «скрытые»; информирование о локальных сбоях. Благодаря этим свойствам TJA1041 имеет очень гибкую систему управления собственным потребляемым током.
TJA1050 имеет схожие с TJA1040 характеристики, но при отключенном питании во время общения других устройств отдает в шину обратный ток (TJA1040 имеет нулевой обратный ток). Обратный ток немного увеличивает электромагнитное излучение шины. Поэтому если требования к электромагнитной совместимости не очень жесткие, но необходима минимизация цены устройства, рекомендуется применять TJA1050 (TJA1050 на 20-30% дешевле, чем TJA1040).
Читайте также: Размеры шин сузуки свифт
Помимо высокоскоростных трансиверов, компания NXP выпускает приемопередатчики TJA1054 и TJA1054A стандарта FT-CAN (FT – Fault-tolerant, т.е. помехозащищенный). Они идентичны высокоскоростным трансиверам TJA1040/41/50, но обладают повышенной помехозащищенностью.
TJA1054 является, можно сказать, «образцовым» устройством: по нему фактически писался стандарт ISO11898-3 (FT-CAN). Особенности: спящий режим, потребление всего узла 30 мкА; великолепные параметры ЭМС благодаря технологии SOI; уникальные дополнительные функции отказоустойчивости (аналогичные TJA1041); нулевой обратный ток;
TJA1054A – версия TJA1054 с улучшенной защитой от электростатического разряда. Другие ососбенности: защита до 4 кВ в модели человеческого тела по выводам CANH, CANL, RTH, RTL (по сравнению с 2 кВ в TJA1054). Остальные технические параметры идентичны TJA1054, устройство полностью соответствует ISO11898-3 и рекомендуется как FT-CAN-трансивер в новых разработках.
TJA1055 — усовершенствованная версия трансиверов TJA1054 и TJA1054A со следующими основными отличиями: улучшенная защита от электростатических разрядов, уменьшенный ток потребления в спящем режиме, совместимость с 3 В логикой.
Компания NXP также выпускает специальный трансивер AU5790, работающий с однопроводной шиной CAN. Этот 1W-CAN-приемопередатчик (1W – однопроводной) был специально разработан для узкого сегмента рынка с требованиями минимальной стоимости реализации шины,. Основные параметры AU5790: скорость передачи данных до 40 кбит/с; скорость приема данных до 100 кбит/с; инновационные функции экономии энергии; уникальные функции запуска, позволяющие осуществлять коммуникацию двух устройств без запуска всех шины; спящий режим с потреблением 70 мкА; функция защиты от потери земли; поддержка до 32 узлов.
Будучи в свое время флагманом в области CAN-трансиверов и CAN-контроллеров, предшественник NXP компания Philips Semiconductors успела довольно прочно занять этот рынок. Другие компании взяли за основу своих разработок изделия Philips и занялись их усовершенствованием и улучшением характеристик и параметров, с сохранением расположения выводов и корпусов микросхем. Этим путем пошли, например, компании Texas Instruments и Maxim.
CAN-трансиверы Texas Instruments
Как было сказано выше, CAN-трансиверы Texas Instruments (табл. 2) являются улучшенными образцами распространенных трансиверов серий PCA82C25x, TJA10xx от PHILIPS.
Таблица 2. Краткие параметры и характеристики микросхем CAN-трансиверов Texas Instruments
| Наименование | Диапазон напряжения питания, В | Максимально допустимое напряжение на шине CAN, В | Максимальная скорость передачи, кбит/с | Ток потребления в экономичном режиме, мкА | Диапазон рабочей температуры, °С | Корпус |
|---|---|---|---|---|---|---|
| SN65HVD230 | 3,0…3,6 | -4…+16 | 1000 | 370 | -40…85 | SOIC-8 |
| SN65HVD231 | 100 | |||||
| SN65HVD232 | – | |||||
| SN65HVD230M-EP | 3,0…3,6 | -4…+16 | 1000 | 370 | -50…125 | SOIC-8 |
| SN65HVD230Q | 3,0…3,6 | -4…+16 | 1000 | 370 | -40…125 | SOIC-8 |
| SN65HVD231Q | 100 | |||||
| SN65HVD232Q | – | |||||
| SN65HVD1040 | 4,75…5,25 | -27…+40 | 1000 | 5 | -40…125 | SOIC-8 |
| SN65HVD1050 | – | -40…125 | ||||
| SN65HVD1050-EP | – | -55…125 | ||||
| SN65LBC031 | 4,50…5,50 | -5…+20 | 500 | – | -40…85 | SOIC-8 DIP-8 |
| SN65LBC031Q | -40…125 | |||||
| SN75LBC031 |
Серия трансиверов SN65HD23x/SN65HD23xQ является полностью совместимой по выводам/корпусу и улучшенной копией популярного трансивера NXP – PCA82C250: повышенная экономичность, напряжение питания 3,3 В, расширенный диапазон рабочей температуры, спящий режим со сверхнизким током потребления 0,1 мкА (SN65HD231/SN65HD231Q).
Читайте также: Пропускная способность шины процессора что это такое
SN65HVD1040/1050/1050-EP в свою очередь являются аналогами соответствующих трансиверов NXP – TJA1040/1050, но с улучшенными параметрами: защита до 12 кВ в модели человеческого тела по выводам шины CAN относительно земли (по сравнению с 4 кВ в TJA1050); уменьшенный с 30 мкА (TJA1050) до 5 мкА ток потребления в ждущем режиме; автоматическое пробуждение из ждущего режима по факту приема данных по шине; расширенный диапазон рабочей температуры в отрицательной области (-55°С у SN65HVD1050-EP против -40°С у TJA1040/1050).
CAN-трансиверы Maxim
CAN-трансиверы Maxim (табл. 3) отличаются от соответствующих микросхем других компаний прежде всего возможностью работы на более высокой скорости – до 2 Мбит/с; повышенным максимально допустимым напряжением на шине (до +/-80 В); повышенной экономичностью, т.е. сверхнизким собственным током потребления (35 мкА при доминантном уровне на выходе шины и 2 мкА при рецессивном); дополнительной защитой по току выходных транзисторов. Разумеется, компания Maxim не стала отходить от традиции – все микросхемы CAN-трансиверов совместимы с изделиями конкурентов как по выводам, так и по корпусам, в которых она размещены. Основная область их применения – индустриальная.
Таблица 3. Краткие параметры и характеристики микросхем CAN-трансиверов MAXIM
| Наименование | Диапазон напряжения питания, В | Максимально допустимое напряжение на шине CAN, В | Максимальная скорость передачи, кбит/с | Ток потребления в экономичном режиме, мкА | Диапазон рабочей температуры, °С | Корпус |
|---|---|---|---|---|---|---|
| MAX3050 | 4,50…5,50 | -80…+80 | 2000 | 15 | -40…125 | SOIC-8 |
| MAX3057 | ||||||
| MAX3051 | 3,10…3,45 | -7,5…+12,5 | 1000 | 1 | -40…85 | SOIC-8 SOT23-8 |
| MAX3053 | 4,50…5,50 | -80…+80 | 2000 | 15 | -40…85 (E) -40…125 (A) | SOIC-8 |
| MAX3054 | 4,75…5,25 | -80…+80 | 250 | 3 | -40…125 | SOIC-14 |
| MAX3055 | ||||||
| MAX3056 | ||||||
| MAX3058 | 4,50…5,50 | -7,5…+12,5 | 1000 | 15 | -40…125 | SOIC-8 |
| MAX3059 | 10 | |||||
| MAX13050 | 4,75…5,25 | -80…+80 | 1000 | 11 | -40…85 (E) -40…125 (A) | SOIC-8 |
| MAX13052 | ||||||
| MAX13053 | ||||||
| MAX13054 | 4,75…5,25 и 3,00…3,60 | |||||
| MAX13051 | 4,75…5,25 | -80…+80 | 1000 | 15 | -40…85 (E) -40…125 (A) | SOIC-8 |
MAX3054/55/56 – это усовершенствованные трансиверы TJA1054 (NXP): увеличенная надежность, благодаря высокому допустимому напряжению на шине CAN (до +/-80 В); уменьшенный уровень ВЧ-помех (встроенные фильтры) и повышенная устойчивость к внешним электромагнитным полям благодаря встроенному узлу управления скоростью нарастания напряжения на шине CAN. Они идеальны для работы на скоростях 40 кБит/с (MAX3056), 125 кБит/с (MAX3055) и 250 кБит/с (MAX3054).
Заключение
Жесткая конкурентная борьба применительно к трансиверам CAN-сетей выглядит так: каждая компания старается сделать полностью совместимый с конкурентом/конкурентами трансивер по выводам и по корпусу, но с улучшенными характеристиками: ток потребления, скорость работы, уровень излучаемых помех и, наконец, цена. На примере трех компаний – NXP, TI и MAXIM – это особенно заметно.
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле