
Пытаюсь настроить АВТОЗАПУСК.
Модуль 2Can-2lin записана прошивка 5.2.2
Выбран автомобиль : Toyota fielder RHD (кнопка старт стоп) 2007-2012
В настройках выбраны галочки : педаль тормоза ,паркинг ,контроль работы двигателя ,зажигание, двери, багажник,
поддержка функции «Slave» , дополнительная функция Slave , дополнительная функция (тройная нажатие кнопки закрыть ), Slave по багажнику, Управление аварийной сигнализацией , управление ЦЗ , отпирание багажника ,
функция комфорт, управление штатной системы охраны , запуск двигателя , блокировка двигателя , обход штатного иммобилайзера .
Обходчик иммобилайзера не прописан , процедуру знаю еще не пробовал.
таблицу SF программировал на кнопку старт стоп , коробку автомат .
В итоге находясь в салоне авто активирую функцию автозапуска , сигнализация включает зажигание , но зеленого огонька нет на кнопке старт стоп , ожидание секунд десять , зажигание выключается .
Вопрос : Где я ошибся в настройках программирования или в подключениях , нужно ли подключать к педали тормоза какой проводок или нет ? Нужно ли подключать силовой блок к стартеру ? И должен ли загорется при нормальном подключении автозапуска на кнопке старт стоп зеленый светодиод? Чтобы завести авто надо нажать на педаль тормоза , модуль 2can-2lin должен обойти , или проводок надо бросать от сигнализации ?
Ответы 18
а Вы вообще понимаете что делаете. Как она у Вас заведется без процедуры обучения. Причем тут программировали как кнопку старт стоп. Или вы просто не глядя по карте ничего не проверяя и не понимая принципа работы авто, алгоритма безключевого обхода тупо лепите?! Может пожалеете машину? Отдадите специалисту или хотя бы тому кто хоть что то понимает?
Спасибо за дельный совет , пройду процедуру обучения отпишусь .
По кан шине сейчас авто открывает закрывает все замки , открывает заднюю дверь , видит все двери , через приложение в смартфоне я вижу свое авто , его температуру , пробег авто тоже вижу .Все работает помогите с автозапуском ув. Феникс рас вы так назвались вы должны счастье приносить а не быть указателем на (специалиста).
1.Как мне понять как работает ваша сигнализация по кан шине если вы не положили даже инструкции как ее соединять правильно с авто и как она работает какие провода используются обходчиком а какие штатной сигналкой ?
У вас в схеме подключения CAN шины разхождение , если взять схему подключения А93 А63 вертикальный брелок
то нужно подключать коричневый , коричнево красный , серый и серо красный .
Если взять вашу схему со страницы https://can.starline.ru/19/39/7321 для моего авто то нужно подключать только коричневый и коричнево красный .
2.Вопрос куда подключать, должны ли они между собой соединяться?
3.Я подключил только коричневый и коричнево красный( по схеме с вашего сайтаhttps://can.starline.ru/19/39/7321), для обходчика этого достаточно или нет ?
Я прошел процедуру обучения иммобилайзера сейчас авто при закрытых дверях включает зажигание , светодиод на кнопке старт стоп вообще никакой не горит , через секунд 10 гасит зажигание , четыре раза закрывает двери ,и пробует еще раз .
4.Вопрос сигнализация напрямую должна с силового блока управлять стартером или эта функция управляется по кан шине ?
У меня к вам 4 не сложных вопроса , будте добры ответить на каждый из них .
Плюс стартера от сигнализации подключите.

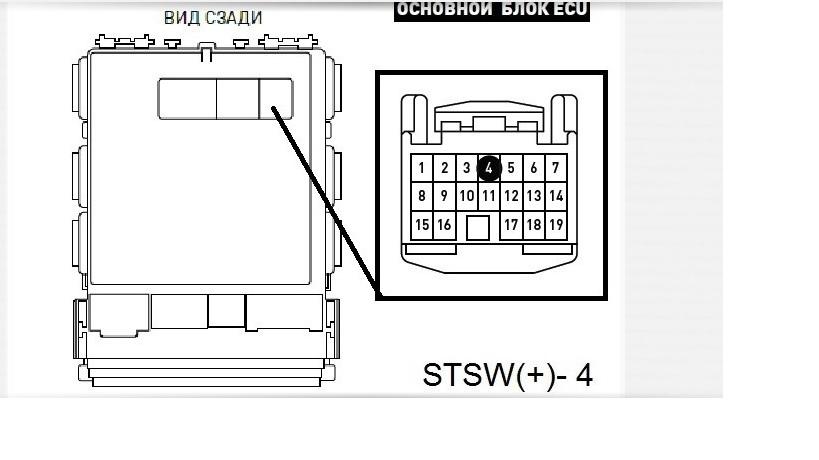
Вот этот блок и этот разьем , четвертый пин это земля , если на нее подать +12 будет замыкание , еще предложения есть?

ты еблан ,сигу в лобаш кинь и все заработает,криворукий мудак
Как я понял нужно найти провод STSW и на него подавать плюс с сигналки при включении и выключении , так ?
Вот этот блок и этот разьем , четвертый пин это земля , если на нее подать +12 будет замыкание , еще предложения есть?
А Вам всё равно — где разъемы выдергивать?
На черный провод в указанном разъеме точно ничего подавать не надо! Кстати — это скорее всего не совсем масса, а это. РУЧНИК. Если он у Вас на момент замера был поднят, то на проводе будет масса. При опущенном ручнике там скорее всего будет что-то другое.
Наш коллега tviktor ВИД СЗАДИ монтажного блока привел. Да, туда добраться НЕПРОСТО будет, но.
А Вы выдернули разъем НА ЛИЦЕВОЙ стороне блока. Он не трехрядный, а двух рядный и провода STR+ (STSW+) в нем нет.
Во всяком случае проверить это просто (придется 8 раз запустить машину). Вертаем разъем на место. Втыкаем плюс вольтметра (нужны щупы с иголками) в верхнее левое гнездо этого разъема — где есть провод. Минус вольтметра на массу. Жмем кн. Start машины. Вольтметр должен показать кратковременный всплеск напряжения (на секунду-полторы-две) от нуля до 12 вольт. Всплеска нет или напруга поднялась до 12 и не падает (или показывает вообще что-то другое, без привязки к запуску мотора)? Это не провод CTAРT точно. Глушим машину, переставляем щуп-иголку в следующее гнездо разъема, где есть провод и повторяем эсперимент. Проверили все провода и искомого так и не нашли — значит не там искали.
В этом разъеме единственное что есть из полезного — это КОНЦЕВИК двери ВОДИТЕЛЯ — коричневый — третий слева в верхнем ряду.
Отодвигаем сиденье пассажира назад до максимума, ложимся на спину, засунув голову под торпедо под монтажный блок, чтобы увидеть ЗАДНЮЮ стенку блока (наличие подсветки приветствуется). Выдергиваем крайнюю фишку вверху, которая ближе к левому борту машины. В ней средний ПИН в верхнем ряду — СТАРТЕР+.
Задача упрощается. если СНЯТЬ ПОЛНОСТЬЮ верхушку торпедо — она съемная. Тогда до задней стенки и вожделенному разъему на верхней кромке задней стенки блока можно будет добраться СВЕРХУ. ДЛя съема торпедо надо снять накладки стоек , открутить креперж подушки безопасности, расцепить её разъем, разобрать центральную консоль с извлечением верхней вставки по центру торпедо, вытащить приборную доску, снять боковины торпедо и выкрутить ряд саморезов по передней кромке верха торпедо и в недрах проема приборной доски.
Кстати — не исключено. что на этой машине можно сделать обход иммо С МЯГКОЙ ПОСАДКОЙ, но делать его надо пытаться по IMO-IMI для ключной COROLLA
А цепи IG1 IG2 START искать в сборке разъемов над монтажным блоком (эта сборка становится доступной после снятия верха торпедо). Но это уже совсем другая история.
Как я понял нужно найти провод STSW и на него подавать плюс с сигналки при включении и выключении , так?
Нет не так. Подавать + надо только ПРИ ПУСКЕ. То есть в настройках таблицы SF надо будет всё запрограммировать как для КЛЮЧНОЙ машины. Иначе при глушении мотора сигналка что будет делать? (если запрограммировать всё, как для кнопочной машины)
Правильно — ЧИРКАТЬ СТАРТЕРОМ. Ведь она будет на черно-желтый выдавать ИМПУЛЬС ГЛУШЕНИЯ. А в нашей ситуации это не надо. Надо только зажигание выключить ПРИ ОКОНЧАНИИ ЗАПУСКА. А это сигнализация сделает по CAN, как и включение питания этих цепей в начале запуска.
Когда найдете нужный разъем — постарайтесь УБЕДИТЬСЯ,что нашли нужный провод. К нему подключите вольтметр и убедитесь, что сигнал на нем ведет себя так как надо — при пуске мотора там кратковременно появляется +12.
Читайте также: Ширина шины системной платы 64 бит что это
Спасибо за пинок в нужном направлении !
Да особо не за что. Если Вы не занимаетесь этим (я про установки сигнализаций) каждый день, то непросто вот так с кондачка всё и сразу понять и сделать верно (тем более — в кнопочной машине с запуском по CAN). Молодец, что не торопитесь цеплять сразу и наобум, а проверяете цепи — я о черном проводе НЕ В ТОМ РАЗЪЕМЕ.
Не забудьте поделиться радостью, когда всё получится.
Получается что STSW это слаботочный плюс на реле стартера , так ?
SF я настраивал как кнопка старт стоп .Подключил мощное реле на стартер через черно желтый провод , автозапуск у меня получался но как-то коряво , на пуске стартер долго крутил , и при глушении авто сигналка заводила двигатель стартером но потом отключала зажигание и двигатель глох . не понятно почему долго крутил стартер если в кан модуле выставлено контроль двигателя по оборотам.
Получается Starline a93 2can-2lin плохо подходит для моего авто, раз нельзя ее настроить как кнопка старт стоп ?
Я не пойму если у меня авто с кнопкой старт стоп если я запрограммирую сигналку под ключ, каким образом сигналка поймет что надо включить зажигание прежде чем клацать стартером ,и как она по кану выключит зажигание на конец прогрева?
imo/imi на сигнализации Starline a93 2can-2lin что то я не нашел.
Настроил как для ключной машины и все заработало .
Заводит как надо , глушит тоже .
Мягкую посадку это наверное доп оборудование надо ?
Получается Starline a93 2can-2lin плохо подходит для моего авто, раз нельзя ее настроить как кнопка старт стоп ?
А93 идеально подходит для любых машин, если всё грамотно подключать и настраивить под сделанные подключения. Раз вы делаете ЗАПУСК по CAN, то это ближе к запуску, как на КЛЮЧНОЙ машине и алгоритмы пуска, соответствующие КНОПОЧНОЙ машине (имитация нажатия тормоза, имитация нажатия кнопки START) уже не подходят.
Но если БЫ Вы стали БЫ делать КЛАССИЧЕСКИЙ запуск «по кнопке» (с «похоронами» одной из меток или дописанного в мозг машины ЧИПа в ЧИПово-ключном обходчике), то тогда БЫ Вам БЫ надо было БЫ делать те самые подключения ИМИТАЦИИ педали ТОРМОЗА и цепи запуска на кнопке START.
И тогда настройки были бы под кнопочную машину. Но не слишком ли много «БЫ»? Вы же захотели БЕСКЛЮЧЕВОЙ ОБХОД, который куда безопаснее с точки зрения возможного угона и куда надежнее в мороз (цифрение в шину вряд-ли замерзнет, как это иногда бывает с ЧИПом и вряд-ли ухудшится трансляция из-за неверного расположения петель в схеме передачи поля ЧИПа к кнопке, так как этого всего просто нет у Вас сейчас — ПРИ БЕСКЛЮЧЕВОМ цифровом обходе иммо).
Я не пойму если у меня авто с кнопкой старт стоп если я запрограммирую сигналку под ключ, каким образом сигналка поймет что надо включить зажигание прежде чем клацать стартером ,и как она по кану выключит зажигание на конец прогрева?
Но ведь понимает ЖЕ? Раз у Вас
Настроил как для ключной машины и все заработало .
Заводит как надо , глушит тоже.
Просто она УМНАЯ и раз Вы воткнули ей на спину CAN-модуль, да еще выбрали в нем код автомобиля с ЗАПУСКОМ по CAN, то она и выдает в шину CAN коды включения АСС и зАЖИГАНИЯ, но к сожалению не может выдать код СТАРТЕРА и его надо выдать АНАЛОГОВЫМ способом. Но нам не надо чтобы стартер включался ПРИ ГЛУШЕНИИ. Значит надо так и попросить сигналку — «выдай пожалуйста на черно-желтый ИМПУЛЬС ТОЛЬКО ПРИ ПУСКЕ». А это только в алгоритме КЛЮЧНОЙ МАШИНЫ. В алгоритме кнопочной машины она будет выдавать и импульс ПРИ ГЛУШЕНИИ — она же будет КНОПКУ ЖАТЬ. Посмотрите на осциллограмы с обратной стороны плаката с таблицами. Там всё есть.
Мягкую посадку это наверное доп оборудование надо ?
Не надо, но надо еще больше разбирать машину, переделывать подключения сигнализации, заливать в CAN адаптер код совсем другой машины и СТАВИТЬ ЭКСПЕРИМЕНТ. Мне бы было интересно. Вам этим лучше не заморачиваться. Тем более, что
imo/imi на сигнализации Starline a93 2can-2lin что то я не нашел.
Раз не нашли, то и искать не стОит.
А то одно сломать у Вас получится без проблем, но получится-ли сделать другое без ошибок, чтобы у этого другого был шанс заработать? А ведь МОЖЕТ И НЕ ЗАРАБОТАТЬ, даже если всё верно сделать. Ведь это же не совсем для Вашей машины схема. К тому же ПОЯВЛЯЕТСЯ риск угона ЗАСКОКОМ при наличии мягкой посадки у ключного автомобиля. Ведь для покатушек на таком авто, если он уже заведен внос метки-транспондера (SMART-ключа) в салон не требуется. Машина без проблем поедет и без SMARTа (читай — без владельца автомобиля).
А вот если захотите сделать ЕВРОсвет (инфа есть по ссылке), то Вам достаточно одного канала и первой последовательности его настройки.
Так как мягкой посадки у Вас нет, то второй канал (и вторая последовательность настроек для него) Вам не нужны. Достаточно подключить один канал.
Меня все устраивает , главное чтоб авто имело возможность прогреться. Всем участникам СПАСИБО!
И особая благодарность тебе Старик , за терпение и объяснения новичку .
14.32 Цифровая шина данных CAN
Обмен данными по шине CAN
На автомобиле применены несколько сетевых шин обмена данными CAN (Controller Area Network) между блоками (модулями) управления различных систем и контроллерами исполнительных устройств автомобиля.
Отдельные блоки управления объединены друг с другом в общую сеть и могут обмениваться данными.
Шина является двунаправленной, т.е. любое подключённое к ней устройство может принимать и передавать сообщения.
Сигнал с чувствительного элемента (датчика) поступает в ближайший блок управления, который обрабатывает его и передаёт на шину данных CAN.
Любой блок управления, подключённый к шине данных CAN, может считывать этот сигнал, вычислять на его основе значение управляющего воздействия и управлять исполнительным сервомеханизмом.
При обычном кабельном соединении электрических и электронных устройств осуществляется прямое соединение каждого блока управления со всеми датчиками и исполнительными элементами, от которых он получает результаты измерений или которыми управляет.
Усложнение системы управления приводит к чрезмерной длине или многочисленности кабельных линий.
По сравнению со стандартной кабельной разводкой шина данных обеспечивает:
· Уменьшение количества кабелей. Провода от датчиков тянутся только к ближайшему блоку управления, который преобразует измеренные значения в пакет данных и передаёт его в шину CAN.
· Управлять исполнительным механизмом может любой блок управления, который по шине CAN получает соответствующий пакет данных, и на его основе рассчитывает значение управляющего воздействия на сервомеханизм.
· Улучшение электромагнитной совместимости.
· Уменьшение количества штекерных соединений и уменьшение количества контактных выводов на блоках управления.
· Снижение веса.
· Уменьшение количества датчиков, т.к. сигналы одного датчика (например, с датчика температуры охлаждающей жидкости) могут быть использованы различными системами.
· Улучшение возможностей диагностирования. Т.к. сигналы одного датчика (например, сигнал скорости) используются различными системами, то в случае, если сообщение о неисправности выдают все использующие данный сигнал системы, неисправным является, как правило, датчик или блок управления, обрабатывающий его сигналы. Если же сообщение о неисправности поступает только от одной системы, хотя данный сигнал используется и другими системами, то причина неисправности, чаще всего, заключена в обрабатывающем блоке управления или сервомеханизме.
· Высокая скорость передачи данных – возможна до 1Мбит/с при максимальной длине линии 40 м. В настоящее время на а/м Mercedes-Benz скорость передачи данных составляет от 83 Кбит/с до 500 Кбит/с.
· Несколько сообщений могут поочерёдно передаваться по одной и той же линии.
Шина данных CAN состоит из двужильного провода, выполненного в виде витой пары. К этой линии подключены все устройства (блоки управления устройствами).
Передача данных осуществляется с дублированием по обоим проводам, причём логические уровни шины данных имеют зеркальное отображение (то есть, если по одному проводу передаётся уровень логического нуля (0), то по другому проводу передаётся уровень логической единицы (1), и наоборот).
Двухпроводная схема передачи используется по двум причинам: для выявления ошибок и как основа надёжности.
Если пик напряжения возникает только на одном проводе (например, вследствие проблем с ЭМС (электромагнитная совместимость)), то блоки-приёмники могут идентифицировать это как ошибку и проигнорировать этот пик напряжения.
Если же произойдёт короткое замыкание или обрыв одного из двух проводов шины данных CAN, то благодаря интегрированной программно-аппаратной системе надёжности произойдёт переключение в режим работы по однопроводной схеме. Повреждённая передающая линия использоваться не будет.
Порядок и формат передаваемых и принимаемых пользователями (абонентами) сообщений определён в протоколе обмена данными.
Существенным отличительным признаком шины данных CAN по сравнению с другими шинными системами, базирующимися на принципе абонентской адресации, является соотнесённая с сообщением адресация.
Это значит, что каждому сообщению по шине данных CAN присваивается его постоянный адрес (идентификатор), маркирующий содержание этого сообщения (например: температура охлаждающей жидкости). Протокол шины данных CAN допускает передачу до 2048 различных сообщений, причём адреса с 2033 по 2048 являются постоянно закреплёнными.
Объём данных в одном сообщении по шине данных CAN составляет 8 байт.
Блок-приёмник обрабатывает только те сообщения (пакеты данных), которые сохранены в его списке принимаемых по шине данных CAN сообщений (контроль приемлемости).
Пакеты данных могут передаваться только в том случае, если шина данных CAN свободна (т.е., если после последнего пакета данных последовал интервал в 3 бита, и никакой из блоков управления не начинает передавать сообщение).
При этом логический уровень шины данных должен быть рецессивным (логическая «1»).
Если несколько блоков управления одновременно начинают передавать сообщения, то вступает в силу принцип приоритетности, согласно которому сообщение по шине данных CAN с наивысшим приоритетом будет передаваться первым без потери времени или битов (арбитраж запросов доступа к общей шине данных).
Каждый блок управления, утрачивающий право арбитража, автоматически переключается на приём и повторяет попытку отправить своё сообщение, как только шина данных CAN снова освободится.
Кроме пакетов данных существует также пакет запроса определённого сообщения по шине данных CAN.
В этом случае блок управления, который может предоставить запрашиваемый пакет данных, реагирует на данный запрос.
В обычном режиме передачи пакеты данных имеют следующие конфигурации блоков (фреймы):
• Data Frame (фрейм сообщения) для передачи сообщений по шине данных CAN (напр.: температура охлаждающей жидкости).
• Remote Frame (фрейм запроса) для запроса сообщений по шине данных CAN от другого блока управления.
• Error Frame (фрейм ошибки) все подключённые блоки управления уведомляются о том, что возникла ошибка и последнее сообщение по шине данных CAN является недействительным.
Протокол шины данных CAN поддерживает два различных формата фреймов сообщения по шине данных CAN, которые различаются только по длине идентификатора:
— стандартный формат;
— расширенный формат.
В настоящее время DaimlerChrysler использует только стандартный формат.
Пакет данных для передачи сообщений по шине данных CAN состоит из семи последовательных полей:
• Start of Frame (стартовый бит): Маркирует начало сообщения и синхронизирует все модули.
• Arbitration Field (идентификатор и запрос): Это поле состоит из идентификатора (адреса) в 11 бит и 1 контрольного бита (Remote Transmission Request-Bit). Этот контрольный бит маркирует пакет как Data Frame (фрейм сообщения) или как Remote Frame (фрейм запроса) без байтов данных.
• Control Field (управляющие биты): Поле управления (6 бит) содержит IDE-бит (Identifier Extension Bit) для распознавания стандартного и расширенного формата, резервный бит для последующих расширений и — в последних 4 битах — количество байтов данных, заложенных в Data Field (поле данных).
• Data Field (данные): Поле данных может содержать от 0 до 8 байт данных. Сообщение по шине данных CAN длиной 0 байт используется для синхронизации распределённых процессов.
• CRC Field (контрольное поле): Поле CRC (Cyclic-Redundancy-Check Field) содержит 16 бит и служит для контрольного распознавания ошибок при передаче.
• ACK Field (подтверждение приёма): Поле ACK (Acknowledgement Field) содержит сигнал подтверждения приёма всех блоков-приёмников, получивших сообщение по шине CAN без ошибок.
• End of Frame (конец фрейма): Маркирует конец пакета данных.
• Intermission (интервал): Интервал между двумя пакетами данных. Интервал должен составлять не менее 3 битов. После этого любой блок управления может передавать следующий пакет данных.
• IDLE (режим покоя): Если ни один блок управления не передаёт сообщений, то шина CAN остаётся в режиме покоя до передачи следующего пакета данных.
Для обработки данных в режиме реального времени должна быть обеспечена возможность их быстрой передачи.
Это предполагает не только наличие линии с высокой физической скоростью передачи данных, но и требует также оперативного предоставления доступа к общей шине CAN, если нескольким блокам управления необходимо одновременно передать сообщения.
С целью разграничения передаваемых по шине данных CAN сообщений по степени срочности, для отдельных сообщений предусмотрены различные приоритеты.
Угол опережения зажигания, например, имеет высший приоритет, значения пробуксовки — средний, а температура наружного воздуха — низший приоритет.
Приоритет, с которым сообщение передаётся по шине CAN, определяется идентификатором (адресом) соответствующего сообщения.
Идентификатор, соответствующий меньшему двоичному числу, имеет более высокий приоритет, и наоборот.
Протокол шины данных CAN основывается на двух логических состояниях: Биты являются или «рецессивными» (логическая «1»), или «доминантными» (логический «0»). Если доминантный бит передаётся как минимум одним модулем, то рецессивные биты, передаваемые другими модулями, перезаписываются.
Если несколько блоков управления одновременно начинают передачу данных, то конфликт доступа к общей шине данных разрешается посредством «побитового арбитража запросов общего ресурса» с помощью соответствующих идентификаторов.
При передаче поля идентификатора блок-передатчик после каждого бита проверяет, обладает ли он ещё правом передачи, или уже другой блок управления передаёт по шине данных CAN сообщение с более высоким приоритетом.
Если передаваемый первым блоком-передатчиком рецессивный бит перезаписывается доминантным битом другого блока-передатчика, то первый блок-передатчик теряет своё право передачи (арбитраж) и становится блоком-приёмником.

Первый блок управления (N I) утрачивает арбитраж с 3-го бита.
Третий блок управления (N III) утрачивает арбитраж с 7-го бита.
Второй блок управления (N II) сохраняет право доступа к шине данных CAN и может передавать своё сообщение.
Другие блоки управления попытаются передать свои сообщения по шине данных CAN только после того, как она снова освободится. При этом право передачи опять будет предоставляться в соответствии с приоритетностью сообщения по шине данных CAN.
Помехи могут приводить к ошибкам в передаче данных. Такие, возникающие при передаче, ошибки следует распознавать и устранять.
Протокол шины данных CAN различает два уровня распознавания ошибок:
· механизмы на уровне Data Frame (фрейм сообщения);
· механизмы на уровне битов.
Механизмы на уровне Data Frame
На основе передаваемого по шине данных CAN сообщения блок-передатчик рассчитывает контрольные биты, которые передаются вместе с пакетом данных в поле «CRC Field» (контрольные суммы). Блок-приёмник заново вычисляет эти контрольные биты на основе принятого по шине данных CAN сообщения и сравнивает их с контрольными битами, полученными вместе с этим сообщением.
Этот механизм проверяет структуру передаваемого блока (фрейма), то есть перепроверяются битовые поля с заданным фиксированным форматом и длина фрейма.
Распознанные функцией Frame Check ошибки маркируются как ошибки формата.
Механизмы на уровне битов
Каждый модуль при передаче сообщения отслеживает логический уровень шины данных CAN и определяет при этом различия между переданным и принятым битом. Благодаря этому обеспечивается надёжное распознавание глобальных и возникающих в блоке-передатчике локальных ошибок по битам.
В каждом пакете данных между полем «Start of Frame» и концом поля «CRC Field» должно быть не более 5 следующих друг за другом битов с одинаковой полярностью.
После каждой последовательности из 5 одинаковых битов блок-передатчик добавляет в поток битов один бит с противоположной полярностью.
Блоки-приёмники удаляют эти биты после приёма сообщения по шине данных CAN.
Если какой-либо модуль шины данных CAN распознаёт ошибку, то он прерывает текущий процесс передачи данных, отправляя сообщение об ошибке. Сообщение об ошибке состоит из 6 доминантных битов.
Благодаря сообщению об ошибке все подключённые к шине данных CAN блоки управления оповещаются о возникшей локальной ошибке и соответственно игнорируют переданное до этого сообщение.
После короткой паузы все блоки управления снова смогут передавать сообщения по шине данных CAN, причём первым опять будет отправлено сообщение с наивысшим приоритетом.
Блок управления, чьё сообщение по шине данных CAN обусловило возникновение ошибки, также начинает повторную передачу своего сообщения (функция Automatic Repeat Request).
Для разных областей управления применяются различные шины CAN. Они отличаются друг от друга скоростью передачи данных.
Скорость передачи по шине данных CAN области «двигатель и ходовая часть» (CAN-C) составляет 125 Кбит/с, а шина данных CAN «Салон» (CAN-B) вследствие меньшего количества особо срочных сообщений рассчитана на скорость передачи данных только 83 Кбит/с.
Обмен данными между двумя шинными системами осуществляется через так называемые «межсетевые шлюзы», т.е. блоки управления, подключённые к обеим шинам данных.
Оптоволоконная шина D2B (Digital Daten-Bus) данных применена для области «Аудио/коммуникации/навигация». Оптоволоконный кабель может передавать существенно больший объём информации, чем шина с медным кабелем.
CAN C — шина «Двигатель и ходовая часть»
В оконечном блоке управления с каждой стороны установлен так называемый согласующий резистор шины данных с сопротивлением 120 Ом, подключённый между обоими проводами шины данных.
Шина данных CAN двигательного отсека активирована только при включённом зажигании.
К шине CAN-С подключено 7 блоков управления.
Некоторые блоки управления, подключённые к шине данных CAN салона, активируются независимо от включения зажигания (например: система единого замка).
Поэтому шина данных CAN салона должна находиться в режиме функциональной готовности даже при выключенном зажигании, это значит, что возможность передачи пакетов данных должна быть обеспечена даже при выключенном зажигании.
С целью максимально возможного снижения потребляемого тока покоя, шина данных CAN, при отсутствии необходимых к передаче пакетов данных, переходит в режим пассивного ожидания, и активируется снова только при следующем доступе к ней.
Если в режиме пассивного ожидания шины данных CAN салона какой-либо блок управления (например, блок управления единого замка) передаёт сообщение по шине данных CAN, то его принимает только главный системный модуль (электронный замок зажигания, EZS). Блок EZS сохраняет это сообщение в памяти и посылает сигнал активации (Wake-up) на все блоки управления, подключённые к шине данных CAN салона.
При активации, EZS проверяет наличие всех пользователей шины данных CAN, после чего передаёт сохранённое до этого в памяти сообщение.
К шине CAN-В подключено 20 блоков управления.
Элементы сети обмена данными (CAN)
Передний блок регистрации и управления с коробкой предохранителей и реле (SAM/SRB-V)
Задний блок регистрации и управления с коробкой предохранителей и реле (SAM/SRB-H)
Блок управления левого сиденья (SSG)
Блок управления правого сиденья (SSG)
Блок управления передней левой двери (TSG)
Блок управления передней правой двери (TSG)
Блок управления задней левой двери (TSG)
Блок управления задней правой двери (TSG)
Блок управления крыши (DBE)
Верхнее поле управления (OBF)
Нижнее поле управления (UBF)
Электронный стартовый выключатель зажигания (EZS)
Система COMMAND/аудио 10/аудио 30/аудио 30 APS
Прибор сцепного устройства прицепа (AAG)
Блок многофункционального управления для специальных моделей (MSS)
Распределитель CAN-B RBA правый
Распределитель CAN-B RBA левый
Распределитель CAN-B Cockpit
Подушки безопасности со встроенной системой вызова ARMINCA
CAN С (Привод и ходовая часть)
Электронное управление коробки передач (EGS или KGS)
Блок управления двигателя (MSG)
Электронный блок селектора передач (EMW)
Распределитель CAN Класс-C RBA левый
Электронная противозаносная система (ESP)
Не включённые в сеть SG
Автоматическая регулировка дальности света (ALWR)
Элементы, подключенные к оптоволоконной шине D2B
D2B (Аудио/Связь/Навигация)
Оптоволоконный кабель
COMMAND/аудио 10/аудио 30/аудио 30 APS
Телефонная система (MINNA, аварийный вызов)
Устройство голосового управления Linguatronic (SBS)
Контроллер мобильного телефона (интерфейс)
Показаны не все
Радиоприёмник или магнитола
Дисплей и блок управления функционирования системы COMAND
Блок управления системы голосового управления
Интерфейс D2B для мобильного/встроенного телефона
Приёмопередатчик сотового телефона (CTEL)/системы аварийного вызова TELE AID
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле
- Правообладателям
- Политика конфиденциальности
Автоподбор © 2023
Информация, опубликованная на сайте, носит исключительно ознакомительный характер