
Именно так выглядит ( в основном) та самая «шина CAN «, с которой в последнее время нам придется сталкиваться все чаще и чаще:

Это обыкновенный двухпроводной кабель получивший название Twisted Pair.
На приведенном фото 1 показаны провода CAN High и CAN Low силового агрегата.
По этим проводам производится обмен данными между блоками управления, они могут нести информацию о скорости автомобиля, скорости вращения коленчатого вала, угле опережения зажигания и так далее.
Обратите внимание, что один из проводов дополнительно помечен черной полоской. Именно таким образом отмечается и визуально определяется провод CAN High (оранжево-черный).
Цвет провода CAN-Low — оранжево-коричневый.
За основной цвет шины CAN принят оранжевый цвет.
На рисунках и чертежах принято изображать цвета проводов шины CAN другими цветами, а именно:
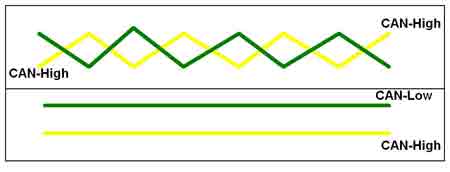
CAN-High — желтым цветом
CAN-Low — зеленым цветом
Всего существует несколько разновидностей шин CAN , определяемых выполняемыми ими функциями:
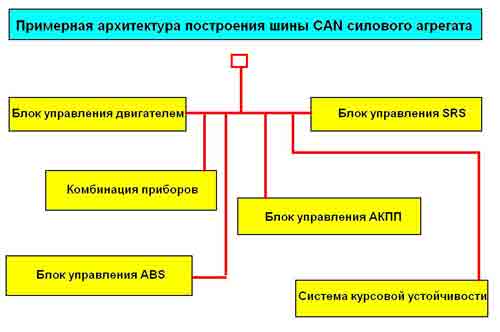
Шина CAN силового агрегата (быст рый канал ) .
Она позволяет передавать информацию со скоростью) 500 кбит/с и служит для связи между блоками управления (двигатель — трансмиссия)
Шина CAN системы «Комфорт» (медле нный канал ) .
Она позволяет передавать информацию со скоростью 100 кбит/с и служит для связи между блоками управления, входящими в систему «Комфорт».
Шина данных CAN информационно — командной системы (медленн ый канал ), позволяющая передавать данные со скоростью 100 kBit/s. Обеспечивает связь между различными обслуживающими системами ( например, телефонной и навигационной системами ) .
Новые модели автомобилей все более становятся похожими на самолеты — по количеству заявленных функций для безопасности, комфорта и экологичности. Блоков управления становится все больше и больше и «тянуть» от каждого грозди проводов — нереально.
Поэтому кроме шины CAN уже существуют другие шины, получившие названия:
– шина LIN (однопроводная шина)
– шина MOST (оптоволоконная шина)
– беспроводная шина Bluetooth
Но не будем «расплываться мыслью по древу», заострим наше внимание пока что на одной конкретной шине: CAN ( по взглядам корпорации BOSCH ).
На примере шины CAN силового агрегата можно посмотреть форму сигнала:

Когда на High шине CAN доминантное состояние, то напряжение проводе повышается до 3.5 вольт.
В рецессивном состоянии напряжение на обоих проводах равняется 2.5 вольта.
Когда на проводе Low доминантное состояние, то напряжение падает до 1.5 вольта.
(«Доминанта» — явление, доминирующее, главенствующее или господствующее в какой-либо сфере,- из словарей).
Для повышения надежности передачи данных, в шине CAN применяется дифференциальный способ передачи сигналов по двум проводам, имеющим название Twisted Pair . А провода, которые образуют эту пару, называются CAN High и CAN Low .
В исходном состоянии шины на обоих проводах поддерживается постоянное напряжение на определенном (базовом) уровне. Для шины CAN силового агрегата оно приблизительно равняется 2.5 вольта.
Такое исходное состояние называется «состоянием покоя» или «рецессивом».
Каким образом передаются и преобразуются сигналы по CAN шине?
Каждый из блоков управления подсоединен к CAN шине посредством отдельного устройства под названием трансивер, в котором имеется приемник сигналов, представляющий собой дифференциальный усилитель, установленный на входе сигналов:
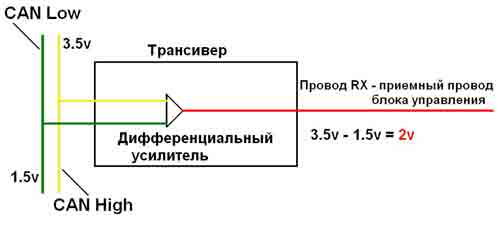
Поступающие по проводам High и Low сигналы, поступают в дифференциальный усилитель, обрабатываются и поступают на вход блока управления.
Эти сигналы представляют собою напряжение на выходе дифференциального усилителя.
Дифференциальный усилитель формирует это выходное напряжение как разность между напряжениями на проводах High и Low шины CAN.
Таким образом исключается влияние величины базового напряжения (у шины CAN силового агрегата оно равно 2,5 В) или какого либо напряжения, вызванного, например, внешними помехами.
Кстати, насчет помех. Как говорят, «шина CAN довольно устойчива к помехам, поэтому она нашла такое широкое применение».
Попробуем разобраться с этим.
Провода шины CAN силового агрегата расположены в моторном отсеке и на них могут воздействовать помехи различного порядка, например, помехи от системы зажигания.
Так как шина CAN состоит из двух проводов, которые перекручены между собой, то помеха одновременно воздействует на два провода:
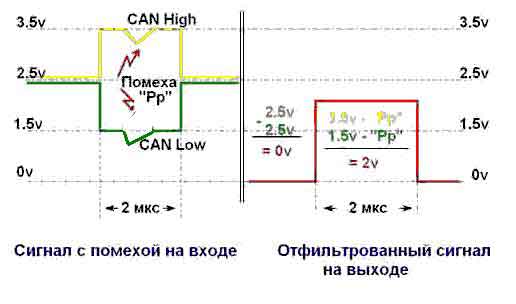
Из вышеприведенного рисунка видно, что происходит далее: в дифференциальном усилителе напряжение на проводе Low (1,5 В – » Pp «) вычитается из напряжения
на проводе High (3,5 В – » Pp «) и в обработанном сигнале помеха отсутствует ( » Pp » — помеха).
Примечание: По наличию времени статья может иметь продолжение — много еще остается «за кадром».
Вас также может заинтересовать:
Шина CAN — это страшно?
- Побеждаем шину CAN. Часть 1. Технология
- Шина CAN
- Контроллеры CANNY
- Визуальное программирование
- Подключение
- Практические примеры
- Режим симуляции
- Заливка в контроллер
- Аналоговые входы
- Заключение по вводной статье цикла
- Изоляция и защита шин интерфейсов CAN и CAN-FD
- Texas Instruments ISO1042 ISO105 SN6505 TPS76350
- Знакомство с CAN
- Необходимость изоляции
- Изоляция
- Защита шины CAN
- Материалы по теме
Побеждаем шину CAN. Часть 1. Технология

Сегодня я хочу познакомить вас с интересной микроконтроллерной платформой CANNY. Это обзорная статья в которой вы узнаете о технологии, а в последующих статьях я расскажу вам о работе с сообщениями CAN, интеграции CANNY c Arduino Mega Server и о тех возможностях, которые предоставляет эта связка.
Читайте также: С каким износом шин можно ездить летом
Почему CANNY? От названия шины CAN, которая широко используется на транспорте и, в частности, во всех современных автомобилях в качестве бортовой сети. Итак, что же можно сделать, имея специализированный контроллер, подключённый к CAN шине вашего автомобиля?
Шина CAN
Образно говоря, шина CAN это нервная система вашего автомобиля. По ней передаётся вся информация о состоянии блоков и систем, а также управляющие команды, которые во многом определяют поведение автомобиля. Зажигание фар, открывание и закрывание дверей, управление проигрыванием музыки в салоне машины, срабатывание сигнализации и т. д. — всё это работает и управляется по этой шине.
Физически, шина CAN представляет собой два перевитых провода и очень проста в монтаже и подключении. Несмотря на свою простоту, она, благодаря своей дифференциальной природе, хорошо защищена от различных наводок и помех. Высокая надежность и большая допустимая длина сети, до 1000 метров, помогла CAN завоевать широкую популярность у производителей различного, не только автомобильного оборудования.
Контроллеры CANNY
Это целое семейство специализированных контроллеров, имеющих встроенную «родную» поддержку работы с шиной CAN. Это касается как «железной» части, так и поддержки на уровне «софта».
Флагманом линейки является контроллер CANNY 7, наиболее мощный и имеющий максимум возможностей. Большое количество памяти, мощные выходы, позволяющие напрямую управлять реле автомобиля, интеллектуальная система защиты от коротких замыканий, защита от бросков тока и напряжения в бортовой сети автомобиля — всё это делает этот контроллер отличным решением для воплощения любых ваших идей и проектов.
Кроме CANNY 7 в линейке контроллеров присутствует ещё несколько моделей, мы будем проводить свои эксперименты с более простой встраиваемой моделью CANNY 5 Nano. Она также поддерживает работу с CAN шиной, но при этом похожа на уже знакомую нам Arduino Nano.
Визуальное программирование
Развитая поддержка шины CAN это не единственная особенность этих контроллеров, кроме этого CANNY имеют свою собственную среду программирования, CannyLab, но не «обычную», а визуальную, где весь процесс написания программ сводится к манипулированию готовыми структурными блоками, заданию их параметров и соединению входов и выходов этих блоков в определённой последовательности, в соответствии с алгоритмом решаемой задачи.
Хорошо это или плохо? На мой взгляд, это дело привычки. Мне, как человеку привыкшему к «традиционному» программированию, было непривычно манипулировать блоками, вместо написания строк кода. С другой стороны, существует множество приверженцев именно такого подхода к составлению алгоритмов и считается, что для инженеров и «не программистов» это наиболее простой и доступный метод программирования микроконтроллеров.
Мне, как минимум, было «прикольно» составлять программы таким образом и через некоторое время мне это стало даже нравиться. Возможно, что если продолжить этим заниматься, то через некоторое время уже написание кода покажется неудобным.
CannyLab является бесплатной средой разработки и вы можете свободно скачать её с сайта разработчиков, она также не требует специальной процедуры инсталляции — достаточно распаковать файл с архивом — и вы можете начинать работу.
Подключение
Подключение CANNY 5 Nano к компьютеру мало чем отличается от подключения контроллеров Arduino. При наличии в системе драйвера Silicon Labs CP210x, либо после его установки из скаченного дистрибутива CannyLab, Windows создаёт виртуальный COM порт и CANNY готов к работе. В моём случае понадобилось ещё перезагрузить компьютер, но возможно это особенность моей системы.
Практические примеры
Давайте на простых примерах разберём, как в CannyLab выполнять действия, привычные нам в Arduino IDE. Начнём с традиционного мигания светодиодом.
В контроллере CANNY 5 на выводе С4 (Channel 4) присутствует тестовый светодиод (аналог светодиода, находящегося на 13 выводе в Arduino). И его тоже можно использовать для индикации и экспериментов, чем мы и воспользуемся.
Что же нужно, чтобы помигать светодиодом в контроллере CANNY? Нужно сделать всего две вещи — сконфигурировать пин четвертого канала как выход и подать на этот выход сигнал с ШИМ генератора. Все эти действия мы уже не раз проделывали в Arduino IDE, посмотрим как это выглядит в CannyLab.
Итак, конфигурируем пин четвертого канала как выход
Настраиваем генератор ШИМ. Задаём период 500 миллисекунд, заполнение — 250 миллисекунд (то есть 50 %) и 1 (true) на входе генератора «Старт» и… всё! Больше ничего делать не нужно — программа готова, осталось только залить её в контроллер.
Режим симуляции
Тут нужно сказать пару слов о процессе симуляции на компьютере работы контроллера и заливке разработанной программы в память «железного» контроллера.
Читайте также: Грузовые шины зимняя резина
Среда разработки CannyLab позволяет запускать и отлаживать программу, не записывая её в память контроллера. В режиме симуляции вы можете видеть результат работы программы прямо в реальном времени и даже вмешиваться в её работу.
Заливка в контроллер
Для работы контроллеров CANNY, перед заливкой программы (в терминологии разработчиков «диаграммы») нужно сначала залить операционную систему «Устройство/Системное ПО/Записать». Это нужно сделать только один раз, для этого нужно выбрать соответствующий вашему контроллеру файл с расширением .ccx.
После того, как программа написана и отлажена, её можно загрузить в ваш контроллер. Это делается просто — в меню выбираете пункт «Устройство/Диаграмма/Записать» и через несколько секунд программа оказывается записанной в контроллер.
Далее нужно отключить контроллер от USB порта компьютера, снять перемычку на плате и можно включать запрограммированный контроллер, который после включения будет работать по вашей программе.
Аналоговые входы
Для того, чтобы лучше понять принцип программирования контроллеров CANNY в среде разработке CannyLab, давайте ещё разберём пример работы с аналоговым входом в этой системе.
Мы будем отслеживать уровень напряжения на 10 пине контроллера и если он находится в диапазоне 2,5 В ± 20%, будем зажигать встроенный в плату светодиод.
Как и в предыдущем примере, конфигурируем 4-й пин как выход для того, чтобы иметь возможность управлять работой светодиода.
Включаем АЦП на 10-м канале.
Далее пользуемся двумя логическими блоками, которые выдают 1 на выход, если напряжение находится в заданном диапазоне. Полный диапазон от 0 до 4095.
Блок «Логическое И» довершает работу и со своего выхода управляет работой светодиода на плате.
Вот и всё. То, что мы привычно делали на Arduino, мы легко сделали в CannyLab. Осталось только освоиться в этой среде программирования и вы сможете легко и непринуждённо создавать свои проекты на этой платформе.
Эти простые примеры составления программ даны для того, чтобы вы могли понять принцип визуального программирования микроконтроллеров CANNY. В дальнейшей работе вам поможет отличная справочная документация и поддержка разработчиков на сайте и форуме системы.
Заключение по вводной статье цикла
Подключив контроллер CANNY к своему автомобилю вы сможете реализовать множество интересных и уникальных идей, например, нестандартную сигнализацию, которую не так то легко будет вскрыть (в силу её нестандартности) или добавите новые функции, о которых мечтали, но не надеялись, что это возможно реализовать на практике.
Если вам нравится визуальное программирование в стиле CannyLab, то контроллеры CANNY могут стать для вас интересной альтернативой Arduino или работать в связке с контроллерами Arduino. Об этом мы поговорим во второй статье цикла, в которой я расскажу вам об интеграции контроллеров CANNY с системой Arduino Mega Server.
Напомню, что AMS теперь работает не только на платах Arduino, но и на беспроводных Wi-Fi модулях ESP8266 и именно о такой связке пойдёт речь в следующий раз.
И как обычно, оставайтесь с нами, будет интересно!
Изоляция и защита шин интерфейсов CAN и CAN-FD
Texas Instruments ISO1042 ISO105 SN6505 TPS76350

Используемые во многих системах для коммуникационных целей интерфейсы CAN уязвимы для высоковольтных бросков напряжения. Однако некоторые устройства могут помочь защититься от этих проблем.
CAN (Controller Area Network – сеть контроллеров) – это очень популярная последовательная шина, широко используемая в автомобилях, средствах промышленной автоматизации и других промышленных приложениях. Более новая усовершенствованная версия, названная CAN-FD (гибкая скорость передачи данных), обеспечивает более высокие скорости и другие улучшения.
Как обнаружили многие разработчики, CAN часто требует электрической изоляции между узлами и защиты от высоковольтных выбросов, которые регулярно происходят в автомобильном и промышленном оборудовании. Некоторые из недавно анонсированных приемопередатчиков CAN теперь поддерживают последнюю спецификацию CAN-FD, и, кроме того, имеют необходимую изоляцию. Решения для защиты могут также быть основаны на внешних дискретных компонентах, подключаемых к шине.
Знакомство с CAN
CAN – это стандарт последовательного интерфейса, разработанный компанией Robert Bosch и одобренный Собществом автомобильных инженеров (SAE) еще в 1980-х годах. С тех пор, благодаря своей гибкости и надежности, он стал широко использоваться в транспортных средствах и многих промышленных приложениях. Топология интерфейса представляет собой дифференциальную шину с экранированной или неэкранированной витой парой, к которой может быть подключено до 127 узлов. Все узлы являются приемопередатчиками, способными посылать и получать данные. Выпускаются стандартные микросхемы приемопередатчиков, но многие микроконтроллеры имеют интегрированный интерфейс CAN (Рисунок 1).
| Рисунок 1. | Топология шины CAN, к которой подключены микроконтроллер с интерфейсом CAN и другие приемопередающие узлы. |
Данные передаются кадрами, состоящими из 8 байт данных, адресного поля, поля контрольной суммы CRC и других служебных полей. Скорость передачи данных не фиксирована и, начинаясь с 5 кбит/с, может достигать 1 Мбит/с. Максимальная длина шины при скорости 1 Мбит/с равна 40 м. Используется множественный доступ к шине с прослушиванием несущей и обнаружением коллизий (CSMA/CD). CAN имеет ряд разновидностей, таких как CAN-FD, CANopen и SAE J1939. Используются также обозначения ISO-11898 и ISO-11519, присвоенные Международной организацией по стандартизации (ISO).
Читайте также: Наружный диаметр шин таблица в сантиметрах
CAN-FD (ISO-11898-1) – это новейшая версия, которая увеличивает скорость передачи данных до 5 Мбит/с и выше, что делает систему более адаптированной к приложениям реального времени, требующим более низкой задержки и большего детерминизма. Кадр большего размера теперь вмещает 64 байта данных.
Необходимость изоляции
Помимо широкого распространения в автомобильных приложениях, интерфейс CAN используется в системах промышленной автоматизации, драйверах двигателей переменного и постоянного тока, каналах обмена ПЛК, источниках питания телекоммуникационного оборудования, системах отопления и кондиционирования, лифтах, солнечных инверторах и зарядных станциях электрических автомобилей. В некоторых случаях в оборудовании имеются низко- и высоковольтные сегменты, которые должны быть изолированы друг от друга, чтобы защитить низковольтные компоненты от повреждения.
Высоковольтные двигатели, коммутаторы, источники питания и другое оборудование могут генерировать помехи амплитудой в сотни и тысячи вольт. Высоковольтный сигнал, попадающий в низковольтную подсистему, потенциально может уничтожить микроконтроллер. Способом решения этой проблемы является использование изолированных приемопередатчиков и отдельных источников питания с их собственными возвратными землями.
Изоляция
В современных системах CAN необходимо изолировать как сигналы, так и питание. Изоляция реализуется в приемопередатчике, но ее эффект пропадет, если блоки питания по разные стороны изолирующего барьера будут просто соединены друг с другом.
Во многих новых приемопередатчиках CAN используется емкостная изоляция между входами и выходами данных и цепями подключения шины. Два слоя двуокиси кремния образуют два последовательно соединенных конденсатора, через которые передаются данные между схемами, расположенными на двух разных кристаллах, соединенных внутри корпуса.
Примером может служить ISO1042 – выпущенный компанией Texas Instruments новый изолированный приемопередатчик CAN, обеспечивающий емкостную изоляцию и защиту практически любых промышленных и автомобильных конструкций. Устройство, отвечающее требованиям стандартов физического уровня ISO 11898-2 и ISO 11898-5, поддерживает стандарты CAN до 1 Мбит/с и CAN-FD до 5 Мбит/с. Защита шины выдерживает напряжения ±70 В и синфазные напряжения ±30 В. Диапазон напряжений питания составляет от 1.7 В до 5.5 В. Поддерживаются логические уровни 1.8, 2.5, 3.3 и 5.0 В. Микросхема ISO1042 выпускается в корпусах SOIC-8 или SOIC-16.
Реализация разделенного источника обеспечивает дополнительный уровень изоляции. Один из подходов с использованием устройства Texas Instruments показан на Рисунке 2. Микросхема генератора/драйвера SN6505 формирует 100-килогерцовый сигнал для трансформатора, выходное напряжение которого, преобразованное до требуемого уровня, затем выпрямляется и фильтруется. Трансформатор обеспечивает необходимую изоляцию питания. Отфильтрованное напряжение стабилизируется LDO регулятором (таким, скажем, как TPS76350) и питает приемопередатчик CAN. Узловые приемопередатчики и выводы интерфейса CAN микроконтроллера подключаются к шине через дифференциальные линии CANL и CANH.
| Рисунок 2. | Так выглядит изолированный узел CAN с изолированным источником питания и изолированным приемопередатчиком. |
Для упрощения процесса проектирования изолированных подсистем CAN и изоляции сигналов и питания CAN выпускаются различные устройства, как дискретные, так и интегральные.
Защита шины CAN
Изолированные системы обеспечивают нормальную защиту микросхем. Однако в некоторых условиях могут возникать проблемы электростатических разрядов (ESD), высокий уровень которых способен повредить приемопередатчик. По этой причине шина должна быть каким-то образом защищена. При этом крайне важно, чтобы выбранное устройство защиты интерфейса было совместимо с приемопередатчиком.
Наилучшим решением для защиты является использование супрессоров (TVS-диодов), подключенных между каждой линией шины и землей (Рисунок 2). Эти диоды фактически представляют собой два встречно включенных стабилитрона с высоким пробивным напряжением. Максимально допустимое напряжение на выводах приемопередатчиков зависит от типа микросхемы.
Приемопередатчик ISO105 компании TI выдерживает напряжения в диапазоне от −27 В до +40 В. ISO1042 рассчитан на броски напряжения до ±70 В. Максимальное пробивное напряжение супрессоров должно быть меньше этих значений, но больше рабочего напряжения сигналов на шине. Обычно два логических уровня шины составляют менее половины напряжения питания «0» и напряжения питания «1».
Не забывайте, что добавление TVS-диодов обеспечивает защиту от ESD, но одновременно добавляет к шине емкость, ограничивающую верхние скорости передачи данных. Необходимо, чтобы дополнительная емкость была меньше 50 пФ.
Материалы по теме
Перевод: AlexAAN по заказу РадиоЛоцман






