Как видно из задания, привод состоит из электродвигателя, ременной передачи и редуктора. Электродвигатель соединяется с входным валом редуктора с помощью ременной передачи, состоящей из ведущего l и ведомого 2 шкивов. Вращение от шкива l к шкиву 2 передается при помощи ремня. От шкива 2 вращение через зубчатую передачу (состоящую из шестерни 3 и зубчатого колеса 4) передается выходному валу.
Электродвигатель относится к числу унифицированных узлов, преобразующих электрическую энергию в механическую. В приводах обычно используются асинхронные трехфазные короткозамкнутые электродвигатели серии 4А по ГОСТ 19523-74, извлечения из которого приведены в прил. 2.
Редуктором называют зубчатый механизм, предназначенный для передачи вращательного движения с понижением числа оборотов на выходном валу (по сравнению с входным) и увеличения вращающего момента.
Редуктор может состоять из одной или нескольких зубчатых передач. В зависимости от числа зубчатых передач различают редукторы одноступенчатые, двухступенчатые и т.д.
Наиболее распространенными являются цилиндрические, конические и
червячные редукторы. Цилиндрические предназначены для передачи вращательного движения между валами с параллельными осями, конические — с пересекающимися осями, червячные — со скрещивающимися осями.
В предлагаемом задании используется одноступенчатый (применяется одна передача) цилиндрический (оси валов, между которыми осуществляется передача вращения — параллельны) косозубый (угол наклона линии зуба Р>0) редуктор.
Определение кинематических параметров привода
Подбор стандартного электродвигателя
Входная мощность Рвх на валу электродвигателя, которая обеспечит заданную мощность на выходном валу привода Рвых, определяется с учетом потерь в элементах привода из формулы общего коэффициента полезного действия (КПД):
Общий КПД заданного привода nобш определяется по формуле
где ŋ — КПД ременной передачи. ŋ — КПД зубчатой передачи, ŋ — КПД одной пары подшипников. Для клиноременной передачи рекомендуется ŋ = 0,95. 0.96; для зубчатой цилиндрической передачи ŋ = = 0,97. 0,98; КПД одной пары подшипников ŋ = 0,99. 0,995; к — число пар подшипников.
В соответствии с вышеизложенными рекомендациями, принимаем КПД ŋ рn = 0.95, ŋ 3n = 0,98. ŋ подш = 0,99. Анализируя конструкцию заданного привода (см. рис. 8), приходим к выводу, что в данной конструкции 2 пары подшипников (т.е. к = 2). Тогда:
Входная (требуемая) мощность электродвигателя:
По найденному значению Рвх подбираем из прил. 2 стандартный электродвигатель. При выборе электродвигателя должно быть выполнено условие Рвх > Рвх . С учетом этого условия принимаем электродвигатель 4A90L4Y3 свой с номинальной мощностью Рвх = 2,2 кВт и асинхронным числом оборотов вала электродвигателя nвх= 1425 об/мин.
Определение передаточных чисел элементов привода
Передаточное число привода можно определить из соотношения
Общее передаточное число привода представляет собой также произведение передаточного числа ременной передачи Uрем и цилиндрического редуктора Up (т.е. Uпр= Upcм * Up). Отсюда:
Значение передаточного числа ременной передачи ориентировочно должно находиться в пределах Uрем = 1,5. 3. При значительном отличии Uрем
от указанных пределов необходимо принять иное значение числа оборотов вала электродвигателя пвх и пересчитать значения Uпр и U рем .
Определение частот вращения валов привода
Частоты вращения определяются с учетом рассчитанных передаточных чисел привода.
Частота вращения первого (ведущего) вала привода (вала электродвигателя) п1 =пвх= 1425свое об/мин.
Частота вращения второго вала привода (входного валаредуктора):
Частота вращения третьего вала привода (выходного вала редуктора):
Видео:Ременная передача. Урок №3Скачать

Регулирование частоты вращения электроприводов
Регулирование частоты вращения ЭП — это изменение частоты вращения вала ЭД в целях регулирования скорости движения ИО рабочих машин механизмов. Регулирование частоты вращения ЭП и поддержание ее скорости на заданном уровне — может осуществляться двумя способами — параметрическим и в замкнутых системах.
При параметрическом способе регулирование частоты вращения вала ЭД достигается изменением параметров электрических цепей двигателей или питающего напряжения за счет включения различных дополнительных элементов: резисторов, конденсаторов, индуктивностей.
Высокие, качественные показатели регулирования частоты вращения вала ЭД имеют замкнутые системы ЭП, в которых воздействие на двигатель обычно осуществляется изменением подводимого к двигателю напряжения или частоты этого напряжения. Для этой цели в структуру ЭП включают различные силовые преобразователи постоянного и переменного тока, которые на рис. 13.1. обозначены ЭПУ.
Регулирование скорости в количественном отношении характеризуется следующими основными показателями.
1. Диапазон регулирования D определяется отношением максимальной сотах и минимальной comin частот, получаемых на естественной и искусственной механических характеристиках при заданных пределах изменения нагрузки на валу двигателя. Для разных механизмов по технологическим условиям требуется различный диапазон регулирования:

- 2. Направление регулирования частоты вращения определяется расположением получаемых искусственных характеристик относительно естественной. Если они располагаются выше естественной, то регулирование реализуется вверх от основной, ниже — вниз от основной. Расположение искусственных характеристик как выше, так и ниже естественной обеспечивает так называемое двухзонное регулирование.
- 3. Плавность регулирования частоты определяется числом получаемых в данном диапазоне искусственных характеристик. Чем их больше, тем регулирование частоты будет осуществляться плавнее. Плавность оценивается коэффициентом, который находится как отношение частот вращения на двух ближайших характеристиках,

где соj и coj.j — скорости на z’-й и (i — 1)-й искусственных характеристиках.
Наибольшая плавность достигается в замкнутых системах с использованием преобразователей напряжения и частоты, небольшая плавность обычно соответствует параметрическим способам регулирования.
- 4. Стабильность частоты вращения характеризуется изменением частоты вала ЭД при изменении момента нагрузки на его валу. Все основные типы двигателей, за исключением синхронного, имеют (см. рис. 13.7) наклон механической характеристики к оси моментов, вследствие чего при увеличении нагрузки их частота вращения падает. Наибольшую стабильность имеет синхронный двигатель. Чем большее падение частоты вращения при одном и том же изменении момента на валу ЭД, тем менее стабильна частота вращения.
- 5. Экономичность регулирования частоты вращения характеризуется капитальными затратами на создание автоматизированного электропривода и затратами при его эксплуатации. Определение экономичности той или иной системы представляет собой в общем случае сложную технико-экономическую задачу, при решении которой должны учитываться повышение производительности рабочей машины и качество выпускаемой ею продукции, надежность привода при эксплуатации, дефицитность материалов и изделий, идущих на изготовление электропривода, и т.д.
Важнейшими показателями процесса регулирования скорости являются потери мощности ДР при регулировании и КПД привода — ц. Эти величины связаны известным соотношением

где Р2 — полезная мощность на валу двигателя.
6. Допустимая нагрузка двигателя соответствует такому моменту нагрузки, при котором нагрев двигателя не превосходит допустимого (нормативного). При работе на естественной механической характеристике такой нагрузкой является номинальный момент, при котором по двигателю протекает номинальный ток и его нагрев равен нормативному. Поскольку нагрев двигателя определяется, главным образом, протекающим по нему током, то при работе на искусственных механических характеристиках допустимой будет такая нагрузка, при которой ток в двигателе будет равен номинальному, а тем самым и его нагрев будет нормативным. При оценке допустимой нагрузки ЭД следует учитывать условия его охлаждения.
Видео:6.2 Кинематический расчет приводаСкачать
Регулирование частоты вращения электропривода с помощью
электромагнитной муфты скольжения
В конструкцию электроприводов ряда рабочих машин входят электромагнитные муфты различных видов[9,13]. Электромагнитная муфта — это силовое электромеханическое устройство позволяющее регулировать частоту вращения исполнительного органа рабочей машины при постоянной частоте вращения двигателя. В некоторых случаях электромагнитные муфты (ЭММ) используются и для регулирования прикладываемого к исполнительному органу момента. Широкое применение в автоматизированном электроприводе нашли следующие виды электромагнитных муфт: фрикционная (контактная и бесконтактная), порошковая и скольжения (асинхронная).
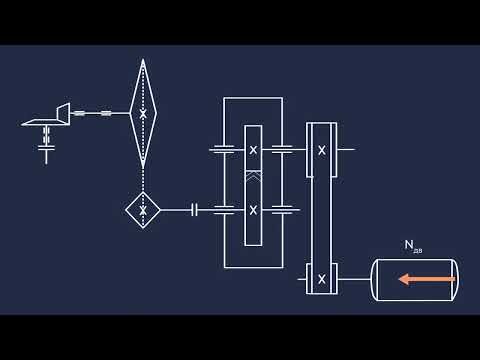
Электромагнитная муфта (рис. 5.20, а) состоит из двух механически не связанных друг с другом частей — ведущей и ведомой. Ведущая часть, называемая якорем 2 и выполняемая из ферромагнитного материала, соединяется с валом двигателя 1 (на рисунке показан асинхронный двигатель). Ведомая часть, называемая индуктором 4, располагается внутри ведущей части и соединяется через редуктор или непосредственно с исполнительным органом 6 рабочей машины. На индукторе 4 располагается обмотка возбуждения 3, которая через контактные кольца 5 подключена к источнику питания. Ток возбуждения  можно регулировать, за счет чего и происходит изменение частоты вращения ведомой части муфты, а следовательно, и исполнительного органа 6. Если обмотка индуктора 4 не обтекается током возбуждения, то между ним и якорем 2отсутствует магнитная связь и индуктор 4 неподвижен (
можно регулировать, за счет чего и происходит изменение частоты вращения ведомой части муфты, а следовательно, и исполнительного органа 6. Если обмотка индуктора 4 не обтекается током возбуждения, то между ним и якорем 2отсутствует магнитная связь и индуктор 4 неподвижен (  = 0).
= 0).
При протекании по обмотке 3тока возбуждения  в воздушном зазоре между якорем и индуктором возникает магнитное поле, под действием которого во вращающемся якоре 2 будут циркулировать вихревые токи. Взаимодействие этих токов с магнитным полем создает вращающий момент, под действием которого индуктор начинает вращаться в ту же сторону с частотой вращения .
в воздушном зазоре между якорем и индуктором возникает магнитное поле, под действием которого во вращающемся якоре 2 будут циркулировать вихревые токи. Взаимодействие этих токов с магнитным полем создает вращающий момент, под действием которого индуктор начинает вращаться в ту же сторону с частотой вращения .
Принцип действия электромагнитной муфты во многом похож на принцип действия асинхронного двигателя, имеющего массивный (сплошной) ротор. По механическим характеристикам муфты  = f(M) , представляющим собой зависимости частоты вращения индуктора (ведомой части) от развиваемого им момента
= f(M) , представляющим собой зависимости частоты вращения индуктора (ведомой части) от развиваемого им момента  при разных токах возбуждения
при разных токах возбуждения  (см.рис. 5.21, a), видно, что, например, при постоянном моменте на грузки
(см.рис. 5.21, a), видно, что, например, при постоянном моменте на грузки  регулирование тока возбуждения от
регулирование тока возбуждения от  до
до  позволяет изменять частоту вращения индуктора от
позволяет изменять частоту вращения индуктора от  до
до 
Рассмотренная муфта относится к группе электромагнитных муфт со связью между ее частями через магнитное поле. Существуют также муфты с механической связью. В них передача вращающего момента от ведущей части к ведомой осуществляется посредством механического трения или зацепления за счет создания между ними магнитного поля электромагнита с нормальным давлением.
Параметрическое регулирование частоты вращения электропривода с помощью электромагнитной муфты скольжения не может обеспечить необходимой точности и большого диапазона вследствие незначительной жесткости механических характеристик и снижающейся по мере уменьшения тока возбуждения перегрузочной способности муфты. С целью расширения диапазона регулирования частоты вращения и получения высокой точности используется система автоматического регулирования [22].

Рис.5.20. Электромагнитная муфта: а – схема устройства;
б – механические характеристики.
На рис.5.21, б показана принципиальная схема автоматического регулирования частоты вращения электропривода с электромагнитной муфтой скольжения (ЭМС) с отрицательной обратной связью по частоте вращения, осуществляемой при помощи тахогенератора BR, связанного с выходным валом электропривода.


Рис. 5.21. Схема автоматического регулирования частоты вращения асинхронного двигателя с использованием электромагнитной муфты и отрицательной обратной связи по скорости.
Регулятором частоты вращения РЧВ задается напряжение, сравниваемое с сигналом обратной связи; разность этих сигналов подается на усилитель У, выход которого подключается, через щетки и контактные кольца, к обмотке возбуждения ЭМС.

Возможно и бесконтактное исполнение ЭМС, в которой обмотка возбуждения располагается в корпусе муфты неподвижно относительно вращающегося якоря. В таких устройствах в качестве датчика обратной связи по частоте вращения вместо тахогенератора может быть применен электромагнитный импульсный датчик. На рис. 5.21, б приведены примерные механические характеристики ЭМС при автоматическом регулировании с отрицательной обратной связью по частоте вращения. Они расположены между характеристиками, обозначенными цифрами 1 и 2и соответствующими, приблизительно, 0,1 и номинальному токам возбуждения ЭМС при параметрическом
Читайте также: Гайка карданного вала 2107

регулировании.
Точность регулирования оказывается высокой, также как и диапазон регулирования, который может составить до (40…50) : 1 и зависит от коэффициента усиления системы; с увеличением последнего возрастает допустимый диапазон регулирования.
Потери в ЭМС складываются из потерь в якоре (роторе), обусловленных скольжением и передаваемым моментом; в обмотке возбуждения, в стали ротора, определяемые угловой частотой вращения и механическими потерями.
С увеличением скольжения превалируют потери скольжения; номинальная мощность, затрачиваемая на возбуждение ЭМС общего назначения с номинальным моментом от 75 до 1600 Н м, составляет в среднем от З до 0,7% максимальной мощности, передаваемой муфтой. В ЭМС специального назначения для передачи больших моментов мощность, затрачиваемая на возбуждение, еще меньше [22].
Таким образом, КПД. муфты

(5.50)
где М – момент, передаваемый муфтой; ,  — соответственно угловые скорости выходного вала муфты и приводного двигателя;
— соответственно угловые скорости выходного вала муфты и приводного двигателя;  — мощность затрачиваемая на возбуждение;
— мощность затрачиваемая на возбуждение;  — мощность, обусловленная механическими и вентиляционными потерями.
— мощность, обусловленная механическими и вентиляционными потерями.
При регулировании частоты вращения асинхронного двигателя с постоянным моментом нагрузки, пренебрегая для муфт средней и большой мощности и по сравнению с  , получаем:
, получаем:

(5.51)
Из (5.51) следует, что с возрастанием скольжения s КПД муфты снижается, развиваемая мощность снижается пропорционально уменьшению частоты вращения, а потребляемая муфтой мощность не изменяется.
Таким образом, избыточная мощность рассеивается в виде теплоты в рабочей поверхности якоря муфты. Зависимости потребляемой мощности потерь в якоре муфты полезной мощности и КПД от угловой частоты вращения при неизменном и вентиляторном моментах нагрузки приведены на рис.5.22, а и б. Анализ этих зависимостей указывает на то, что потери мощности в якоре ЭМС, как и следовало ожидать, совпадают с потерями мощности скольжения в роторной цепи асинхронного двигателя при реостатном регулировании, а также при регулировании изменением подводимого напряжения. КПД электропривода с ЭМС равен

(5.52)

где — КПД приводного асинхронного двигателя.
Так как КПД асинхронного двигателя является функцией, развиваемой мощности, то со снижением частоты вращения выходного вала ЭМС КПД электропривода будет еще более резко падать, чем на характеристиках рис. 5.22.
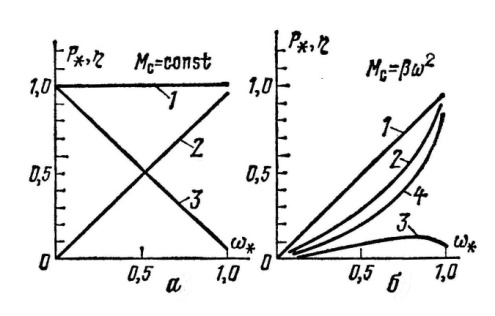
Рис.5.22. Зависимость мощностей и КПД от угловой скорости: а –при постоянном моменте нагрузки (M = const); б –при вентиляторном моменте нагрузки; 1- потребляемая мощность; 2- полезная мощность;
3 – потери в якоре муфты; 4 – КПД.
Коэффициент мощности электропривода с ЭМС зависит только от передаваемого момента и определяется коэффициентом мощности асинхронного двигателя. Если регулирование частоты вращения происходит с постоянным моментом, равным номинальному, то коэффициент мощности поддерживается номинальным независимо от скольжения ЭМС. При вентиляторной нагрузке коэффициент мощности зависит от скольжения ЭМС и заметно снижается со снижением астоты вращения.
Вследствие значительных потерь мощности в якоре ЭМС находят применение в приводах небольшой мощности (примерно до 20 кВт), регулируемых с постоянным моментом и работающих в повторно-кратковременном и кратковременном режимах. В случае вентиляторной нагрузки пределы регулирования, как и используемая мощность привода, могут быть значительно расширены.
Электропривод с электромагнитной муфтой скольжения привлекает своей простотой, высокой плавностью регулирования и малой мощностью преобразовательного устройства для намагничивания муфты. Применение электромагнитных муфт позволяет в ряде случаев упростить автоматизацию технологических процессов и регулирование скорости движения исполнительных органов рабочих машин.
5.9. Асинхронный вентильный каскад

В электромеханических системах, где применяется асинхронный двигатель с фазным ротором, возможно регулирование частоты вращения изменением сопротивления дополнительного резистора , включенного в роторную цепь. Однако регулирование частоты вращения сопровождается выделением в роторной цепи потерь мощности, пропорциональных скольжению. Поэтому этот способ не является экономичным. Потери мощности в роторе могут составить ощутимое значение. Пусть диапазон регулирования частоты вращения
D = 2: 1, момент электродвигателя постоянен и равен номинальному. Тогда при скольжении s = 0,5, что соответствует половине синхронной частоты вращения, потери мощности в роторе:
 (5.53 )
(5.53 )
где принято, что 
Таким образом, потери мощности могут составлять половину номинальной мощности электродвигателя  . При увеличении диапазона регулирования скорости эти потери возрастают еще больше. В общем случае при скольжении электромагнитная мощность передается на вал ротора с КПД, равным 1 — s,а полный КПД двигателя оказывается меньше этого значения. При низких угловых скоростях электромагнитная мощность почти полностью рассеивается в цепи ротора, поэтому КПД двигателя в этом случае имеет очень малое значение. Таким образом, регулирование скорости в широком диапазоне изменением сопротивления ротора связано с большими потерями. Реализовать непосредственно энергию скольжения асинхронного двигателя затруднительно, так как частота В роторной цепи отлична от частоты питающей сети. Однако при некоторых технических решениях это возможно. Первые схемы, позволяющие использовать энергию скольжения асинхронного двигателя, создавались путем специального соединения асинхронного двигателя с другими электрическими машинами. Поэтому они назывались каскадными. Вентильные преобразователи позволили создавать каскадные схемы без вращающихся электрических машин.
. При увеличении диапазона регулирования скорости эти потери возрастают еще больше. В общем случае при скольжении электромагнитная мощность передается на вал ротора с КПД, равным 1 — s,а полный КПД двигателя оказывается меньше этого значения. При низких угловых скоростях электромагнитная мощность почти полностью рассеивается в цепи ротора, поэтому КПД двигателя в этом случае имеет очень малое значение. Таким образом, регулирование скорости в широком диапазоне изменением сопротивления ротора связано с большими потерями. Реализовать непосредственно энергию скольжения асинхронного двигателя затруднительно, так как частота В роторной цепи отлична от частоты питающей сети. Однако при некоторых технических решениях это возможно. Первые схемы, позволяющие использовать энергию скольжения асинхронного двигателя, создавались путем специального соединения асинхронного двигателя с другими электрическими машинами. Поэтому они назывались каскадными. Вентильные преобразователи позволили создавать каскадные схемы без вращающихся электрических машин.
Каскадными называют такие схемы включения асинхронного двигателя, которые позволяют использовать энергию скольжения путем отдачи ее в сеть или превращения ее в механическую энергию, передаваемую на вал главного двигателя [17].
Существуют две принципиально различные группы схем каскадов. В первой из них, как показано на рис. 5.23 на вход преобразователя Пр поступает энергия скольжения частоты  с колец АД, а выход преобразователя, характеризующийся напряжением
с колец АД, а выход преобразователя, характеризующийся напряжением  и частотой сети
и частотой сети  , соединен с питающей сетью. В каскадах этой группы энергия скольжения
, соединен с питающей сетью. В каскадах этой группы энергия скольжения  за вычетом потерь энергии непосредственно в обмотке ротора АД и элементах преобразователя Пр
за вычетом потерь энергии непосредственно в обмотке ротора АД и элементах преобразователя Пр  +
+ 

возвращается в питающую сеть, что иллюстрируется энергетической диаграммой на рис.5.23, б. Между элементами преобразователя и асинхронным двигателем в схеме на рис.5.23, а, а имеется только электрическое соединение. Такие каскадные установки называются электрическими. На рис. 5.23, а приведена принципиальная схема каскадных установок другого типа. Энергия скольжения в каскадах этой группы поступает на вход преобразователя. Преобразователь на выходе создает напряжение которое подается на зажимы вспомогательного двигателя ВД. Последний преобразует электрическую энергию, поступающую от преобразователя в механическую, которая возвращается на вал АД, поскольку валы АД и ВД соединены.

Рис. 5.23. Электрический асинхронный каскад: а — принципиальная схема; б — энергетическая диаграмма.
Если пренебречь потерями в двигателях каскада, то становится очевидным, что на вал каскадной установки от АД поступает механическая мощность  , а от ВД — электромагнитная мощность
, а от ВД — электромагнитная мощность  = M
= M  .
.
Суммарная механическая мощность на валу каскада

(5.54)
Таким образом, механическая мощность на валу этого каскада примерно равна электромагнитной мощности, передаваемой со статора на ротор асинхронного двигателя. Из рис.5.24, а видно, что элементы преобразователя соединены с АД как электрическим (вход Пр — кольца АД), так и механическим путями (вал ротора ВД — вал ротора АД). Поэтому такие каскады называются электромеханическими. Приведенная на рис.5.24, б энергетическая диаграмма характеризует последовательность преобразования энергии электромеханического каскада.

Рис.5.24. Электромеханический асинхронный каскад:
а — принципиальная схема; б – энергетическая диаграмма.
Таким образом, в качестве АД может быть использован только асинхронный двигатель с фазным ротором, который называется главным приводным двигателем. Момент на валу электрического каскада равен моменту только АД, а момент на валу электромеханического каскада равен сумме моментов АД и ВД.
Асинхронные каскады работают за счет введения в цепь ротора АД добавочной ЭДС, с помощью которой можно регулировать угловую частоту вращения двигателя. Покажем, каким образом это возможно. Положим, что АД работает в двигательном режиме, потребляя электрическую энергию из питающей сети переменною тока и отдавая энергию скольжения в роторную цепь. Пусть к валу электродвигателя приложен статический момент  , не зависящий от частоты вращения. Если добавочная ЭДС в роторной цепи
, не зависящий от частоты вращения. Если добавочная ЭДС в роторной цепи  = 0, то ток ротора определяется только ЭДС роторной обмотки и ее параметрами. При введении в цепь ротора часть энергии скольжения потребляется источником ЭДС, а количество электрической энергии, выделяемой непосредственно в обмотке ротора, уменьшается. Это приводит к уменьшению тока ротора согласно выражению
= 0, то ток ротора определяется только ЭДС роторной обмотки и ее параметрами. При введении в цепь ротора часть энергии скольжения потребляется источником ЭДС, а количество электрической энергии, выделяемой непосредственно в обмотке ротора, уменьшается. Это приводит к уменьшению тока ротора согласно выражению
 (5.55 )
(5.55 )
Снижение тока ротора определяет уменьшение электромагнитного момента двигателя, который становится меньше статического момента нагрузки, и двигатель начинает замедляться. Но при уменьшении частоты вращения увеличивается скольжение, а значит, и ЭДС ротора, так как =  s (где — ЭДС в неподвижном роторе). Увеличение
s (где — ЭДС в неподвижном роторе). Увеличение  приводит к увеличению тока
приводит к увеличению тока  и момента АД. Когда момент каскадной установки вновь становится равным статическому моменту
и момента АД. Когда момент каскадной установки вновь становится равным статическому моменту  двигатель перестает замедляться и снова работает в установившемся режиме, но уже при более низкой частоте вращения.
двигатель перестает замедляться и снова работает в установившемся режиме, но уже при более низкой частоте вращения.
При увеличении добавочной ЭДС ротора угловая скорость двигателя уменьшается, а при уменьшении — увеличивается. При = 0 АД работает на механической характеристике, близкой
к естественной.
Современные каскадные схемы, как правило, построены на использовании статических полупроводниковых преобразователей.
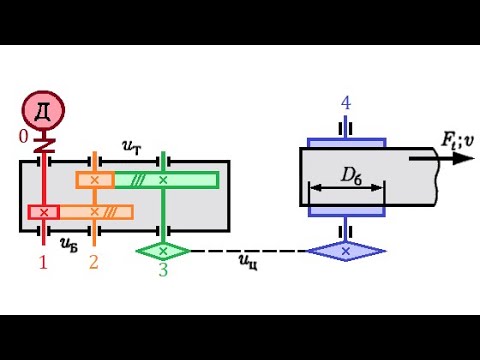
На рис.5. 25 приведена схема асинхронною вентильного каскада (АВК). Для преобразования постоянного тока в переменный в нем использован инвертор И, состоящий из управляемых тиристоров. Для согласования напряжения ротора двигателя с напряжением сети служит трансформатор Т. Добавочной ЭДС, вносимой в цепь выпрямленного тока ротора АД в данном случае является ЭДС инвертора, которая регулируется изменением угла опережения открывания тиристоров  . Ток ротора двигателя АД выпрямляется трехфазным мостовым выпрямителем В. для сглаживания пульсаций выпрямленного тока в схему включен реактор L. При работе АВК мощность скольжения с ротора АД через выпрямитель и инвертор поступает обратно в электрическую сеть, где она полезно используется. Регулирование ЭДС инвертора приводит к изменению потока энергии от ротора АД в сеть и, как следствие, к изменению частоты вращения электропривода. В соответствии со схемой замещения (рис.5.25, б) для цепи выпрямленного тока ротора можно записать
. Ток ротора двигателя АД выпрямляется трехфазным мостовым выпрямителем В. для сглаживания пульсаций выпрямленного тока в схему включен реактор L. При работе АВК мощность скольжения с ротора АД через выпрямитель и инвертор поступает обратно в электрическую сеть, где она полезно используется. Регулирование ЭДС инвертора приводит к изменению потока энергии от ротора АД в сеть и, как следствие, к изменению частоты вращения электропривода. В соответствии со схемой замещения (рис.5.25, б) для цепи выпрямленного тока ротора можно записать  (5.56)
(5.56)
где  =
=  — ЭДС трехфазного мостового выпрямителя;
— ЭДС трехфазного мостового выпрямителя;  — действующее значение линейной ЭДС на кольцах неподвижного ротора АД ( s = 1);
— действующее значение линейной ЭДС на кольцах неподвижного ротора АД ( s = 1);  =
=  — ЭДС трехфазного мостового инвертора;
— ЭДС трехфазного мостового инвертора;  — действующее значение вторичного линейного напряжения трансформатора;
— действующее значение вторичного линейного напряжения трансформатора;  — угол опережения инвертора;
— угол опережения инвертора;  и
и  — падение напряжения соответственно в диодах выпрямителя и тиристорах инвертора;
— падение напряжения соответственно в диодах выпрямителя и тиристорах инвертора;  — выпрямленный ток;
— выпрямленный ток;  — эквивалентное сопротивление цепи выпрямленного тока
— эквивалентное сопротивление цепи выпрямленного тока  (5.57)
(5.57)
где 
 — индуктивные сопротивления фазы ротора АД и трансформатора Т;
— индуктивные сопротивления фазы ротора АД и трансформатора Т;  — активные сопротивления фазы ротора АД, трансформатора и сглаживающего реактора.
— активные сопротивления фазы ротора АД, трансформатора и сглаживающего реактора. 
Рис.5.25. Асинхронный вентильный каскад.

(5.58 )
Момент, развиваемый асинхронным двигателем, примерно пропорционален выпрямленному току ротора. Следовательно, регулирование последнего изменением ЭДС инвертора позволяет регулировать момент и частоту вращения двигателя.
Если выпрямленная ЭДС инвертора равна выпрямленному напряжению ротора двигателя, то ток в цепи ротора и момент, развиваемый двигателем, равны нулю.
Читайте также: Допуск вала под шпонку
При уменьшении ЭДС инвертора ток в цепи ротора возрастает, момент двигателя увеличивается, и частота вращения повышается. Так как с увеличением частоты вращения скольжение s и ЭДС трехфазного мостового выпрямителя уменьшаются, то ускорение двигателя происходит до тех пор, пока момент двигателя не становится равным моменту нагрузки.
При увеличении ЭДС инвертора ток ротора и момент уменьшаются, и частота вращения двигателя снижается. По мере уменьшения частоты вращения повышается выпрямленное напряжение ротора. Ток ротора и момент двигателя увеличиваются до тех пор, пока момент, развиваемый двигателем, снова не становится равным статическому моменту сопротивления. При этом двигатель начинает работать в установившемся режиме с новым значением частоты
вращения (скольжения).
При постоянстве управляющего воздействия и изменении момента нагрузки на валу переходный процесс протекает аналогично изложенному. Например, при увеличении момента на валу двигателя частота вращения снижается, вследствие этого возрастает ЭДС ротора и, следовательно, увеличивается выпрямленный ток и момент двигателя до тех пор, пока момент двигателя не становится равным моменту сопротивления на его валу.
В режиме холостого хода момент на валу двигателя и ток ротора равны нулю. Поэтому должны быть взаимно уравновешены выпрямленные напряжения в выражении ( 5.56 ), т. е.
 (5.59)
(5.59)
где  — коэффициент трансформации асинхронного двигателя.
— коэффициент трансформации асинхронного двигателя.
Если = 1, то частота вращения холостого хода двигателя можно регулировать до номинального значения.
Чтобы двигатель развивал момент, в цепи ротора должен протекать ток, при этом выпрямленное напряжение ротора должно обеспечить протекание этого тока навстречу ЭДС инвертора. Это достигается за счет некоторого снижения угловой скорости двигателя при увеличении нагрузки, что приводит к соответствующему увеличению напряжения и тока ротора. При малом сопротивлении ротора мощность скольжения Р s, определяемая первыми гармониками тока и напряжения, примерно равна мощности в цепи выпрямленного тока

(5.60)
Учитывая, что  =М
=М  , можно получить
, можно получить  (5.61)
(5.61)
Если не учитывать падение частоты вращения при нагрузке, то полученное соотношение можно подставить в формулу (5.59), справедливую для скольжения при холостом ходе двигателя. Используя зависимость для ЭДС инвертора, получим :
 (5.62)
(5.62)
Следовательно, момент в установившемся режиме пропорционален выпрямленному току ротора  , который, в свою очередь, линейно зависит от разности выпрямленной ЭДС выпрямителя и ЭДС инвертора. На рис. 5.25, в показан примерный вид механических характеристик АВК. Меньшая жесткость характеристик АВК по сравнению с естественной характеристикой асинхронного электродвигателя объясняется дополнительными падениями напряжения в выпрямителе, инверторе, трансформаторе, что учитывается эквивалентным сопротивлением
, который, в свою очередь, линейно зависит от разности выпрямленной ЭДС выпрямителя и ЭДС инвертора. На рис. 5.25, в показан примерный вид механических характеристик АВК. Меньшая жесткость характеристик АВК по сравнению с естественной характеристикой асинхронного электродвигателя объясняется дополнительными падениями напряжения в выпрямителе, инверторе, трансформаторе, что учитывается эквивалентным сопротивлением  .
.
Представленная схема АВК обеспечивает двигательный режим работы при скорости ниже синхронной; частота вращения двигателя плавно регулируется вниз от естественной характеристики. Пуск асинхронного двигателя в схеме АВК — резисторный. Ротор при пуске отсоединяется от выпрямителя и подключается к пусковому резистору. После достижения номинальной скорости ротор асинхронного двигателя подключается к выпрямителю. для торможения в приведенной схеме АВК используется динамическое торможение.
Принципиальным недостатком АВК является его низкий коэффициент мощности. Если схема рассчитана для регулирования скорости в широком диапазоне, то при номинальной нагрузке и максимальной скорости коэффициент мощности не может быть более 0,5, уменьшаясь до 0,3 и меньше при снижении угловой скорости. Низкий коэффициент мощности частично вызван потреблением дополнительной реактивной мощности, необходимой для коммутации тиристоров выпрямительного моста в цепи ротора.
Реактивная мощность, потребляемая инвертором, тоже снижает общий коэффициент мощности системы. Среднее значение ЭДС инвертора максимально при наименьшей угловой частоты вращения двигателя. Максимальной ЭДС в идеальном случае соответствует угол управления, равный 180°, однако в действительности по причине процессов коммутации и запаса на восстановление запирающих свойств тиристоров он несколько меньше 180°. Это приводит к тому, что токи на выходе инвертора опережают соответствующие фазные напряжения, т. е. инвертор работает как генератор опережающей реактивной мощности или как потребитель отстающей реактивной мощности.
Потребление реактивной мощности увеличивается по мере уменьшения угла управления, которое производится с целью снижения ЭДС инвертора и скольжения двигателя. При полной угловой скорости угол управления равен 90°, и кажущаяся мощность инвертора почти полностью реактивная. Для любого значения угла управления активная мощность каскада равна разности соответствующих мощностей, потребляемой двигателем и возвращаемой в сеть инвертором. В то же время полная реактивная мощность состоит из суммы реактивных мощностей двигателя и инвертора, поэтому коэффициент мощности каскада падает со снижением скорости, так как потребление активной мощности при этом уменьшается.
Каскадные схемы включения асинхронных двигателей целесообразно использовать для двигателей большой мощности, где необходима реализация мощности скольжения, которая может составлять несколько тысяч киловатт. Для уникальных регулируемых электромеханических систем мощность двигателя может достигать 20. 30 тыс, кВт. В этих случаях применение каскадных установок может быть единственно возможным техническим решением.
В то же время применение современных средств преобразовательной техники позволяет создавать каскадные электромеханические системы с хорошими регулировочными свойствами, удовлетворяющими требованиям многих производственных механизмов. Тогда становится оправданным их применение и для двигателей меньшей мощности.
Объем и стоимость оборудования каскадных схем находится в прямой зависимости от диапазона регулирования. Поэтому наиболее выгодно применять АВК при неглубоком регулировании скорости, когда диапазон регулирования не превышает значения D = 2:1. АВК применяют в системах мощных вентиляторов, насосов, компрессоров.
Переходные процессы в электроприводах
Переходным процессом электропривода называют режим работы при переходе от одного установившегося состояния привода к другому, когда изменяются частота вращения, момент, и ток. Причинами возникновения переходных процессов в электроприводах являются либо изменение нагрузки, связанное с производственным процессом, либо внешнее воздействие на электропривод при управлении им, т. е. пуск, торможение, изменение направления вращения и т.п. Без переходных процессов не совершается работа ни одного электропривода. Даже в простейших нерегулируемых приводах требуется осуществлять пуск, остановку, реверсирование, которые являются наиболее характерными переходными процессами. Пуск и торможение могут быть основными рабочими состояниями, например в электроприводе строгального станка, насоса безбашенной
водокачки и т.п.
Переходные процессы в электроприводах могут возникнуть также в результате аварий или нарушения нормальных условий электроснабжения (например, изменение напряжения или частоты сети, несимметрия напряжения и т.п.).
Изучение переходных процессов электропривода имеет большое практическое значение. Правильный выбор мощности электродвигателей, правильный подбор аппаратов и расчет схем управления, уменьшение расхода энергии при пуске и торможении основаны на знании переходных режимов электроприводов.
Лишь для ограниченного числа исполнительных механизмов можно проектировать электроприводы без учета характера протекания переходных процессов. К ним относятся некоторые редко пускаемые и длительно работающие механизмы с простейшими пусковыми устройствами. Для большинства же рабочих машин характер протекания переходных процессов должен учитываться, так как он оказывает существенное влияние на работу привода.
Для увеличения производительности механизма необходимо не только выбрать оптимальное значение номинальной частоты вращения, но и стремиться к сокращению длительности переходных режимов привода.
Изучение переходных процессов и влияния на них различных электрических и механических параметров, например напряжения, сопротивления, индуктивности, махового момента и т. п., необходимо также для правильного выбора способов управления и расчета схем управления [16].
Значение расхода энергии в периоды пуска и торможения имеет особенно существенное значение для часто пускаемых приводов. Поэтому при расчете переходных режимов следует выбирать экономически целесообразные параметры привода и пытаться уменьшить расход энергии при пусковых и тормозных процессах. Переходные процессы в электроприводе характеризуются переходными механическими, электромагнитными и тепловыми процессами, действующими одновременно и взаимно связанными между собой.
При быстро протекающих процессах изменение теплового состояния электропривода в большинстве случаев не оказывает существенного влияния на другие виды переходных процессов. Поэтому в дальнейшем при изучении переходных процессов в электроприводах изменение теплового состояния двигателя не учитывают.
Внешней причиной, или возмущающим воздействием, вызывающим переходный процесс в электроприводе, могут быть резкие изменения питающего напряжения, механической нагрузки на валу, сопротивления в цепях двигателя.
Электрическая реакция привода на возмущающее воздействие, быстрота и характер переходного процесса зависят от инерционности энергетического машинного устройства.
Запас кинетической энергии в механических звеньях устройства и электромагнитной энергии в элементах его электрических целей не может изменяться мгновенно, поэтому переходные процессы требуют определенного времени,
Когда изменение кинетической энергии в одних элементах вызывает изменение электромагнитной энергии в других, может наступить периодическое преобразование одного вида энергии в другой и характер переходного процесса будет колебательный.
Переходные процессы в электроприводах в общем случае, если учитывать все инерционности, представляют сложное явление. Электромагнитные переходные процессы учитывают при расчете приводов с двигателями постоянного тока большой мощности.
В электроприводах с асинхронными двигателями электромагнитные переходные процессы, связанные с электромагнитной инерционностью, быстротечны и в практических расчетах их влиянием можно пренебречь.
В зависимости от того, какой вид инерции учитывают, переходные процессы электропривода условно делят на механические, т.е. такие, при рассмотрении которых принимают во внимание влияние только механической инерции, и электромеханические, где учитывают влияние не только механической, но и электромагнитной инерции.
6. 2. Механические переходные процессы
Расчеты механических переходных процессов выполняют на
основе уравнения движения электропривода:

(6.1)
Чтобы определить продолжительность переходного процесса,

разделим переменные
(6.2)
Проинтегрировав обе части равенства (6.2), получим, что
 (6.3)
(6.3)
где  ,
,  — начальное и конечное значения угловой скорости.
— начальное и конечное значения угловой скорости.
В приближенных расчетах динамический момент (М —  ) и момент инерции считают постоянными величинами, тогда
) и момент инерции считают постоянными величинами, тогда  (6.4)
(6.4)
При разгоне из неподвижного состояния, когда  ,
,  =
=  продолжительность разгона ( пуска)
продолжительность разгона ( пуска)
 (6.5)
(6.5)
Если осуществляется полная остановка от номинальной частоты вращения, то продолжительность торможения  (6.6)
(6.6)
При искусственном торможении
 , (6.7)
, (6.7)
где  — дополнительный тормозной момент.
— дополнительный тормозной момент.
В тех случаях, когда из-за сложного характера изменения вращающего или статического момента динамический момент нельзя считать постоянным, пользуются графоаналитическим методом определения продолжительности пуска [14]. Построив механические характеристики двигателя 1 (рис.6.1) и рабочей машины 2,строят кривую изменения динамического момента 3.

Рис.6.1. Построение графика изменения частоты вращения электро
Кривую динамического момента заменяют ломаной ступенчатой линией 4. В пределах каждой ступени динамический момент принимают постоянным, равным среднему значению его на этом участке.
Для каждого участка время разгона  (6.8)
(6.8)
где  — средний динамический момент на участке.
— средний динамический момент на участке.
Определив продолжительность разгона на участках, сложением можно найти полную продолжительность пуска и построить график изменения частоты вращения электропривода при пуске 5.
Для двигателей, имеющих линейную зависимость момента от частоты вращения в течение переходного процесса и постоянный момент сопротивления, формулы для расчетов можно получить из следующей системы уравнений:
Читайте также: Как снять запрессованный подшипник с вала

Подставляя в уравнение (6.9) значения из формул (6.10), (6.11), (6.12), получим
 (6.13)
(6.13)
Разделив на М/s все члены последнего уравнения, будем иметь  (6.14)
(6.14)
Величину J  /
/  выражаемую в секундах, называют электромеханической постоянной времени переходных процессов.
выражаемую в секундах, называют электромеханической постоянной времени переходных процессов.
Обозначив постоянную времени  ,уравнение (6.14) запишем в виде:
,уравнение (6.14) запишем в виде:  (6.15)
(6.15)
где  — скольжение двигателя, соответствующее моменту
— скольжение двигателя, соответствующее моменту

сопротивления .
Поскольку моменты прямо пропорциональны скольжению, последнее уравнение можно записать в виде:

(6.16)
отсюда
 (6.17)
(6.17)
Проинтегрировав обе части последнего равенства в пределах изменения момента от  до
до  , получим уравнение для определения продолжительности переходного процесса:
, получим уравнение для определения продолжительности переходного процесса:

(6.18)
Переходный процесс считают закончившимся, если конечное скольжение или момент отличается от установившегося значения на 2. . . 5%.
Из расчетов по формуле (6.18) следует, что переходный процесс при
таком условии заканчивается за время, равное (3. 4) .
6.3. Переходные процессы при резкопеременной нагрузке
Нагрузка некоторых машин, например дробилок, прессов, молотилок, представляет собой чередующиеся периоды кратковременного резкого повышения и снижения нагрузки. Эти машины конструируют таким образом, чтобы большие, в течение долей секунды действующие сопротивления преодолевались в основном инерционными силами. При этом нагрузочная диаграмма двигателя существенно отличается от нагрузочной диаграммы рабочей машины (рис.6.2). При большой нагрузке момент двигателя меньше статического, а при малой больше. Среднее значение момента двигателя равно среднему значению статического момента. Выравнивание момента двигателя тем больше, чем больше момент инерции энергетического машинного устройства, поэтому при наличии резкопеременной, которую также называют ударной, нагрузке, привод снабжают маховиком или делают массивными движущие рабочие органы.

Рис. 6.2. Изменение момента электродвигателя при резкопеременной нагрузке рабочей машины: 1- нагрузочная диаграмма двигателя; 2 – нагрузочная диаграмма рабочей машины.
Необходимый приведенный момент инерции можно определить, вычислив предварительно электромеханическую постоянную времени переходных процессов
 (6.19)
(6.19)
где  — продолжительность действия большой нагрузки
— продолжительность действия большой нагрузки  .
.
В то же время,  (6.20)
(6.20)
Из уравнений (6.19), ( 6.20)
 (6.21)
(6.21)
Если собственный приведенный момент инерции энергетического машинного устройства  оказывается меньше вычисленного, то устанавливают маховик с моментом инерции
оказывается меньше вычисленного, то устанавливают маховик с моментом инерции  , принимая
, принимая  = J —
= J —  .
.
В приводах машин с резкопеременной нагрузкой применяют двигатели, у которых большое скольжение  , так как это позволяет
, так как это позволяет
уменьшить .
Поскольку
 ,
,  ,
,
то уравнение для определения приведенного момента инерции можно записать в таком виде:
 (6.22)
(6.22)
Значения  и
и  берут из графика нагрузки (рис. 6.2). Значение момента электродвигателя к концу действия большой нагрузки принимают равной 0,75
берут из графика нагрузки (рис. 6.2). Значение момента электродвигателя к концу действия большой нагрузки принимают равной 0,75 
Уравнение для вычисления момента двигателя при ударной нагрузке можно получить из выражения (6.20), определяя из него . Алгебраическими преобразованиями и потенцированием логарифмической функции получают выражение:
 (6.23)
(6.23)
Момент электродвигателя изменяется по экспоненциальным кривым, как показано на рис. 6.2.
Для определения момента двигателя на втором участке в формулу (6.23) подставляют соответствующие значения  и , а именно
и , а именно
 ,
,  =
=  .
.
6.4. Энергопотребление при переходных процессах
При любом переходном процессе затрачивается определенное количество энергии [2]. Эту энергию можно представить в виде двух составляющих: полезной, связанной с выполнением электродвигателем определенной механической работы, и потерь энергии.
Полезная составляющая определяется изменением произведения момента двигателя на его угловую скорость. При этом в пусковых режимах, связанных с увеличением частоты вращения двигателя, энергия из сети расходуется на увеличение кинетической энергии движущихся частей электропривода, а в тормозных, наоборот, кинетическая энергия движущихся частей электропривода возвращается в сеть (при рекуперативном торможении) или выделяется в виде потерь (при динамическом торможении или торможении противовключением). Полезная составляющая энергии определяется технологическим процессом и в пусковых режимах повлиять на нее не представляется возможным, а в тормозных режимах она может быть возвращена в сеть за счет рекуперативного торможения (разумеется, за вычетом потерь).
Потери энергии принято делить на постоянные и переменные. Под постоянными подразумеваются потери энергии, не зависящие от нагрузки двигателя. К ним относятся потери в стали магнитопровода двигателя, механические потери от трения в подшипниках и вентиляционные потери. Постоянные потери не остаются неизменными и зависят от скорости двигателя, амплитуды и частоты питающего его напряжения и т. д. Но так как эти потери изменяются в ограниченных пределах и составляют незначительную часть общих потерь, то они принимаются неизменными и равными постоянным потерям при
номинальном режиме работы двигателя .
С точки зрения оптимизации энергопотребления наибольший интерес представляют переменные потери электропривода, которые складываются из мощности потерь в меди статора и ротора двигателя:  (6.24)
(6.24)
Браславский, И.Я. рекомендует использовать Г- образную схему замещения (см. рис.4.1) для анализа потерь в меди статора [2].  (6.25)
(6.25)
а суммарные потери в меди  (6.26)
(6.26)
Тогда потери энергии в течение переходного процесса  ,
,  (6.27)
(6.27)
Использование формулы (6.27) для оценки потерь энергии за время переходного процесса затруднительно, так как для этого необходимо знать законы изменения токов двигателя  и
и  в переходном процессе, а также располагать данными об изменении сопротивлений.
в переходном процессе, а также располагать данными об изменении сопротивлений.
Удобные расчетные соотношения можно получить при использовании механических переменных и параметров. Используя известное соотношение для переменных потерь в роторе (потерь скольжения)
 (6.28)
(6.28)
найдем энергию потерь в роторе за время переходного процесса:  (6.29 )
(6.29 )
Рассмотрим потери энергии при работе электропривода без нагрузки
( = 0).

Из уравнения механического движения электропривода при М = 0 получим
Подставив полученное значение dt в формулу (6.29) и заменив
пределы интегрирования, получим
 =
=  (6.30)
(6.30)  .
.
Выражение (6.30) более удобно для определения потерь энергии, так как для расчетов необходимо знать лишь параметры J и , начальное и конечное значения скольжения s.
Для примера найдем потери энергии в роторе асинхронного двигателя при его пуске, торможении и реверсе вхолостую.
При пуске двигателя  = 1 ,
= 1 ,  = 0, поэтому
= 0, поэтому  (6.31)
(6.31)
Потери энергии в роторе в соответствии с (6.31), численно равны кинетической энергии, которая будет запасена к концу пуска в движущихся частях электропривода.
Так как при динамическом торможении  = 1 , = 0, то потери энергии также определяются выражением (6.31). При этом весь запас кинетической энергии электропривода превращается в потери, выделяемые в виде теплоты.
= 1 , = 0, то потери энергии также определяются выражением (6.31). При этом весь запас кинетической энергии электропривода превращается в потери, выделяемые в виде теплоты.
При торможении противовключением = 2, = 1, а потери энергии  = 3J
= 3J  /2, т.е. в З раза превышают потери при пуске и динамическом торможении и численно равны тройному запасу кинетической энергии.
/2, т.е. в З раза превышают потери при пуске и динамическом торможении и численно равны тройному запасу кинетической энергии.
При реверсе = 2, = 0, а потери энергии = 4J /2,
т. е. они равны сумме потерь при торможении противовключением
и пуске.
Таким образом, потери энергии в роторе , за время переходного процесса при = 0 не зависят от времени, а определяются только начальным  и конечным значениями скольжения и суммарным моментом инерции электропривода J. Потери энергии зависят не только от значения изменения скольжения ( – ),но и от абсолютных значений скольжения. Найдем потери при изменении скольжения на 0,5 при разных значениях . Так, при = 1 и
и конечным значениями скольжения и суммарным моментом инерции электропривода J. Потери энергии зависят не только от значения изменения скольжения ( – ),но и от абсолютных значений скольжения. Найдем потери при изменении скольжения на 0,5 при разных значениях . Так, при = 1 и
= 0  = 0,75J /2, а при = 0,5 и = 0 = 0,25J /2, т.е. потери энергии отличаются в З раза.
= 0,75J /2, а при = 0,5 и = 0 = 0,25J /2, т.е. потери энергии отличаются в З раза.
Представление о зависимости энергии потерь в роторе от и  дают графики зависимости относительных потерь в меди ротора АД от и , приведенные на рис.6.3 (относительные потери энергии даны в долях от значения J /2, принятой за базовую
дают графики зависимости относительных потерь в меди ротора АД от и , приведенные на рис.6.3 (относительные потери энергии даны в долях от значения J /2, принятой за базовую  ). На рис.6.3 видно, что при одном и том же изменении скольжения s потери будут тем меньше, чем ближе к нулю значения и , т.е. переходные процессы вблизи угловой скорости холостого хода связаны с меньшими потерями.
). На рис.6.3 видно, что при одном и том же изменении скольжения s потери будут тем меньше, чем ближе к нулю значения и , т.е. переходные процессы вблизи угловой скорости холостого хода связаны с меньшими потерями.

Рис.6.3.Зависимость относительных потерь в роторе
асинхронного двигателя от значений скольжения.
Кроме того, одинаковые изменения скорости в разных направлениях приводят к разным потерям.
Из выражения (6.30) следует, что потери энергии в роторной цепи двигателя не зависят от времени переходного процесса. Это означает, что они не зависят и от формы механических характеристик электропривода. Так, для любой из механических характеристик асинхронного электропривода, примеры которых приведены на рис. 6.4, потери энергии в роторе при одинаковых изменениях скорости будут равными, не зависящими от значения сопротивления роторной цепи.
Это обстоятельство физически объясняется тем, что механическим характеристикам, для которых при данной скорости моменты больше, соответствуют большие потери, но меньшая продолжительность

Рис. 6.4.Примеры механических характеристик асинхронных
двигателей, которым соответствуют одинаковые потери в ро торе
Для определения суммарных потерь энергии в меди АД необходимо найти потери в меди статора. Очевидно, что  =
= 
т.е. эти потери зависят от сопротивлений резисторов в статорной и роторной цепей. Чем меньше сопротивление статорной цепи и больше роторной, тем меньше потери в статоре асинхронного двигателя. Уменьшение потерь в статоре с ростом сопротивления ротора
объясняется уменьшением пускового тока [2].
В двигателях общего назначения с короткозамкнутым ротором обычно  , т.е. в этом случае п отери в меди статора и ротора примерно одинаковы.
, т.е. в этом случае п отери в меди статора и ротора примерно одинаковы.
За счет применения двигателей со специальной конструкцией короткозамкнутого ротора, имеющего повышенное сопротивление, потери в статоре могут быть уменьшены. Например, это двигатели со сплошным стальным ротором и двигатели с повышенным номинальным скольжением краново-металлургической серии. Двигатели, имеющие ротор с глубокими пазами или с двойной «беличьей клеткой», также обладают повышенным сопротивлением ротора, зависящим от скольжения, что приводит к уменьшению переменных потерь в статоре.
Полные потери в меди АД  , (6.32)
, (6.32)
Для оценки суммарных потерь энергии в переходном процессе должны быть учтены рассмотренные выше постоянные потери энергии, которые будут зависеть от длительности переходного процесса, однако их учет даст более точное представление о потерях энергии только при чрезвычайно затянутых переходных процессах.
Потери энергии при работе электропривода с нагрузкой (  0).
0).
Для определения потерь энергии в меди ротора можно использовать формулу (6.29). При этом необходимо знать, как изменяются момент М(t)и скольжение s(t) двигателя в переходном процессе, а также

закон изменения М(t).
На основе уравнения движения электропривода
(6.33)
Подставив полученное значение dt в формулу (6.29) и заменив пределы интегрирования, найдем
(6.34)
Для оценочных расчетов можно принять, что момент двигателя и статический момент в переходном процессе не изменяются и равны некоторым средним значениям  и
и  . Тогда
. Тогда

(6.35)
Для иллюстрации зависимости потерь в меди ротора от нагрузки двигателя на рис.6.5 приведены графики относительных потерь (в долях от J /2) при пуске и динамическом торможении с постоянными моментом М и моментом нагрузки  , которые выражены в относительных единицах (за базовый момент принят
, которые выражены в относительных единицах (за базовый момент принят  ).
).

Рис.6.5. Зависимость относительных потерь в меди ротора
асинхронного двигателя при разных моментах нагрузки.

Из рисунка видно, зависимость потерь в меди ротора от нагрузки имеет вид гиперболы, кривизна которой уменьшается с уменьшением нагрузки. В соответствии с формулой (6.35) и приведенными на рис.6.5, графиками потери энергии в роторе АД при работе под нагрузкой увеличиваются в пусковых режимах и ум
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала
💡 Видео
Кинематический и силовой расчёт привода (общая методика расчёта). Ч.1Скачать

Как определить скорость вращения вала электродвигателя и его мощность.Скачать
Модуль №4. Частотное регулирование скорости асинхронного двигателяСкачать
Расчёт диаметров шкивов ремённой передачи. Часть 1. Инструкция на онлайн калькулятор. Тест привода.Скачать
Ремённые ПередачиСкачать
Кинематический расчет привода ч 1Скачать
Узнав этот секрет, ты больше никогда не выбросишь моторчик от микроволновки!Скачать
Как за 5 секунд узнать обороты электродвигателя без таблички без разборкиСкачать
ЛОМАЕТСЯ ДАТЧИК СКОРОСТИ. РЕШЕНИЕ ЭТОЙ ПРОБЛЕМЫ.Скачать
Как определить частоту вращения двигателяСкачать
Датчик оборотов выходного валаСкачать
Сделай так и ВИБРАЦИИ НА СКОРОСТИ больше не будет!Скачать
Как определить мощность, частоту вращения, двигателя без бирки или шильдика самому и простоСкачать
326) АВТОМАТИКА Предельный регулятор частоты вращения дизеля ( вопросы Госов и мкк )Скачать
Как нельзя регулировать скорость вращения электродвигателяСкачать
Датчики вращения: энкодеры и тахогенераторыСкачать
Датчик скорости входного вала KIA SORENTO BLСкачать
FIAT Panda ’80 • компактная МЕГА-ПРАКТИЧНОСТЬ 1980-х из ИТАЛИИ • вся ИСТОРИЯ от 1980-х до 2000-х!Скачать