
Поскольку все современные автомобили имеют несколько конфигураций шин данных, диагносты и автоэлектрики сталкиваются все чаще с неисправностями, связанными именно с передачей данных. Как правило, симптомом может быть отсутствие коммуникации с каким-то блоком, повторяющиеся «U» коды в нескольких блоках, относящихся к одной шине. Это может сопровождаться многочисленными активными лампами неисправностей на панели приборов.
Сегодня мы будем обсуждать неисправности шины CAN. Существует несколько способов определения ее целостности и нормальной коммуникации. Удобнее всего это делать осциллографом. Но не все осциллографы настолько быстры, чтобы читать пакеты в шинах данных. Некоторые сканеры также имеют встроенную функцию проверки целостности CAN шины, например, G-scan 3:
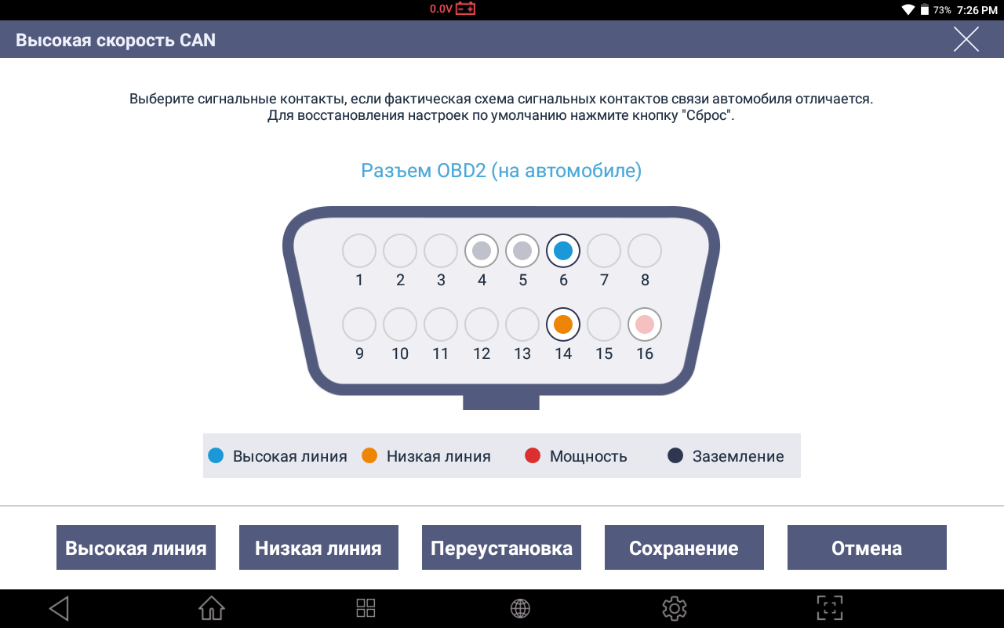
В этой статье мы расскажем о быстром способе диагностики CAN шины с помощью мультиметра через диагностический разъём. Он занимает немного времени и в любом автосервисе всегда есть мультиметр. Итак, пошаговая инструкция:
ШАГ 1: «Проверка Низкоскоростной CAN Шины на замыкание»:
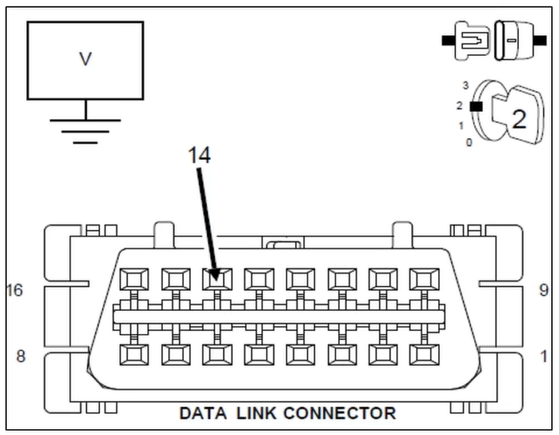
Отключаем сканер от розетки. Переводим ключ зажигания в положение 2 (ВКЛ). С помощью мультиметра измеряем напряжение (ПИН 14 на розетке и ЗЕМЛЯ). Есть ли у нас напряжение 10,0 вольт?
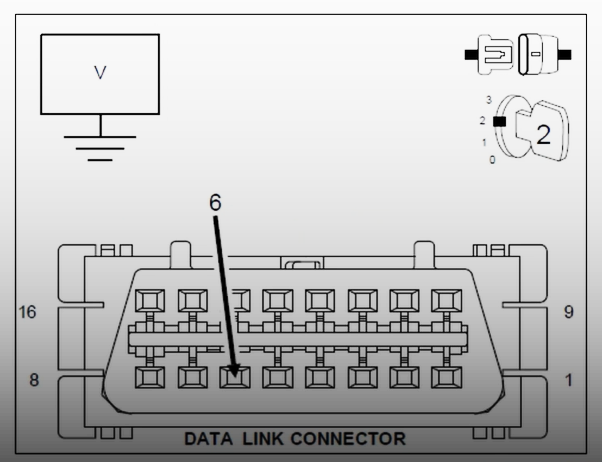
ШАГ 2: «Проверка Низкоскоростной CAN Шины на замыкание на землю»:
Находим ПИН 6 на розетке и второй шуп осциллографа подключаем к плюсовой клемме АКБ. Есть ли у нас 0 вольт? Если мы находим тут 0 вольт, то начинаем отключать модули по одному, пока не появится напряжение. Если оно так и не появилось, то проблема в проводке CAN шины и необходимо определить место предполагаемого замыкания и поменять витую пару.
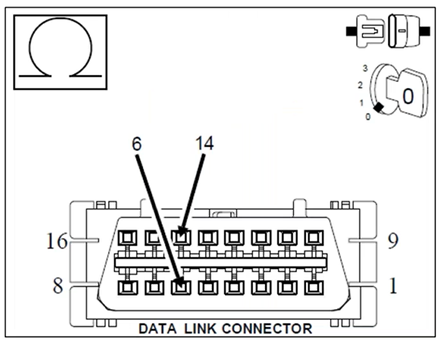
ШАГ 3: «Проверка терминирующих сопротивлений»:
Выключаем зажигание. Отключаем минусовую клемму аккумулятора. Переводим мульттимтер в режим измерения сопротивления и измеряем Сопротивление между высокой и низкой CAN шинами (между ПИНами 6 и 14). Получается ли сопротивление в диапазоне 53,5 — 67 Ом? Если ДА, то тест завершен. Если проблема остаётся, то значит она отсутствует на момент измерения и носит спорадический характер. Обратитесь к электросхеме автомобиля, проверьте коннекторы и другие элементы проводки на наличие окисления коннекторов, перегибов, старых отверстий от накола щупом осциллографа, возможности проникновения воды или коррозии. Проверьте целостность мест соединения. Если сопротивление не в диапазоне 53,5 — 67 Ом, то перейдите к следующему шагу.
ШАГ 4: «Высокое сопротивление цепи — более 67 Ом»:
Если измеренное сопротивление выше 67 Ом, то у нас высокий сигнал цепи CAN HIGH или LOW, её разрыв или один из терминирующих резисторов внутри ЭБУ поврежден. Если у нас низкое сопротивление цепи (ниже 53,5 Ом), то перейдите к следующему шагу.
ШАГ 5: «Низкое сопротивление цепи — ниже 53,5 Ом»:
Если измеренное сопротивление ниже 53,5 Ом, то у нас замыкание цепи между CAN HIGH и LOW. Необходимо разбить шину на участки и продиагностировать их отдельно на наличие замыкания. Если после отключения одного из модулей сопротивление становится нормлаьным, значит замыкание внутри блока управления и его необходимо менять.
Другими продвинутыми методами диагностики всех видов шин данных Вы сможете овладеть на наших занятиях!
Школа Автодиагностики ИНЖЕКТОРКАР
Написать комментарий
Ваш комментарий: Внимание: HTML не поддерживается! Используйте обычный текст.
Введите код, указанный на картинке:
Принцип работы и диагностика CAN-шины в автомобиле
Появление цифровых шин в автомобилях произошло позднее, чем в них начали широко внедряться электронные блоки. В то время цифровой «выход» им был нужен только для «общения» с диагностическим оборудованием – для этого хватало низкоскоростных последовательных интерфейсов наподобие ISO 9141-2 (K-Line). Однако кажущееся усложнение бортовой электроники с переходом на CAN-архитектуру стало ее упрощением.

Действительно, зачем иметь отдельный датчик скорости, если блок АБС уже имеет информацию о скорости вращения каждого колеса? Достаточно передавать эту информацию на приборную панель и в блок управления двигателем. Для систем безопасности это ещё важнее: так, контроллер подушек безопасности уже становится способен самостоятельно заглушить мотор при столкновении, послав соответствующую команду на ЭБУ двигателя, и обесточить максимум бортовых цепей, передав команду на блок управления питанием. Раньше же приходилось для безопасности применять не надежные меры вроде инерционных выключателей и пиропатронов на клемме аккумулятора (владельцы BMW с его «глюками» уже хорошо знакомы).
Однако на старых принципах реализовать полноценное «общение» блоков управления было невозможно. На порядок выросли объем данных и их важность, то есть потребовалась шина, которая не только способна работать с высокой скоростью и защищена от помех, но и обеспечивает минимальные задержки при передаче. Для движущейся на высокой скорости машины даже миллисекунды уже могут играть критичную роль. Решение, удовлетворяющее таким запросам, уже существовало в промышленности – речь идет о CAN BUS (Controller Area Network).
Суть CAN-шины
Цифровая CAN-шина – это не конкретный физический протокол. Принцип работы CAN-шины, разработанный Bosch еще в восьмидесятых годах, позволяет реализовать ее с любым типом передачи – хоть по проводам, хоть по оптоволокну, хоть по радиоканалу. КАН-шина работает с аппаратной поддержкой приоритетов блоков и возможностью «более важному» перебивать передачу «менее важного».
Для этого введено понятие доминантного и рецессивного битов: упрощенно говоря, протокол CAN позволит любому блоку в нужный момент выйти на связь, остановив передачу данных от менее важных систем простой передачей доминантного бита во время наличия на шине рецессивного. Это происходит чисто физически – например, если «плюс» на проводе означает «единицу» (доминантный бит), а отсутствие сигнала – «ноль» (рецессивный бит), то передача «единицы» однозначно подавит «ноль».
Представьте себе класс в начале урока. Ученики (контроллеры низкого приоритета) спокойно переговариваются между собой. Но, стоит учителю (контроллеру высокого приоритета) громко дать команду «Тишина в классе!», перекрывая шум в классе (доминантный бит подавил рецессивный), как передача данных между контроллерами-учениками прекращается. В отличие от школьного класса, в CAN-шине это правило работает на постоянной основе.
Для чего это нужно? Чтобы важные данные были переданы с минимумом задержек даже ценой того, что маловажные данные не будут переданы на шину (это отличает CAN шину от знакомого всем по компьютерам Ethernet). В случае аварии возможность ЭБУ впрыска получить информацию об этом от контроллера SRS несоизмеримо важнее, чем приборной панели получить очередной пакет данных о скорости движения.
В современных автомобилях уже стало нормой физическое разграничение низкого и высокого приоритетов. В них используются две и даже более физические шины низкой и высокой скорости – обычно это «моторная» CAN-шина и «кузовная», потоки данных между ними не пересекаются. К всем сразу подключен только контроллер CAN-шины, который дает возможность диагностическому сканеру «общаться» со всеми блоками через один разъем.
Например, техническая документация Volkswagen определяет три типа применяемых CAN-шин:
- «Быстрая» шина, работающая на скорости 500 килобит в секунду, объединяет блоки управления двигателем, ABS, SRS и трансмиссией.
- «Медленная» функционирует на скорости 100 кбит/с и объединяет блоки системы «Комфорт» (центральный замок, стеклоподъемники и так далее).
- Третья работает на той же скорости, но передает информацию только между навигацией, встроенным телефоном и так далее. На старых машинах (например, Golf IV) информационная шина и шина «комфорт» были объединены физически.
Интересный факт: на Renault Logan второго поколения и его «соплатформенниках» также физически две шины, но вторая соединяет исключительно мультимедийную систему с CAN-контроллером, на второй одновременно присутствуют и ЭБУ двигателя, и контроллер ABS, и подушки безопасности, и ЦЭКБС.
Физически же автомобили с CAN-шиной используют ее в виде витой дифференциальной пары: в ней оба провода служат для передачи единственного сигнала, который определяется как разница напряжений на обоих проводах. Это нужно для простой и надежной помехозащиты. Неэкранированный провод работает, как антенна, то есть источник радиопомех способен навести в нем электродвижущую силу, достаточную для того, чтобы помеха воспринялась контроллерами как реально переданный бит информации.
Но в витой паре на обоих проводах значение ЭДС помехи будет одинаковым, так что разница напряжений останется неизменной. Поэтому, чтобы найти CAN-шину в автомобиле, ищите витую пару проводов – главное не перепутать ее с проводкой датчиков ABS, которые так же для защиты от помех прокладываются внутри машины витой парой.
Диагностический разъем CAN-шины не стали придумывать заново: провода вывели на свободные пины уже стандартизированной в OBD-II колодки, в ней CAN-шина находится на контактах 6 (CAN-H) и 14 (CAN-L).

Поскольку CAN-шин на автомобиле может быть несколько, часто практикуется использование на каждой разных физических уровней сигналов. Вновь для примера обратимся к документации Volkswagen. Так выглядит передача данных в моторной шине:

Когда на шине не передаются данные или передается рецессивный бит, на обоих проводах витой пары вольтметр покажет по 2,5 В относительно «массы» (разница сигналов равна нулю). В момент передачи доминантного бита на проводе CAN-High напряжение поднимается до 3,5 В, в то время как на CAN-Low опускается до полутора. Разница в 2 вольта и означает «единицу».
Читайте также: Can шина forester sf5
На шине «Комфорт» все выглядит иначе:

Здесь «ноль» — это, наоборот, 5 вольт разницы, причем напряжение на проводе Low выше, чем на проводе High. «Единица» же – это изменение разности напряжений до 2,2 В.
Проверка CAN-шины на физическом уровне ведется с помощью осциллографа, позволяющего увидеть реальное прохождение сигналов по витой паре: обычным тестером, естественно, «разглядеть» чередование импульсов такой длины невозможно.

«Расшифровка» CAN-шины автомобиля также ведется специализированным прибором – анализатором. Он позволяет выводить пакеты данных с шины в том виде, как они передаются.

Сами понимаете, что диагностика шины CAN на «любительском» уровне без соответствующего оборудования и знаний не имеет смысла, да и банально невозможна. Максимум, что можно сделать «подручными» средствами, чтобы проверить кан-шину – это измерить напряжения и сопротивление на проводах, сравнив их с эталонными для конкретного автомобиля и конкретной шины. Это важно – выше мы специально привели пример того, что даже на одном автомобиле между шинами может быть серьезная разница.

Неисправности
Хотя интерфейс CAN и хорошо защищен от помех, электрические неисправности стали для него серьезной проблемой. Объединение блоков в единую сеть сделало ее уязвимой. КАН-интерфейс на автомобилях стал настоящим кошмаром малоквалифицированных автоэлектриков уже по одной своей особенности: сильные скачки напряжения (например, зимний запуск на сильно разряженном аккумуляторе) способны не только «повесить» ошибку CAN-шины, обнаруживаемую при диагностике, но и заполнить память контроллеров спорадическими ошибками, случайного характера.
В результате на приборной панели загорается целая «гирлянда» индикаторов. И, пока новичок в шоке будет чесать голову: «да что же это такое?», грамотный диагност первым делом поставит нормальный аккумулятор.

Чисто электрические проблемы – это обрывы проводов шины, их замыкания на «массу» или «плюс». Принцип дифференциальной передачи при обрыве любого из проводов или «неправильном» сигнале на нем становится нереализуем. Страшнее всего замыкание провода, поскольку оно «парализует» всю шину.
Представьте себе простую моторную шину в виде провода, на котором «сидят в ряд» несколько блоков – контроллер двигателя, контроллер АБС, приборная панель и диагностический разъем. Обрыв у разъема автомобилю не страшен – все блоки продолжат передавать информацию друг другу в штатном режиме, невозможной станет только диагностика. Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
А вот при обрыве между ЭБУ двигателя и АБС машина, скорее всего, уже не заведется: блок, не «видя» нужный ему контроллер (информация о скорости учитывается при расчете времени впрыска и угла опережения зажигания), уйдет в аварийный режим.
Если не резать провода, а просто постоянно подать на один из них «плюс» или «массу», автомобиль «уйдет в нокаут», поскольку ни один из блоков не сможет передавать данные другому. Поэтому золотое правило автоэлектрика в переводе на русский цензурный звучит как «не лезь кривыми руками в шину», а ряд автопроизводителей запрещает подключать к CAN-шине несертифицированные дополнительные устройства стороннего производства (например, сигнализации).
Благо подключение CAN-шины сигнализации не разъем в разъем, а врезаясь непосредственно в шину автомобиля, дают «криворукому» установщику возможность перепутать провода местами. Автомобиль после этого не то что откажется заводиться – при наличии контроллера управления бортовыми цепями, распределяющего питание, даже зажигание не факт что включится.
Что может быть неисправность шины данных can
Controller Area Network (шина данных CAN)
В период с 1984 по 1986 г.г., компанией Robert Bosch GmbH был придуман, разработан и воплощен в производство стандарт CAN — Controller Area Network (сеть контроллеров) , основной целью которого является объединение в единую сеть различных исполнительных устройств, датчиков, сенсоров и т.п.
И как оказалось впоследствии, шина данных CAN действительно имела множество преимуществ перед обычными жгутами проводов, причислим некоторые:
Раньше об этом понятии задумывались мало или вообще не задумывались. Потому что автомобилям хватало небольшого пучка проводов и пару-тройку устройств для нормальной работы двигателя внутреннего сгорания.
Однако технический прогресс идет вперед, вопросы экологии, безопасности дорожного движения и водителя, как участника этого движения, выходят на первое место, что приводит к постоянному увеличению количества электронных устройств на автомобиле.
Что такое «Электромагнитная совместимость на автомобиле»?
Это способность одновременного и стабильного функционирования множества различных электронных устройств на автомобиле без создания электромагнитных помех друг другу .
Шина CAN как раз отвечает этим важным требованиям.
Более конкретно об этом вопросе чуть позже.
Уменьшение количества кабельных соединений

Сначала немного о том, что же такое эта шина и как она выглядит:
Шина данных CAN – это обычная «витая пара», вот как на фото справа. Это специально скрученный двухжильный провод.
К этой витой паре подключены различные блоки управления – их называют «пользователи». Передача данных идет одновременно по двум проводам этой «витой пары». Важно знать, что логические уровни шины имеют зеркальное отображение: если по одному проводу передается уровень логического «нуля», то по другому проводу одновременно передается уровень логической «единицы».
Почему используется двухпроводная схема передачи данных:
- для стабильности распознавания ошибок
- для увеличения и повышения надёжности работы по передаче данных
Предположим, что пик напряжения возникнет только на одном проводе (например, вследствии проблем по электромагнитной совместимости) .
И тогда блоки-приёмники могут идентифицировать это как ошибку и проигнорировать данный пик напряжения.
Если же произойдет короткое замыкание или обрыв одного из двух проводов, то благодаря интегрированной программно-аппаратной концепции надёжности произойдёт переключение в режим работы по однопроводной схеме, и повреждённая передающая линия использоваться не будет.
Так вот, продолжим о «уменьшении количества соединений между устройствами шины CAN»:
- Провода от датчиков проводятся только к ближайшему блоку управления, который преобразует измеренные значения в пакет данных и передаёт его на шину данных CAN.
Уменьшение количества штекерных соединений
Уменьшение количества контактных выводов на блоках управления
А сейчас давайте посмотрим, что представляет из себя «пакет данных» шины CAN. Он состоит из семи последовательных полей (отрезков).
На приведенном внизу рисунке показано восемь полей, последнее Intermission – « Пауза между пакетами данных» и оно не входит в Data Frame :
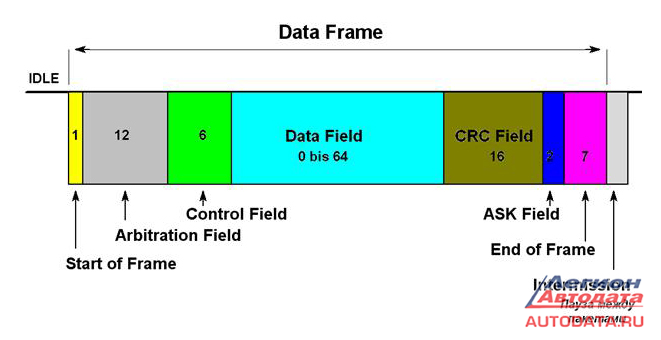
Цифры в каждом поле показывают количество битов, используемых в каждом сообщении (пакете данных).
Описание полей пакета данных Start of Frame
Маркирует начало сообщения (стартов, бит) и синхронизирует все модули шины.
Это поле состоит из идентификатора адреса в 11 бит и 1 контрольного бита и запрос (Remote Transmission Request-Bit).
Этот контрольный бит маркирует пакет как Data Frame (фрейм сообщения) или как Remote Frame (фрейм запроса) без байтов данных.
Control Field (управл. биты)
Поле управления (6 бит) содержит бит IDE (Identifier Extension Bit) для распознавания стандартного и расширенного формата, резервный бит для последующих расширений и — в последних 4 битах — количество байтов данных, заложенных в Data Field (поле данных).
Поле данных может содержать от 0 до 8 байт данных. Сообщение по шине данных CAN длиной 0 байт используется для синхронизации распределённых процессов
CRC Field (контрольное поле)
Поле CRC (Cyclic-Redundancy-Check Field) содержит 16 бит и служит для контрольного распознавания ошибок при передаче данных.
АСК Field (подтверждение приема)
Поле АСК (Acknowledgement Field) содержит сигнал квитирования всех блоков-приёмников, получивших сообщение по шине данных CAN без ошибок (квитирование — подтверждение приема, отправка квитанции — управляющее сообщение или сигнал, выдаваемые в ответ на принятое сообщение) .
End of Frame (конец фрейма)
Маркирует конец пакета данных
Интервал между двумя пакетами данных. Интервал должен составлять не менее 3 битов. После этого любой блок управления может передавать следующий пакет данных.
Если ни один блок управления не передаёт сообщений, то шина данных CAN остается в режиме покоя до передачи следующего пакета данных.
Шина данных CAN является двунаправленной шиной — любой из подключённых блоков может, как передавать, так и принимать сообщения.
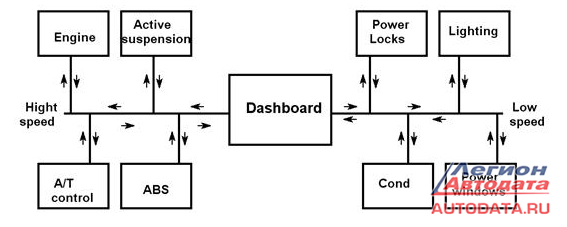
На приведенном выше рисунке слово Dashboard можно заменить на привычное (разговорное и чаще применяемое) «Шлюз».
К примеру на некоторых автомобилях, шлюзом между быстрой и медленной шиной является панель приборов (Ауди,Фольксваген), у Мерседеса функции шлюза выполняет EZS (замок зажигания), хотя сама панель работает в двух сетях, для отображения как салонной, так и моторной информации.
На следующих поколениях автомобилей с 2002 года начали использовать отдельный блок ZGW (центральный интерфейс), который выполняет функции шлюза, хранит кодировки комплектации авто и через него работает диагностика по CAN шине (именно по «чистому» CAN – без к-линий).
Читайте также: Всесезонные шины для шевроле круз
Шины данных CAN существуют с различными скоростями передачи данных и их иногда называют «быстрая шина» (High-Speed-CAN ) и «медленная шина» (Low- Speed-CAN).
Например, High-Speed-CAN – это шина двигателя, АКПП и т.п., имеет скорость передачи данных 500 Кбит
Low-Speed-CAN — это шины для управления стеклоподъемниками, кондиционером и т.п. , со скоростью передачи данных 100 Кбит.
Порядок и формат передачи и приёма сообщений пользователями определён в протоколе обмена данных.
Существенным отличительным признаком шины данных CAN по сравнению с другими шинными системами, базирующимися на принципе абонентской адресации, является соотнесённая с сообщением адресация.
- каждому сообщению по шине данных CAN присваивается его постоянный адрес (идентификатор), маркирующий содержание этого сообщения (например: температура охлаждающей жидкости).
Блок-приёмник обрабатывает только те сообщения (пакеты данных), которые сохранены в его списке принимаемых по шине данных CAN сообщений (контроль назначения сообщения).
Пакеты данных могут передаваться только в том случае, если шина данных CAN свободна (то есть, если после передачи последнего пакета данных последовал интервал в 3 бита, и никакой из блоков управления не начинает передавать сообщение). При этом логический уровень шины данных является рецессивным (логическая «1»)
Шина данных CAN: РАСШИРЕННЫЕ ВОЗМОЖНОСТИ проведения Диагностики
Так как сигналы с одного датчика (например, датчика температуры, датчика скорости и др.), может использоваться различными системами, то в том случае, если наличие неисправности отображают все использующие данный сигнал системы, неисправным является, как правило, датчик или блок управления, обрабатывающий его сигналы.
Если же сообщение о неисправности поступает только от одной системы, хотя данный сигнал используется и другими системами, то причина неисправности, в большинстве случаев, заключается в обрабатывающем этот сигнал блоке управления или сервомеханизме
Высокий уровень защиты передаваемых данных
Высокий уровень защиты передаваемых данных беспечивается даже при сильных помехах.
При этом обеспечивается высокая скорость передачи данных (до 1 Mbit/s)
За счет чего это достигается:
- Механизм обнаружения ошибок Механизм исправления ошибок
Сохранение работоспособности при высоком уровне электромагнитных помех
Распределение приоритетов команд
Помехи при передаче данных могут приводить к возникновению ошибок. Такие ошибки при передаче данных надо распознавать и устранять. Протокол шины данных CAN различает два уровня распознавания ошибок:
- механизмы на уровне Data Frame (фрейм сообщения)
на основе передаваемого по шине данных CAN сообщения модуль-передатчик рассчитывает контрольные биты, которые передаются вместе с пакетом данных в поле «CRC Field». Модуль-приёмник заново вычисляет эти контрольные биты на основе принятого по шине данных CAN сообщения и сравнивает их с контрольными битами, полученными вместе с этим сообщением.
Этот механизм проверяет структуру передаваемого фрейма, то есть перепроверяются битовые поля с заданным фиксированным форматом и длина фрейма.
Распознанные функцией Frame Check ошибки обозначаются как ошибки формата.
Механизмы на уровне битов
Каждый модуль при передаче сообщения отслеживает логический уровень шины данных CAN и на основе этого распознаёт различия между переданным и принятым битом. Благодаря этому обеспечивается надёжное распознавание глобальных и возникающих в блоке-передатчике локальных ошибок по битам.
В каждом пакете данных между полем «Start of Frame» и концом поля «CRC Field» должно быть не более 5 последовательных битов с одинаковой полярностью. После каждой последовательности из 5 одинаковых битов блок-передатчик добавляет в поток битов один бит с противоположной полярностью. Блоки- приёмники, в свою очередь, удаляют эти биты после приёма сообщения по шине данных CAN.
Механизм устранения ошибок
Если какой-либо модуль шины данных CAN распознаёт ошибку, то он прерывает текущий процесс передачи данных, отправляя сообщение об ошибке. Сообщение об ошибке состоит из 6 доминантных битов.
Благодаря этому сообщению об ошибке все подключённые к шине данных CAN блоки управления оповещаются о возникшей локальной ошибке и, соответственно, игнорируют переданное сообщение.
После короткой паузы все блоки управления снова смогут передавать сообщения по шине данных CAN, причём первым опять будет отправлено сообщение с наивысшим приоритетом (мотор, АКПП и т.п.).
Блок управления, чьё сообщение по шине данных CAN обусловило возникновение ошибки, также начинает повторную передачу своего сообщения (Automatic Repeat Request — автоматический повтор запроса).
ПРИОРИТЕТЫ шины данных CAN
Если несколько блоков управления одновременно начинают передавать сообщения, то вступает в силу « принцип приоритетности», согласно которому сообщение по шине данных CAN с наивысшим приоритетом будет передаваться первым без потери времени или битов (арбитраж доступа к шине данных) .
Каждый блок управления, утрачивающий право арбитража, автоматически переключается на приём и повторяет свою попытку отправить сообщение только после того, как шина данных CAN снова освободится.
Кроме пакетов данных существует также пакет запроса определённого сообщения по шине данных CAN. В этом случае блок управления, который может предоставить запрашиваемый пакет данных, реагирует на изданный запрос.
Для обработки данных в режиме реального времени должна быть обеспечена возможность их быстрой передачи. Это предполагает не только наличие линии с высокой физической скоростью передачи данных, но и требует также оперативного предоставления доступа к шине данных CAN, если нескольким блокам управления необходимо одновременно передать сообщения.
В целях разграничения передаваемых по шине данных CAN сообщений по степени срочности для отдельных сообщений предусмотрены различные приоритеты. Угол опережения зажигания, например, имеет очень высокий приоритет, значения пробуксовки — средний, а температура наружного воздуха — низший приоритет. Приоритет, с которым сообщение передаётся по шине данных CAN, определяет идентификатор (адрес) соответствующего сообщения.
Идентификатор, соответствующий меньшему двоичному числу, имеет более высокий приоритет, и наоборот (чем больше нулей в идентификаторе (битов нулевых) тем больше приоритет) . Протокол шины данных CAN основывается на двух логических состояниях: биты являются или «рецессивными» (логическая «1» — единица), или «доминантными» (логический «О» — ноль).
Если доминантный бит передаётся как минимум одним модулем шины, то рецессивные биты, передаваемые другими модулями, перезаписываются.
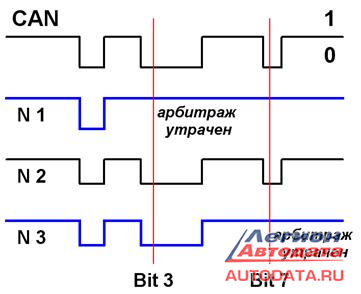
Для примера : Когда несколько блоков управления начинают одновременную передачу данных, то конфликт доступа к шине данных разрешается посредством «побитового арбитража запросов общего ресурса» с помощью соответствующих идентификаторов.
При передаче «поля идентификатора» блок-передатчик после каждого бита проверяет, обладает ли он ещё правом передачи, или уже другой блок управления передаёт по шине данных CAN сообщение с более высоким приоритетом. Если передаваемый первым блоком-передатчиком рецессивный бит перезаписывается доминантным битом другого блока- передатчика, то первый блок-передатчик утрачивает своё право передачи (арбитраж) и становится блоком-приёмником.
Первый блок управления (N 1) утрачивает арбитраж с 3-го бита.
Третий блок управления (N 3) утрачивает арбитраж с 7-го бита.
Второй блок управления (N 2) сохраняет право доступа к шине данных CAN и может передавать свое сообщение.
Другие блоки управления могут передавать свои сообщения по шине данных CAN только после того, как она освободится.
При этом право передачи опять будет предоставляться в соответствии с приоритетностью сообщения по шине данных CAN.
То есть, при использовании этого принципа «приоритетности», на шине данных CAN не должно происходить конфликта, если одновременно несколько устройств выставили различные логические уровни.
(на примере VW, Audi, Opel, Mercedes)
Шина CAN силового агрегата (быстрая шина), позволяющая передавать информацию со скоростью 500 кбит/с. Она служит для связи между блоками управления на линии двигателя и трансмиссии.
Шина CAN системы «Комфорт» (медленная шина), позволяющая передавать информацию со скоростью 100 кбит/с. Она служит для связи между блоками управления, входящими в систему «Комфорт».
Виды шин по классификации Mercedes:
Шина CAN-С – «быстрая» шина силового агрегата.
Шина CAN-B – «медленная», салонная шина «комфорт».
Шина CAN-D – диагностическая шина (используется для диагностики).
В автомобилях, имеющих диагностику по CAN шине, в качестве шлюза всех трёх шин установлен блок ZGW (центральный интерфейс). Это на более современных Мерседесах с 2002 года выпуска.
Цветовая маркировка шин на Mercedes
«Быстрая» шина силового агрегата (500 кб/сек) – зелёный и зелёный с белой полосой.
Шина «комфорт» — коричневый и коричневый с чёрной полосой.
На рисунках в различного рода руководствах и справочниках, провода шин CAN, для наглядности, могут быть обозначены приблизительно таким образом:

Общими для всех систем является следующее:
- Системы выполняют одинаковые предписания по передаче данных, сформулированные в соответствующем протоколе.
- Для передачи сигналов используются два скрученных между собой провода (Twisted Pair),которые эффективно противостоят внешним помехам (например, такая необходимость существует при их расположении в моторном отсеке).
Читайте также: От чего зависит пропускная способность системной шины
Области применения шины данных CAN
Для моторного отсека и салона применяются различные шинные системы CAN, которые отличаются друг от друга скоростью передачи данных.
Скорость передачи по шине данных CAN моторного отсека (CAN-С) составляет 500 Кбит/с, а шина данных CAN салона (CAN-B) вследствие меньшего количества особо срочных сообщений обладает гораздо меньшейскоростью передачи данных — 83 Кбит/с.
Обмен данными между обеими шинными системами осуществляется через так называемые «межсетевые шлюзы», т.е. блоки управления, подключенные к обеим шинам данных.
CAN-C (шина данных CAN моторного отсека)
В оконечном блоке управления с каждой стороны установлен так называемый согласующий резистор шины данных с сопротивлением 120 Ком, подключённый между обеими проводами шины данных.
Шина данных CAN моторного отсека активирована только при включенном зажигании.
CAN-B (шина данных CAN салона)
Некоторые блоки управления, подключённые к шине данных CAN салона, активируются независимо от включения зажигания (например, система центральной блокировки).
Поэтому шина данных салона должна находиться в режиме функциональной готовности даже при выключенном зажигании (то есть, возможность передачи пакетов данных должна быть обеспечена и при выключенном зажигании).
Для максимально возможного снижения энергопотребления в состоянии покоя шина данных CAN переходит в режим «пассивного ожидания» при отсутствии передаваемых пакетов данных и активируется снова только при последующем доступе к ней.
Если в режиме «пассивного ожидания» шины данных CAN салона какой-либо блок управления (например, потолочная блок-панель управления (N70) передаёт сообщение по шине данных CAN, то его принимает только ведущий системный модуль (например, блок управления EZS (N73)
Соответствующий ведущий блок управления сохраняет это сообщение в памяти и посылает сигнал активации («Wake-up») на все блоки управления, подключённые к шине данных CAN салона.
При выполнении активации блок управления (N73) проверяет наличие всех абонентов шины данных CAN, после чего передаёт сохранённое ранее в памяти сообщение.
Схема соединения шины CAN называется «топологией».
Или: «набор определенных правил, по которым к шине подключаются различные устройства».

Она зависит от модели конкретного автомобиля и Производителя.
Например, звездообразная топология запатентованная фирмой Daimler-Benz. Эта топология позволяет уменьшить резонансные проблемы в линии.
CAN контроллеры соединяются с помощью шины, которая имеет как минимум два провода CAN H и CAN L , по которым передаются сигналы при помощи специализированных ИМС приемо-передатчиков. Кроме того, ИМС приемо- передатчиков реализуют дополнительные сервисные функции:
- Регулировка скорости нарастания входного сигнала путем изменением тока на входе.
Встроенная схема ограничения тока защищает выходы передатчиков от повреждения при возможных замыканиях линий CAN_H и CAN_L с цепями питания , а также от кратковременного повышения напряжения на этих линиях.
Внутренняя тепловая защита.
Наиболее широкое распространение получили два типа приемоперадатчиков (трансиверов):
- «High Speed» приемопередатчики (ISO 11898-2),
Трансиверы, выполненные в соответствии со стандартом
«High-Speed» (ISO11898-2), наиболее просты, дешевы и дают возможность передавать данные со скоростью до 1 Мбит/c.
«Fault-Tolerant» приемопередатчики (не чувствительные к повреждениям на шине) позволяют построить высоконадежную малопотребляющую сеть со скоростями передачи данных не выше 125 кбит/c.
Теперь, когда мы немного ознакомились с понятием «шина данных CAN», можно коротко рассказать о том, как проводилась практическая работа по обнаружению и устранению неисправности шины данных CAN на автомобиле Mercedes ML350 рейстанлинговой модели.


Этот автомобиль попал в Россию из Америки, был привезен на продажу, дефект оказался непонятным и «плавающим»: «автомобиль может 15-20 минут работать нормально, а потом на панели загорается значок BAS ESP и отключается вся шина данных» .
Эти практические занятия проводились по учебному плану «Мастер-класс Mercedes» в компании BrainStorm, занятия проводил Дереновский Максим Васильевич (на фото вверху он слева: снимает разъем моторного блока) .
До этого момента автомобиль уже пытались ремонтировать в другой мастерской. Там поменяли «по показаниям» (?) блок BAS ESP, что не помогло устранить неисправность.
Тогда им посоветовали «прокинуть» два провода шины CAN минуя крыло автомобиля.
(Эта неисправность – гниение проводов на этом крыле и выход их из строя, является конструктивно-технологической недоработкой фирмы).
Тоже не помогло. И тогда автомобиль был доставлен на эти практические занятия с целью найти и устранить неисправность.
Для поиска неисправности применили два рекомендуемых метода:
- Проверка шины CAN по сопротивлению
Проверка по сопротивлениям
Шина представляет собой два провода витой пары.
Образно: «имеет начало и конец», которыми являются какие-либо два блока. В этих конечных блоках находятся согласующие сопротивления («терминаторы»,- разг.), номиналом 120 Ом.
- Если шина исправна и оконечные блоки подключены, то на шине мы увидим сопротивление 60 Ом (два по 120 в параллель).
Если есть обрыв на одном из конечных блоков — шина будет звониться 120 Ом, и более 120 Ом, если конечных блоков нет вообще.
Подключенные в параллель блоки мультиметром (по сопротивлению) не контролируются.
В ML350 один из конечных блоков будет моторный, второй, в зависимости от года выпуска, вероятнее всего AAM, EAM или EZS.
Определение КЗ (короткого замыкания) в шине данных CAN – определенно сложная задача. Как можно поступить:
- Визуально осмотреть провода с целью выявления и определения внешних повреждений
Расстыковать разъемы блоков управления и проверить, не погнуты ли контактные штифты в одном и втором разъеме, не попали ли туда посторонние предметы (грязь, кусочки проводов и т.д)
Одним из обучаемых было предложено начать проверку с отключения стеклоподъемников: «Он же на CAN «висит».
Неправильно. Стеклоподъемники «висят» на «медленной» шине и даже «если сильно захотят», все-равно «не положат «быструю» шину».
Начали отключать другие блоки по «быстрой» шине. Их достаточно много…
На блоке EGS (управление коробкой) , расположеный справа в ногах у водителя, было, как обычно, обнаружено масло.
Именно масло иногда является причиной неисправности этого блока.
Откуда оно там появляется – трудно сказать, но как вариант, — « согласно «эффекта каппилярности» масло из коробки поднимается по проводам и через неплотности уплотнений просачивается и на блок и вовнутрь его, привнося ошибку».
Эта ошибка конструктивная: некачественные уплотнения жгута проводов к соленоидам в коробке АКПП. По жгуту оно и поднимается в электронный блок.
Блок ААМ – тоже оказался исправным.
Кстати, если уж заговорили о нем:
- по причине «программного сбоя», у него часто «слетает» радиоканал ключей зажигания. После «перезаливки» блока работоспособность восстанавливается.
Виной «слёта» не только радиоканала , но и роллинга самих ключей , могут быть проблемы с питанием. Прокрутка двигателя на слабом аккумуляторе, плавная «посадка» АКБ на автомобиле , клеммы и т.д.
Но сама шина такой «слёт» не вызовет. Максимум сигнал разрешения запуска от блока ААМ не дойдёт до моторного и не будет включен даже стартер.
Отключение блоков тоже ничего не дало.
Проверили номера блока, которого заменили – все нормально, хотя тут тоже может быть путаница, так как существуют три варианта спецификаций для заказа:
Это достаточно важный момент, который нельзя упускать при проведении Диагностики.
Что такое «кодировки» для автомобиля:
Если просто, то это «единый язык, на котором блоки управления могут «разговаривать» между собой.
И так как автомобиль пришел из другой мастерской, а нам вообще неизвестна его история «жизни и ремонта», то проверять пришлось все кодировки.
И узнали, что в приборном щитке было прописано, что «BAS не интегрирован в ESP» .
Сделали наоборот – «BAS интегрирован в ESP», перезапустили систему управления и ошибка С1020 перестала появляться.
Какой можно сделать вывод : причиной неисправности С1020 на данном автомобиле явилась неправильно закодированная комплектация автомобиля.
Однако не стоит считать, что «ошибка по CAN» является простой и её можно быстро найти и быстро устранить.
Как говорят специалисты: «Это «головняк» и разобраться с ним можно только при отличном знании «психологии Mercedes».
Это на бумаге и в этой статье вся работа по определению неисправности уложилась в несколько строчек.
В жизни все намного труднее, сложнее и длиннее…
Информационный центр компании BrainStorm
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле