

Сегодня я хочу познакомить вас с интересной микроконтроллерной платформой CANNY. Это обзорная статья в которой вы узнаете о технологии, а в последующих статьях я расскажу вам о работе с сообщениями CAN, интеграции CANNY c Arduino Mega Server и о тех возможностях, которые предоставляет эта связка.
Почему CANNY? От названия шины CAN, которая широко используется на транспорте и, в частности, во всех современных автомобилях в качестве бортовой сети. Итак, что же можно сделать, имея специализированный контроллер, подключённый к CAN шине вашего автомобиля?
- Шина CAN
- Контроллеры CANNY
- Визуальное программирование
- Подключение
- Практические примеры
- Режим симуляции
- Заливка в контроллер
- Аналоговые входы
- Заключение по вводной статье цикла
- Реверс-инжиниринг трафика на шине CAN
- CAN-шина и альтернативы
- CAN-шина: основные принципы
- Wireless CAN
- Кратко о MOST, FlexRay и Automotive Ethernet
- Сеть в автомобиле
- Ссылки
Шина CAN
Образно говоря, шина CAN это нервная система вашего автомобиля. По ней передаётся вся информация о состоянии блоков и систем, а также управляющие команды, которые во многом определяют поведение автомобиля. Зажигание фар, открывание и закрывание дверей, управление проигрыванием музыки в салоне машины, срабатывание сигнализации и т. д. — всё это работает и управляется по этой шине.
Физически, шина CAN представляет собой два перевитых провода и очень проста в монтаже и подключении. Несмотря на свою простоту, она, благодаря своей дифференциальной природе, хорошо защищена от различных наводок и помех. Высокая надежность и большая допустимая длина сети, до 1000 метров, помогла CAN завоевать широкую популярность у производителей различного, не только автомобильного оборудования.
Контроллеры CANNY
Это целое семейство специализированных контроллеров, имеющих встроенную «родную» поддержку работы с шиной CAN. Это касается как «железной» части, так и поддержки на уровне «софта».
Флагманом линейки является контроллер CANNY 7, наиболее мощный и имеющий максимум возможностей. Большое количество памяти, мощные выходы, позволяющие напрямую управлять реле автомобиля, интеллектуальная система защиты от коротких замыканий, защита от бросков тока и напряжения в бортовой сети автомобиля — всё это делает этот контроллер отличным решением для воплощения любых ваших идей и проектов.
Кроме CANNY 7 в линейке контроллеров присутствует ещё несколько моделей, мы будем проводить свои эксперименты с более простой встраиваемой моделью CANNY 5 Nano. Она также поддерживает работу с CAN шиной, но при этом похожа на уже знакомую нам Arduino Nano.
Визуальное программирование
Развитая поддержка шины CAN это не единственная особенность этих контроллеров, кроме этого CANNY имеют свою собственную среду программирования, CannyLab, но не «обычную», а визуальную, где весь процесс написания программ сводится к манипулированию готовыми структурными блоками, заданию их параметров и соединению входов и выходов этих блоков в определённой последовательности, в соответствии с алгоритмом решаемой задачи.
Хорошо это или плохо? На мой взгляд, это дело привычки. Мне, как человеку привыкшему к «традиционному» программированию, было непривычно манипулировать блоками, вместо написания строк кода. С другой стороны, существует множество приверженцев именно такого подхода к составлению алгоритмов и считается, что для инженеров и «не программистов» это наиболее простой и доступный метод программирования микроконтроллеров.
Мне, как минимум, было «прикольно» составлять программы таким образом и через некоторое время мне это стало даже нравиться. Возможно, что если продолжить этим заниматься, то через некоторое время уже написание кода покажется неудобным.
CannyLab является бесплатной средой разработки и вы можете свободно скачать её с сайта разработчиков, она также не требует специальной процедуры инсталляции — достаточно распаковать файл с архивом — и вы можете начинать работу.
Подключение
Подключение CANNY 5 Nano к компьютеру мало чем отличается от подключения контроллеров Arduino. При наличии в системе драйвера Silicon Labs CP210x, либо после его установки из скаченного дистрибутива CannyLab, Windows создаёт виртуальный COM порт и CANNY готов к работе. В моём случае понадобилось ещё перезагрузить компьютер, но возможно это особенность моей системы.
Практические примеры
Давайте на простых примерах разберём, как в CannyLab выполнять действия, привычные нам в Arduino IDE. Начнём с традиционного мигания светодиодом.
В контроллере CANNY 5 на выводе С4 (Channel 4) присутствует тестовый светодиод (аналог светодиода, находящегося на 13 выводе в Arduino). И его тоже можно использовать для индикации и экспериментов, чем мы и воспользуемся.
Что же нужно, чтобы помигать светодиодом в контроллере CANNY? Нужно сделать всего две вещи — сконфигурировать пин четвертого канала как выход и подать на этот выход сигнал с ШИМ генератора. Все эти действия мы уже не раз проделывали в Arduino IDE, посмотрим как это выглядит в CannyLab.
Итак, конфигурируем пин четвертого канала как выход
Настраиваем генератор ШИМ. Задаём период 500 миллисекунд, заполнение — 250 миллисекунд (то есть 50 %) и 1 (true) на входе генератора «Старт» и… всё! Больше ничего делать не нужно — программа готова, осталось только залить её в контроллер.
Режим симуляции
Тут нужно сказать пару слов о процессе симуляции на компьютере работы контроллера и заливке разработанной программы в память «железного» контроллера.
Среда разработки CannyLab позволяет запускать и отлаживать программу, не записывая её в память контроллера. В режиме симуляции вы можете видеть результат работы программы прямо в реальном времени и даже вмешиваться в её работу.
Заливка в контроллер
Для работы контроллеров CANNY, перед заливкой программы (в терминологии разработчиков «диаграммы») нужно сначала залить операционную систему «Устройство/Системное ПО/Записать». Это нужно сделать только один раз, для этого нужно выбрать соответствующий вашему контроллеру файл с расширением .ccx.
После того, как программа написана и отлажена, её можно загрузить в ваш контроллер. Это делается просто — в меню выбираете пункт «Устройство/Диаграмма/Записать» и через несколько секунд программа оказывается записанной в контроллер.
Далее нужно отключить контроллер от USB порта компьютера, снять перемычку на плате и можно включать запрограммированный контроллер, который после включения будет работать по вашей программе.
Аналоговые входы
Для того, чтобы лучше понять принцип программирования контроллеров CANNY в среде разработке CannyLab, давайте ещё разберём пример работы с аналоговым входом в этой системе.
Мы будем отслеживать уровень напряжения на 10 пине контроллера и если он находится в диапазоне 2,5 В ± 20%, будем зажигать встроенный в плату светодиод.
Читайте также: Чем помыть шины автомобиля
Как и в предыдущем примере, конфигурируем 4-й пин как выход для того, чтобы иметь возможность управлять работой светодиода.
Включаем АЦП на 10-м канале.
Далее пользуемся двумя логическими блоками, которые выдают 1 на выход, если напряжение находится в заданном диапазоне. Полный диапазон от 0 до 4095.
Блок «Логическое И» довершает работу и со своего выхода управляет работой светодиода на плате.
Вот и всё. То, что мы привычно делали на Arduino, мы легко сделали в CannyLab. Осталось только освоиться в этой среде программирования и вы сможете легко и непринуждённо создавать свои проекты на этой платформе.
Эти простые примеры составления программ даны для того, чтобы вы могли понять принцип визуального программирования микроконтроллеров CANNY. В дальнейшей работе вам поможет отличная справочная документация и поддержка разработчиков на сайте и форуме системы.
Заключение по вводной статье цикла
Подключив контроллер CANNY к своему автомобилю вы сможете реализовать множество интересных и уникальных идей, например, нестандартную сигнализацию, которую не так то легко будет вскрыть (в силу её нестандартности) или добавите новые функции, о которых мечтали, но не надеялись, что это возможно реализовать на практике.
Если вам нравится визуальное программирование в стиле CannyLab, то контроллеры CANNY могут стать для вас интересной альтернативой Arduino или работать в связке с контроллерами Arduino. Об этом мы поговорим во второй статье цикла, в которой я расскажу вам об интеграции контроллеров CANNY с системой Arduino Mega Server.
Напомню, что AMS теперь работает не только на платах Arduino, но и на беспроводных Wi-Fi модулях ESP8266 и именно о такой связке пойдёт речь в следующий раз.
И как обычно, оставайтесь с нами, будет интересно!
Реверс-инжиниринг трафика на шине CAN
Необработанный сигнал шины CAN
Шина CAN (Controller Area Network) стала стандартом в автомобилестроении: все новые автомобили обязаны поддерживать CAN (с 2001 в Европе и с 2008 в США). Кроме автомобилей, CAN применяется и в широком ряде других устройств. Производители диагностического оборудования для CAN рекламируют его применение, кроме разнообразной автомобильной техники, в мотоциклах, автопогрузчиках, судах, шахтных поездах, батискафах, беспилотных самолетах и пр. Давайте разберемся, что из себя представляет CAN.
В автомобилях используется несколько CAN; например, в Ford Focus таких шин четыре — три высокоскоростных (500 kbps) для управления мотором, тормозами, приборной панелью и т.п., и одна низкоскоростная (125 kbps) для управления дверьми, фарами, подушками безопасности, аудиосистемой, кондиционером и всем прочим. Подключившись к CAN, можно имитировать сигналы от любых устройств в автомобиле — например, управлять кондиционером с приложения на телефоне или накручивать одометр без движения автомобиля. Подключив к шине Arduino и реле, можно управлять с приборной панели дополнительной парковочной камерой. Даже стартапы, работающие над беспилотными автомобилями, такие как Voyage, начинают создание прототипа с того, что в обычном серийном автомобиле подключаются к CAN и учатся имитировать сигналы от педалей и руля.
Для подключения к CAN в автомобиле обычно возле руля имеется разъем OBD-II (On-Board Diagnostics).

Адаптеры OBD2-USB для подключения компьютера к CAN стоят от $5, и позволяют отслеживать весь трафик внутри автомобиля. Иногда разъем OBD-II защищен «аппаратным фаерволом», позволяющим принимать пакеты от устройств, подключенных к CAN, но не позволяющим передавать пакеты обратно на шину. В этом случае достаточно вывинтить разъем, и подключиться к проводам CAN вместо него.

Каждый пакет, передаваемый по шине CAN, состоит из ID передающего устройства (11 либо 29 бит), и до 8 байт передаваемых данных. Трафик, проходящий по шине при включении зажигания, может выглядеть как-то так:
Для анализа трафика CAN существует большое число инструментов — как коммерческих, так и OpenSource. Пакет can-utils для Linux включает утилиту cansniffer , которая отображает для каждого CAN ID только последний отправленный пакет, и тем самым позволяет отслеживать изменения показаний каждого датчика на шине:
Для реверс-инжиниринга трафика CAN сингапурские исследователи, из доклада которых я взял этот трейс, записали на видео приборную доску подопытного автомобиля, и затем соотнесли изменения на приборной доске с одновременными изменениями в трафике. Определив таким образом CAN ID датчика скорости и формат передаваемых им данных, они научились «подделывать» его пакеты, передавая на спидометр и на тахометр показания, не соответствующие действительности.
Надо понимать, что параллельно с передачей «поддельных» пакетов по шине продолжают передаваться и настоящие сигналы от датчика скорости. Чтобы тахометр показывал сфабрикованные показания, надо отслеживать передачу по шине настоящих показаний, и каким-либо образом их подавлять — например, сразу после обнаружения передачи CAN ID датчика скорости физически «глушить» шину, закорачивая линии данных. Более простой, чисто программный метод подавления настоящих показаний — сразу же после их передачи, пока тахометр еще не успел отреагировать, передавать «поддельные» пакеты. Например, следующий простой шелл-скрипт отслеживает передачу с CAN и сразу же после нее передает сфабрикованный пакет при помощи утилиты cansend из состава все тех же can-utils:
Даже хотя все устройства в автомобиле подключены к CAN, далеко не все их функции управляются через CAN. Например, на CAN в Ford Escape передаются сигналы о степени нажатия педалей газа и тормоза — но используются эти сигналы только блоком ABS, тогда как приводы дроссельной заслонки и тормозов соединены с педалями напрямую, минуя CAN.
C точки зрения безопасности ни о какой уязвимости в докладе сингапурцев речи не идет, потому что для передачи «поддельных» CAN-пакетов нужен физический доступ к шине. Кроме того, пакеты могут быть защищены контрольной суммой — например, в автомобилях Toyota последний байт каждого пакета должен равняться сумме всех предыдущих (по модулю 256). Кроме этого, в Toyota для защиты от нежелательных пакетов используется фильтрация получателем — например, игнорируются повороты руля более чем на 5% от текущего значения.
Тем не менее исследователям безопасности удавалось получить к CAN и удаленный доступ: вначале на небольшом расстоянии — через уязвимости в Bluetooth-модуле, подключенном к той же самой шине; а затем через сотовую сеть Sprint, через которую внедорожники нескольких американских производителей получали данные о пробках на дорогах. Исследователи, продемонстрировавшие перехват управления Jeep Cherokee с расстояния в несколько миль, получили от Управления перспективных исследовательских проектов Министерства обороны США (DARPA) вознаграждение в 80 тысяч долларов. С тех пор многие автопроизводители объявили о собственных bounty-программах, обещающих выплаты от $1500 за каждую обнаруженную уязвимость. Таким образом, реверс-инжиниринг трафика на шине CAN может не только добавить вашему автомобилю новые возможности, но и существенно пополнить ваш кошелек.
Читайте также: Давление в шинах уаз 330365
CAN-шина и альтернативы
CAN (Controller Area Network) в настоящее время является наиболее широко используемой автомобильной бортовой сетью. Однако в связи с постоянным развитием автономных транспортных средств и связанных с ними технологий существует высокий спрос на большую пропускную способность и возможности подключения. Здесь мы кратко опишем CAN и некоторые другие варианты подключения транспортных средств, включая беспроводную CAN, MOST, FlexRay и Automotive Ethernet.
CAN-шина: основные принципы
В широком смысле CAN-шина (Controller Area Network) на самом деле представляет собой набор стандартов, которые позволяют различным устройствам обмениваться данными друг с другом. Это асинхронная (со сдвигом по времени) система последовательной шины, разработанная в 1983 году компанией Robert Bosch GmbH с целью объединения электронных блоков управления (ECU) в транспортных средствах.
CAN был разделен на несколько уровней в соответствии с моделью ISO/OSI для достижения гибкости и прозрачности дизайна. Для практической связи CAN-шина использует два выделенных провода: CAN low и CAN high, с помощью которых контроллер CAN подключается ко всем компонентам сети. CAN позволяет заменить довольно сложную разводку на двухпроводную шину. CAN использует дифференциальный сигнал, что делает его более устойчивым к помехам, с двумя логическими состояниями: рецессивным и доминантным. В настоящее время шина CAN используется практически везде, от кофемашин до управления автопарком и космических приложений. Далее мы кратко опишем принципы работы CAN-шины.
Протокол связи CAN ISO-11898: 2003 объясняет, как информация передается между устройствами в сети, на основе модели взаимодействия открытых систем (OSI), представленной в виде набора уровней на рисунке ниже. Два нижних уровня семиуровневой модели OSI/ISO — это физический уровень и уровень канала передачи данных. Физический уровень определяет связь между устройствами, соединенными физической средой.
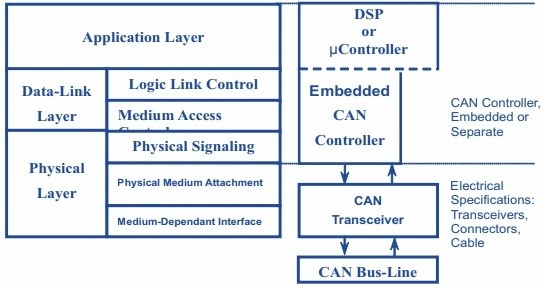
Канальный уровень, помимо прочего, также занимается организацией битов в фреймы и включает два протокола: классический CAN (первое использование датировано 1988 годом) и CAN FD (запущено в 2012 году).
Прикладной уровень — это, по сути, уровень конечного пользователя, обеспечивающий доступ к сетевым ресурсам. Существует два типа форматов сообщений/фреймов: стандартные и расширенные. Они отличаются друг от друга только длиной идентификатора — стандартный — 11 бит, расширенный — 29 бит.
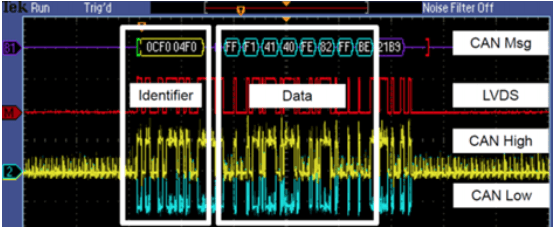
Стандартная структура сообщения может быть разделена на 8 частей, как показано на рисунке ниже. Этими частями являются: Start of Frame (SOF — начало передачи фрейма), CAN-ID (идентификатор фрейма, идентификация приоритета сообщения), Remote Transmission Request (RTR, указывает, запрашивает ли узел данные у другого узла или отправляет данные), Control (отображает длину данных в байтах), Data (фактические значения данных, которые необходимо для масштабировать/преобразовывать), Cyclic Redundancy Check (CRC, обеспечение целостности данных), ACK (подтверждение, указывает, правильно ли получены данные) и EOF (конец фрейма), который обозначает конец сообщения/фрейма CAN.
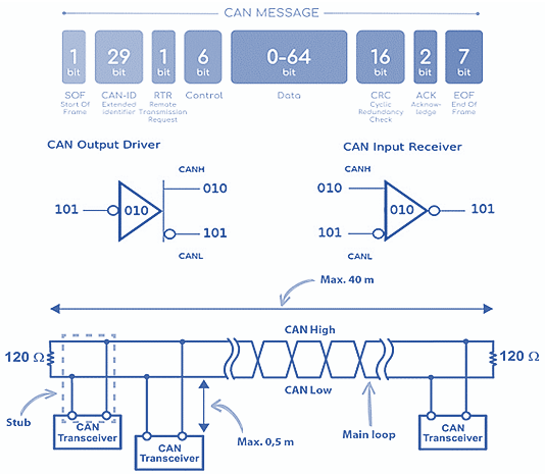
В шине CAN используется инвертированная логика с двумя состояниями: доминантным и рецессивным. На рисунке выше показана упрощенная схема ввода-вывода трансивера CAN: битовый поток, идущий к/от CAN-контроллера и/или микроконтроллера. Когда контроллер отправляет поток битов, они дополняются и помещаются в линию CANH.
Линия CANL всегда является дополнением CANH. CAN должен контролировать как то, что в данный момент находится на шине, так и то, что она отправляет. Для приложений оба конца CAN-шины должны быть ограничены, поскольку любой узел на шине может передавать данные.
На каждом конце линии есть согласующий резистор, равный характеристическому сопротивлению кабеля. Обычно рекомендуемое значение оконечных резисторов составляет 120 Ом (в диапазоне от 100 Ом до 130 Ом). В сети должно быть не более двух согласующих резисторов, поскольку дополнительные ограничительные устройства создают дополнительную нагрузку на драйверы.
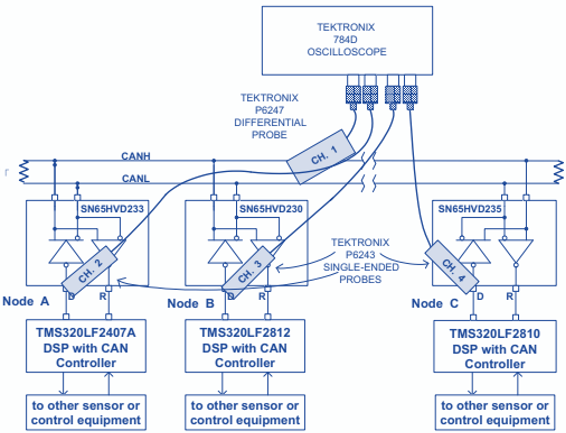
На рисунке ниже показана тестовая шина CAN. Узлы на рисунке в принципе могут отправлять сообщения от интеллектуальной сенсорной технологии и контроллера двигателя. Типичным применением может быть, например, датчик температуры.
Если другому узлу необходимо одновременно отправить сообщение, арбитраж гарантирует, что сообщение отправлено. Например, узел A завершает отправку своего сообщения, поскольку узлы B и C подтверждают получение правильного сообщения. Узлы B и C в свою очередь начинают арбитраж, и если узел C выигрывает арбитраж, он отправляет сообщение. Узлы A и B подтверждают сообщение от узла C, и узел B затем продолжает свое сообщение.
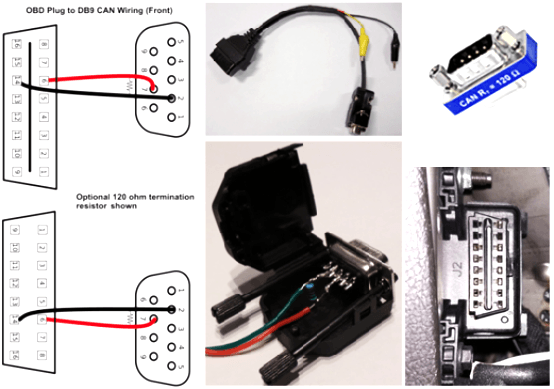
Следует помнить о противоположной полярности входа и выхода драйвера на шине. CAN-шина в наши дни широко распространена в автомобилях. Он присутствует практически во всех производимых автомобилях. Автомобили в современном мире по сути являются продуктом глобального рынка, поэтому все автомобили, как правило, имеют шину CAN. Доступ к шине CAN осуществляется через порт OBD, который показан на рисунке ниже вместе с примером оконечного резистора 120 Ом, припаянного к разъему DB9 с проводкой CAN, расположенной в корпусе DB9.
Для подключения порта OBD к устройству CAN DB9 необходим кабель, который можно купить или изготовить. Чтобы получить самодельный, необходимы 9-контактное гнездо D-sub (розетка) и штекер OBD (вилка). Разъем DB9 должен соответствовать вилке устройства CAN.
Пример подключения OBD к DB9 CAN, включая дополнительный оконечный резистор, также показан на схемах ниже.
Существует множество вариантов построения сенсорной сети, интерфейса с шиной CAN и просмотра сигналов CAN от транспортных средств. Различные микроконтроллеры в настоящее время поддерживают протокол CAN и могут быть подключены к CAN через чип приемопередатчика CAN.
Также существуют такие решения, как Raspberry Pi, Texas Instruments Launchpad и Arduino, которые могут взаимодействовать с CAN с помощью некоторых надстроек. Сеть связи CAN в современных транспортных средствах может предоставлять огромный объем данных, которые можно использовать в управлении автопарком для повышения безопасности водителя, сокращения общих расходов, улучшения процессов обслуживания и поддержки экологической ответственности.
Читайте также: Глубина протектора зимних шин suv
Включение данных шины CAN предоставляет владельцам автопарков широкие возможности для доступа к различной информации, включая расход топлива, показания одометра, обороты в минуту, положение дроссельной заслонки, нагрузку/крутящий момент двигателя, температуру двигателя и уровень топлива.
CAN в настоящее время является наиболее широко используемой автомобильной сетью. Однако в связи с постоянным развитием автономных транспортных средств и связанных с ними технологий существует высокий спрос на большую пропускную способность и возможности подключения. Далее мы кратко опишем некоторые другие варианты подключения к автомобилю, включая беспроводную CAN, MOST, FlexRay и Automotive Ethernet.
Wireless CAN
CAN на витой паре медных проводов стал стандартом ISO в 1994 году. Растущий спрос на расширенные возможности подключения приводит к развитию альтернативных и дополнительных технологий. Например, некоторые варианты беспроводной передачи CAN полагаются на стандарты радиосвязи на основе протокола, такие как WLAN или Bluetooth.
В таком случае данные CAN в передатчике должны быть преобразованы в беспроводной протокол и сброшены в приемнике. Таким образом, прозрачная передача в реальном времени по сети CAN невозможна. Таким образом, радиосвязь функционирует как шлюз между двумя сетями CAN.
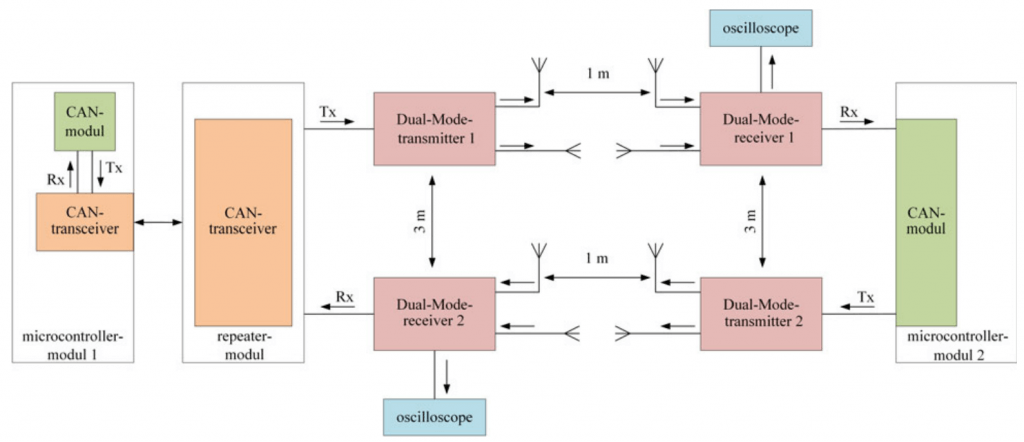
Беспроводная CAN, основанная на двухрежимном радио, позволяет участникам CAN без проводов интегрироваться в сеть CAN, повышая безопасность и удобство использования. Однако для такой системы требуются специальные антенны, которые требуют места и определенного расположения, ограничивающего всенаправленное излучение.
Кратко о MOST, FlexRay и Automotive Ethernet
Многообещающей альтернативой CAN являетсяAutomotive Ethernet. По некоторым оценкам, рынок автомобильных сетей Ethernet вырастет более чем на 21,6% в прогнозный период 2019-2026 годов.
Ключевые преимущества Ethernet для подключения транспортных средств — высокая пропускная способность и экономическая эффективность. Ethernet использует Carrier Sense Multiple Access и Collision Detection (CSMA/CD). Collision можно игнорировать посредством разделения в автомобильных сетях. Некоторые проблемы автомобильной сети Ethernet — это значительный уровень радиочастотного шума, неспособность обеспечить задержку вплоть до диапазона малых микросекунд и отсутствие способа синхронизации времени между устройствами.
MOST (Media Oriented System Transport) — это система последовательной связи для передачи управляющих данных, видео и аудио по оптоволоконным кабелям. Она обеспечивает двухточечный обмен звуковой и видео информацией со скоростью 24,8 Мбит/с. MOST создается ассоциацией MOST и определяет уровни протокола, программного и аппаратного обеспечения, необходимые для обеспечения эффективной и недорогой транспортировки управляющих данных в реальном времени и пакетных данных с использованием единого промежуточного/физического уровня. Сеть MOST может быть схематично представлена в виде кольца, которое может включать до 64 устройств MOST. Благодаря функции plug & play добавление или удаление устройства MOST должно быть довольно простым.
FlexRay, в свою очередь, является стандартом автомобильной сети, основанным на гибкой, детерминированной, отказоустойчивой и высокоскоростной шине с высокой скоростью передачи данных. Он используется как часть звездообразной или линейной топологии с медным или оптическим волокном. FlexRay с двухканальной конфигурацией обеспечивает повышенную отказоустойчивость и/или увеличенную пропускную способность. Сетевые особенности FlexRay делают его удобным для автомобильной промышленности следующего поколения.
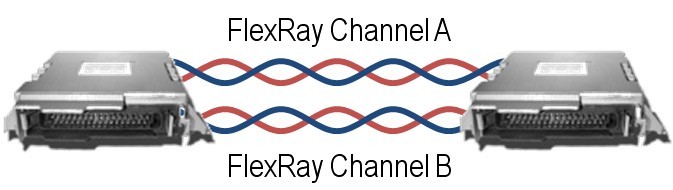
Большинство сетей FlexRay первого поколения обычно используют один канал для сокращения затрат на проводку, но дальнейшее развитие приложений и связанные с этим требования безопасности приведут к увеличению использования двух каналов. Ограничивающими факторами для широкого использования FlexRay являются цена, более низкие уровни рабочего напряжения и асимметрия фронтов, что приводит к проблемам при увеличении длины сети. Некоторые ключевые особенности перечисленных протоколов по сравнению с характеристиками CAN представлены в таблице ниже.
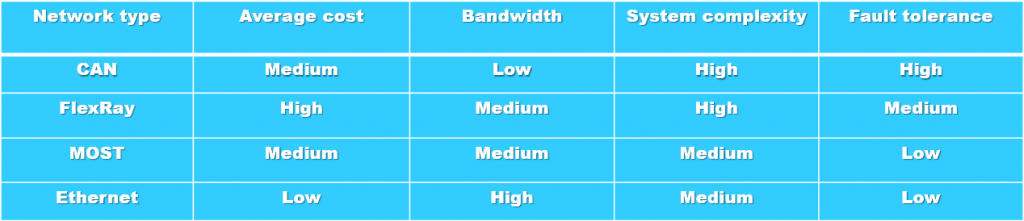
Прямое сравнение перечисленных протоколов связи показывает, что пропускная способность и отказоустойчивость явно уступают средним затратам и сложности системы. В то время как CAN и MOST остаются своего рода фундаментальными протоколами, FlexRay и Ethernet являются более многообещающим решением для удовлетворения растущего рынка и требований приложений с высокой нагрузкой. В современных автомобилях эти протоколы часто используются в качестве дополнительных решений.
Сеть в автомобиле
CAN-шина действительно является хорошо известным и признанным стандартом подключения транспортных средств. Он соединен с силовым агрегатом, шасси, магистральной сетью и системами кузова. Для практической связи CAN-шина использует два выделенных провода: CAN low и CAN high, с помощью которых контроллер CAN подключается к различным компонентам сети. Ethernet, в свою очередь, обычно используется в качестве диагностического протокола для блоков управления электронными соединениями двигателя, шасси и кузова, используемых для сетевых соединений.
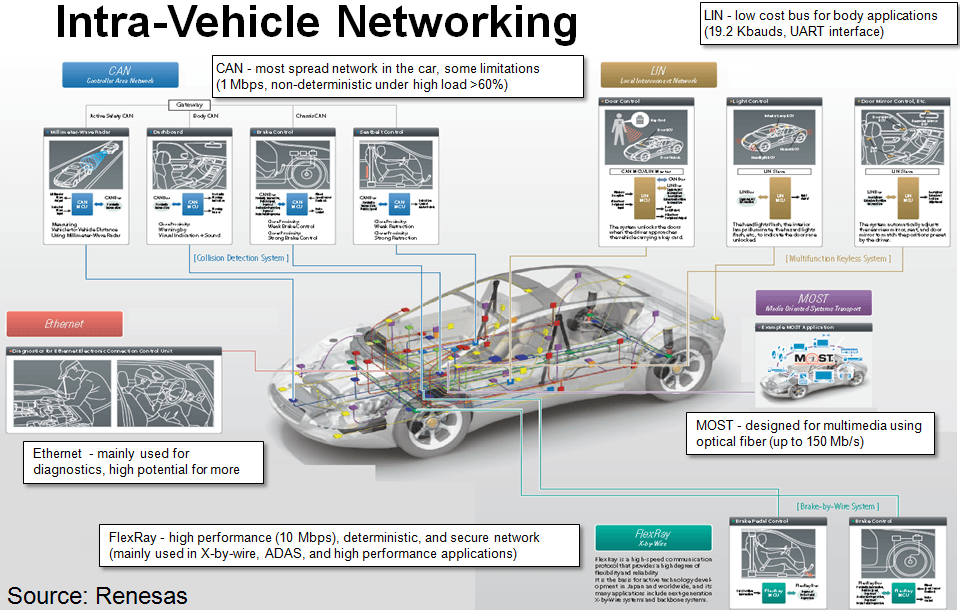
FlexRay в настоящее время составляет основу для активной разработки технологий во всем мире, и его многочисленные приложения включают системы X-by-Wire нового поколения и магистральные системы. MOST — это стандарт шины для автомобильных мультимедийных сетей, предназначенный для передачи высококачественного звука, видео и данных. Он позволяет легко соединять различные мультимедийные компоненты автомобиля.
Все вышеупомянутые протоколы и технологии удовлетворяют большинству требований диагностики и мультимедийной связи для современных транспортных средств и связи между транспортными средствами и могут использоваться для продвинутых автономных систем вождения, однако точная интеграция всех этих технологий, при соблюдении все ограничений, по-прежнему остается сложной задачей.
Ссылки
2) Introduction to the Controller Area Network (CAN), Texas Instruments, 2016.
15) Controller Area Network (CAN) Bus J1939 Data Acquisition Methods and Parameter Accuracy Assessment Using Nebraska Tractor Test Laboratory Data by Samuel E. Marx. 2015.
17) Ankita Sawant et al., CAN, FlexRay, MOST versus Ethernet for Vehicular Networks. IJIACS 2018.
18) Shane Tuohy et al., Next Generation Wired Intra-Vehicle Networks, A Review. 2013 IEEE Intelligent Vehicles Symposium (IV).
19) Aroosa Umair, Muhammad Gufran Khan. Communication Technologies and Network Protocols of Automotive Systems. 2018.
20) Peter Hank et al., Automotive Ethernet: In-vehicle Networking and
Smart Mobility. 2013.
21) Felix Huening et al., Wireless CAN without WLAN or Bluetooth Wireless CAN without WLAN or Bluetooth. 2018.
26) Nicolas Navet, Françoise Simonot-Lion. In-vehicle communication networks — a historical perspective and review. 2013
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле