Решил написать некое руководство о том, как настроить арминг коптера через переключатель.
Зачем написал?
Некоторые считают неудобным армить коптер переключателем. Почему? Наверно разные причины. Не суть.
В настройке есть некоторые нюансы, но в итоге это очень удобно и безопасно.
Но у арминга переключателем тоже есть свои подводные камни.
Преимущества арминга переключателем
- Можно очень быстро задизармить коптер
- Возможно не боясь убирать газ в 0 в полёте
- Можно дизармить коптер зависнув в нескольких сантиметрах от земли
- А можно дизармить и просто убрав газ в 0 (разъяснение будет ниже)
- Ну и это просто прикольно
- В полёте можно случайно перепутать переключатель и задизармить коптер.
- На земле можно случайно задеть переключатель рукой (диваном. чем угодно) и коптер неожиданно заармится.
Решение проблем
Решаются выше описанные проблемы двумя переключателями. Я использую на моей Турниге Throttle Cut и Rudder D/R переключатели. Они находятся слева на торце аппаратуры.
Суть логики работы двух переключателей заключается в следующем. Сокращенно назовём их Трл и Руд.
- Трл и Руд выключены — коптер задизармен, Канал газа -100 не зависимо от положения ручки газа (режим ARM не активен)
- Трл или Руд включен — Коптер задизармен, но канал газа теперь реагирует на ручку газа (режим ARM не активен)
- Трл и Руд оба включены — коптер заармлен (режим ARM активирован)
В настройках коптера параметер disarm_kill_switch выключен:
Что это нам даёт?
Во первых теперь, у нас есть двойная защита от несанкционированного арминга (коптер заармится только если оба переключателя включены).
Другая полезная функция — это очень простой и безопасный дизарминг коптера в нескольких сантиметрах от земли.
Как я пользуюсь этим функционалом?
- Для того чтобы взлететь, я включаю оба переключателя и в путь!
- Теперь, даже если я случайно задену один из переключателей, хотя и будет послан сигнал выключения режима ARM, но коптер будет продолжать лететь, так как газ не убран в ноль.
- Если я планирую приземлиться, я, находясь ещё в воздухе, выключаю один из переключателей и продолжаю лететь к месту посадки. Выхожу на минимальную высоту и. просто убераю газ в 0. Коптер задизармился и мягко плюхнулся на землю. Перед тем как взять коптер, выключаю второй переключатель.
- Чтобы задизармить коптер в экстренном случае (не зависимо от ручки газа), я просто ладонью «бью» по обоим переключателям.
Эта настройка уже прошла испытание «боем» и для меня на сегодняшний день это наилучший способ арминга коптера.
Позже, если будет кому интересно, могу показать как настроить пульт на такую логику с прошивкой Er9x. Да и на OpenTX это настраивается аналогично.
Обновлено 17.06.2016 в 15:40 [ARG:5 UNDEFINED]
- Арминг
- Что такое арминг? [править]
- Способы арминга/дизарминга [править]
- Арминг стиками на пульте [править]
- Арминг переключателем [править]
- Арминг двумя переключателями [править]
- Vertol
- Запускаем моторы (арминг / дизарминг)
- Не запускается квадрокоптер? Исправляем проблемы
- Основные проверки
- Как проверить проблему арминга в Betaflight
- Betaflight Configurator
- Пищалка (Buzzer beeper)
- Таблица для поиска проблем с запуском квадрокоптера посредством сравнения числа из Arming flag
- Другие проблемы
- Акселерометр
- Большая загрузка процессора
- Газ, он же Throttle, он же дроссельная заслонка
- Порог Морона
- 📺 Видео
Видео:Почему моторы набирают обороты при арме? Почему при посадке дрон прыгает/скачет?Скачать

Арминг
Видео:Айнав не армится, что делать? INAV 2.6 armingСкачать

Что такое арминг? [править]

А́рминг (от англ. arming или arm) — процедура «разблокировки» моторов коптера (дословно — «вооружение», перевод коптера в боевое состояние) перед полётом, после которой коптер начинает реагировать на движение стика газа, а некоторые полётные контроллеры сразу запускают моторы на минимальном («холостом») газе. Лететь коптер может только в состоянии armed, в таком случае говорят, что коптер заа́рмили.
Обратная армингу процедура — диза́рминг (от англ. disarming или disarm), разоружение, безусловное выключение моторов. Дизарминг предназначен для обеспечения безопасности включения питания борта и пульта управления, чтобы случайно оказавшийся не в нулевом положении стик газа не привёл к неожиданному для пилоту включению моторов ЛА, которое может привести к механическим повреждениям или травмам людей.
Многие полётные контроллеры переходят в состояние disarmed если некоторое время (несколько секунд) стик газа находится в нуле. Считается, что если коптер был заармлен, но не взлетел в течение нескольких секунд, то это значит, что пилот отвлёкся на что-то и может забыть о вооружённом состоянии коптера, что опасно последствиями.
После включения питания большинство коптеров находится в состоянии disarmed — «разоружён», не готов к полёту, перемещение стика газа не приводит к запуску моторов.
Большинство полётных контроллеров отображают состояние armed/disarmed цветом или миганием светодиодов, некоторые — звуковыми сигналами.
Читайте также: Мотор для лодки в хорошем состоянии
Видео:Betaflight не армится, что делать? arming, arm, армингСкачать

Способы арминга/дизарминга [править]
Арминг стиками на пульте [править]
Как правило, арминг/дизарминг осуществляется удерживанием в течение некоторого времени (единицы секунд) одного или комбинации двух стиков пульта управления в определённом особом положении, которое с одной стороны трудно воспроизвести самопроизвольно, а с другой стороны — заставляет принудительно перевести перед включением моторов стик газа в нулевое положение.
Какая именно комбинация стиков а́рмит коптер — зависит от типа его полётного контроллера, или, если быть точнее — от прошивки полётного контроллера. Нужно смотреть в инструкции к конкретному полётному контроллеру и его прошивке.
Некоторые полётные контроллеры (например те, что стоят в коптерах WLToys) совмещают арминг с процедурой калибровки стика газа (в некоторых случаях — и всех остальных стиков аналогично), когда стик газа нужно сначала перевести в максимальное положение, а затем в минимальное.
Арминг переключателем [править]
Некоторые пилоты считают удобным армить коптер переключателем (ряд полётных контроллеров имеют такую возможность настройки).
Преимущества арминга переключателем:
- Можно очень быстро задизармить коптер (в то время как при дизарминге стиками, как правило, требуется удержание их в определённой комбинации в течение нескольких секунд, а это может быть слишком долго и чревато последствиями в чрезвычайных ситуациях даже при холостом ходе).
- Можно без опаски убирать газ в 0 в полёте (важно при акробатическом пилотировании гоночного FPV-миникоптера, когда может быть ошибочно воспроизведена комбинация стиков дизарма, либо может сработать таймер дизарма при нулевом газе).
- Можно дизармить коптер при посадке, зависнув в нескольких сантиметрах от земли (полезно для коптеров, не имеющих шасси: коптер при посадке может касаться вращающимися пропеллерами земли, травы и других препятствий, поэтому лучше если при этом моторы будут выключены).
Недостатки арминга переключателем:
- В полёте можно случайно перепутать переключатель (например, с переключателем режима) и задизармить коптер, что естественно приведёт к падению.
- На земле можно случайно задеть (или забыть поставить в правильное положение) переключатель — и коптер неожиданно заармится.
Арминг двумя переключателями [править]
Оба недостатка арминга переключателем можно решить использованием двух переключателей. Один из них должен контролировать арминг полётного контроллера, а другой — блокировать канал газа внутри пульта аппаратуры радиоуправления, когда при любом положении ручки газа на контроллер передаётся нулевой газ (-100%). См. подробнее пример настройки арминга переключателями в CleanFlight.
Видео:Как настроить быстрое отключение моторов на DJI AVATA \ Arm + Disarm AvataСкачать

Vertol
Запускаем моторы (арминг / дизарминг)
Оценить эту запись
После подключения регуляторов и приёмника к плате контроллера, возникает следующее желание — проверить работу.
Для этого надо будет немного подредактировать файлы конфигурации перед заливкой прошивки в память контроллера.
Очень рекомендую перед всеми дальнейшими действиями снять винты с моторов (если они уже установлены).
Также перед началом редактирования некоторых строк рекомендую воспользоваться GUI для MultiWii, с целью убедиться что все соединения сделаны верно, в программе видна «синхронная» с наклонами платы работа авиагоризонта (наклоны по крену и тангажу совпадают с манипулированиями платой полётного контроллера).
Но самое важное на этом этапе — запомнить(записать) значения индикатора газа которое отображается при крайних положениях стика, эти цифры нужны для редактирования файла прошивки.
В программе Arduino открываем файлы свежескачанной прошивки, переходим на вкладку config.h
и начинаем активировать строки (снимаем REM блокировку в виде //)
в разделе SECTION 1 — BASIC SETUP
открываем строку которая указывает тип вашей рамы (в моём случае Х).
//#define QUADP
#define QUADX
//#define Y4
далее переходим к Motor minthrottle и Motor maxthrottle
проверяем/редактируем значения минимальных и максимальных оборотов под свои регуляторы.
следующий пунктик Mincommand (требует уточнения)
в нём устанавливается параметр/значение команды которое подаётся на регуляторы при «холостом ходе», т.е. с каких значений моторы начнут работать после арминга (подбирается под свои нужды экспериментально).
Если после редактирования этих строк запустить программу на заливку в плату контроллера, то моторы начнут работать именно на этих МИНИМАЛЬНЫХ оборотах, помните о предупреждении на тему СНИМАЙТЕ ВИНТЫ перед прошивкой ?.
Если вы поленитесь/забудете это сделать то вариантов много, начиная от «получить по пальцам», и заканчивая «да ладно разбитый телевизор ! где бинт и йод . «.
Читайте также: Как заводится лодочный мотор ветерок 12
Плюс у этой платы довольно хлипенький тип разъёма USB — он может быть повреждён даже неаккуратными манипуляциями при подключении/отсоединении (+порвать при отрыве токоведущие дорожки на плате, а это тоже «малоинтересно»).
Продолжаем.
Ниже (в файле config.h)находим строку boards and sensor definitions, для контроллера который упомянут мной в самом начале необходимо открыть строку
#define CRIUS_AIO_PRO_V1
Конечно далее есть ещё много «вкусняшек», но их пока открывать не будем.
Переходим к вкладке MultiWii
находим там строку rc functions
и выставляем свои значения (те которые выдавал GUI при крайних положениях газа), причём выставляем их с некоторой поправкой.
в моём случае было так — значения были в диапазоне от 1050 до 1878, моторы стали армиться при указанных
#define MINCHECK 1100
#define MAXCHECK 1850
некоторые пояснения по этим моментам можно прочитать в блоге у mataor
использование именно этого поста помогло мне «запуститься».
По большому счёту кое -что уже сделано (но не обольщайтесь на тему «и всё?» )
Теперь можно сохранить сделанные изменения, и затем прошить контроллер тем что «наредактировали». (всё в программе Arduino)
По крайней мере если вы всё сделали правильно — ваш коптер уже начнёт отзываться запуском моторов (и их блокировкой).
Арминг проводят перемещением стика газа вниз и вправо.
Дизарминг — стик газа вниз и влево.
Это для для пульта Mode-2.
Видео:Betaflight - настройка регуляторовСкачать

Не запускается квадрокоптер? Исправляем проблемы
В этой статье вы узнаете, что делать, если квадрокоптер не запускается (не запускает двигатели, не армится), а также, обсудим основные проблемы, которые могут возникать при снятии с охраны квадрокоптера.
Видео:При арминге не запускаются и не крутятся моторы APM2.8 Pixhawk Vlog#31Скачать

Основные проверки
Для идентификации проблемы, нужно выполнить ряд проверок:
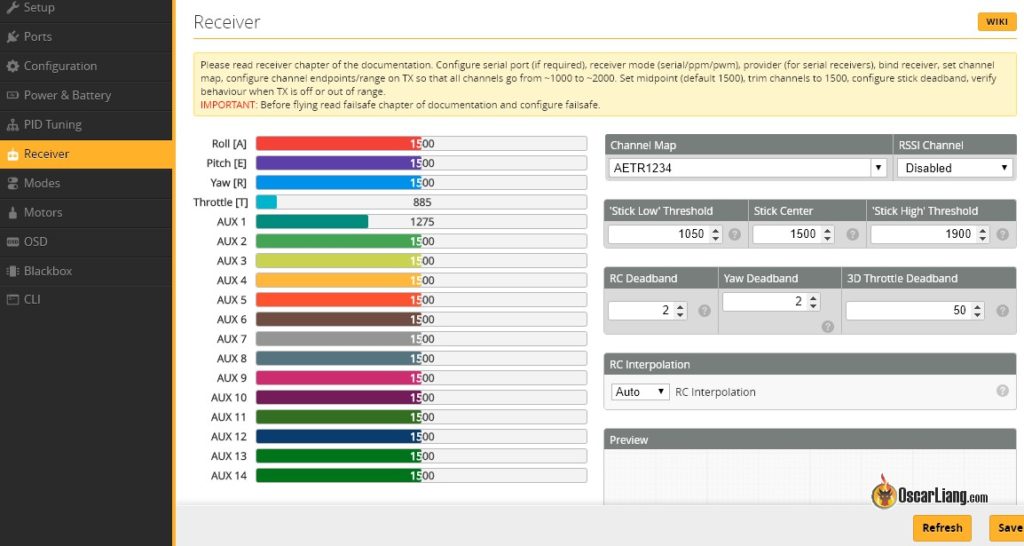
- Проверить, корректно ли работает приемник. Для этого нужно зайти в Betaflight во вкладку «Receiver» и подвигать стики пульта — каждое движение должно правильно отображаться на графике (должны двигаться полоски состояния).
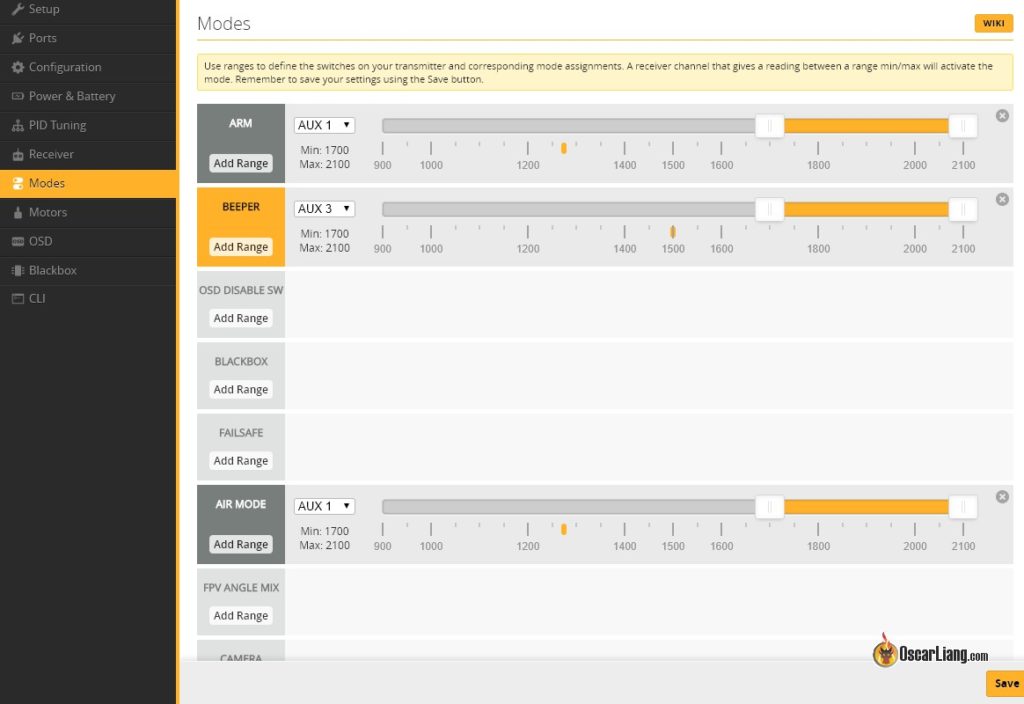
- Проверьте, настроен ли пункт ARM во вкладке Modes, должен быть выбран правильный канал (обычно это AUX1), а желтые ползунки расположены в правой части, определяющие положение переключателя. При перемещении переключателя в положение ON, нижний индикатор должен быть в зоне желтых ползунков.
- Если к дрону подключен USB (к ПК), то будет активна автоматическая защита. Отсоедините USB-кабель.
Если эти пункты проверены, но проблема не решена, то читайте дальше.
Видео:О моторах и пропеллерах для начинающихСкачать

Как проверить проблему арминга в Betaflight
Если у вас есть OSD Betaflight, добавьте на экран отображение «Warnings» и выберите отображение «Arming Disabled«, это позволит понять, что именно не дает запустить двигатели квадрокоптера.
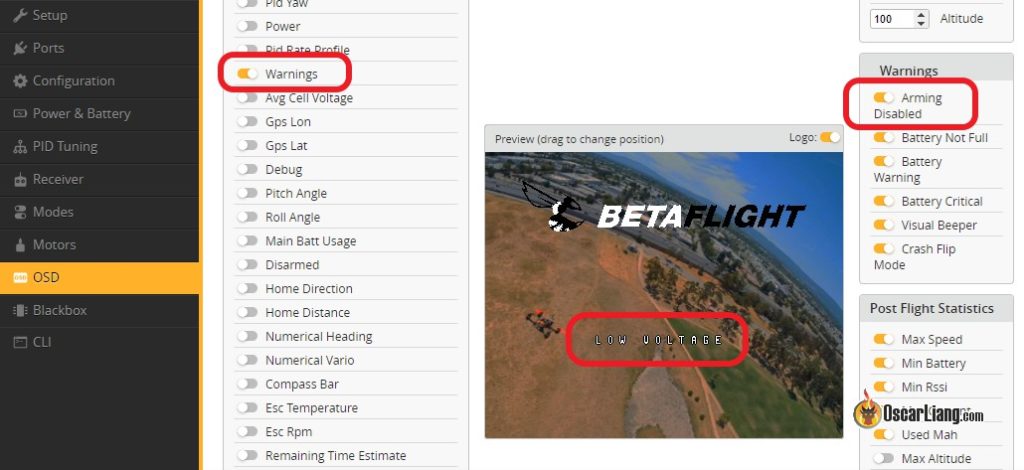
Если у вас нет OSD Betaflight, то вы можете проверить флажок «Arming Disable Flag» в Betaflight, так вы тоже сможете понять, что мешает заармиться дрону.
Есть несколько способов проверить проблему с помощью «Arming Disable Flag», для этого потребуется:
- Betaflight Configurator
- CLI
- Пищалка (Buzzer)
Betaflight Configurator
Зайдите в Betaflight конфигуратора с помощью компьютера во вкладку «Setup», блок «Info», там будет строчка «Arming Disable Flag»:
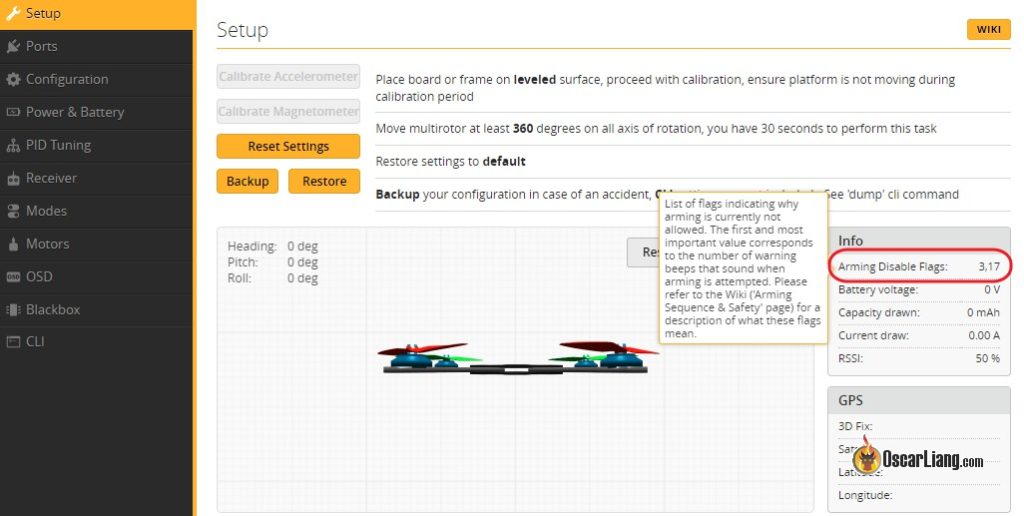
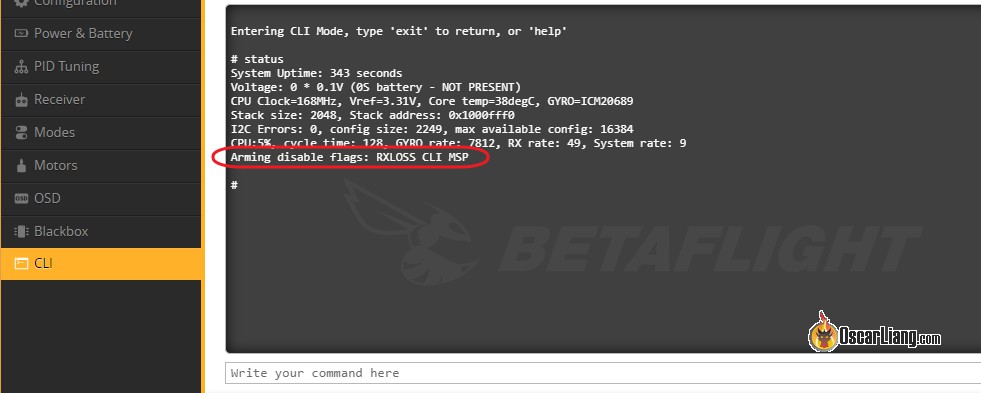
Альтернативной проверкой будет комнадная строка. Зайдите в CLI (Betaflight) и введите команду «status«, в конце будет информация о «Arming Disable Flags»:
Команда доступна в прошивке Betaflight версии 3.2 и выше.
Пищалка (Buzzer beeper)
Если нет возможности оперативно подключиться к компьютеру, можно использовать пищалку как индикатор конкретной проблемы. Звук можно разделить на следующие части:
- 5 коротких сигналов — не обращаем внимания, это норма;
- несколько длинных звуковых сигналов;
- несколько коротких звуковых сигналов с длинными интервалами.
Каждый длинный звуковой сигнал соответствует цифре 5, а короткий — 1. Цифру arming flag можно рассчитать по формуле:
- 0 длинных сигналов и 2 коротких = 2
- 1 длинный сигнал и 3 коротких = 8
- 2 длинных сигнала + 0 коротких = 10
Видео:Дрон кувыркается при арме? Не взлетает? Крутится вокруг оси? Краткий разбор основных проблем.Скачать

Таблица для поиска проблем с запуском квадрокоптера посредством сравнения числа из Arming flag
Как только вы узнаете цифру флага или название проблемы, смотрите эту таблицу для определения проблемы и ее решения. Таблица взята из Betaflight wiki и переведена для profpv.ru:
| Название | Описание | Код пищалки | Что нужно сделать | ||
|---|---|---|---|---|---|
| BF 3.2 | BF 3.3 | BF 3.4 | |||
| NOGYRO | гироскоп не найден или поврежден | 1 | 1 | 1 | Это может быть аппаратный сбой. Попробуйте залить прошлую версию прошивки если она работает, то дело в прошивке, а не в аппаратной части. |
| FAILSAFE | Активирован Failsafe | 2 | 2 | 2 | Исправьте условия активации Failsafe. |
| RX LOSS | Сигнал приемника не обнаружен | 3 | 3 | 3 | Приемник неисправен или нет связи с пультом. |
| BAD RX | После срабатывания Failsafe приемник остался включеным | 4 | 4 | 4 | Выключите и включите питания к приемнику (дрону). |
| BOXFAILSAFE | Включен переключатель «FAILSAFE» | 5 | 5 | 5 | Смотрите FAILSAFE». |
| RUNAWAY | Активировалась функция «Runway Takeoff Prevention» | 6 | 6 | Это функция проверяет несколько параметров для безопасного старта и если проверка обнаружит, что моторы настроены не в том порядке, гироскоп не смог определить правильное положение (дрон наклонен), установлены неправильные пропеллеры и тд., то сработает эта функция. Для исправления: отключите и включите питание квадрокоптера. | |
| THROTTLE | Стик газа (Throttle) настроен на слишком большое значение | 6 | 7 | 7 | Убедитесь, что значение стика газа настроено верно — min_check. |
| ANGLE | Летательный аппарат не соответствует уровню | 7 | 8 | 8 | Установить уровень в пределах small_angle степени (25 по умолчанию). |
| BOOT GRACE | Попытка запуска сразу после включения питания | 8 | 9 | 9 | После включения питания подождать pwr_on_arm_grace секунд (по умолчанию 5). |
| NO PREARM | Переключатель арминга не настроен или не включен | 9 | 10 | 10 | Поменяйте положение переключателя или настройте его. |
| LOAD | Система слишком нагружена для безопасного полета | 10 | 11 | 11 | Пересмотрите настройки полетного контроллера и отключите ненужные функции. |
| CALIB | Датчики еще калибруются | 11 | 12 | 12 | Дождитесь окончания калибровки датчиков. |
| CLI | Активирована командная строка (CLI) | 12 | 13 | 13 | Выйдите из командной строки (CLI). |
| CMS | CMS (меню настроек) активировано через OSD или другой экран | 13 | 14 | 14 | Выйдите из настроек (или из OSD). |
| OSD | Включено меню OSD | 14 | 15 | 15 | Выйдите из меню OSD. |
| BST | Устройство Black Sheep Telemetry (TBS Core Pro, например) выключено и не позволяет запустить дрон | 15 | 16 | 16 | Прочитайте инструкцию к своему доп.оборудованию. |
| MSP | Активно соединение MSP, возможно через Betaflight Configurator | 16 | 17 | 17 | Разорвите соединение с Betaflight Configurator. |
| PARALYZE | Активен режим Paralyze | 18 | Отключите питание, затем включите. | ||
| GPS | GPS не нашел нужное количество спутников | 19 | Ожидайте соединение с нужным количеством спутников GPS. | ||
| ARM SWITCH | Стик газа в опасном положении | 17 | 18 | 20 | Переместите стик газа в безопасное положение (на минимум, обычно это нижнее положение). |
Читайте также: Коммутаторы зажигания cdi лодочных моторов
Видео:✔ Обратное вращение (реверс) моторов. Зачем это нужно? Теория и настройка [Inverted Prop Rotation]Скачать
![✔ Обратное вращение (реверс) моторов. Зачем это нужно? Теория и настройка [Inverted Prop Rotation]](https://i.ytimg.com/vi/2Gj0iYAquY0/0.jpg)
Другие проблемы
Акселерометр
Квадрокоптер может находиться на неровной поверхности, либо акселерометр не откалиброван. Попробуйте откалибровать датчик на ровной поверхности и взлетать пробуйте тоже с ровной поверхности. Если это не помогло, попробуйте увеличить в CLI параметр small_angle degrees , по умолчанию он 25. В крайнем случае, можно отключить акселерометр, если вы не летаете в режиме стабилизации.
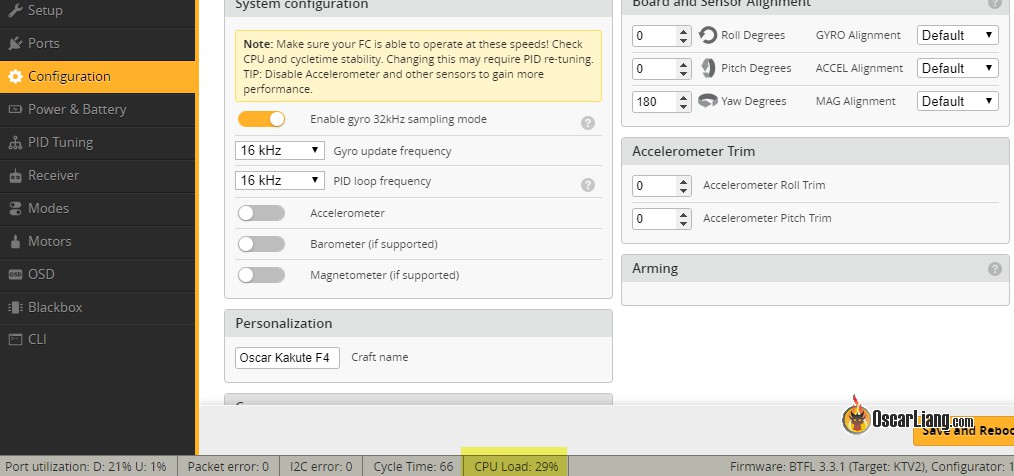
Большая загрузка процессора
Если вы включили все что нужно и ненужно, то скорее всего, процессор будет загружен на полную. Отключите лишние функции и постарайтесь добиться загрузки процессора до 50%. В противном случае, при полной загрузке полетный контроллер запретит взлет.
Газ, он же Throttle, он же дроссельная заслонка
Вам нужно проверить, какое нижнее значение у стика газа, по-хорошему, у всех каналов нижнее значение должно быть 1000, а верхнее 2000. Настройки производятся в зависимости от аппаратуры — либо в пульте, либо в конфигураторе во вкладке Configuration или Receiver. Также при подаче питания дрону, нужно убедиться, что стик газа в нижнем положении.
В прошивке Betaflight есть автоматическая защита, регулируется параметром « Min_Check», по умолчанию установлен на 1050 и, если к примеру, у вас стик газа в нижнем положении на 1060, то прошивка не даст запустить двигатели. Вам нужно настроить значения нижнего предела стика в разделах конфигурация и ресивер. Нужно добиться того, чтобы стик газа в нижнем положении показывал цифру ниже 1050.
Порог Морона
Некоторые FC могут иметь более чувствительные гироскопы, и квадрокоптер откажется запускаться после включения питания. При увеличении порога Moron в CLI может снизить чувствительность гироскопа во время инициализации. Попробуйте установить его на 100 или даже 120.
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала
📺 Видео
Квадрокоптер отключает моторы при резких движениях или наклонах? Решение проблемы в этом видео!Скачать

Выбор мотора, а правильнее говоря ВМГСкачать
Моторы сами набирают обороты INAV BETAFLIGHT Ошибка новичков!Скачать
Запуск двигателя на ARM Cortex-M3, STM32 CMSIS (DIY EFI, engine control unit)Скачать
Двигатель ARM 1.6л 101л.с Audi A4 B5 1999г.вСкачать
Контрактный двигатель Volkswagen (Фольксваген) 1.6 ARM | Где купить? | Тест мотораСкачать
⚖️ Справедливый мир Зе. Крушение вертолета президента Ирана. Смех Тисы. Беспредел ТЦК - ВигиринскийСкачать
Контрактный двигатель Volkswagen Passat 5 1.6i ARMСкачать
Одинаковые моторы, разные КВ. Какой мощнее? / ALNADOСкачать
Вечный двигатель из ЛЕГО? - Часть 7Скачать
VW Passat B5 модель двигателя ARM 2000годСкачать