
Сущность изобретения: привод азимутального устройства содержит конический редуктор, шарнирно прикрепленный к верхнему погону башни, червячный редуктор, подвешенный на кронштейне подвижной платформы башни с использованием шарикоподшипника. Связь между выходным валом конического редуктора и входным валом червячного редуктора осуществляется через карданный вал, защитный кожух которого используется для исключения вращения корпуса червячного редуктора относительно башни. При этом кожух для уменьшения погрешности изготовления и упрощения установки выполнен из двух подвижных относительно друг друга частей, шарнирно соединенных с корпусами конического и червячного редукторов. Корпус червячного редуктора служит основанием для закрепления механизма наведения. 2 ил.
Изобретение относится к машиностроению, в частности к военным гусеничным машинам, в которых необходимо измерение угла поворота прибора, установленного в башне на поворотной платформе, относительно корпуса машины независимо от положения башни.
Известен привод азимутального устройства дальномера 1Д14 (изделие 1B145, техническое описание 503.00.000ТО, часть 1. Подвижный разведывательный пункт ПРП-4М. Приборный комплекс, с. 51а — 51б, рис. 9, с. 93, чертеж 503.63.000СБ), состоящий из конического редуктора, червячного редуктора, карданного вала и кронштейна.
Недостатком данной конструкции привода является то, что из-за жесткого крепления червячного редуктора через кронштейн к башне требуется высокая точность изготовления и монтажа из-за наличия замкнутой размерной цепи: башня — редуктор — прибор — платформа — башня.
Другим недостатком является то, что привод предназначен только для передачи вращения от нижнего погона башни к азимутальному устройству, а для наведения прибора (дальномера 1Д14) на цель по азимуту (в горизонтальной плоскости) при неподвижной башне используется специальный механизм наведения.
Сущность изобретения заключается в том, что в конструкции привода азимутального устройства червячный редуктор подвешен на кронштейне платформы с использованием шарикоподшипника, а для исключения вращения корпуса червячного редуктора использован защитный кожух карданного вала, при этом данный кожух для исключения погрешности изготовления и установки выполнен из двух подвижных относительно друг друга частей, шарнирно соединенных с корпусами редукторов. Данная конструкция установки червячного редуктора позволяет смонтировать механизм наведения платформы на корпусе червячного редуктора.
На фиг.1 изображена кинематическая схема предлагаемого привода; на фиг.2 — кожух с вилкой, вид сверху.
Привод состоит из конического редуктора 1, карданного вала 2, вилки 3, кожуха 4, червячного редуктора 5, механизма 6 наведения.
Конический редуктор 1 прикреплен шарнирно к верхнему погону башни 7. Шарнирное крепление редуктора обеспечивает при помощи пружины постоянное поджатие зубьев ведущей шестерни 8 конического редуктора 1 к зубьям венца нижнего погона 9 башни 7. Связь выходного вала конического редуктора 1 и входного вала червячного редуктора 5 осуществляется через карданный вал 2. Карданный вал 2 расположен внутри вилки 3 и кожуха 4. Вилка 3 одной стороной шарнирно с помощью пальцев 10 закреплена на корпусе конического редуктора, а другой стороной вставляется по скользящей посадке вовнутрь кожуха 4, который шарнирно с помощью пальцев 10 закреплен на корпусе червячного редуктора. На корпусе червячного редуктора 5 смонтирован механизм 6 наведения, червячный вал которого находится в зацеплении с сектором 11, расположенным на кронштейне 12. На кронштейне 12 через шарикоподшипник 13 подвешен червячный редуктор 5. Крестово-кулисная муфта 14 соединяет выходной вал 15 червячного редуктора с азимутальным устройством 16.
Привод работает следующим образом.
Читайте также: Бортовой редуктор мтз 82 вес
При повороте башни 7 вращение передается от ведущей шестерни 8 конического редуктора 1 через конический редуктор, карданный вал 2, червячный редуктор 5, крестово-кулисную муфту 14 к азимутальному устройству 16.
При вращении маховика 17 механизма 6 наведения вращение к азимутальному устройству 16 передается через червячную пару механизма 6 наведения и кронштейн 12. При этом платформа 18 с кронштейном 12 и азимутальным устройством 16 поворачивается относительно выходного вала 15 червячного редуктора 5, разворот которого относительно башни исключается вилкой 3 и кожухом 4, подвижно соединенными относительно друг друга по скользящей посадке.
При работе привода в «Режиме передачи» и «Режиме наведения» азимутальное устройство 16 автоматически суммирует угол поворота платформы 18 относительно башни 7 и угол поворота башни относительно корпуса машины, чем достигается измерение угла поворота прибора относительно корпуса машины независимо от положения башни.
Преимущество предлагаемого привода азимутального устройства заключается в снижении трудоемкости изготовления и монтажа привода азимутального устройства и возможности установки механизма наведения платформы на корпусе червячного редуктора.
Привод азимутального устройства, содержащий конический редуктор, червячный редуктор, карданный вал, кронштейн крепления червячного редуктора, отличающийся тем, что червячный редуктор подвешен шарнирно на кронштейне поворотной платформы, а для исключения вращения корпуса червячного редуктора относительно башни служит защитный кожух кардана, выполненный из двух подвижных относительно друг друга частей, шарнирно соединенных с корпусами конического и червячного редукторов, при этом корпус червячного редуктора служит основанием для закрепления механизма наведения.
Азимутальный редуктор
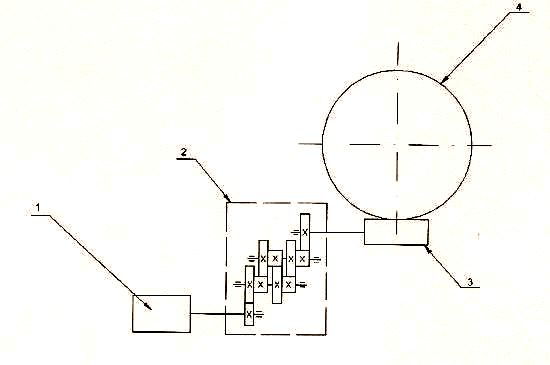
Рисунок 10. Кинематическая схема азимутального редуктора
1 — двигатель 2 — редуктор, 3 — червяк, 4 — передаточное колесо
Характеристики зубчатых колес редуктора и кинематических пар приведены в таблице 6.
Характеристики зубчатых колес и кинематических пар редуктора
| № колеса | Z1 | Z2 | Z3 | Z4 | Z5 | Z6 | Z7 | Z8 | Z9 | Z10 | Z11 | Z12 |
| Число зубьев | 18 | 30 | 12 | 30 | 12 | 30 | 12 | 30 | 12 | 10 | 1* | 95 |
| Делительный модуль, мм | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 1 | 1 |
| Делительный диаметр | 9 | 15 | 6 | 15 | 6 | 15 | 6 | 15 | 6 | 20 | 95 | |
| Передаточное отношение |
* — Z11 – число витков (заходов) червяка.
Общее передаточное отношение азимутального редуктора

(31)


Угловой шаг двигателя
Тогда с учетом передаточного отношения угловой шаг на выходе редуктора будет составлять

Т.е. разрешение такого азимутального электропривода почти на два порядка выше, чем максимально допустимая погрешность системы наведения и сопровождения.

Определим число импульсов, подаваемых на управляющие обмотки
шагового двигателя, для обеспечения азимутального вращения измерительной системы со скоростью
Угловая скорость вала шагового двигателя должна составлять

(32)
Частота вращения шагового двигателя (в об/с)
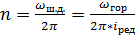
(33)
Число шагов двигателя за 1 оборот составляет

(34)
Тогда время, необходимое для поворота вала шагового двигателя на 1 шаг, выраженное в сек, будет равно

(35)
Частота управляющих импульсов
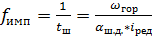
, (36)
где  шаговый угол двигателя, выраженный в радианах (
шаговый угол двигателя, выраженный в радианах (  ).
).

Итак, =19,12 Гц, что значительно ниже частоты приемистости электродвигателя.
Вывод: азимутальный редуктор альт–азимутальной установки вместе с
выбранным шаговым двигателем подходит по всем условиям в качестве ази-
мутального электропривода следящей ИК-системы.
Редуктор угла места
На рисунке 11 приведена кинематическая схема редуктора угла места альт-азимутальной установки.
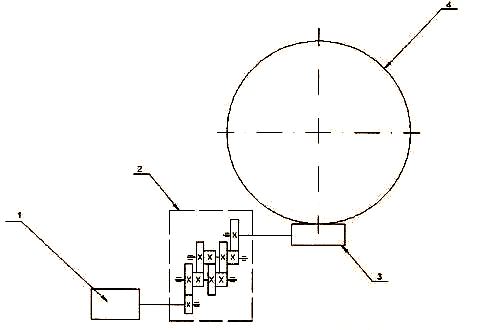
Рисунок 11. Редуктор угла места альт-азимутальной установки
1 — двигатель, 2 — редуктор, 3 — червяк, 4 — передаточное колесо
Характеристики зубчатых колес редуктора и кинематических пар приведены в таблице 7.
Характеристики зубчатых колес и кинематических пар редуктора
| № колеса | Z1 | Z2 | Z3 | Z4 | Z5 | Z6 | Z7 | Z8 | Z9 | Z10 | Z11 | Z12 |
| Число зубьев | 18 | 30 | 12 | 30 | 12 | 30 | 12 | 30 | 12 | 10 | 1* | 57 |
| Делительный модуль, мм | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 1 | 1 |
| Делительный диаметр | 9 | 15 | 6 | 15 | 6 | 15 | 6 | 15 | 6 | 20 | 57 | |
| Передаточное отношение |
* — Z11 – число витков (заходов) червяка.
Общее передаточное отношение азимутального редуктора

Тогда с учетом передаточного отношения угловой шаг на выходе редуктора будет составлять


Определим число импульсов, подаваемых на управляющие обмотки
шагового двигателя, для обеспечения вертикального вращения измерительной системы со скоростью .

что также значительно ниже частоты приемистости электродвигателя.
Вывод: рассчитанный кинематический узел вполне подходит для про-
ектируемой следящей ИК-системы.
Научный форум dxdy
Редуктор привода азимутального вращения антенны
С коэффициентом, выражающим перевод об/мин в рад/сек?
Смотрите внимательнее, Brigina спаришивала про расчет электрического двигателя, тут все расчеты обычно ведуться в единицах Си, об/мин применяется для наглядности представления (традиция такая, от паровых машин идущая).
И вообще, совет Brigin ‘е следующий: все единицы автоматически, не задумываясь, приводить к единицам Си, проблем будет меньше.
| Экс-модератор |
Если подбор — тогда полностью согласен.
Однако, я думал, что девушке придется считать момент или мощность на валу двигателя, там перевод в рад/сек необходим.
Добавлено спустя 2 минуты 6 секунд:
Кстати там вообще было написано так:
Так что Вы правы, весь вопрос в том, чего именно хочется посчитать.
Я вычиляю по инструкции по формуле: 
где  — минимально необходимая мощность двигателя, Вт;
— минимально необходимая мощность двигателя, Вт;  — коэффициент запаса, учитывающий необходимость преодоления динамических нагрузок в момент пуска, реверса;
— коэффициент запаса, учитывающий необходимость преодоления динамических нагрузок в момент пуска, реверса;  — статический, динамический моменты сил сопротивления на выходном валу редуктора, Нм;
— статический, динамический моменты сил сопротивления на выходном валу редуктора, Нм;  — номинальная угловая скорость выходного вала редуктора, рад/с;
— номинальная угловая скорость выходного вала редуктора, рад/с;  — коэффициент полезного действия редуктора.
— коэффициент полезного действия редуктора.
Величину динамического момента на выходном валу можно найти, если известны приведенный к валу антенны момент инерции механизма  и угловое ускорение
и угловое ускорение  , возникающее в момент пуска, реверса.
, возникающее в момент пуска, реверса.  .
.
Значение углового ускорения можно определить, зная время реверса  .
.  .
.
Формулу КПД полезного действия редуктора я взяла: 

Коэффициент запаса, учитывающий необходимость преодоления динамических нагрузок в момент пуска, реверса, взяла равный 1,1. Потому что, такой коэффициент взяли в примере, но откуда его взяли не описывается.
Искодных данных есть скорость обзора в град/с = 110, угол обзора по азимуту в градусах = 120, время реверса в секундах = 0,095, приведенный к валу зеркала антенны момент инерции системы = 0,2, приведенный к валу зеркала антенны статистический момент = 2,4, расчетная долговечность в часах = 1700.
В итоге мощность электродвигателя у меня получилась 35 Вт.
Теперь по полученному значению мощности, исходя из требований задания на проектирование, по напряжению и частоте питания электродвигателя, мне нужно из таблицы выбрать двигатель с ближайшим большим значением мощности.
В техническом требовании написано, что электродвигатель подберите из условий электропитания на борту:
постоянный ток — напряжение = 27 В;
переменный ток: напряжение = 36 В, частота 400 Гц;
напряжение = 115 В, частота 400Гц.
Мне не понятно, как пользоваться таблицами, которые даются в приложении. Не у всех электродвигателей проставлена мощность почему-то, а в части таблицах есть только буквы, но нет расшифровки, какую величину подразумевают. Например буква D или L, буквы A и B. Ну, D и L — это видимо габариты какие-нибудь, а что подразумевается под A и B, если это не единицы измерения.
Может я неправильно считаю?
Добавлено спустя 1 час 29 минут 32 секунды:
http://ivitek.narod.ru/stud/inpos.htm
Нашла ссылку про электродвигатели. Но двигателя с такой мощностью, как у меня, там нет
| Экс-модератор |

Вот этого я не понимаю. Если Вы учитываете таким образом динамический момент, то что учитывает ?
Маловато, конечно. Но с учетом того, что у Вас там червяк стоит, может и нормально (хотя я не знаю, какое у нее передаточное число, если до 10-14, то тогда, наверное, маловато).

Ну это скромненько. Обычно берут 1.4. Но у Вас неким мистическим образом учитывается динамический момент, поэтому это вообще не слишком понятно.
Момент — статический, а не статистический.
Ну. эти данные надо немного перевести на человеческий язык в переводе на выходной вал.
Мало. А каков размер Вашей установки?
Ну видимо это какие-то хитрые (и очень дурацкие) учебные таблички, в которых должен быть Ваш ЭД (или что-то близкое — ведь никогда не бывает точного совпадения), если Вы правильно посчитаете.
А разве частоту вращения ЭД не надо учитывать?
А там рядом нет схемки или чертежа? Обычно это габаритные размеры для чертежа общего вида.
Brigina , не знаю, как там у Вас в методичке написано, но электродвиатель на практике выбирается исходя из следующих условий:
1. Постоянного/переменного тока коллекторный/бесколлекторный — следует из ТЗ. Бесколлекторный в настоящий момент предпочтительней.
2. По пусковому и номинальному моменту (или номинальному и коэффициенту кратности пускового момента, что одно и то же). Лучше — по моментной характеристике M = f(n).
3. По номинальной и максимальной частоте вращения.
4. По величине (и частоте, если требуется) питающего напряжения.
Мощность инетересует только в плане потребления электроэнергии. Но, если Вы знаете мощность, Вы всегда посчитаете момент через частоту вращения.
Еще раз подчеркну основную мысль — в первую очередь всегда интересует момент на валу, а не мощность, ибо выбрав, например, подходящий по номинальной мощности асинхронный двигатель, Вы можете совершить ошибку — он не разовьет требуемого пускового момента при пуске под нагрузкой.
К сожалению, в большинстве случаев, двигатели нормируются именно по мощности .
Добавлено спустя 32 секунды:
По поводу различных двигателей в методичке — что Вам мешает забить их в гугль и попробовать найти характеристики?
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей