
Скопилось тут у меня достаточно много моторчиков от старых винчестеров. Выкидывать это добро — жалко, поэтому решено было куда-нибудь их приделать. Ну, до «приделать» мы ещё дойдём, а перво-наперво неплохо было бы разобраться как такие моторы вообще работают и как ими управлять. Написано об этом в общем-то довольно много, но я попробую изложить всю эту теорию несколько по-новому, так сказать под другим углом.
Итак, поехали. Аббревиатура BLDC расшифровывается с буржуинского как brushless direct current (motor) — бесщёточный мотор постоянного тока. По своей сути это обычный трёхфазный синхронный электродвигатель с постоянными магнитами, по крайней мере в том, что касается конструкции самого двигателя. Про общие принципы работы синхронных двигателей можно почитать вот тут.
Если вкратце говорить о конструкции, то тут всё просто, — на статоре двигателя располагаются электромагниты, намотанные тремя проводами (три фазы), на роторе закреплены постоянные магниты. Двигатели с ротором, расположенным внутри статора, называются Inrunner («крутилка» внутри), двигатели с ротором, расположенным вокруг статора, называются Outrunner («крутилка» снаружи). Оба варианта показаны на рисунке слева. Обмотки статора соединяются между собой в звезду или в треугольник. Вот и вся конструкция.
Что же в нём всё таки особенного, чем он всё таки отличается от обычного синхронника и как его запитать постоянным током? Для того, чтобы это понять — с обычного синхронника и начнём, постепенно «переделывая» его в bldc-мотор.
Как питается обычный синхронник
Для начала давайте нарисуем диаграмму подачи напряжений на обмотки обычного синхронного электродвигателя (рисунок справа). Это три синусоиды, которые сдвинуты на 120 0 по фазе. Они, как известно, создают вращающееся магнитное поле, с которым сцепляется и синхронно вращается магнитное поле ротора (ну и, соответственно, сам ротор). Вертикальные оси на рисунке (U, V, W) — напряжение на обмотках относительно нулевого провода трёхфазной сети (тот, к которому подключается общая точка при соединении обмоток звездой), горизонтальные оси (t) — оси времени.
Переделываем обычный синхронник на однополярное питание
А теперь давайте возьмём и сделаем нашу синусоиду дискретной, ну то есть разделим её на кучу участков, на каждом из которых часть синусоиды заменим на среднее для этого участка напряжение(рисунок слева). Что принципиально поменялось? Да ничего! При достаточно большой степени дискретизации двигатель вообще не заметит никакой разницы.
Это как со звуком. Звук ведь сейчас почти повсеместно цифровой, то есть дискретный, однако мало кто может отличить цифровой звук от аналогового. Ну, разве что какие-то особо изощрённые любители «тёплого лампового звука» (и то, это им только так кажется). Или другая аналогия — если бы у телеги колеса были не идеально круглыми, а многогранными с очень большим количеством маленьких граней. Телега бы всё равно отлично ехала, просто колеса бы вращались не совсем равномерно.
С нашим двиглом будет ровно то же самое. Его вращение будет слегка неравномерным, поскольку слегка неравномерным станет модуль вращающего момента, но в целом двигатель как крутился — так и будет крутиться.
А что если мы вместо переменного напряжения будем делать эти дискретные синусоиды от источника постоянного напряжения? Да без разницы, абсолютно. Мы можем за нулевой потенциал принять любой уровень напряжения. Тем более в идеальном случае (обмотки абсолютно одинаковые) ток через нулевой провод, подключенный к общей точке звезды, равен нулю (а у треугольника и вовсе нет никакой общей точки). Так что ничего такого особенного для нас в потенциале общей точки звезды нет.
Читайте также: Мотор лодочный ямаха 40 двухтактный с водометом
Как сделать цифровые синусоиды
Ну вот мы и пришли к тому, что наш обычный синхронный двигатель может работать от постоянного напряжения. Всё, что нам теперь нужно — это каким-то образом извернуться и сделать цифровые синусоиды. Да легко. Берём на каждую фазу по два ключа и шинкуем этими ключами импульсы, скважность которых изменяется по синусоидальному закону (ну то есть применяем ШИМ-модуляцию). Тогда среднее за время импульса напряжение тоже будет изменяться по синусоидальному закону. Схема показана на рисунке справа.
От синусоид к блочной коммутации
А теперь поиздеваемся над нашими синусоидами ещё немного, — аппроксимируем исходные синусоиды не множеством маленьких прямоугольных импульсов, а только шестью, как это показано на рисунке справа.
Если проводить аналогию с телегой, то мы, можно сказать, заменили идеально круглое колесо не многоугольником, а конкретно шестиугольником. Поедет наша телега с шестиугольными колёсами? Да она и с квадратными поедет, и с треугольными, весь вопрос в том, насколько лошадь сильная. Ну и, естественно, чем меньше углов — тем сильнее нашу телегу будет трясти. Я, кстати, попозже покажу как сделать так, чтобы телегу с треугольными колёсами трясло поменьше. Но… вернёмся к нашим моторам.
У нас всё аналогично, чем меньшим количеством отрезков мы аппроксимируем синусоиду — тем более неравномерным будет вращение ротора, однако, вращение всё равно будет, никуда не денется.
Первый интервал у нас на картинке получился разорванным, так что давайте эту картинку перерисуем в более удобоваримом виде, сдвинув фазу таким образом, чтобы все интервалы получились сплошными. У нас все сигналы периодические, поэтому без разницы, какую точку принять за начало отсчёта и с какого интервала начинать нумерацию, главное чтобы порядок следования этих интервалов остался правильным. Заодно, кстати, и нулевой потенциал на рисунке сдвинем таким образом, чтобы он соответствовал минусу источника питания (мы же собираемся от источника постоянного напряжения всё это запитывать). После проделанных манипуляций получим картинку слева. Видно, что теперь нам для управления нужно всего три уровня (синие, жёлтые и красные участки), один из которых — это минус источника питания (синие участки).
А что делать, если у нас нет ШИМа? Как тогда сформировать жёлтые участки? Да никак. Выкинем их и всё. Тут как бы придётся сделать ещё одно допущение. Если вернуться к реальным синусоидам, то в момент пересечения этими синусоидами нуля (имеется ввиду ноль относительно нулевого провода звезды, а не относительно источника постоянного напряжения) потребляемая соответствующими обмотками от источника питания мощность равна нулю (напряжение между двумя концами обмотки — ноль, значит и потребляемая мощность — ноль). То есть источник питания в этот момент как бы можно и отключить, и ничего не изменится.
Теперь вернёмся к нашим «шестиугольным колёсам». Жёлтые участки на нашей последней картинке как раз аппроксимируют те участки реальных синусоид, которые пересекают ноль (относительно нулевого провода). То есть на этих участках средняя потребляемая мощность тоже как бы должна быть равна нулю. И поэтому источник питания тоже как бы можно отключить и всё будет работать, а мы получим классический алгоритм управления обмотками BLDC-моторов. Этот алгоритм называется блочной коммутацией и именно моторы с таким алгоритмом управления называются BLDC.
Читайте также: Все куклы моторы хай
Что нам этот алгоритм даёт? Очень просто. Теперь нам не нужно никаких ШИМ-ов, нужно только по 2 раза за цикл переключить каждый из наших шести ключей, вот и всё. Картинка этих переключений показана на рисунке справа. Обратная ЭДС у нас, кстати, теперь будет трапециевидная, а совсем не синусоидная, ну да про это мы ещё поговорим.
Частота вращения ротора, понятное дело, как и для любого синхронника, определяется частотой циклов подачи управляющих напряжений (раньше у нас это была просто частота синусоид, но теперь так уже не скажешь, синусоид-то как бы больше нет), делённой на количество пар полюсов ротора.
Собственно говоря, можно было и сразу последнюю картинку нарисовать и сказать — смотрите, моторы вот с такими управляющими напряжениями на обмотках называются BLDC. Но тогда было бы непонятно, откуда это всё взялось. А теперь, надеюсь, видно, что алгоритм рождён не с потолка, а получился в результате ряда аппроксимаций обычных синусоид, питающих обычные синхронники. А раз так, то возврат к любому предыдущему уровню аппроксимации для BLDC-мотора вполне возможен, ничего принципиально не мешает нам запитывать его, например, от трёх синусоид или от трёх цифровых синусоид.
Создание и тестирование бесколлекторного мотора
В этой статье мы хотели бы рассказать о том, как мы с нуля создали электрический мотор: от появления идеи и первого прототипа до полноценного мотора, прошедшего все испытания. Если данная статья покажется вам интересной, мы отдельно, более подробно, расскажем о наиболее заинтересовавших вас этапах нашей работы.
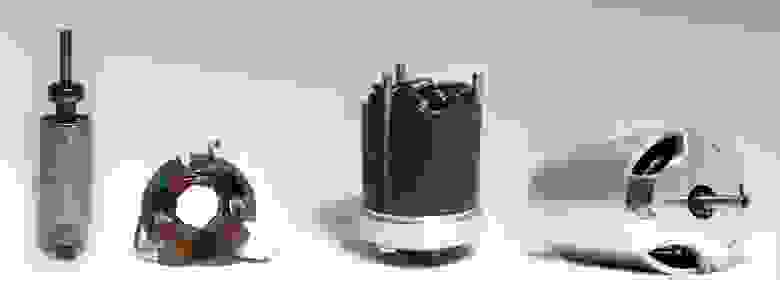
На картинке слева направо: ротор, статор, частичная сборка мотора, мотор в сборе
Вступление
Электрические моторы появились более 150 лет назад, однако за это время их конструкция не претерпела особых изменений: вращающийся ротор, медные обмотки статора, подшипники. С годами происходило лишь снижение веса электромоторов, увеличение КПД, а также точности управления скоростью.
Сегодня, благодаря развитию современной электроники и появлению мощных магнитов на основе редкоземельных металлов, удаётся создавать как никогда мощные и в то же время компактные и легкие “Бесколлекторные” электромоторы. При этом, благодаря простоте своей конструкции они являются наиболее надежными среди когда-либо созданных электродвигателей. Про создание такого мотора и пойдет речь в данной статье.
Описание мотора
В “Бесколлекторных моторах” отсутствует знакомый всем по разборке электроинструмента элемент “Щетки”, роль которых заключается в передаче тока на обмотку вращающегося ротора. В бесколлекторных двигателях ток подается на обмотки не-двигающегося статора, который, создавая магнитное поле поочередно на отдельных своих полюсах, раскручивает ротор, на котором закреплены магниты.
Первый такой мотор был напечатан нами 3D принтере как эксперимент. Вместо специальных пластин из электротехнической стали, для корпуса ротора и сердечника статора, на который наматывалась медная катушка, мы использовали обычный пластик. На роторе были закреплены неодимовые магниты прямоугольного сечения. Естественно такой мотор был не способен выдать максимальную мощность. Однако этого хватило, что бы мотор раскрутился до 20к rpm, после чего пластик не выдержал и ротор мотора разорвало, а магниты раскидало вокруг. Данный эксперимент сподвиг нас на создание полноценного мотора.
Читайте также: Безалкогольное пиво мотор из фикс прайса
Узнав мнение любителей радиоуправляемых моделей, в качестве задачи, мы выбрали мотор для гоночных машинок типоразмера “540”, как наиболее востребованного. Данный мотор имеет габариты 54мм в длину и 36мм в диаметре.
Ротор нового мотора мы сделали из единого неодимового магнита в форме цилиндра. Магнит эпоксидкой приклеили на вал выточенный из инструментальной стали на опытном производстве.

Статор мы вырезали лазером из набора пластин трансформаторной стали толщиной 0.5мм. Каждая пластина затем была тщательно покрыта лаком и затем из примерно 50 пластин склеивался готовый статор. Лаком пластины покрывались чтобы избежать замыкания между ними и исключить потери энергии на токах Фуко, которые могли бы возникнуть в статоре.

Корпус мотора был выполнен из двух алюминиевых частей в форме контейнера. Статор плотно входит в алюминиевый корпус и хорошо прилегает к стенкам. Такая конструкция обеспечивает хорошее охлаждение мотора.

Измерение характеристик
Для достижения максимальных характеристик своих разработок, необходимо проводить адекватную оценку и точное измерение характеристик. Для этого нами был спроектирован и собран специальный диностенд.

Основным элементом стенда является тяжёлый груз в виде шайбы. Во время измерений, мотор раскручивает данный груз и по угловой скорости и ускорению рассчитываются выходная мощность и момент мотора.
Для измерения скорости вращения груза используется пара магнитов на валу и магнитный цифровой датчик A3144 на основе эффекта холла. Конечно, можно было бы измерять обороты по импульсам непосредственно с обмоток мотора, поскольку данный мотор является синхронным. Однако вариант с датчиком является более надёжным и он будет работать даже на очень малых оборотах, на которых импульсы будут нечитаемы.
Кроме оборотов наш стенд способен измерять ещё несколько важных параметров:
- ток питания (до 30А) с помощью датчика тока на основе эффекта холла ACS712;
- напряжение питания. Измеряется непосредственно через АЦП микроконтроллера, через делитель напряжения;
- температуру внутри/снаружи мотора. Температура измеряется посредством полупроводникового термосопротивления;
Для сбора всех параметров с датчиков и передачи их на компьютер используется микроконтроллер серии AVR mega на плате Arduino nano. Общение микроконтроллера с компьютером осуществляется посредством COM порта. Для обработки показаний была написана специальная программа записывающая, усредняющая и демонстрирующая результаты измерений.

В результате наш стенд способен измерять в произвольный момент времени следующие характеристики мотора:
- потребляемый ток;
- потребляемое напряжение;
- потребляемая мощность;
- выходная мощность;
- обороты вала;
- момент на валу;
- КПД;
- мощность уходящая в тепло;
- температура внутри мотора.
Видео демонстрирующее работу стенда:
Результаты тестирования
Для проверки работоспособности стенда мы сначала испытали его на обычном коллекторном моторе R540-6022. Параметров для этого мотора известно достаточно мало, однако этого хватило, чтобы оценить результаты измерения, которые получились достаточно близкими к заводским.
Затем уже был испытан наш мотор. Естественно он смог показать лучшее КПД(65% против 45%) и при этом больший момент(1200 против 250 г на см), чем обычный мотор. Измерение температуры тоже дало достаточно хорошие результаты, во время тестирования мотор не нагревался выше 80 градусов.
Но на данный момент измерения пока не окончательны. Нам не удалось измерить мотор в полном диапазоне оборотов из-за ограничения мощности источника питания. Также предстоит сравнить наш мотор с аналогичными моторами конкурентов и испытать его “в бою”, поставив на гоночную радиоуправляемую машину и выступить на соревнованиях.
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала