
Частота вращения ротора, при которой работает асинхронный электродвигатель, зависит от частоты питающего напряжения, от мощности текущей нагрузки на валу, и от числа электромагнитных полюсов данного двигателя. Эта реальная частота вращения (или рабочая частота) всегда меньше так называемой синхронной частоты, которая определяется лишь параметрами источника питания и количеством полюсов обмотки статора данного асинхронного двигателя.
Таким образом, синхронная частота вращения двигател я — это частота вращения магнитного поля обмотки статора при номинальной частоте питающего напряжения, и она несколько отличается от рабочей частоты. В итоге количество оборотов в минуту под нагрузкой всегда меньше так называемых синхронных оборотов.
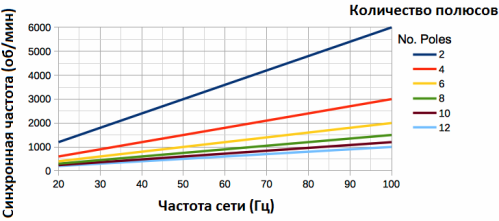
На приведенном рисунке видно, как синхронная частота вращения для асинхронного двигателя с тем или иным количеством полюсов статора зависит от частоты питающего напряжения: чем выше частота — тем выше угловая скорость вращения магнитного поля. Так например в частотно-регулируемых приводах меняя частоту питающего напряжения изменяют синхронную частоту двигателя. При этом изменяется и рабочая частота вращения ротора двигателя под нагрузкой.
Обычно обмотку статора асинхронного двигателя питают трехфазным переменным током, который и создает вращающееся магнитное поле. И чем больше пар полюсов — тем меньшей будет синхронная частота вращения — частота вращения магнитного поля статора.
Большинство современных асинхронных двигателей имеют от 1 до 3 пар магнитных полюсов, в редких случаях 4, ведь чем больше полюсов — тем ниже КПД асинхронного двигателя. Однако при меньшем количестве полюсов скорость вращения ротора можно менять очень-очень плавно, изменяя частоту питающего напряжения.
Как уже было отмечено выше, реальная рабочая частота асинхронного двигателя отличается от его синхронной частоты. Почему так происходит? Когда ротор вращается с частотой меньшей чем синхронная, то проводники ротора пересекают магнитное поле статора с некоторой скоростью и в них наводится ЭДС. Эта ЭДС создает токи в замкнутых проводниках ротора, в результате данные токи взаимодействуют с вращающимся магнитным полем статора, и возникает крутящий момент — ротор увлекается магнитным полем статора.
Видео:Почему Луна всегда повёрнута к Земле одной стороной?Скачать


Если момент имеет достаточную величину чтобы преодолеть силы трения, то ротор начинает вращаться, при этом момент электромагнитный равен тормозящему моменту, который создают нагрузка, силы трения и т. д.
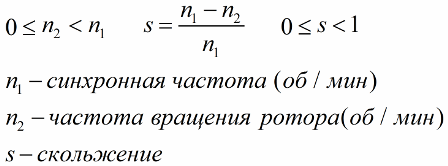
При этом ротор все время отстает от магнитного поля статора, не может рабочая частота достичь синхронной частоты, так как если бы это произошло, то в проводниках ротора перестала бы наводиться ЭДС, и вращающий момент просто не появится. В итоге, для двигательного режима вводят величину «скольжение» (скольжение s, как правило, составляет 2-8%), в связи с чем справедливо и следующее неравенство двигателя:
Но если ротор того же асинхронного двигателя раскрутить при помощи какого-нибудь внешнего привода, например двигателем внутреннего сгорания, до такой скорости, что частота вращения ротора превысит синхронную частоту, то ЭДС в проводниках ротора и активный ток в них приобретут определенное направление, и асинхронный двигатель превратится в генератор.
Общий электромагнитный момент окажется тормозящим, скольжение s станет отрицательным. Но чтобы генераторный режим смог проявить себя, необходимо поставить асинхронному двигателю реактивную мощность, которая бы создавала магнитное поле статора. В момент старта такой машины в генераторном режиме может хватить остаточной индукции ротора и конденсаторов, которые подключают к трем фазам обмотки статора, питающей активную нагрузку.
Читайте также: Хускварна 128 смазка вала
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Видео:Синхронный и асинхронный двигатели. Отличия двигателейСкачать

Не пропустите обновления, подпишитесь на наши соцсети:
Пуск и регулирование частоты синхронных двигателей
Синхронный двигатель не имеет начального пускового момента. Если его подключить к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока, электромагнитный момент будет дважды изменять свое направление. Ротор обладает инерцией и не может быть в течение одного полупериода разогнан до синхронной частоты вращения. Следовательно, для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной.
Для пуска могут быть используются следующие способы:
2. Пуск с помощью разгонного двигателя.
При пуске с помощью разгонного двигателя обмотка статора отключена от сети, а на обмотку возбуждения подается напряжение постоянного тока. Специальный разгонный двигатель разворачивает ротор синхронного двигателя до частоты вращения близкой к синхронной. Затем обмотка статора включается в сеть, а разгонный двигатель выключают.
Асинхронный пуск аналогичен пуску асинхронного двигателя. Для этого синхронный двигатель снабжают специальной коротко-замкнутой пусковой обмоткой, выполненной по типу «беличья клетка» и уложенной в полюсных наконечниках ротора. Чтобы увеличить сопротивление стержней, клетку изготовляют из латуни. Обмотку возбуждения предварительно замыкают на гасящий резистор, сопротивление которого в 8—12 раз превышает активное сопротивление обмотки возбуждения с целью избежать перенапряжений.
При включении трехфазной обмотки статора в сеть образуется вращающееся магнитное поле статора, которое будет пересекать пусковую обмотку и наведет в ней ЭДС и ток. Вращающееся магнитное поле статора, взаимодействуя с полем пусковой обмотки, создает электромагнитные силы F и вращающий момент. Момент разгонит ротор до частоты вращения, близкой к синхронной (s 0 . При таком регулировании автоматически обеспечиваются условия устойчивой работы двигателя и его перегрузочная способность определяется только перегрузочной способностью преобразователя частоты.
Синхронные двигатели, регулируемые путем изменения частоты с самосинхронизацией, называют вентильными двигателями.
Синхронный компенсатор
Видео:Луна не вращается вокруг Земли!Скачать

Синхронный компенсатор представляет собой синхронный двигатель, работающий без нагрузки на валу; при этом по обмотке якоря проходит практически только реактивный ток. Синхронный компенсатор может работать в режиме улучшения cosφ или в режиме стабилизации напряжения.
Нагрузка сети носит активно-индуктивный характер – ток нагрузки Iн отстает по фазе от напряжения сети Uc. Для улучшения cosφ сети синхронный компенсатор работает в режиме перевозбуждения. Ток возбуждения регулируется так, чтобы ток якоря I1 синхронного компенсатора опережал на 90° напряжение сети Uc (рис. а) и был примерно равен реактивной составляющей тока нагрузки Iн р. В результате сеть загружается только активным током нагрузки Iн а.
Читайте также: Подшипник первичного вала ваз 2110 артикул
В отличие от батарей конденсаторов компенсатор может компенсировать как индуктивную (при перевозбуждении) так и емкостную (при недовозбуждении) составляющие тока.

В режиме стабилизации напряжения устанавливается ток возбуждения синхронного компенсатора чтобы ЭДС компенсатора Еf равнялась номинальному напряжению сети Ucн (рис. б). В сети имеется ток Iн, создающий падение напряжения ΔU= IнRccosφ + IнXc sinφ, где Rc и Хс — активное и индуктивное сопротивление сети; φ — угол сдвига фаз между векторами напряжения и тока сети.
Если напряжение сети понижается из-за возрастания тока нагрузки и становится меньше Ucн, то синхронный компенсатор забирает из сети реактивный опережающий ток I1 (рис. в). Это уменьшает падение напряжения на величину ΔUк= I1Xc. При повышении напряжения в сети, когда Uc > Ucн, синхронный компенсатор загружает сеть реактивным отстающим током I1 (рис. г), что приводит к увеличению падения напряжения на величину
ΔUк= I1Xc. Недостаток метода — синхронный компенсатор загружает линию реактивным током, увеличивая потери в ней.
Синхронные компенсаторы выпускаются мощностью от 10 до
100 МВА и по конструкции имеют следующие отличия от синхронного двигателя:
— не имеют выходного конца вала;
— вал не передает вращающий момент и выполняется менее массивным;
Видео:наглядно о вращении луны вокруг своей осиСкачать

— уменьшен воздушный зазор и размеры обмотки возбуждения;
— имеет более массивную магнитную систему для получения большого значения МДС;
-имеет явнополюсную конструкцию при числе полюсов 6 или 8.
Синхронный компенсатор должен быть оснащен автоматическим регулятором возбуждения, который при изменении режима напряжения в узле так регулирует его ток возбуждения, чтобы напряжение на зажимах компенсатора оставалось постоянным.
Энергетика синхронных машин
Часть мощности, потребляемой синхронной машиной, идет на компенсацию потерь, которые включают в себя:
1. Потери на возбуждение ΔРв..
2. Механические потери ΔРмех — это потери на трение в подшипниках и потери на вентиляцию. Они зависят от частоты вращения.
3. Магнитные потери ΔРст в основном имеют место в сердечнике статора, который подвергается перемагничиванию полем ротора. Они состоят из потерь на вихревые токи и перемагничивание. Потери в стали зависят от значения магнитной индукции, марки и толщины листов стали из которой набран сердечник якоря и частоты перемагничивания.
4. Электрические потери имеют место в обмотках статора
Видео:Асинхронные и Синхронные двигатели и генераторы. Мощный #энерголикбез ПЕРСПЕКТИВЫ ЭЛЕКТРОДВИГАТЕЛЕЙСкачать

5. Добавочные потери ΔРдоп учитывают потери на пульсацию магнитного потока, потери, вызванные поверхностным эффектом и др. Они равны 0,25 – 0,5% полезной мощности генератора
Механические и магнитные не зависят от нагрузки. Их называют постоянными. Электрические потери зависят от нагрузки машины, поэтому эти потери называются переменными.
На рисунке приведены энергетические диаграммы синхронных генераторов и двигателей при возбуждении от возбудителя (рис. а), а также от сети переменного тока (рис. а).

К генераторам подводится механическая мощность Р1= Мврω1, за счет которой покрываются потери холостого хода, состоящие из механических потерь ΔРмех, потерь в стали ΔРст и добавочных потерь ΔРдоп. Если возбудитель приводится от вала генератора, то потери в возбудителе и в цепи возбуждения ΔРв также покрываются за счет механической мощности. Остаток — электромагнитная мощность Рэм= Мэмω1 передается магнитным полем индуктора якорю и преобразуется в его обмотке в электрическую мощность. Часть этой мощности идет на потери в обмотке якоря ΔРэ, а остальная мощность передается на зажимы генератора и является полезной мощностью
Р2 =mU1I1 cosφ1 (рис. а). Если генератор выполнен с самовозбуждением, то с его зажимов снимается мощность ΔРв, часть которой идет на потери в цепи возбуждения (рис. б), а остаток — полезная мощность Р2 отдается в сеть.
Читайте также: Крестовина карданного вала 65х172
Коэффициент полезного действия:
У двигателей потребляемая мощность Р1 =mU1I1 cosφ1 поступает из электрической сети. За ее счет покрываются электрические потери ΔРэ в обмотке якоря и мощность возбуждения ΔРв при возбуждении от сети переменного тока. Оставшаяся часть преобразуется в электромагнитную мощность Рэм= Мэмω1, связанную с вращающимся магнитным полем. За счет этого поля покрываются потери в стали ΔРст и добавочные потери ΔРдоп, а остальное передается ротору в виде механической мощности Рмех. Механическая мощность должна покрыть механические потери ΔРмех и мощность ΔРв, потребляемую возбудителем. Оставшаяся часть механической мощности — мощность на валу является полезной мощностью двигателя Р2= Мврω1.
Энергетические диаграммы показывают, что преобразование энергии в синхронной машине более сложно, чем это описывалось простейшими формулами и векторными диаграммами. Подключения синхронного двигателя к сети и синхронизации еще недостаточно, чтобы машина создала вращающий момент на валу — сначала должны быть покрыты потери в обмотке якоря и в стали. Если к валу генератора, синхронизированного с сетью, подведена механическая мощность, то это еще не значит, что эта машина стала отдавать в сеть электрическую мощность — генератор сначала должен покрыть потери в своей обмотке якоря.
Учет всех факторов, включая потери в стали, существенно усложняет и векторные диаграммы, и расчетные формулы. Поэтому в инженерных расчетах обычно пользуются упрощенной теорией синхронной машины, лишь по мере необходимости вводя дополнительные факторы, уточняющие и одновременно усложняющие эту теорию.
Видео:2018 12 09 синхронное вращениеСкачать

Качания синхронных машин
Допустим, что машина работает при некоторой нагрузке и развивает электромагнитный момент M1 =Mвн1, соответствующий углу Θ1 (рис. 6.59, а и б). Если резко увеличить внешний момент до величины Mвн2, то нагрузочный угол будет увеличиваться до величины Θ2, соответствующей новому значению электромагнитного момента M2 =Mвн2. Однако из-за инерции ротора нагрузочный угол, увеличиваясь, достигает значения Θ3 > Θ2, а затем под действием синхронизирующего момента начинает уменьшаться до величины Θ4
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала
🎥 Видео
Синхронное вращениеСкачать

Что скрывает темная сторона Луны? Синхронное вращениеСкачать
Почему мы Видим Только Одну Сторону Луны?Скачать
Синхронный двигатель. Устройство, принцип работы, подключение, применениеСкачать
Синхронное вращение головамиСкачать
Чем отличается асинхронный электро двигатель от синхронного, как устроен электро двигательСкачать
Вращение планеты Земля | Лекции по астрофизике – Леонид Зотов | НаучпопСкачать
Почему Венера вращается в обратную сторонуСкачать
Veritasium: тайна синхронизацииСкачать
Чем же она так провинилась? 😆 #фигурноекатание #этеритутберидзе #олимпиада #щербакова #загитоваСкачать
Вращается ли луна вокруг своей оси? Кьюбит Шоу #2Скачать
вращение 360°в группировке фигура синхронное плаваниеСкачать
Самые громкие травмы в гимнастике 🥺Скачать
#001."Звезда" или "Треугольник"?Скачать













