
Для плавности увеличения и уменьшения скорости вращения вала существует специальный прибор – регулятор оборотов электродвигателя 220в. Стабильная эксплуатация, отсутствие перебоев напряжения, долгий срок службы – преимущества использования регулятора оборотов двигателя на 220, 12 и 24 вольт.
Способы изменения вращения зависят от модели электрической машины. Характеристики электрических машин отличаются: постоянного и переменного тока, однофазные, трехфазные. Поэтому говорить нужно о каждом случае отдельно.
- Простейший вариант
- В цепи якоря
- Для низкого напряжения
- От сети
- Коллекторные машины
- Двухфазный двигатель
- Обычные асинхронники
- Выбираем устройство
- Прибор триак
- Преобразователи на электронных ключах
- Процесс пропорциональных сигналов
- Измерения
- Плавность хода, шум и момент шагового двигателя при управлении микроконтроллером
- 🌟 Видео
Видео:Вентилятор медленно крутится. Ремонт. Причина - не мотор.Скачать

Простейший вариант
Легче всего изменять обороты электродвигателя постоянного тока. Они меняются простым изменением напряжения питания. Причем неважно где: на якоре или на возбуждении, но это касается только маломощных машин с минимальной нагрузкой. В основном управление скоростью вращения производят по цепи якоря. Более того, здесь возможно реостатное регулирование, если мощность мотора небольшая, или есть довольно мощный реостат.
Это самый неэкономичный вариант. Механические характеристики двигателя с независимым возбуждением самые невыгодные из-за больших потерь, результатом чего является падение механической мощности, КПД.
Еще одна возможность – введение реостата в обмотку возбуждения. Рассматривая характеристики двигателя с независимым возбуждением, увидим, что регулирование скорости вращения возможно только в сторону увеличения оборотов. Это происходит ввиду насыщения обмотки.
Итак, реостатное регулирование скорости вращения аппарата независимого возбуждения оправдано в системах с минимальной нагрузкой. Лучше всего, когда работа при таком включении буде периодической.
Видео:Как увеличить обороты и мощность коллекторного двигателяСкачать

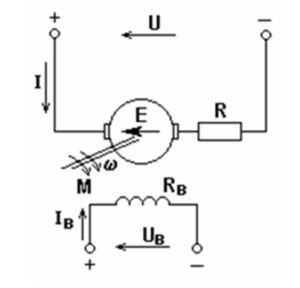
В цепи якоря
Это лучший вариант регулирования скорости мотора с независимым возбуждением. Частота вращения прямо пропорциональна подводимому к якорю напряжению. Механические характеристики не меняют своего угла наклона, а перемещаются параллельно друг другу.
Для осуществления этой схемы нужно цепь якоря подключить к источнику напряжения, которое можно менять.
Это возможно в электрических машинах малой или средней мощности. Двигатель большой мощности целесообразно подключить в схему с генератором напряжения независимого возбуждения.
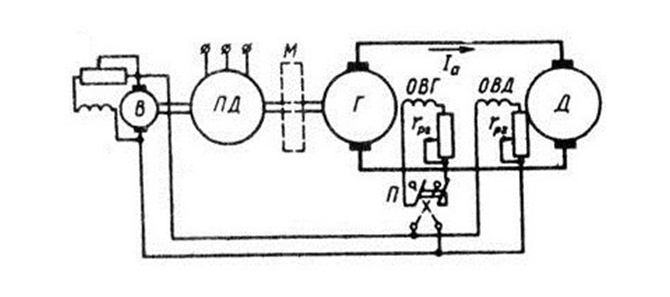
В качестве привода для генератора используют обычный трехфазный асинхронник. Чтобы уменьшить обороты, достаточно на якоре понизить напряжение. Оно меняется от номинального и вниз. Эта схема имеет название «двигатель-генератор». Таким образом можно менять параметры на двигателе 220в.
Для низкого напряжения
Управление агрегатами на 12в проще из-за более низкого напряжения и как следствие, более доступных деталей. Вариантов подобных схем множество, поэтому важно понять сам принцип.
Такой двигатель имеет ротор, щеточный механизм и магниты. На выходе у него всего два провода, контролирование скорости идет по ним. Питание может быть 12, 24, 36в, или другое. Что нужно – это его менять. Лучше, когда в пределах от нуля до максимума. В более простых вариантах 12–0в не получится, другие варианты дают такую возможность.
Кто-то паяет радиоэлементы навесным монтажом, кто-то набирает печатную плату – это уже зависит от желания и возможностей каждого человека.
Этот вариант подойдет, если точность неважна: например, вентилятор. Напряжение меняется от 0 до 12 вольт, пропорционально меняется крутящий момент.
Другой вариант – со стабилизацией оборотов независимо от нагрузки на валу.
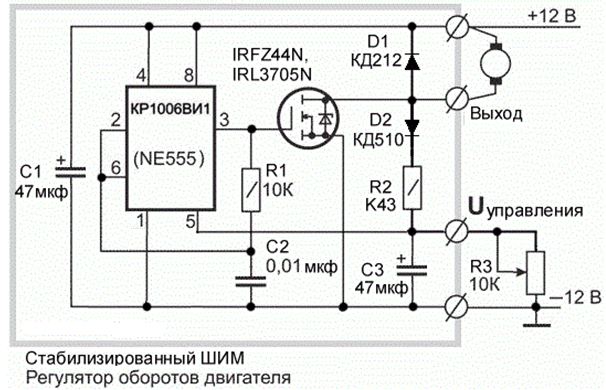
Питание 12 вольт, схема очень проста. Двигатель набирает обороты плавно, и также плавно их сбавляет так как напряжение на выходе меняется в пределах 12–0в. Как результат – можно убрать крутящий момент практически до нуля. Если потенциометр крутить в обратном направлении, мотор так же постепенно набирает обороты до максимума. Микросхема очень распространенная, ее характеристики тоже подробно описаны. Питание 12–18в.
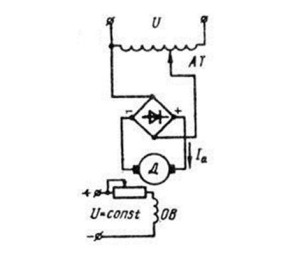
Есть еще один вариант, только это уже не для 12, а для 24в питания.
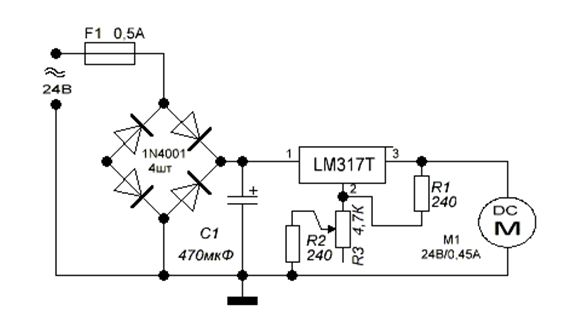
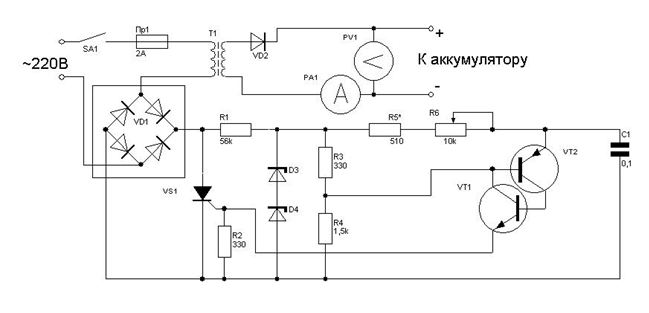
Двигатель постоянного тока, питание – переменное, так как стоит диодный мост. При желании можно мост выбросить и запитывать постоянкой от своего блока питания.
Видео:Регулятор оборотов электродвигателя своими рукамиСкачать

От сети
Однофазные электродвигатели переменного тока также позволяют регулировать вращение ротора.
Коллекторные машины
Такие моторы стоят на электродрелях, электролобзиках и другом инструменте. Чтобы уменьшить или увеличить обороты, достаточно, как и в предыдущих случаях, изменять напряжение питания. Для этой цели также есть свои решения.
Конструкция подключается непосредственно к сети. Регулировочный элемент – симистор, управление которого осуществляется динистором. Симистор ставится на теплоотвод, максимальная мощность нагрузки – 600 Вт.
Если есть подходящий ЛАТР, можно все это делать при помощи его.
Двухфазный двигатель
Аппарат, имеющий две обмотки – пусковую и рабочую, по своему принципу является двухфазным. В отличие от трехфазного имеет возможность менять скорость ротора. Характеристика крутящегося магнитного поля у него не круговая, а эллиптическая, что обусловлено его устройством.
Есть две возможности контролирования числа оборотов:
- Менять амплитуду напряжения питания (Uy),
- Фазное – меняем емкость конденсатора.
Такие агрегаты широко распространены в быту и на производстве.
Обычные асинхронники
Электрические машины трехфазного тока, несмотря на простоту в эксплуатации, обладают рядом характеристик, которые нужно учитывать. Если просто изменять питающее напряжение, будет в небольших пределах меняться момент, но не более. Чтобы в широких пределах регулировать обороты, необходимо довольно сложное оборудование, которое просто так собрать и наладить сложно и дорого.
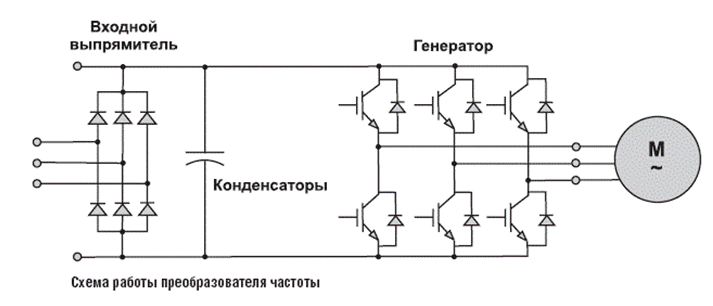
Для этой цели промышленностью налажен выпуск частотных преобразователей, помогающих менять обороты электродвигателя в нужном диапазоне.
Асинхронник набирает обороты в согласии с выставленными на частотнике параметрами, которые можно менять в широком диапазоне. Преобразователь – самое лучшее решение для таких двигателей.
Видео:Не хватает мощности двигателя, что делать? Есть выход!Скачать

Выбираем устройство
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
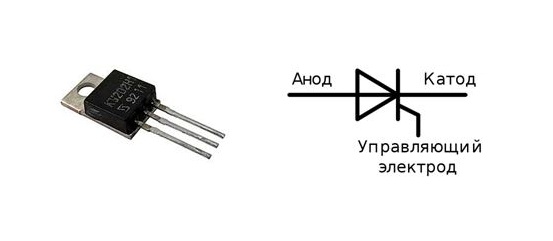
Прибор триак
Устройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Видео:Однофазный асинхронный двигатель гудит и не крутится. Асинхронный двигательгреетсяСкачать

Преобразователи на электронных ключах
Тиристорные регуляторы мощности являются одними из самых распространенных, обладающие простой схемой работы.
Читайте также: Мотор генератор адамса без сердечника
Тиристор, работает в сети переменного тока.
Отдельным видом является стабилизатор напряжения переменного тока. Стабилизатор содержит трансформатор с многочисленными обмотками.
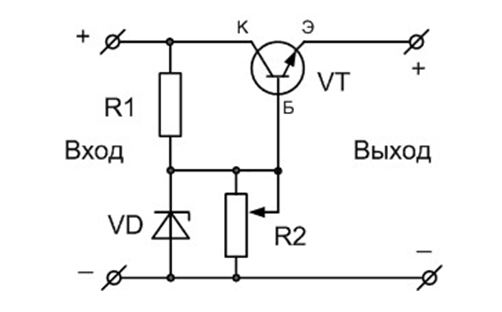
Схема стабилизатора постоянного тока
Зарядное устройство 24 вольт на тиристоре
Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Процесс пропорциональных сигналов
Сигналы, поступающие на вход системы, образуют обратную связь. Подробнее рассмотрим с помощью микросхемы.
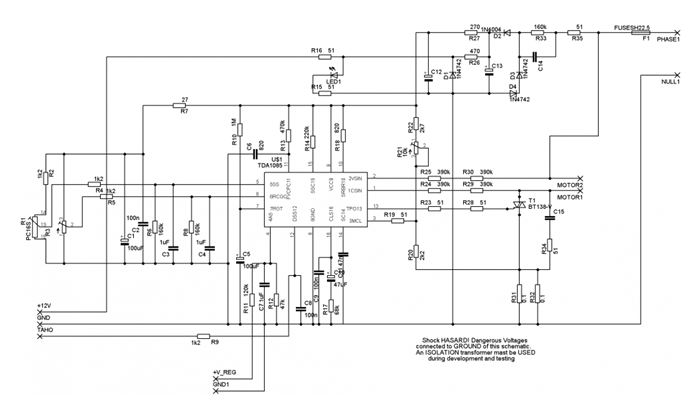
Микросхема TDA 1085, изображенная выше, обеспечивает управление электродвигателем 12в, 24в обратной связью без потерь мощности. Обязательным является содержание таходатчика, обеспечивающего обратную связь двигателя с платой регулирования. Сигнал стаходатчика идёт на микросхему, которая передаёт силовым элементам задачу – добавить напряжение на мотор. При нагрузке на вал, плата прибавляет напряжение, а мощность увеличивается. Отпуская вал, напряжение уменьшается. Обороты будут постоянными, а силовой момент не изменится. Частота управляется в большом диапазоне. Такой двигатель 12, 24 вольт устанавливается в стиральные машины.
Своими руками можно сделать прибор для гриндера, токарного станка по дереву, точила, бетономешалки, соломорезки, газонокосилки, дровокола и многого другого.
Промышленные регуляторы, состоящие из контроллеров 12, 24 вольт, заливаются смолой, поэтому ремонту не подлежат. Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
При сборе регулятора правильно выбирать резистор. Так как при большом резисторе, на старте могут быть рывки, а при маленьком резисторе компенсация будет недостаточной.
Важно! При регулировке контроллера мощности нужно помнить, что все детали устройства подключены к сети переменного тока, поэтому необходимо соблюдать меры безопасности!
Регуляторы оборотов вращения однофазных и трехфазных двигателей 24, 12 вольт представляют собой функциональное и ценное устройство, как в быту, так и в промышленности.
Видео:Разновидность неисправности якоря коллекторного мотора. Упали обороты и пошел запах.Скачать

Измерения
Понятно, что число оборотов нужно как-то определять. Для этого используют тахометры. Они показывают число вращения на данный момент. Обычным мультиметром просто так измерить скорость не получится, разве что на автомобиле.
Как видно, на электрических машинах можно менять различные параметры, подстраивая их под нужды производства и домашнего хозяйства.
Видео:Почему стартер крутит медленно.Неисправности стартераСкачать

Плавность хода, шум и момент шагового двигателя при управлении микроконтроллером
Далее опишу алгоритм управления ШД с помощью микроконтроллера.
Перед тем, как начать описывать задачу, я изложу основы управления ШД, которые будут включать необходимый минимум для рассмотрения, описанных в статье способов управления.
Рассмотрим необходимый минимум основ управления ШД , необходимый для понимания принципа управления, описанного ниже. А именно:
Способы подключения обмоток, необходимые для осуществления данного режима работы. Полношаговый режим управления при задействовании на один шаг двух фаз.
Изменение полярности обмотки с помощью Н-моста.
Принципиальная электрическая схема, включающая в себя 4 драйвера полумоста и 2 Н-моста.
Способ модуляции синусоидального сигнала с помощью широтно-импульсной модуляции (далее просто ШИМ).
ШД имеют 4,5,6 или 8 выводов обмоток. При подключении к модулю управления ШД в каждом конкретном случае необходимо задействовать определенные выводы. В четырех выводном ШД задействуются все четыре вывода. Пяти выводной ШД не подходит для метода управления, описываемого в этой статье. В шести выводном не задействуются выводы нейтральных точек. В восьми выводном ШД обмотки соединены последовательно (см. рис. 1). Конечно можно задействовать все выводы обмоток, но эти методы управления выходят за рамки статьи.
Описание полношагового режима управления.
Для управления ШД необходимо подавать определенную последовательность сигналов на обмотки ШД . По сути создавая статором бегущую волну, заставляющую синхронно вращаться поле статора и ротора ШД . На рис. 2 над диаграммой схематично показан статор с обмотками. Цвет обмоток указывает на их полярность. В центре находится ротор в виде магнита. Если обратить внимание на диаграмму, то будет видно, что в середине каждого шага идет поочередное изменение полярности обмоток. В след за изменяющимся полем статора, вращается ротор по часовой стрелке. Для изменения вращения двигателя можно поменять местами выводы одной обмотки, и ротор начнет вращаться в противоположную сторону. Но зачем менять подключение обмоток, если можно программным путем поменять местами подаваемые сигналы, что и сделано с А+ и А- на рис.2. При этом ротор также начнет вращаться в противоположную сторону. Для большей наглядности сигнал на диаграмме имеет прямоугольную форму. Далее в статье прямоугольный сигнал будет заменен на сигнал ШИМ, модулирующий синусоиду.
Изменить полярность обмотки можно с помощью Н-транзисторного моста (см. рис. 3). В первом варианте из 4 транзисторов открыты Т1,Т4. Ток, соответственно, течет через них. Поменять полярность можно, открыв транзисторы Т2 ,Т3 и при этом закрыв Т1 И Т4. Таким образом, ток через обмотку потечет в противоположную сторону.
Для управления ШД используют два Н моста чаще всего на основе восьми N-канальных MOSFET транзисторов. Для управления транзисторами используются мостовые или полумостовые драйверы. Напряжение на затворе зачастую должно быть выше напряжения истока транзистора на 5-15В. Для MOSFET транзисторов это делают драйверы.
Кроме того, драйверы силовых ключей, в отличие от простых преобразователей уровня, снабжены множественными механизмами защиты как самого драйвера, так и управляемых ключей. Это позволяет выполнять формирование выходных управляющих сигналов согласно определенным алгоритмам, чтобы предотвратить выход системы из строя в аварийной ситуации.
Механизм встроенного временного промежутка Dead-Time обеспечивает гарантированное закрытие одного силового ключа до момента начала открытия ключа в противоположном плече. Гарантией надежного закрытия противоположного транзистора является встроенная схема, контролирующая состояние ключей и наличие схемы задержки, формирующей промежуток времени, в течение которого закрыты оба транзистора в плечах полумоста.
На рис.4 приведена принципиальная электрическая схема управления ШД, включающая в себя 4 драйвера полумоста IR2104S и 2 Н-моста на основе транзисторов IRF7836. При подаче 0 В на вход SD драйвера IR2104s драйвер переходит в неактивное состояние.
На приведенной схеме сигнал с диаграмм можно подавать на 4 входа. Так на ШИМ1 А+, на ШИМ2 А-, на ШИМ3 В+, на ШИМ4 В- соответственно (Рис.4).
Ниже кратко опишу принцип работы ШИМ, расчет и модулирование синусоиды.
ШИМ или PWM (широтно-импульсная модуляция или pulse-width modulation) – это способ изменения мощности, подаваемой на нагрузку. Управление заключается в изменении ширины импульса постоянной амплитуды, следующих через равные интервалы времени.
Читайте также: Крепление мотора мопеда альфа
На рис.5 видно, как регулируется мощность. Так 20%, 40%, 80%, 100% это время, когда транзистор открыт относительно времени периода. Соответственно среднее напряжение будет приблизительно равно 20%, 40%, 80%, 100% от максимального.
Меняя ширину импульса, можно модулировать различную форму сигнала. Так, по синусоидальному закону, при котором ширина импульсов изменяется следующим образом (рис. 6), максимальна в середине шага, а к началу и концу шага уменьшается. Синусоиду можно увидеть на осциллографе, пропустив ШИМ-сигнал с контроллера через RC фильтр. Для RC фильтра использовал конденсатор 2.2 нФ и резистор 1.5кОм.
На рис. 6 показан пример модуляции одного синусоидального шага, состоящего всего из 4 уровней напряжения. Напряжение питания 12В.
Для формирования модулированного сигнала необходимо рассчитать уровни ШИМ и их количество на один шаг. На рис.7 приведено два примера одного синусоидального шага с разным количеством ШИМ уровней, где ШИМ можно изменять в пределах от 0 до 255, что соответствует напряжению от 0 до 100%. Как видно на рис.7, чем больше уровней ШИМ, тем больше форма модулированного сигнала будет повторять синусоиду. Каждое изменение ШИМ происходит по прерыванию таймера в микроконтроллере. Меняя время срабатывания прерывания, можно регулировать время одного шага соответственно и скорость двигателя.
Формулу для расчета ШИМ уровней можно получить из формулы мгновенных значений синусоидальных функции. U = Um*sin(ω*t + Ψ)
Um — амплитудное значение ω — угловая частота Ψ — начальный фаза, значение фазы в начальный момент t=0 аргумент ω*t + Ψ – называют фазой синусоидальной функции
Синусоида от 0 до Т/4 повторяет форму половины шага, а от T/4 до Т/2 зеркально отображает вторую половину шага. Поэтому для расчета достаточно взять участок от 0 до Т/4 или от 0° до 90°. ωt – для удобства можно заменить на угол α = 0° до 90°. Um заменим на максимальное значение ШИМ_max в примере 255. U заменим на ШИМ_N. Получается ШИМ_N = ШИМ_maxSIN(α). Количество вычислений уровней ШИМ зависит от величины точности к примеру 16 с шагом угла 90°/16 = 5,625°
Значения ШИМ необходимо округлять, так как оно может быть только целым.
Вычислив уровни ШИМ, можно модулировать синусоиду. Для этого я занес значения уровней в массив по прерыванию от таймера, поочередно подставляя значения от ШИМ_0 до ШИМ_16 в ШИМ контроллера. Так модулируется половина шага. Для модуляции второй половины нужно наоборот подставлять значения от ШИМ_16 до ШИМ_0.
Так модулируется один шаг. Меняя время срабатывания таймера можно менять время шага. Теперь такие синусоидальные шаги можно подавать, заменив прямоугольные шаги на диаграммах (рис.2).
Для удобства я написал небольшую программу для расчета значений ШИМ . Где PWM_MAX присваивается максимальное значение ШИМ, которое настраивается в микроконтроллере, а sampling присваивается количество уровней ШИМ на половину шага. Так как большинство программируют МК на языке С, данную программу я решил написать на этом же языке.
0 25 50 74 98 120 142 162 180 197 212 225 236 244 250 254 255
На этом необходимый минимум основ управления ШД завершается. Далее будет описана поставленная задача, возникшие трудности и их решение.
Задача: Двигатель должен вращать массу около 7кг за 0,7 — 1 секунду на 90°. Угол поворота отслеживает 10 разрядный или 1024 битный абсолютный энкодер AS5040 закрепленный на валу механизма. При достижении 90° необходимо включить режим удержание ШД. При этом необходимо учитывать воздействие руки человека, толкающей механизм по направлению движения или против, либо удерживающей вплоть до остановки. При этом напряжение питания блока управления ограничено двенадцатью вольтами, а габариты двигателя ограничены по ширине 100мм, а по длине 110мм, включая длину вала. В наличии было три двигателя подходящих габаритов.
Осовные характеристики двигателей:
двигатель №1 Рабочий ток 3,1 А. Активное сопротивление обмотки 1,5 Ом Индуктивность обмотки 3,5 мГн. Момент удержания 0,3 кг*м Величина полного шага 1,8° (200 шагов на один оборот ротора).
двигатель №2 Рабочий ток 4А. Активное сопротивление обмотки 0,8 Ом. Индуктивность обмотки 3,1 мГн. Момент удержания 0,45 кг*м. Величина полного шага 1,8° (200 шагов на один оборот ротора).
двигатель №3 не соответствовал характеристикам, заявленным производителем. Производитель утверждал, что он является аналогом двигателя №2. При замере активного сопротивления обмоток выяснилось, что сопротивление не соответствовало заявленным 0,8 Ом, а составляло всего 0,2 Ом. Следовательно, рабочий ток и индуктивность тоже отличались.
Изначально решить поставленную задачу я планировал с помощью готового блока управления ШД. Было испытано около пяти готовых блоков управления ШД разной ценовой категории и разных производителей. У всех были приблизительно одни и те же результаты, которые будут описаны ниже.
При испытании двигатель №3 по шуму и вибрациям отличался от первых двух в худшую сторону. Также было замечено, что все блоки управления с этим двигателем сильно грелись. Было решено больше не использовать этот двигатель.
Проблема №1. Свист двигателя. При уменьшении тока на блоках управления шум становился меньше, двигатель более плавно вращает ротор, и всё-таки шум и плавность вращения оставляли желать лучшего. При увеличении дробления шага на блоках управления до 1/16 шум уменьшился, и плавность хода увеличилась, но эти улучшения были незначительны. Дальнейшее повышение дробления вплоть до 1/512 не привело к улучшению показателей.
Решение проблемы №1. Решил сделать свой драйвер управления ШД на основе микроконтроллера PIC18F2331. Он заточен под управление двигателями. Было задействовано 4 канала широтно-импульсной модуляции для управления 4 драйверами полумоста.
Я начал эксперименты с формой сигнала, модулируемого с помощью ШИМ. Подавал треугольный, прямоугольный, трапециевидный сигналы на обмотки двигателя. Результаты: неутешительные показатели по шуму, вибрации и плавности хода были значительно хуже по сравнению с готовыми блоками управления. Подавая на обмотки двигателя синусоидальный сигнал, плавность хода, начиная от 5 об/мин и выше, стала практически незаметной на глаз. Детали механизма не гремели, но если скорость была ниже 5 об/мин, детали гремели, механизм передвигался рывками, ток потребляемый двигателем рос и выходил за пределы рабочего тока двигателя. Что касается шума, даже при скорости выше 5 об/мин был неприятный шум. Свист похожий на звук, издаваемый зарядными устройствами для телефонов ноутбуков, только гораздо сильнее. Такой же шум я слышал от асинхронных двигателей, управляемых частотными преобразователями. Изучив работу частотных преобразователей, стало ясно, что свист зависит от частоты ШИМ. У меня частота ШИМ составляла 4кГц. При изменении частоты свист менялся, и когда я поднял частоту до 20кГц, шум полностью пропал. Слух человека в большинстве случаев не воспринимает частоту выше 20кГц.Так была решена проблема №1.
Читайте также: Неисправности лодочного мотора сузуки 5 л с четырехтактный
Проблема №2. Двигатель ниже 5 об/мин двигается рывками, а ток сильно возрастает, так как у драйвера нет обратной связи по току, соответственно и контроля по перегрузке тоже нет.
Решение проблемы №2. Когда напряжение питания драйвера с 12V снизил до 9V, рывки при передвижении механизма тоже стали меньше, но всё равно недостаточно плавно. Тогда напряжение выставил 12V, а амплитуду ШИМ синусоиды начал уменьшать, и при 20% амплитуды от максимума движение было плавным и тихим.
Проблема №3. Если запустить двигатель сразу на большой скорости без разгона, то момент на валу двигателя будет недостаточным для вращения механизма. Начнется пропуск шагов, сопровождаемый сильным шумом, который распространяется по всему корпусу механизма. Звук напоминал ведро с болтами, которое трясут изо всех сил. Так как необходимо было провернуть механизм на 90° за 0,7 — 1 сек., я решил, что до 45° буду линейно ускоряться, а с 45° до 90° линейно замедляться. Достигнуть даже приближённо времени в 1сек не удалось. Еще было замечено при старте, что первый шаг периодически сопровождался рывком ротора. Это связанно с тем, что зубцы ротора могут находиться не на оси включенной обмотки статора. В следствие чего зубцы ротора стремительно притянутся к обмотке, произойдёт фиксация ротора, сопровождающаяся звуком, похожим на удар. Все последующие шаги будут плавными.
Решение проблемы №3 . Рассматривая график зависимость оборотов двигателя и момента, я заметил, что момент при малых оборотах высокий, а с увеличением оборотов нелинейно падает, и чем меньше напряжение питания, тем хуже зависимость.
Для примера покажу график Рис.9. Взятый из даташита.
На двигатель FL86STH156-6204 ток фазы 6,0 А. Максимальный постоянный ток потребления от источника питания 3,8 А для блока SMD-9.0 Блоки управления SMD-9.0 (напряжение 72В) и SMD-82 (напряжение 220В) Дробление шага ½, источник питания 72 В, 300 Вт.
Чем больше напряжение подается на обмотки ШД, тем быстрее идет нарастание тока в них. Соответственно зависимость момента от скорости улучшается.
В моем случае питание 12В и диапазон допустимых скоростей невысок, так как момент стремительно падает с увеличением скорости.
Так как при равномерном ускорении не удавалось разогнать механизм. Я решил разделить ускорение на три диапазона. Первый при скорости ниже 5 об/мин ускорение максимально, так как момент максимально высокий. Второй диапазон от 5 до 7 об/мин ускорение уже в три раза меньше и последний третий диапазон от 7 об/мин и выше, ускорение в десять раз меньше относительно первого диапазона. Таким образом двигатель набирал максимально быстро скорость в начале пути и укладывался в 1с. Нелинейно разгоняя двигатель, можно значительно сократить время разгона ШД. Замедление механизма проходило в обратном порядке. Так как сохраненной осциллограммы сигнала, подаваемого на драйверы полумостов, у меня не осталось, я нарисовал, как, примерно, должна выглядеть осциллограмма.
При старте, первый шаг периодически сопровождался рывком ротора. Удар можно убрать, путем снижения амплитуды первой половины шага (в моем случае 20% от максимума) и значительно увеличив время первой половины шага по сравнению с другими шагами. Как видно на рис.10, первые половины шагов более вытянуты, чем правые. Это связанно с ускорением. Форма синусоиды искажается, но при этом двигатель работает достаточно плавно и тихо. Как видно на рис.10, ускорение максимально, это заметно по сужению шагов в начале движения. Когда момент максимален, а по мере приближения к максимальной скорости ускорение значительно меньше от изначального. Все диапазоны ускорений подбирались экспериментальным путем. Как регулировать амплитуду и ускорение я описал ранее в этой статье.
Проблема №4. Учет воздействия руки на механизм, если не учитывать воздействие руки, то можно было обойтись парой индуктивных датчиков или оптических датчиков для отслеживания крайних положений и направления вращения. А если учитывать воздействие руки, то без датчика угла поворота (абсолютного энкодера) не обойтись. Если механизм находится в движении, а рука хватает его и удерживает на месте, начинается пропуск шагов и сильный шум. По датчику будет видно, что вал колеблется на месте, и двигатель необходимо отключить и попытаться стартовать через заданный промежуток времени. Эта задача легко решаема. Если рука потянула механизм против направления, по датчику можно легко понять, что механизм вращается в противоположную сторону, и тоже отключить двигатель. И совсем другое дело, воздействие на механизм с увеличением скорости перемещения больше заданной изначально или наоборот притормаживание. Логично было измерять скорость перемещения и подстраиваться, чтобы скорость двигателя совпадала с движением руки, но оказалось, что 10 разрядный датчик as5040 не позволял этого сделать. Предположим, что нужно отслеживать перемещение каждые 1,05° .Так как 10 разрядов это 1024 бита, то вычисляем точность 360°/1024 = 0,35°, количество градусов на один бит возьмём 0,35°3 = 1,05°. Зная время, за которое двигатель проходит 1,05°, можно вычислить скорость. Но не все так просто. У датчика есть погрешность — биение младшего бита, то есть погрешность в один бит, а при измерении скорости нужно сделать два замера пройденного пути. В начале и в конце соответственно погрешность удваивается и составляет 0,35°2=0,7°. Измерить скорость каждые 1,05° невозможно. Логично измерять, например, каждые 0,35°*15=5,25°. Уже можно оценить скорость, но 5,25° это слишком большой угол, двигатель успеет пройти почти 3 шага или более точно 5,25°/1,8°= 2,92.
Решение проблемы №4. Целесообразно для измерения скорости использовать 12 разрядный датчик это 4096 бит. Точность измерения увеличится в четыре раза, что позволит точно подбирать скорость движения механизма под скорость движения руки.
Так была решена последняя проблема.
Думаю, эта статья принесет практическую пользу и поможет читателю лучше понять принципы управления шаговым двигателем.
В данной статье я опишу решение поставленной мне задачи по снижению шума и повышению плавности движения механизма, движимого шаговым двигателем (далее просто ШД) при ускорении. Данная задача довольна специфична. Описанное мною решение будет полезно при разработке модулей управления ШД .
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала
🌟 Видео
Как подключить однофазный двигатель, что-бы он крутился в другую сторонуСкачать

Гудит и греется электродвигатель. ПричинаСкачать
Реверс мотора с помощью одного выключателя.Без Н-моста и релеСкачать
Как подключать МОЩНЫЙ МОТОР без конденсатора В РОЗЕТКУСкачать
Вентилятор напольный медленно крутит (ремонт вентилятора)/ Repair of the fanСкачать
Тяжело крутит стартер!Скачать
РЕГУЛЯТОР ОБОРОТОВ двигателя стиральной машины с Aliexpress. Подключение, реверс, схемаСкачать
Машинка плохо крутится и останавливается? (подробно ссылка в конце видео и в описании)Скачать
Частая проблема с моторколёсамиСкачать
Как нужно «жарить» на машине, чтобы спасти мотор от отложений?Скачать
Долгий запуск двигателя.Причины плохого запуска двигателя. Долго крутит стартер.Скачать
ТОП 7 Причин перегрева электромотора! Асинхронный!Скачать
ПОЧЕМУ ПЛОХО КРУТИТ СТАРТЕР И ПРИ ЭТОМ ЗАПУСКАЕТСЯ АВТОСкачать












