

В качестве датчиков частоты вращения в системах автоматики применяют тахогенераторы — маломощные электрические машины постоянного и переменного тока. Для преобразования частоты вращения электродвигателей в напряжение применяют тахометрические мосты.
Тахогенераторы постоянного тока
Тахогенераторы постоянного тока в зависимости от способа возбуждения выполняют двух типов: магнитоэлектрические (возбуждаемые от постоянных магнитов) и электромагнитные (возбуждаемые от специальной обмотки) (рис. 1 а, б).
Напряжение на выходе тахогенератора при постоянном потоке возбуждения U вых = Е — IR я = Се ω — IR я
где Се = ( U я — I я R я)/ ω — постоянная машины, определяется из паспортных данных.
На холостом ходу ( I =0) напряжение U вых = Е = Се ω . Следовательно, статическая характеристика тахогенератора U вых = f ( ω) при холостом ходе линейна, так как Се = const (прямая I, рис. 1, в).
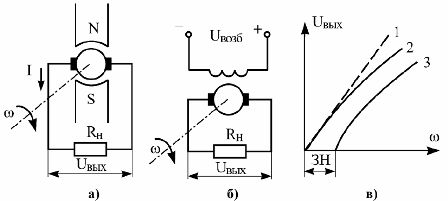
Рис. 1. Датчики частоты вращения (тахометрические генераторы постоянного тока): а) с возбуждением от постоянных магнитов, б) с электромагнитным возбуждением, в) статическая характеристика
При нагрузке статическая характеристика становится нелинейной (кривая 2). изменяется ее наклон, что является следствием реакции якоря и падения напряжения в обмотке якоря тахогенератора. В реальных тахогенераторах возникает падение напряжения на щетках, что приводит к появлению юны нечувствительности (кривая 3).
Для уменьшения искажения статических характеристик тахогенераторов используют при небольших нагрузках ( I н = 0,01 — 0,02 А). Ток в цепи якоря I я = Е/( R я + R н), а выходное напряжение U вых = Е — IR я = Се ω — IR я.
Тахогенераторы постоянного тока широко применяются в автоматических системах регулирования электроприводов в качестве датчиков частоты вращения. Их достоинства — малая инерционности высокая точность, малые габариты и масса, а для магнитоэлектрических тахогенераторов еще и отсутствие источника питания. Недостаток — наличие коллектора со щетками.

Тахогенераторы переменного тока
Синхронные тахогенераторы — однофазная синхронная машина с ротором в виде постоянного магнита (рис. 2, а), У синхронных тахогенераторов с изменением угловой скорости вместе с амплитудой изменяется и частота выходного напряжения. Статические характеристики нелинейны. В динамической отношении синхронные тахогенераторы являются безинерционными элементами.
Асинхронный тахогенератор — это двухфазная асинхронная машина с полый немагнитным ротором (рис. 2, б). На статоре асинхронного тахогенератора размещаются две сдвинутые на 90 обмотки (возбуждения ОВ и генератора ОГ). Обмотка ОВ подключается к источнику переменного тока.
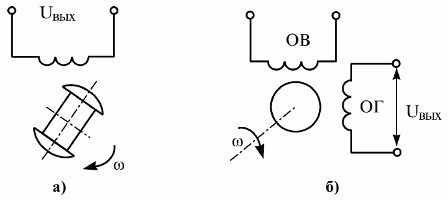
Рис. 2. Тахомерические генераторы переменного тока: а — синхронный, б — асинхронный
В обмотке OГ, являющейся выходной, при вращении ротора наводятся э.д.с. трансформации и вращения. Под действием э.д.с. вращения на выходе тахогенератора возникает напряжение U вых.
Статическая характеристика асинхронного тахогенератора также нелинейна. При изменении вращения ротора фаза выходного напряжения изменяется на 180°.
Асинхронные тахогенераторы используют как датчики угловой скорости, частоты вращения и ускорений. В последнем случае обмотка возбуждения асинхронного тахогенератора подключается к источнику постоянного тока.
Читайте также: Ремонт компрессоров кондиционера в нижнем новгороде авто
Достоинства асинхронных тахогенераторов — надежность, малая инерционность. Недостатки — наличие на выходе остаточной э.д.с. при неподвижном роторе, относительно большие габариты.

Тахометрические мосты постоянного и переменного тока применяют в системах автоматики для создания обратной связи но частоте вращения электрических двигателей. Это позволяет упростить систему, так как отпадает необходимость в дополнительной электрической машине — тахогенераторе. При этом уменьшаются статические и динамические нагрузки на исполнительный двигатель.
Тахометрический мост постоянного тока представляет собой специальную мостовую схему (рис. 3, а), в одно из плеч которой включен якорь двигателя R я, а в другие — резисторы R1 , R2 , R п. К диагонали а b моста подводится напряжение сети U, питающее якорь двигателя, а с диагонали cd снимается напряжение U вых пропорциональное угловой скорости ω.
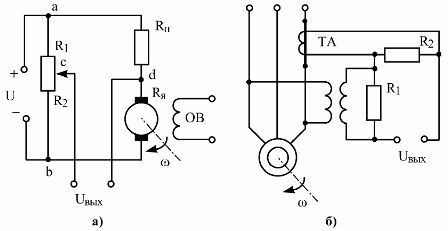
Рис. 3. Тахометрический мост постоянного тока (а) и бесконтактное измерительное устройство частоты вращения асинхронного двигателя (б)
Если ток в выходной цепи отсутствует, то

Решая совместную систему уравнений, получим

Напряжение на выходе тахометрического моста

где Kтм — коэффициент передачи тахометрического моста.
Погрешность тахометрического моста составляет ±(2 — 5)%. В динамическом отношении тахометрические мосты постоянного тока являются безинерционным звеном.
Для контроля частоты вращения ротора асинхронного электродвигателя применяют бесконтактное измерительное устройство (рис. 3, б), содержащее измерительный трансформатор тока ТА и напряжения TV.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Датчик оборотов двигателя для контроллера
Понадобилось на работе контролировать обороты двигателя. Решили использовать датчик Холла. На муфту установленную на валу двигателя приклеили пару неодимовых магнитов. Для датчика Холла сделали схему на компараторе, чтобы фиксировать моменты прохождения магнита напротив датчика. Схема приведена на рис.1
Рис. 1 Принципиальная схема тахометра
Описание работы
Датчик Холла AHSS49 на каждый проход магнита, закрепленного на валу двигателя формирует импульс амплитудой около 1 вольта, со смещением относительно земляной шины на +2,5 В.
Полученный сигнал поступает на вход компаратора IC1 LM311, который формирует управляющие импульсы для выходной опто-развязки OC1 PC817, выход которой присоединяется ко входу контроллера, подтянутому через сопротивление 1-2 кОм к питанию контроллера. В промышленных контроллерах, такие резисторы предустановлены и требуется только конфигурирование входных цепей. Порог срабатывания компаратора IC1 настроен на напряжение 2,6 В. Настраивая компаратор на более высокое напряжение можно получить более узкие импульсы на выходе — это связано с тем, что импульсы на выходе датчика Холла имеют форму близкую к треугольной.
Конденсаторы С1, С2 предназначены для снижения импульсных помех и исключения ложных срабатываний компаратора.
Схема была смакетирована на самодельной монтажной плате см. рис.2 Для публикации была подготовлена разводка печатной платы см. Приложения к статье.
Читайте также: Кардан рулевого вала нивы
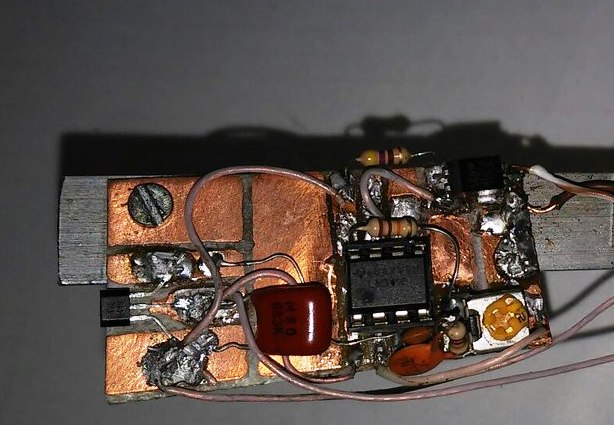
Рис.2 Макет схемы усиления сигнала датчика Холла
Установка датчика около муфты вала двигателя см.рис.3 Датчик Холла был установлен таким образом, чтоб при прохождении магнитов установленных на муфте они оказывались на расстоянии пимерно 5 мм напротив датчика Холла. При установке на валу двух магнитов результирующая частота на выходе платы удваивается. При установке 4 магнитов возрастает в 4 раза. Большее число магнитов устанавливается для подсчета частоты вращения низко-оборотных двигателей. Соответственно, при измерении частоты вращения двигателя результат делится на число магнитов установленных на валу двигателя.

Рис.3 Установка датчика на кронштейне вблизи муфты на валу двигателя
Выход тахометра может быть организован несколькими способами в зависимости от решаемых задач
Схема приведенная на рис. 1 при работе с промышленными контроллерами может не дать устойчивого срабатывания на каждый импульс поскольку 2 p-n перехода опто-развязки PC817 при полном открытии будут давать падение напряжения около 1 В. И , в этом случае, дискретные входы пром.контроллера выполненные на КМОП микросхемах будут срабатывать неустойчиво, в этом случае имеет смысл реализовать схему выхода на полевом N-канальном транзисторе. Вариант схемы с выходом на полевом N-канальном транзисторе приведен на рис.4 . Для управления полевым транзистором пришлось задействовать дополнительный вход контроллера (клемма Х1). В случае если входов контроллера для этого не хватает, можно использовать дополнительный источник питания + 5В, подключив его к клемме Х1. Рабочий вход (клемма Х2) замыкается полевым транзистором и сформированные импульсы поступают на вход контроллера Х2.
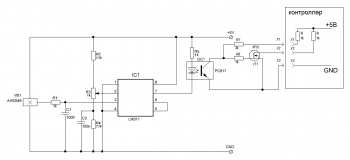
Рис.4 Вариант схемы с выходом на полевом N-канальном транзисторе с дополнительной гальванической развязкой
Если дополнительная гальваническая развязка выхода не нужна, можно использовать схему рис.5
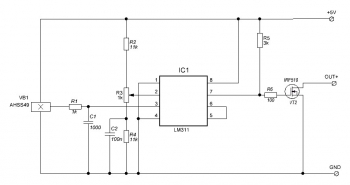
Рис.5 Вариант схемы с выходом на полевом N-канальном транзисторе без дополнительной опторазвязки

Рис. 6 Осциллограмма выходного сигнала для варианта схемы см. рис. 4
Датчики частоты вращения двигателя
Датчики частоты вращения двигателя используются в системах управления двигателем для:
- измерения числа оборотов двигателя
- определения положения коленчатого вала (положение поршня двигателя)
Число оборотов рассчитывается по интервалу между сигналами датчика скорости вращения.
Индуктивные датчики скорости вращения
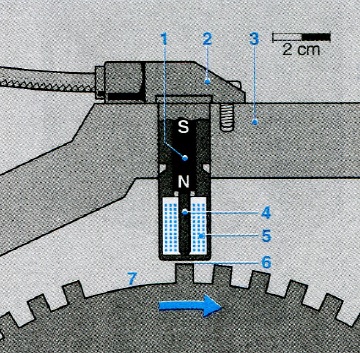
Рис. Индуктивный датчик скорости вращения (конструкция):
- Постоянный магнит
- Корпус датчика
- Корпус двигателя
- Полюсный контактный штифт
- Обмотка
- Воздушный зазор
- Зубчатое колесо с точкой отсчета
Конструкция и принцип действия Датчик монтируется прямо напротив ферромагнитного зубчатого колеса (поз. 7) с определенным воздушным зазором. Он имеет сердечник из магнитомягкой стали (полюсный контактный штифт, поз. 4) с обмоткой (5). Полюсный контактный штифт соединен с постоянным магнитом (1). Магнитное поле распространяется через полюсный контактный штифт, проходя в зубчатое колесо. Магнитный поток, проходящий через катушку, зависит от того, попадает ли расположение датчика напротив впадины или зуба колеса. Зубец соединяет в пучок магнитный поток рассеяния, исходящий от магнита. Через катушку происходит усиление сетевого потока. Впадина, наоборот, ослабляет магнитный поток. Эти изменения магнитного потока при вращении зубчатого колеса индуцируют в катушке синусоидальное выходное напряжение, пропорциональное скорости изменения и числу оборотов двигателя. Амплитуда переменного напряжения интенсивно возрастает с увеличением числа оборотов (несколько мВ… > 100 В). Достаточная амплитуда присутствует, начиная с минимального числа оборотов от 30 в минуту.
Читайте также: Рекомендации по карданным валам
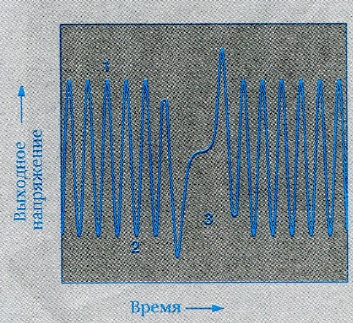
Рис. Сигнал индуктивного датчика скорости вращения двигателя:
Активные датчики скорости вращения
Активные датчики скорости вращения работают по магнитостатическому принципу. Амплитуда выходного сигнала не зависит от числа оборотов. Благодаря этому можно измерять скорость вращения и при очень низком числе оборотов (квазистатическое определение числа оборотов).
Дифференциальный датчик Холла
На проводящей ток пластинке, по которой вертикально проходит магнитная индукция В, поперечно к направлению тока можно снимать напряжение UH (напряжение Холла), пропорциональное направлению тока.

Рис. Принцип работы дифференциального датчика Холла:
- а Расположение датчика
- b Сигнал датчика Холла
- большая амплитуда при маленьком воздушном зазоре
- маленькая амплитуда при большом воздушном зазоре
- с Выходной сигнал
- Магнит
- Датчик Холла 1
- Датчик Холла 2
- Зубчатое колесо
В дифференциальном датчике Холла магнитное поле вырабатывается постоянным магнитом (поз. 1). Между магнитом и импульсным кольцом (4) находятся два сенсорных элемента Холла (2 и 3). Магнитный поток, который проходит сквозь них, зависит от того, находится ли датчик скорости вращения напротив зубца или паза. Благодаря созданию разности сигналов от обоих датчиков достигается снижение магнитных сигналов возмущения и улучшенное соотношение сигнала/ шума. Боковые поверхности сигнала датчика могут обрабатываться без оцифровывания непосредственно в блоке управления.
Вместо ферромагнитного зубчатого колеса используются также многополюсные колеса. Здесь на немагнитном металлическом носителе установлен намагничивающийся пластик, который попеременно намагничивается. Эти северные и южные полюсы принимают на себя функцию зубцов колеса.
AMR-датчики
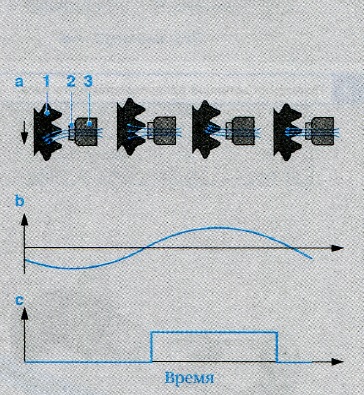
Рис. Принцип определения числа оборотов с помощью датчика AMP:
- а Размещение
- в различные моменты времени
- b Сигнал датчика AMP
- с Выходной сигнал
- Импульсное (активное) колесо
- Сенсорный элемент
- Магнит
Электрическое сопротивление магнито-резистивного материала (AMP, анизотропный магниторезистивный) является анизотропным. Это означает, что оно зависит от направления магнитного поля, которое на него воздействует. Это свойство используется в AMP-датчике. Датчик находится между магнитом и импульсным кольцом. Линии поля изменяют свое направление, когда вращается импульсное (активное) колесо. В результате формируется синусоидальное напряжение, которое усиливается в схеме обработки данных и преобразуется в сигнал прямоугольной формы.
GMR-датчики
Усовершенствование активных датчиков скорости вращения отражено в использовании технологии GMR (ГМР) (Giant Magneto-Resistance). По причине высокой чувствительности по сравнению с датчиками AMP здесь возможны большие воздушные зазоры, за счет чего предполагаются использования в трудных сферах применения. Более высокая чувствительность производит меньше шумов фронта сигнала.
В ГМР-датчиках возможны также все двухпроводные порты, используемые ранее в датчиках скорости вращения Холла.
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала