В статье рассмотрены устройство, принцип действия и примеры использования электрических систем синхронного вращения (электрический вал) в станках и установках.
Допустим, что два вала, не имеющие механической связи друг с другом, должны вращаться с одинаковыми скоростями, не поворачиваясь друг относительно друга. Для обеспечения такого синхронного и синфазного вращения с двигателями Д1 и Д2, которые вращают соответственно валы I и II (рис. 1), связывают вспомогательные асинхронные машины А1 и А2 с фазными роторами. Роторные обмотки этих машин соединяют друг с другом встречно.
Если частоты вращения обеих машин и положения их роторов одинаковые, то электродвижущие силы, наведенные в обмотках роторов машин А1 и А2, равны и направлены навстречу друг другу (рис. 2, а), и ток в цепи роторов не протекает.
Предположим, что направление вращения поля вспомогательных машин совпадает с направлением вращения их роторов. При замедлении вращения машины А2 ее ротор отстанет от ротора А1, вследствие чего э. д. с. Ер2, наведенная в обмотке ротора, сместится по фазе в сторону опережения (рис. 2, б), и в цепи роторов машин А1 и А2 под действием векторной суммы э. д. с. Е появится уравнительный ток I .
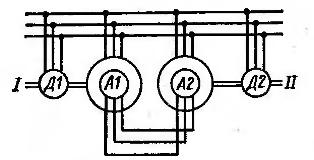
Рис. 1. Схема синхронной связи
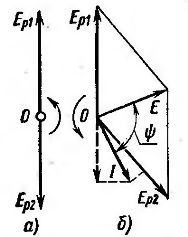
Рис. 2. Векторные диаграммы системы синхронной связи
Вектор тока I будет отставать от вектора э. д. с. Е на угол φ . Проекция вектора тока I на вектор э. д. с. Ер2 совпадает с этим вектором по направлению. Проекция вектора тока на вектор э. д. с. Ер1 направлена навстречу ему. Из этого следует, что машина А2 будет работать в режиме двигателя, а машина А1 — в режиме генератора. При этом вал машины А2 получит ускорение, а вал машины A1 — замедление. Таким образом, машины разовьют моменты, восстанавливающие синхронное вращение валов I и II и прежнее согласованное положение в пространстве роторов машин А1 и А2. Роторы этих машин могут вращаться как по направлению вращения поля, так и в противоположном направлении.
Данная система носит название электрической системы синхронного вращения . Ее называют также электрическим валом . Система синхронного вращения может заменить, например, ходовые винты у токарно-винторезных станков.
Так как цепи подачи металлорежущих станков по сравнению с цепями главного движения потребляют обычно малую мощность, то для синхронизации главного движения с подачей может быть применена более простая схема синхронного вращения (рис. 3 ). В этом случае неизбежно постоянное рассогласование между положениями роторов машин А1 и А2, без чего в цепи ротора машины А2 не было бы тока и она не смогла бы преодолеть момент сил сопротивления цепи подачи. Так как машина А2 получает питание от статора и ротора, то при данной системе электрического вала требуется шестипроводная подводка к двигателю, установленному во многих случаях на движущемся узле станка, условно показанном на рисунке штриховой линией.
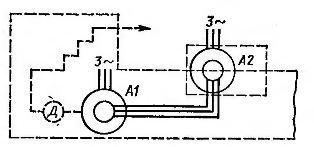
Рис. 3. Системы синхронной связи тяжелого токарно-винторезного станка
В пределах углового рассогласования, не превышающего 90°, электрический синхронизирующий момент возрастает. Для обеспечения значительного синхронизирующего момента машины синхронной связи при всех возможных угловых частотах вращения должны работать с большими скольжениями (не менее 0,3 — 0,5). Поэтому во избежание недопустимого нагрева эти машины должны быть достаточно больших размеров.
Читайте также: 5255270 звездочка распределительного вала
Мощность машин дополнительно увеличивают, стремясь исключить влияние колебаний нагрузки и сил трения. Применяют также механические передачи, понижающие частоту вращения валов станка, а следовательно, и величину угловой ошибки, приведенной к валу станка. Перед началом работы электрического вала асинхронные машины А1 и А2 включают на однофазное питание. При этом ротор машины А2 занимает исходное положение, согласованное с положением ротора машины А1.
Системы синхронного вращения рационально применять для тяжелых станков, так как изготовление длинных ходовых винтов связано со значительными трудностями. Кроме того, с увеличением длины винтов или валов, вследствие их скручивания, точность согласования взаимного расположения частей станка уменьшается. В системе электрического вала расстояние между валами никакого влияния на точность работы оказать не может.
При использовании электрического вала исключаются, механические связи суппортов со шпинделем и сильно упрощается кинематическая схема. Существенным недостатком систем электрического вала в тяжелых станках является возможность порчи дорогостоящей заготовки при перерыве в электроснабжении, так как при этом сразу возникает рассогласование. В некоторых случаях при такой аварии порча заготовки может быть предотвращена путем быстрого автоматического отвода инструмента.
Для станкостроения интерес представляет схема с двумя одинаковыми асинхронными двигателями с фазными роторами (рис. 4). Так как цепь обоих роторов замкнута на реостат R, то при подключении двигателей к сети переменного тока оба ротора начинают вращаться.
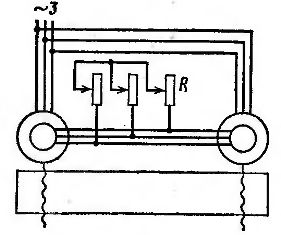
Рис. 4. Схема синхронной связи с роторным реостатом
Помимо токов, протекающих в обмотках роторов и реостате, в цепи роторов обеих машин течет уравнительный ток. Наличие этого тока обусловливает появление синхронизирующего момента, вследствие чего машины вращаются синхронно. Такая система может быть использована для подъема и опускания поперечин крупных строгальных, продольно-фрезерных и карусельных станков.
Благодаря системе электрического вала решается проблема согласованного движения конвейеров, входящих в единый производственный комплекс. Наибольшее практическое применение в этом случае получил вариант синхронного вращения двигателей с общим преобразователем частоты.
Кроме рассмотренных систем электрического вала для станкостроения разрабатывались и применялись и другие системы с машинами переменного тока, в том числе однофазные системы и системы с синхронными двигателями специальной конструкции.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
- Электродвигатели
- Конструкция электродвигателя
- Принцип работы электродвигателя
- Классификация электродвигателей
- Типы электродвигателей
- Коллекторные электродвигатели
- Универсальный электродвигатель
- Коллекторный электродвигатель постоянного тока
- Бесколлекторные электродвигатели
- Асинхронный электродвигатель
- Cинхронный электродвигатель
- Специальные электродвигатели
- Серводвигатель
- Основные параметры электродвигателя
- Момент электродвигателя
- Мощность электродвигателя
- Механическая мощность
- Коэффициент полезного действия электродвигателя
- Частота вращения
- Момент инерции ротора
- Номинальное напряжение
- Электрическая постоянная времени
- Механическая характеристика
- Сравнение характеристик внешне коммутируемых электрических двигателей
- Области применения электродвигателей
- 🎦 Видео
Видео:КАК РАБОТАЕТ МОТОР ЭЛЕКТРОСАМОКАТА/ЭЛЕКТРОВЕЛОСИПЕДА?Скачать

Электродвигатели
В некоторых режимах работы электропривода электродвигатель осуществляет обратное преобразование энергии, то есть работает в режиме электрического генератора.
По виду создаваемого механического движения электродвигатели бывают вращающиеся, линейные и др. Под электродвигателем чаще всего подразумевается вращающий электродвигатель, так как он получил наибольшее применение.
Областью науки и техники изучающей электрические машины является — электромеханика. Принято считать, что ее история начинается с 1821 года, когда был создан первый электродвигатель М.Фарадея.
Видео:ТЕХНИКА БЕЗОПАСНОСТИ. Вид Грубейшего Нарушения ТРЕБОВАНИЙ ТБ при работе на СТАНКАХ.Скачать
Конструкция электродвигателя
Основными компонентами вращающегося электродвигателя являются статор и ротор. Статор — неподвижная часть, ротор — вращающаяся часть.

У большей части электродвигателей ротор располагается внутри статора. Электродвигатели у которых ротор находится снаружи статора называются электродвигателями обращенного типа.
Видео:Вот, что можно сделать из моторчика дворников и редуктора болгарки! Гениальная самоделка!Скачать

Принцип работы электродвигателя




Видео:Реактивная мощность за 5 минут простыми словами. Четкий #энерголикбезСкачать

Классификация электродвигателей
- Универсальный
- Репульсионный
- КДПТ с обмоткой возбуждения
- Включение обмотки
- Независимое
- Последовательное возбуждения
- Параллельное
- Комбинированное
- БДПТ
(Бесколлекторный двигатель + ЭП |+ ДПР) - ВРД
(Реактивный двигатель с ротором с явновыраженными полюсами и сосредоточенной обмоткой статора + ЭП |+ ДПР)
- Трехфазный
(многофазный)- АДКР
- АДФР
- с пусковой обмоткой
- с экранированными полюсами
- с асимметричным магнитопроводом
- СДОВ
(с контактными кольцами и щетками) —> - СДПМ 5 —>
- СДПМВ
- СДПМП
- Гибридный
Читайте также: Тефлоновый валы для бразер
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, — датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря [5].
- Вентильный электродвигатель постоянного тока — электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля [1].
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
- КДПТ — коллекторный двигатель постоянного тока
- БДПТ — бесколлекторный двигатель постоянного тока
- ЭП — электрический преобразователь
- ДПР — датчик положения ротора
- ВРД — вентильный реактивный двигатель
- АДКР — асинхронный двигатель с короткозамкнутым ротором
- АДФР — асинхронный двигатель с фазным ротором
- СДОВ — синхронный двигатель с обмоткой возбуждения
Видео:Работа энкодераСкачать

Типы электродвигателей
Коллекторные электродвигатели
Коллекторная машина — вращающаяся электрическая машина, у которой хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором [1]. В коллекторном двигателе щеточно-коллекторный узел выполняет функцию датчика положения ротора и переключателя тока в обмотках.

Универсальный электродвигатель
Коллекторный электродвигатель постоянного тока
Бесколлекторные электродвигатели
У бесколлекторных электродвигателей могут быть контактные кольца с щетками, таким образом не надо путать бесколлекторные и бесщеточные электродвигатели.
Бесщеточная машина — вращающаяся электрическая машина, в которой все электрические связи обмоток, участвующих в основном процессе преобразования энергии, осуществляются без скользящих электрических контактов [1].
Асинхронный электродвигатель
Cинхронный электродвигатель
Видео:Изготовление валов для любого оборудования и станков. Обработка валов на токарных станках.Скачать
Специальные электродвигатели
Серводвигатель
Видео:Введение в автоматизированный электропривод, 1976Скачать
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин -1 [4]
Начальный пусковой момент — момент электродвигателя при пуске.
1 oz = 1/16 lb = 0,2780139 N (Н)
1 lb = 4,448222 N (Н)момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)
1 lb∙in = 0,112985 Nm (Нм)Читайте также: Муфта выходного вала это
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы [2].
,
Для вращательного движения
,
- где – угол, рад,
,
- где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (механическая), Вт
- При этом потери в электродвигатели обусловлены:
- электрическими потерями — в виде тепла в результате нагрева проводников с током;
- магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
- механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
- дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
Частота вращения
- где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м 2 ,
- m — масса, кг
1 oz∙in∙s 2 = 0,007062 kg∙m 2 (кг∙м 2 )
Момент инерции связан с моментом силы следующим соотношением
,
- где – угловое ускорение, с -2 [2]
,
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики [3].
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
- где – постоянная времени, с
Механическая характеристика
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Видео:ЭЛЕКТРОПРИВОД. Учебный фильм.Скачать
Сравнение характеристик внешне коммутируемых электрических двигателей
Ниже представлены сравнительные характеристики внешне коммутируемых электродвигателей, в ракурсе применения в качестве тяговых электродвигателей в транспортных средствах.
В соответствии с выше приведенными показателями гибридный синхронный электродвигатель, а именно синхронный реактивный электродвигатель со встроенными постоянными магнитами, является наиболее подходящим для применения в качестве тягового электродвигателя в автомобилестроении (выбор проводился для концепта автомобилей BMW i3 & BMW i8). Использование реактивного момента обеспечивает высокую мощность в верхнем диапазоне скоростей. Более того такой двигатель обеспечивает очень высокую эффективность (КПД) в широком рабочем диапазоне [7].
Видео:Электромеханический трехвалковый трубогиб (профилегиб) станок ПРОФИ-РВ2. Почему его покупают?Скачать
Области применения электродвигателей
Электродвигатели являются крупнейшими потребителями электроэнергии в мире, на них приходится около 45% от всей потребляемой электроэнергии [6].
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала
🎦 Видео
Самодельный редукторный электропривод малой продольной 1A62(начало модернизации)Скачать
Принципы работы кареточного электромотора для велосипеда на примере Bafang. // Clever CricketСкачать
Жесть! Страшное происшествие на стройке!Скачать
МЕРТВАЯ болгарка поднимает 1200 кг. МОЩНАЯ самоделка ИЗ ХЛАМА.Скачать
Как сделать любую шестерёнку для бытовой техники самому, в домашних условияхСкачать
СУПЕР СТАНОК! ОТЛИЧНАЯ ИДЕЯ ИЗ ДВИГАТЕЛЯ ОТ СТИРАЛКИ. Homemade wood lathe.Скачать
Стенд для правки дисков (SIVIK) Титан Alu Компакт с электроприводом [официальное видео]Скачать
Трапецеидальные винты. Чем отличаются и как выбрать?Скачать
6.2 Кинематический расчет приводаСкачать






































![Стенд для правки дисков (SIVIK) Титан Alu Компакт с электроприводом [официальное видео]](https://i.ytimg.com/vi/mjI2mPMXfEc/0.jpg)