
На лифтах в настоящее время применяют редукторы с цилиндрическим и глобальным червячным зацеплением. Наиболее распространены редукторы с одноходовым червяком (см. рис. 26). Обод червячного колеса, изготовленный из бронзы, не должен иметь трещин и раковин. Червяк выполнен из стали высокой твердости. Червяк и червячное колесо находятся в масляной ванне. Масло служит для уменьшения трения и отвода теплоты при работе передачи. Осевой люфт червяка регулируется планшайбой, расположенной на упорном подшипнике. Червичный редуктор состоит из червяка и червячного колеса, сидящего на выходном валу, который установлен в подшипниках в чугунном корпусе редуктора. Электродвигатель соединен с червяком с помощью муфты, выполняющей также роль тормозного шкива. На выходной вал редуктора насажен канатоведущий шив.
Изготовление глобоидного червяка сопряжено с применением специального оборудования и режущего инструмента, поэтому качество его изготовления и степень точности весьма невысоки, что приводит к низкому КПД передачи и значительным вибрациям в кабине лифта. Червячные колеса глобоидного и цилиндрического редукторов по форме одинаковы. Глобоидный червячный редуктор показан на рис. 27. Венец червячного колеса крепится к ступице болтами. Тихоходный вал установлен в корпусе редуктора на конических роликовых подшипниках. Наружное кольцо подшипника со стороны канатоведущего шкива упирается в крышку. Правильное положение средней плоскости червячного колеса относительно оси червячного вала достигается установкой прокладок между наружным кольцом подшипника и врезной крышкой. Табличка, укрепленная на редукторе заводом-изготовителем, должна иметь дату изготовления, тип редуктора, номинальный момент и передаточное число редуктора.
Моторы и двигатели лифта
- Заказать и купить двигатель лифта, цена которого будет максимально доступной, позволяет прямое сотрудничество компании с производителями комплектующих. Оперативная доставка заказов производится по всей территории Таможенного союза.
Вам это может быть интересно:
Вы выбрали: Моторы и двигатели лифта
Особенности работы
Двигатель лифта пассажирского и грузового обязан соответствовать жестким требованиям. Помимо прочности, мотор лифта обладает следующими эксплуатационными характеристиками:
- регулировкой оборотов;
- малошумностью;
- повышенной конструктивной защитой;
- устойчивостью к температурным перепадам;
- высокой степенью безопасности.
Наиболее технологичными являются двигатели для лифтов асинхронного типа. У электродвигателей отсутствует инерционность, что обеспечивает лучшую управляемость, комфорт использования. Обязательно присутствуют датчики перегрева.
Применение высокоточных подшипников, минимизирующих вибрацию, помогает обеспечить низкий уровень шума. Две независимые статорные обмотки дают возможность эффективно управлять скоростью вращения вала.
Моторы для лифта располагают системой электромагнитного торможения при возникновении внештатных ситуаций. Поскольку эксплуатация оборудования предполагает частые пуски и многократное кратковременное функционирование, детали электромоторов отличаются надежностью.
ЛИФТОВЫЙ ЭЛЕКТРОПРИВОД С ОДНО- И ДВУХСКОРОСТНЫМИ АСИНХРОННЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ БЕЗ ДОПОЛНИТЕЛЬНЫХ СРЕДСТВ РЕГУЛИРОВАНИЯ
Электроприводы переменного тока включают в себя специальные одно- или двухскоростные асинхронные электродвигатели с короткозамкнутым ротором.
Система электропривода с односкоростным электродвигателем наиболее проста. Применяется электродвигатель повышенного скольжения, имеющий при больших значениях пускового момента относительно низкое значение пускового тока. Запуск электродвигателя осуществляется прямым подключением обмотки статора к питающей сети. Остановка лифта производится отключением электродвигателя от сети с одновременным замыканием колодок механического тормоза на быстроходный вал редуктора лебедки. Недостаток этой системы— замыкание механического тормоза на полной рабочей скорости, что ускоряет изнашивание тормозных прокладок. Кроме того, не обеспечивается высокая точность остановки кабины на этаже, так как при постоянном тормозном моменте механического тормоза путь торможения зависит от степени загрузки кабины.
Электропривод с асинхронным односкоростным электродвигателем с короткозамкнутым ротором применяют на малых грузовых, грузовых тротуарных и пассажирских лифтах грузоподъемностью до 320 кг со скоростью до 0,5 м/с.
Система электропривода с двухскоростным асинхронным электродвигателем с короткозамкнутым ротором получила сейчас наибольшее распространение на массовых пассажирских лифтах со скоростью от 0,71 до 1,4 м/с. Применяют специальные полюсопереключаемые асинхронные электродвигатели с короткозамкнутым ротором, с двумя независимыми обмотками на статоре. Соотношения синхронных скоростей в основном 1:3, 1 :4 и 1:6.
Двигатели выполняют с механическими характеристиками специальной формы для двигательного режима обмоток большой и малой скорости и для генераторного режима об-мотки малой скорости. Более подробно об этих электродвигателях будет рассказано в следующем разделе.
При применении двухскоростного электропривода пуск лифта также производится прямым подключением обмотки большой скорости непосредственно к сети. При подходе к этажу замедление осуществляется переключением обмоток электродвигателя с большой скорости на малую. При этом электродвигатель переходит в режим генераторного торможения, скорость лифта снижается в 3 или 4 раза, и лифт на пониженной (малой) скорости подходит к точной остановке. Окончательная остановка кабины лифта на этаже происходит при отключении от сети обмотки малой скорости и замыкании механического тормоза. Замыкание механического тормоза только после достижения лифтом малой скорости позволяет в 9—16 раз снизить кинетическую энергию, погашаемую в тормозе, что в свою очередь приводит к уменьшению размеров тормозного устройства и увеличению сроков его службы.
Обмотка малой скорости обеспечивает также перемещение лифта на сниженной скорости в режиме ревизии при ремонтных операциях.
Читайте также: Электродвигатель 12 вольт 1000 ватт с редуктором
Для повышения точности остановки электромеханический тормоз отключают таким образом, что его замыкание происходит одновременно с отключением двигателя. Тем самым исключается возможность выбега. Обеспечение заданных ускорений и рывков осуществляется подбором дополнительных маховых масс на валу электродвигателя. Кроме этого для снижения рывков в момент перехода с большой скорости на малую в некоторых случаях применяют специальную схему включения обмотки малой скорости. При этом одна из фаз обмотки малой скорости включается последовательно с двумя фазами обмотки большой скорости. Это приводит к снижению генераторного момента двигателя, особенно при скорости, близкой к синхронной, для обмотки большой скорости, что необходимо для снижения рывков, возникающих в момент переключения обмоток двигателя.
У систем электропривода переменного тока с двухскоростными электродвигателями процессы разгона, ^становившегося режима и замедления значительно зависят от нагрузки. Эта зависимость увеличивается с повышением скорости движения лифтов. Пути дотягивания лифта к этажу увеличиваются, в результате чего снижается средняя скорость движения и понижается комфортность. Кроме того, наблюдаются достаточно высокие и толчкообразные изменения ускорения, которые вызываются резкими изменениями моментов электродвигателя при включениях и переключениях, а также при механическом торможении.
На лифтах старых конструкций, особенно при ограниченной мощности питающей сети, нашла применение система электропривода с асинхронным электродвигателем с фазовым ротором. В такой системе запуск электродвигателя осуществляется через пусковые сопротивления, включаемые в цепь ротора. Выход электродвигателя на полную скорость обеспечивается последовательным шунтированием ступеней сопротивлений в роторе. Остановка кабины лифта производится так же, как и в системе электропривода с односкоростным асинхронным электродвигателем, отключением электродвигателя от сети и замыканием механического тормоза. При этом в цепь ротора вводят пусковые сопротивления.
Такая система не может рассматриваться как типовая для новых конструкций лифтов массового применения, однако она удобна в ряде случаев в старых складских и торговых помещениях или для временных строительных лифтов.
Для отдельных категорий лифтов применяют и другие модификации электропривода на переменном токе. Так, например, для грузовых лифтов с монорельсом применяют систему электропривода с двухскоростным асинхронным электродвигателем с короткозамкнутым ротором и с так называемым микроприводом, который обеспечивает повышенную точность остановки, необходимую для лифтов этого класса.
Микропривод сочленен с основным приводом посредством электромагнитной муфты и состоит из редуктора и односкоростного двигателя небольшой мощности. Управление лифтом в режиме выравнивания кабины при стыковке монорельса производится из кабины вручную с помощью кнопок доводки. Скорость движения кабины при доводке лифта составляет 10—13 мм/с. На грузовых лифтах с микроприводом необходимо дополнительное оборудование, состоящее из электромагнитной муфты, асинхронного двигателя и редуктора.
В настоящее время в СССР, разработан электропривод грузовых лифтов с монорельсом с применением импульсной доводки при работе двигателя, на обмотке малой скорости. В этом электроприводе исключается перечисленное выше дополнительное оборудование.
АСИНХРОННЫЕ ЭЛЕКТРОДВИГАТЕЛИ ЛИФТОВ
Лифтовой электродвигатель предназначается для создания необходимого вращающего или тормозного момента на червячном валу редуктора
На лифтах со скоростью движения кабины до 1 м/с устанавливаются асинхронные электродвигатели как наиболее простые по устройству, надежные в работе и не требующие особого ухода при эксплуатации На рис 96, о показан асинхронный электродвигатель в разобранном виде
Статор 3 электродвигателя состоит из чугунного корпуса, внутри которого размещен цилиндрической формы магнитопровод, набранный из листов электротехнической стали Для уменьшения потерь и нагрева эти листы изолируются друг от друга лаковыми
или другими изолирующими прослойками По всей длине магнитопровода под определенным углом к образующей цилиндрической поверхности его устраиваются пазы, в которые укладываются секции статорной обмотки, состоящие из медных изолированных проводов.
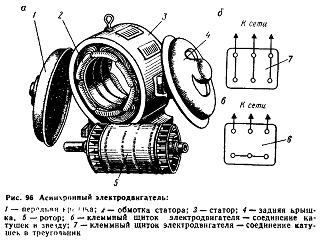
Рис. 96 Асинхронный электродвигатель
В зависимости от требуемой частоты вращения ротора эта обмотка должна образовывать определенное число пар полюсов Выводы от катушек статорной обмотки выводятся на клеммный щиток (рис 96, б, в), к которому присоединяются провода электрической сети
Ротор 5 асинхронного электродвигателя имеет цилиндрическую форму и состоит из магнитопровода, жестко укрепленного на валу электродвигателя и обмотки Цилиндрический магнитопровод ротора, так же как и магнитопровод статора, набран из изолированных друг от друга листов электротехнической стали. Вдоль всего магнитопровода по всей его поверхности устроены пазы, в которые укладывается роторная обмотка Ротор вращается в опорных подшипниках качения или скольжения, установленных в гнездах передней 1 и задней 4 крышек
По конструкции асинхронные электродвигатели различают с короткозамкнутым и фазовым ротором В электродвигателях первого типа роторная обмотка выполнена в виде беличьего колеса Образующие ее прутья из цветного металла уложены в пазы магнитопровода ротора и с обеих торцовых сторон закорочены В электродвигателях второго типа в пазы магнитопровода ротора уложены секции такой же, как у статора, обмотки. Три вывода от этой обмотки присоединяются к бронзовым кольцам, укрепленным на валу ротора и изолированным от него и друг от друга Посредством этих колец и меднографитных щеток осуществляется ввод в роторную цепь добавочного сопротивления для того, чтобы сделать пуск электродвигателя плавным Если статорную обмотку асинхронного электродвигателя присоединить к 1рехфазной электрической сети, то в каждой из составляющих ее катушек возникнут токи, смещенные относительно друг друга на угол 120°. Секции обмотки расположены по окружности статора по определенному закону, поэтому токи этих катушек создадут в зазоре между ротором и статором вращающееся и пульсирующее с частотой питающего тока электромагнитное поле Это поле индуктирует в цепи роторной обмотки э д с, а так как эта обмотка замкнута, то под действием э д с в ней возникает электрический ток, который создаст в зазоре между ротором и статором электромагнитное поле ротора Взаимодействие существующих в зазоре между ротором и статором двух электромагнитных полей приводит к возникновению вращательного усилия, под действием которого неподвижный ротор начинает вращаться.
Читайте также: Резинка редуктора стартера 2110
Частота вращения электромагнитного поля, созданного током статорной обмотки, зависит от частоты изменения питающего тока (F) и от числа пар полюсов обмотки (Р) и выражается зависимостью
Из указанной формулы видно, что изменение частоты вращения электромагнитного поля, а следовательно, и частоты вращения ротора электродвигателя, может быть произведено или изменением частоты питающего тока или изменением числа пар полюсов Чем больше частота питающего тока, тем выше частота вращения электромагнитного поля, и наоборот чем меньше число пар полюсов, тем выше частота вращения электромагнитного поля, и наоборот
Так как частота питающего промышленного тока неизменна (50 Гц), то изменить частоту вращения электромагнитного поля можно изменением числа пар полюсов статорной обмотки Асинхронные электродвигатели делятся на двухскоростные и много скоростные
На рис 97, а изображена механическая характеристика двухскоростного асинхронного электродвигателя Она характеризует частоту вращения ротора в зависимости от величины и характера приложенной к нему нагрузки Нагрузка бывает реактивная (тормозная) и активная (двигательная) На механической характеристике по оси ординат (вверх) откладываются частота вращения ротора, по оси абсцисс (вправо и влево от оси ординат) откладываются моменты справа — реактивные, слева — активные Рассмотрим механическую характеристику 1, не принимая во внимание вторую т е будем рассматривать наш асинхронный электродвигатель как односкоростной
Точка з на оси абсцисс соответствует ветчине пускового момента Мнр Пусковой момент— это момент, развиваемый электродвигателем при неподвижном роторе и поданном на статорную обмотку напряжении
Точка и на оси абсцисс соответствует номинальному моменту Мнр, который электродвигатель развивает при номинальной нагрузке Величина этого момента должна быть всегда меньше пускового момента
Точка ж на механической характеристике соответствует критическому моменту Мнр Момент критический — это максимальный момент, который может развить электродвигатель в переходном процессе
Точка е на механической характеристике соответствует номинальной частоте вращения ротора электродвигателя при номинальной нагрузке Мнр
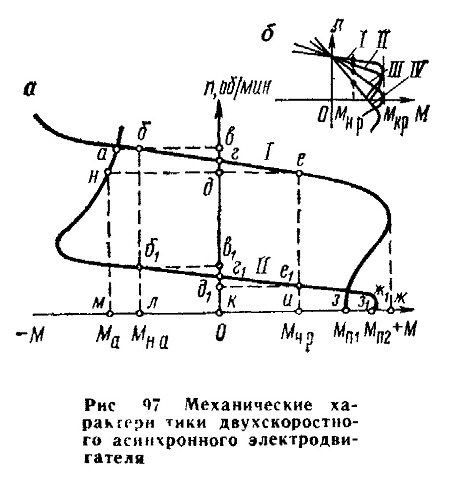
Точка г на оси ординат соответствует частоте вращения ротора электродвигателя на холостом ходу, которая зависит от частоты вращения электромагнитного поля и равна ей.
Точка б на механической характеристике соответствует частоте вращения ротора электродвигателя при наличии на его валу двигательного момента Мнр. Как видно из рис. 97, о, частота вращения ротора электродвигателя в этом режиме несколько больше; электродвигатель работает в режиме генераторного торможения
Проследим разгон ротора электродвигателя при наличии на его валу номинальной реактивной нагрузки (полностью загруженная кабина лифта приготовлена для движения вверх или порожняя— для движения вниз). После подачи напряжения на статорную обмотку ротор под действием пускового момента Мп1 (см. рис. 97, а) приходит во вращение. На механической характеристике видно, что с увеличением частоты вращения ротора увеличивается вращающий момент электродвигателя и достигает критического М„р (на механической характеристике он равен кж). При дальнейшем увеличении частоты вращения ротора момент, развиваемый электродвигателем, уменьшается. Разгон ротора прекратится, когда момент, развиваемый электродвигателем, сравняется с реактивным моментом, приложенным к его валу, т. е. электродвигатель будет работать с номинальным моментом Мн и развивать частоту кд. Частота вращения ротора будет в этом случае несколько ниже частоты вращения электромагнитного поля (на механической характеристике точка е). Теперь частота вращения электромагнитного поля относительно вращающегося ротора будет всего гд, что составляет примерно 4—10% от синхронной частоты. При такой частоте вращения электромагнитного поля статора относительно вращающегося ротора в роторную цепь индуктируется э. д. с., достаточная для создания номинального электрического тока и вращающего момента.
Если же к валу ротора приложить двигательную нагрузку Мп а, то при разгоне ротор достигнет синхронной частоты, когда частота вращения электромагнитного поля будет равна частоте вращения ротора и в роторной цепи ток будет равен нулю, так как вращающееся электромагнитное поле будет относительно вращающегося ротора неподвижным. При дальнейшем разгоне ротора его частота вращения будет выше частоты вращения электромагнитного поля и уже ротор будет пересекать магнитные силовые линии вращающегося электромагнитного поля, а это приведет к изменению направления электрического тока в роторной цепи и к возникновению тормозного момента Мя а, электродвигатель перейдет в режим генераторного торможения с отдачей электроэнергии в электрическую сеть.
Читайте также: Сделай сам своими руками редуктор
На механической характеристике асинхронного электродвигателя видно, что частота вращения ротора может быть ниже, равна или выше синхронной. Поэтому рассматриваемый электродвигатель называется асинхронным (несинхронным). Разность между синхронной частотой и частотой вращения ротора называется проскальзыванием частоты ротора относительно частоты вращения электромагнитного поля.
Лифтовые электродвигатели могут работать как в двигательном, так и в тормозном режимах. Электродвигатель работает в двигательном режиме, если масса движущейся вверх кабины больше массы противовеса или движущаяся вниз кабина легче противовеса Электродвигатель работает на холостом ходу, если масса кабины с грузом равна массе противовеса.
На механической характеристике (см. рис, 97, а) видно, что ее прямолинейная часть от точки г до точки е располагается под некоторым углом к оси ординат. Это значит, что на этом участке частота вращения ротора при уменьшении или увеличении нагрузки на его валу находится в обратно пропорциональной зависимости
Чем больше нагрузка, тем меньше частота, и наоборот. На прямолинейном участке гб механической характеристики с увеличением активной нагрузки частота вращения ротора электродвигателя увеличивается, а с уменьшением ее частота вращения ротора уменьшается до синхронной.
Величина угла наклона прямолинейной механической характеристики к оси ординат зависит от сопротивления роторной обмотки Чем больше это сопротивление, тем больше угол, т, е. прямолинейная часть механической характеристики становится положе, и наоборот. На рис. 97,6 изображены четыре механические характеристики при разных величинах сопротивлений в роторной цепи Изменение сопротивления роторной цепи влияет на наклон прямолинейного участка механической характеристики, но не влияет на величину критического момента Мкр. При этом с увеличением сопротивления роторной цепи (до определенного значения) увеличивается пусковой момент. Механическая характеристика III имеет наибольший пусковой момент, что очень важно при разгоне ротора электродвигателя. Механическая характеристика I называется естественной (это та характеристика, на которой работает синхронный электродвигатель в нормальном режиме). Характеристики II, III, IV — искусственные.
На рис 97, а показаны механические характеристики двухскоростного электродвигателя. Характеристика I, на которой электродвигатель работает на большой частоте и характеристика //, на которой электродвигатель работает на малой частоте, имеют те же характерные точки, что и рассмотренная выше механическая характеристика односкоростного электродвигателя. Разгон ротора после присоединения статорной обмотки большой частоты к электрической сети производится от п=0 до п = пв (точка е), если приложенная к валу ротора нагрузка имеет реактивный характер (тормозной), т. е. электродвигатель работает в двигательном режиме, и до n = n-i (точка б), если приложенная к валу ротора нагрузка активная.
Предположим, что к валу двухскоростного электродвигателя приложен момент Мп р (см рис. 97, а). В этом случае ротор достигнет частоты, равной кд, соответствующей на механической характеристике 1 точке е. С такой частотой электродвигатель будет работать до снятия напряжения со статорной обмотки. В момент переключения напряжения со статорной обмотки большой частоты на статорную обмотку малой частота вращения ротора по причине инертности вращающихся и движущихся частей лифта не может измениться (уменьшиться) скачком. Скачком изменяется момент, развиваемый электродвигателем, и изменится он от Мп р до Ма (точка н на механической характеристике II). Частота вращения электромагнитного поля в момент переключения уменьшилась скачком. Если до переключения частота вращения электромагнитного поля была выше частоты вращения ротора и оно обеспечивало наличие вращательного момента, то теперь частота вращения электромагнитного поля оказалась в несколько раз меньше частоты вращения ротора и ток, протекающий в роторной цепи, мгновенно изменил свое направление на обратное, создавая тормозной момент. Под действием тормозного момента, развиваемого электродвигателем, частота вращения ротора интенсивно уменьшается, достигает синхронной (точка г\ на механической характеристике II), электродвигатель переходит в двигательный режим, частота уменьшается далее до тех пор, пока усилие, приложенное к валу электродвигателя, не сравняется с усилием, развиваемым электродвигателем. В установившемся режиме ротор вращается с частотой кд и развивает двигательный момент, равный Мв р.
Предположим далее, что к валу двухскоростного электродвигателя приложен Мея. В этом случае после подачи напряжения на статорную обмотку большой частоты ротор достигнет частоты выше синхронной и электродвигатель будет работать на механической характеристике в точке б при частоте вращения ротора, равной кв, и развивать тормозной момент, равный Мна.
В момент переключения напряжения со статорной обмотки большой частоты на статорную обмотку малой скачком изменяется тормозной момент от Мва до Ма. Под действием тормозного момента, развиваемого электродвигателем, частота вращения ротора интенсивно снижается и в конце переходного процесса ротор станет вращаться с частотой кв1 и развивать тормозной момент, равный кл.
Соотношения величин по1 и по2 зависят от соотношения числа пар полюсов статорной обмотки.
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала