

В данной статье я расскажу о магнитном редукторе, разработанном нами. Данный редуктор планируется использовать в связке с бесколлекторным мотором. В статье будет рассказано о возможной области применения данного редуктора, о его плюсах и минусах по сравнению с обычными редукторами.
- Введение
- Магнитный редуктор
- Как сделать понижающий редуктор своими руками
- Тип редуктора
- Выбор по типу редуктора для привода
- Передаточное число [I]
- Примеры выбора мотор-редуктора
- Пример №1
- Пример №2
- Крутящий момент редуктора
- Магнитный редуктор для бесколлекторного мотора
- Введение
- Магнитный редуктор
- Выводы
- Эксплуатационный коэффициент (сервис-фактор)
- Мощность привода
- Устройство и принцип работы мотор редуктора
- Коэффициент полезного действия (КПД)
Введение
Бесколлекторные электродвигатели (BLDC) обладают крайне высокой мощностью при минимальном размере. Это достигается благодаря мощным редкоземельным магнитам. При создании мотора в маленьком форм-факторе, такие двигатели не имеют конкуренции.
Однако, несмотря на высокую мощность, небольшой размер мотора накладывает на него множество ограничений таких как: небольшой момент, высокие рабочие обороты, маленькая площадь охлаждения. Данные ограничения не позволяют использовать весь потенциал мотора. Так, например, мотор форм-фактора 540 (D=36мм L=54мм) способен выдавать мощность свыше киловатта с достаточно хорошим КПД, но это возможно только при очень высоких оборотах, когда эту мощность снять с мотора становится достаточно сложно. В номинальном режиме такой мотор без принудительного обдува может выдавать 200-400ватт.
Основным направлением нашего коллектива MotoChrome является проектирование и создание бесколлекторных моторов. При проектировании мотора для одного из заказчиков мы как раз столкнулись с проблемами описанными выше. Заказчику был нужен мотор небольшим диаметром, но при этом достаточно высоким моментом и КПД. Чтобы соблюсти требования мотор получился длиной почти полметра при диаметре в 40мм. Мотор получился достаточно дорогим и очень сложным в сборке. При этом, для достижения тех же мощностных параметров, можно сделать мотор в 3 раза меньше, но с использованием редуктора. И в итоге выбран был именно этот вариант.
Использование редуктора кажется хорошим решением. Но с ним возникает множество других проблем, что не позволяет применять их полноценно во всех моторах.
- дополнительный узел, имеющий вероятность поломки, и ограниченный ресурс работы
- увеличение габаритных размеров;
- повышенная шумность, что может быть критичным в работе подводных устройств;
- большинство механических редукторов имеют ограничения по передаваемому крутящему моменту и скорости вала на входном валу редуктора, что в свою очередь накладывает дополнительные ограничения/требования к электромотору.
Подбирая редуктор мы упёрлись в две основные проблемы. 1) Чтобы редуктор смог реализовать весь потенциал бесколлекторного мотора, он должен быть размером сравнимым с размером мотора. С ним мотор перестаёт быть компактным. 2) Большинство механических редукторов не способны работать на высоких оборота (>15000 RPM), а нам интересны именно высокие обороты. Только 1…2 компании согласились взять заказ на требуемый редуктор и поставить его через 3 месяца после получения оплаты. Какова будет его надежность и стойкость нам еще предстоит выяснить, однако трудности, связанные с поиском нужного редуктора, заставили нас думать над этой проблемой дальше.
Неплохим вариантом, с нашей точки зрения, оказался магнитный редуктор. Они пока не получили широкого применения и про них достаточно мало информации, поэтому мы решили поглубже разобраться в данном вопросе и сделать редуктор самостоятельно. Это нам позволит отработать подход к его моделированию и позволит в будущем рассчитывать его параметры.
Магнитный редуктор
Магнитный редуктор мы решили делать по распространённой схеме, которая представляет собой аналог планетарного редуктора. Магниты в центре являются «солнечной шестерней», магниты снаружи — «зубчатый венец (эпицикл)», между ними зубцы из магнитомягкого материала выполняют роль «водила».
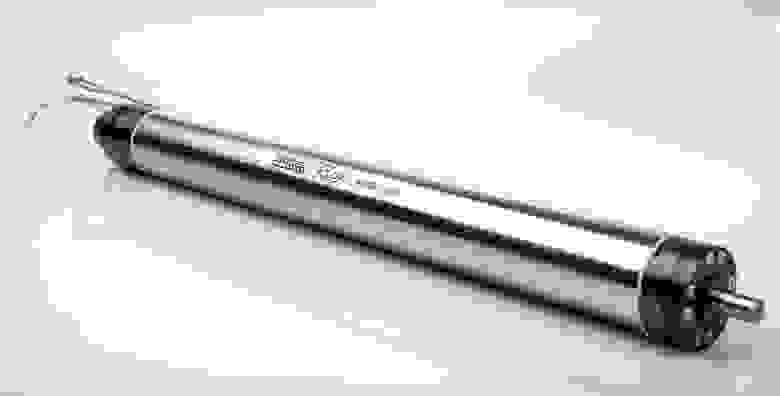
Такая конструкция обладает максимальным моментом удержания в минимальном объёме и она хорошо подходит под нашу задачу. В результате нами был спроектирован и изготовлен следующий образец.

Диаметр данного образца 36мм. Входная часть редуктора выполнена по стандарту NEMA 17. Вместо выходного вала мы сделали универсальную планшайбу, позволяющую прикреплять к ней различную нагрузку в опытных работах, тестах и экспериментах, а при необходимости и установить вал, благодаря базовому посадочному отверстию в центре планшайбы. К слову сказать, концепцию универсальных креплений мы применили и в нашем моторе «Electron», который мы готовим к серийному производству и продажи на территории РФ (о нем мы напишем отдельную статью).
Параметры получившегося редуктора оказались достаточно близки к расчётным. Он обладает понижением 1:10 и способен удержать на выходном валу момент 0.53Нм при статической нагрузке. Это достаточно хороший показатель для таких габаритов. Для сравнения, мотор в тех же габаритах выдаст такой момент с КПД ниже 50%, а система с данным редуктором будет обладать КПД 80%.
Кроме того, редуктор получился очень плавным и тихим. В нём абсолютно не ощущаются какие-либо рывки при вращении, момент передаётся очень мягко. Данное свойство определило название, данное нами редуктору — «Smoother».
Как сделать понижающий редуктор своими руками
Тип редуктора Передаточное число [I] Крутящий момент редуктора Эксплуатационный коэффициент (сервис-фактор) Мощность привода Коэффициент полезного действия (КПД) Взрывозащищенные исполнения Показатели надежности Сервис расчета привода
В данной статье содержится подробная информация о выборе и расчете мотор-редуктора. Надеемся, предлагаемые сведения будут вам полезны.
При выборе конкретной модели мотор-редуктора учитываются следующие технические характеристики:
- тип редуктора;
- мощность;
- обороты на выходе;
- передаточное число редуктора;
- конструкция входного и выходного валов;
- тип монтажа;
- дополнительные функции.
Тип редуктора
Наличие кинематической схемы привода упростит выбор типа редуктора. Конструктивно редукторы подразделяются на следующие виды:
Червячный одноступенчатый со скрещенным расположением входного/выходного вала (угол 90 градусов).
Червячный двухступенчатый с перпендикулярным или параллельным расположением осей входного/выходного вала. Соответственно, оси могут располагаться в разных горизонтальных и вертикальных плоскостях.
Цилиндрический горизонтальный с параллельным расположением входного/выходного валов. Оси находятся в одной горизонтальной плоскости.
Цилиндрический соосный под любым углом. Оси валов располагаются в одной плоскости.
В коническо-цилиндрическом редукторе оси входного/выходного валов пересекаются под углом 90 градусов.
ВАЖНО! Расположение выходного вала в пространстве имеет определяющее значение для ряда промышленных применений.
- Конструкция червячных редукторов позволяет использовать их при любом положении выходного вала.
- Применение цилиндрических и конических моделей чаще возможно в горизонтальной плоскости. При одинаковых с червячными редукторами массо-габаритных характеристиках эксплуатация цилиндрических агрегатов экономически целесообразней за счет увеличения передаваемой нагрузки в 1,5-2 раза и высокого КПД.
Таблица 1. Классификация редукторов по числу ступеней и типу передачи
| Тип редуктора | Число ступеней | Тип передачи | Расположение осей |
| Цилиндрический | 1 | Одна или несколько цилиндрических | Параллельное |
| 2 | Параллельное/соосное | ||
| 3 | |||
| 4 | Параллельное | ||
| Конический | 1 | Коническая | Пересекающееся |
| Коническо-цилиндрический | 2 | Коническая Цилиндрическая (одна или несколько) | Пересекающееся/скрещивающееся |
| 3 | |||
| 4 | |||
| Червячный | 1 | Червячная (одна или две) | Скрещивающееся |
| 1 | Параллельное | ||
| Цилиндрическо-червячный или червячно-цилиндрический | 2 | Цилиндрическая (одна или две) Червячная (одна) | Скрещивающееся |
| 3 | |||
| Планетарный | 1 | Два центральных зубчатых колеса и сателлиты (для каждой ступени) | Соосное |
| 2 | |||
| 3 | |||
| Цилиндрическо-планетарный | 2 | Цилиндрическая (одна или несколько) Планетарная (одна или несколько) | Параллельное/соосное |
| 3 | |||
| 4 | |||
| Коническо-планетарный | 2 | Коническая (одна) Планетарная (одна или несколько) | Пересекающееся |
| 3 | |||
| 4 | |||
| Червячно-планетарный | 2 | Червячная (одна) Планетарная (одна или несколько) | Скрещивающееся |
| 3 | |||
| 4 | |||
| Волновой | 1 | Волновая (одна) | Соосное |
Выбор по типу редуктора для привода
Профессиональный расчет с целью выбора редуктора всегда начинается с проработки схемы привода (кинематической). Именно она лежит в основе соответствия выбранного оборудования условиях будущей эксплуатации. Согласно данной схеме, вы можете выбрать класс мотор-редуктора. Варианты следующие.
- Червячный механизм: одноступенчатая передача, входной вал под прямым углом к выходному валу (скрещенное положение входного вала и выходного вала);
- двухступенчатый механизм с расположением входного вала параллельно или перпендикулярно выходному валу (оси могут располагаться вертикально/горизонтально).
- с параллельным положением входного вала и выходного вала и горизонтальным размещением осей (выходной вал с органом на входе находятся в одной плоскости);
- Цилиндрический и конический моторный редуктор, имея аналогичные червячному приводу вес и размеры, демонстрирует более высокий КПД.
- Передаваемая цилиндрическим редуктором нагрузка в 1,5–2 раза выше, чем у червячного аналога.
- Использование конической и цилиндрической передачи возможно только при размещении по горизонтали.
Передаточное число [I]
Передаточное число редуктора рассчитывается по формуле:
где N1 – скорость вращения вала (количество об/мин) на входе; N2 – скорость вращения вала (количество об/мин) на выходе.
Полученное при расчетах значение округляется до значения, указанного в технических характеристиках конкретного типа редукторов.
Таблица 2. Диапазон передаточных чисел для разных типов редукторов
| Тип редуктора | Передаточные числа |
| Червячный одноступенчатый | 8-80 |
| Червячный двухступенчатый | 25-10000 |
| Цилиндрический одноступенчатый | 2-6,3 |
| Цилиндрический двухступенчатый | 8-50 |
| Цилиндрический трехступенчатый | 31,5-200 |
| Коническо-цилиндрический одноступенчатый | 6,3-28 |
| Коническо-цилиндрический двухступенчатый | 28-180 |
ВАЖНО! Скорость вращения вала электродвигателя и, соответственно, входного вала редуктора не может превышать 1500 об/мин. Правило действует для любых типов редукторов, кроме цилиндрических соосных со скоростью вращения до 3000 об/мин. Этот технический параметр производители указывают в сводных характеристиках электрических двигателей.
Читайте также: N496716 stanley редуктор в сборе
Примеры выбора мотор-редуктора
Пример №1
Исходные данные:
Транспортер для сыпучих материалов
Требуемый крутящий момент на выходном валу M2 = 150 Нхм
Асинхронный электродвигатель n1, =1400 об/мин
Обороты на выходном валу редуктора n2 = 70 об/мин
Работа непрерывная, нереверсивная, толчки средней силы
Радиальная консольная нагрузка, приложенная в середине посадочной части концов выходного вала F вых = 500 Н
Средняя ежесуточная работа 7 часов
Количество включений в час до 10
Условия окружающей среды: температура до 30oС
- Передаточное число редуктора i = n1/n2 = 1400/70 = 20
- Сервис – фактор выбираем по таблице среднего режима работы, используя данные по ежесуточной работе и количеству включений, определяем интерполяцией fs = 1,25
- Увеличиваем сервис – фактор, используя температурный коэффициент fs = 1,25 х 1,1 = 1,38
- Считаем M2n = М2 x fs = 150 х 1,38 = 207 Нхм
- Подбираем редуктор NMRV 90-20 с двигателем 2,2 х 1400 с передаточным числом i=20, развиваемым крутящим моментом M2n = 249 > 207 Нхм, табличным сервис — фактором fs = 1.4 > 1,38.
Пример №2
Исходные данные:
Мешалка для клейкой смеси
Мощность электродвигателя Р1 = 1,5 KW
Асинхронный электродвигатель n1, =900 об/мин
Обороты на выходном валу редуктора n2 = 60 об/мин
Тяжелые условия работы. Работа непрерывная, нереверсивная, без толчков
Средняя ежесуточная работа 16 часов
Количество включений в час до 100
Условия окружающей среды: температура до 20oС
- Передаточное число редуктора i = n1/n2 = 900/60 = 15
- Сервис – фактор выбираем по таблице тяжелого режима работы, используя данные по ежесуточной работе и количеству включений, определяем интерполяцией fs = 1,9
- С учетом температурного коэффициента сервис – фактор составит fs = 1,9 х 1,0 = 1,9
- Считаем Р1n = Р1 х fs= 1,5 х 1,9= 2,85 KW
- Подбираем редуктор NMRV 110-15 с двигателем 3.0 х 900 с передаточным числом i=15, мощностью Р1n = 3.0 > 2.85 KW, табличным сервис — фактором fs = 1.9 ≥ 1.9.
Крутящий момент редуктора
Крутящий момент на выходном валу [M2] – вращающий момент на выходном валу. Учитывается номинальная мощность [Pn], коэффициент безопасности [S], расчетная продолжительность эксплуатации (10 тысяч часов), КПД редуктора.
Номинальный крутящий момент [Mn2] – максимальный крутящий момент, обеспечивающий безопасную передачу. Его значение рассчитывается с учетом коэффициента безопасности – 1 и продолжительность эксплуатации – 10 тысяч часов.
Необходимый крутящий момент [Mr2] – крутящий момент, удовлетворяющим критериям заказчика. Его значение меньшее или равное номинальному крутящему моменту.
Расчетный крутящий момент [Mc2] – значение, необходимое для выбора редуктора. Расчетное значение вычисляется по следующей формуле:
Mc2 = Mr2 x Sf ≤ Mn2
где Mr2 – необходимый крутящий момент; Sf – сервис-фактор (эксплуатационный коэффициент); Mn2 – номинальный крутящий момент.
Магнитный редуктор для бесколлекторного мотора
В данной статье я расскажу о магнитном редукторе, разработанном нами. Данный редуктор планируется использовать в связке с бесколлекторным мотором. В статье будет рассказано о возможной области применения данного редуктора, о его плюсах и минусах по сравнению с обычными редукторами.
Введение
Бесколлекторные электродвигатели (BLDC) обладают крайне высокой мощностью при минимальном размере. Это достигается благодаря мощным редкоземельным магнитам. При создании мотора в маленьком форм-факторе, такие двигатели не имеют конкуренции.
Однако, несмотря на высокую мощность, небольшой размер мотора накладывает на него множество ограничений таких как: небольшой момент, высокие рабочие обороты, маленькая площадь охлаждения. Данные ограничения не позволяют использовать весь потенциал мотора. Так, например, мотор форм-фактора 540 (D=36мм L=54мм) способен выдавать мощность свыше киловатта с достаточно хорошим КПД, но это возможно только при очень высоких оборотах, когда эту мощность снять с мотора становится достаточно сложно. В номинальном режиме такой мотор без принудительного обдува может выдавать 200-400ватт.
Основным направлением нашего коллектива MotoChrome является проектирование и создание бесколлекторных моторов. При проектировании мотора для одного из заказчиков мы как раз столкнулись с проблемами описанными выше. Заказчику был нужен мотор небольшим диаметром, но при этом достаточно высоким моментом и КПД. Чтобы соблюсти требования мотор получился длиной почти полметра при диаметре в 40мм. Мотор получился достаточно дорогим и очень сложным в сборке. При этом, для достижения тех же мощностных параметров, можно сделать мотор в 3 раза меньше, но с использованием редуктора. И в итоге выбран был именно этот вариант.
Использование редуктора кажется хорошим решением. Но с ним возникает множество других проблем, что не позволяет применять их полноценно во всех моторах.
- дополнительный узел, имеющий вероятность поломки, и ограниченный ресурс работы
- увеличение габаритных размеров;
- повышенная шумность, что может быть критичным в работе подводных устройств;
- большинство механических редукторов имеют ограничения по передаваемому крутящему моменту и скорости вала на входном валу редуктора, что в свою очередь накладывает дополнительные ограничения/требования к электромотору.
Подбирая редуктор мы упёрлись в две основные проблемы. 1) Чтобы редуктор смог реализовать весь потенциал бесколлекторного мотора, он должен быть размером сравнимым с размером мотора. С ним мотор перестаёт быть компактным. 2) Большинство механических редукторов не способны работать на высоких оборота (>15000 RPM), а нам интересны именно высокие обороты. Только 1…2 компании согласились взять заказ на требуемый редуктор и поставить его через 3 месяца после получения оплаты. Какова будет его надежность и стойкость нам еще предстоит выяснить, однако трудности, связанные с поиском нужного редуктора, заставили нас думать над этой проблемой дальше.
Неплохим вариантом, с нашей точки зрения, оказался магнитный редуктор. Они пока не получили широкого применения и про них достаточно мало информации, поэтому мы решили поглубже разобраться в данном вопросе и сделать редуктор самостоятельно. Это нам позволит отработать подход к его моделированию и позволит в будущем рассчитывать его параметры.
Магнитный редуктор
Магнитный редуктор мы решили делать по распространённой схеме, которая представляет собой аналог планетарного редуктора. Магниты в , магниты снаружи — «зубчатый венец (эпицикл)», между ними зубцы из магнитомягкого материала выполняют роль «водила».
Такая конструкция обладает максимальным моментом удержания в минимальном объёме и она хорошо подходит под нашу задачу. В результате нами был спроектирован и изготовлен следующий образец.
Диаметр данного образца 36мм. Входная часть редуктора выполнена по стандарту NEMA 17. Вместо выходного вала мы сделали универсальную планшайбу, позволяющую прикреплять к ней различную нагрузку в опытных работах, тестах и экспериментах, а при необходимости и установить вал, благодаря базовому посадочному отверстию в центре планшайбы. К слову сказать, концепцию универсальных креплений мы применили и в нашем моторе «Electron», который мы готовим к серийному производству и продажи на территории РФ (о нем мы напишем отдельную статью).
Параметры получившегося редуктора оказались достаточно близки к расчётным. Он обладает понижением 1:10 и способен удержать на выходном валу момент 0.53Нм при статической нагрузке. Это достаточно хороший показатель для таких габаритов. Для сравнения, мотор в тех же габаритах выдаст такой момент с КПД ниже 50%, а система с данным редуктором будет обладать КПД 80%.
Кроме того, редуктор получился очень плавным и тихим. В нём абсолютно не ощущаются какие-либо рывки при вращении, момент передаётся очень мягко. Данное свойство определило название, данное нами редуктору — «Smoother».
Ещё пара роликов с редуктором
Выводы
После начального тестирования мы смогли выделить следующие плюсы магнитного редуктора по сравнению с механическим:
- Магнитный редуктор тихий
- Не боится больших оборотов. Слабым звеном в нём являются только подшипники, которые также и ограничивают мотор.
- Долговечный. В нём, как и в моторе нечему ломаться кроме подшипников.
- Редуктор способен плавно подавать и удерживать момент. Например, если сделать захват на таком редукторе и зажать хрупкий предмет, то рывок мотора не разрушит его.
- Такой редуктор защищён от перегрузок. Если на вале механического редуктора превысить допустимую нагрузку, то шестерни в нём разрушатся и заклинит, что также может вызвать повреждение мотора или контроллера. Магнитный редуктор просто провернётся и не сломается, а мотор не остановится.
Также мы выявили и ряд недостатков:
- Момент редуктора ограничен объёмом и максимальной силой магнитов. Механический редуктор способен передать гораздо больший момент в том же объёме.
- Магниты редуктора чувствительны к температуре и могут размагнититься при перегреве.
- Так как в редукторе используются магниты из редкоземельных материалов, создание габаритных редукторов такого типа затруднительно.
Читайте также: Ямаха 15 fmhs редуктор
Исходя из полученных результатов мы сформировали области применения для редукторов такого типа:
- в биологии, медицине и других процедурах захвата и перемещения предметов, где требуется точное позиционирование с одной стороны (что достигается безлюфтовостью редуктора) и присутствует высокий риск повреждения предметов, с которыми работает манипулятор, например, тканей и органов человека (присутствующая в магнитном редукторе мягкость выходного ротора и защита от перегрузок позволит ограничить максимальной усилие воздействия на оперируемый предмет).
- в промышленных устройствах, в которых в ограниченных пространствах работают высокоскоростные двигатели (электро или пневматические), крутящий момент которых нужно увеличить, а скорость понизить до требуемого разрешённого значения.
- в подводных приборах, где предъявляются высокие требования к низкой шумности изделия
На данный момент тестирование редуктора продолжается. Мы проводим его испытание в динамике при различных нагрузках и скоростях. Если всё пройдёт успешно, то мы сможем внедрить данную разработку в реальный проект.
Эксплуатационный коэффициент (сервис-фактор)
Сервис-фактор (Sf) рассчитывается экспериментальным методом. В расчет принимаются тип нагрузки, суточная продолжительность работы, количество пусков/остановок за час эксплуатации мотор-редуктора. Определить эксплуатационный коэффициент можно, используя данные таблицы 3.
Таблица 3. Параметры для расчета эксплуатационного коэффициента
| Тип нагрузки | К-во пусков/остановок, час | Средняя продолжительность эксплуатации, сутки | |||
| Читайте также: Взаимосвязь шероховатости и точности обработки. Классы шероховатости, достигаемые различными видами механической обработки | |||||
, где: – коэффициент, зависящий от характера нагрузки,
– коэффициент, зависящий от числа включений в час.
Значения коэффициентов и можно определить, пользуясь нижеприведенными графиками.
Выбирать мотор-редуктор следует с большим коэффициентом эксплуатации FS, чем расчетный.
Характер нагрузки можно принять на основе следующих примеров или исходя из конкретных условий:
Агрегаты, работающие в равномерном режиме работы «А»:
Мешалки для чистых жидкостей, загрузочные устройства для печей, тарельчатый питатель, генераторы, центробежные насосы, транспортеры с равномерно распределенной нагрузкой, шнековые или ленточные транспортеры для легких материалов, вентиляторы, сборочные конвейеры, маленькие мешалки, подъемники малой грузоподъемности, подъемные платформы, очистительные машины, фасовочные машины, контрольные машины.
Агрегаты, работающие в режиме работы с умеренными ударами «В»:
Мешалки для жидкостей и твердых материалов, ленточные транспортеры, средние лебедки, канализационные шнеки, волоконные установки, вакуумные фильтры, ковшовые элеваторы, краны, устройства подачи в деревообрабатывающих станках, подъемники, балансировочные машины, резьбонарезные станки, ленточные транспортеры для тяжелых материалов, домкраты, раздвижные двери, скребковые конвейеры, упаковочные машины, бетономешалки, фрезерные станки, гибочные станки, шестеренные насосы, штабелеукладчики, поворотные столы.
Агрегаты, работающие в режиме работы с сильными ударами «С»:
Лебедки и подъемники для тяжелых грузов, экструдеры, резиновые каландры, прессы для кирпича, строгальные станки, шаровые мельницы, мешалки для тяжелых материалов, ножницы, прессы, центрифуги, шлифовальные станки, камнедробилки, цепные черпаковые подъемники, сверлильные станки, эксцентриковые прессы, гибочные станки, поворотные столы, барабаны, вибраторы, токарные станки, прокатные станы, мельницы для цемента.
Режим работы с умеренными ударами
Режим работы с сильными ударами
– момент инерции внешней нагрузки, приведенный к быстроходному валу: , ;
– момент инерции ротора двигателя, .
Мощность привода
Правильно рассчитанная мощность привода помогает преодолевать механическое сопротивление трения, возникающее при прямолинейных и вращательных движениях.
Элементарная формула расчета мощности [Р] – вычисление соотношения силы к скорости.
При вращательных движениях мощность вычисляется как соотношение крутящего момента к числу оборотов в минуту:
где M – крутящий момент; N – количество оборотов/мин.
Выходная мощность [P2] вычисляется по формуле:
где P – мощность; Sf – сервис-фактор (эксплуатационный коэффициент).
Значение входной мощности всегда должно быть выше значения выходной мощности, что оправдано потерями при зацеплении:
Нельзя делать расчеты, используя приблизительное значение входной мощности, так как КПД могут существенно отличаться.
Устройство и принцип работы мотор редуктора
Как уже отмечалось выше, мотор-редуктор представляет собой моноблок с комбинацией электрического двигателя и редуктора. За счет свой компактности, такие приводные узлы не требуют много усилий при монтаже. Основным элементом узла выступает корпус, в котором объединены электродвигатель и прочие детали в один механизм. Корпус может быть выполнен из металла, чугуна или легких сплавов (зависит от области использования привода).
Редукторная часть включает валы, опирающиеся на подшипники. На валах закрепляются шестерни. Чтобы получить требуемый диапазон передаточных чисел, далеко не всегда можно обойтись одной ступенью. Здесь используют двух-, трех- и четырехступенчатые мотор-редукторы.
Устройство мотор редуктора рассмотрим на примере зубчатого цилиндрического двухступенчатого узла. В данном случае ведущая шестерня первой ступени насаживается на вал двигателя, одновременно выполняющего роль входного вала редуктора. Ведущая шестерня передает крутящий момент на промежуточный вал с блоком шестерен, а потом – на шестерню вторичного вала. Именно в такой последовательности приводится в движение рабочий орган. Принцип работы мотор редуктора одноступенчатого типа куда проще. В картер заключены только два вала, другими словами, для передачи крутящего момента достаточно будет всего двух шестерней.
Конструкция мотор редуктора цилиндрического обуславливает передачу крутящего момента, которая выполняется при непосредственном контакте зубьев зубчатого колеса. Червячный привод вместо цилиндрических шестерен использует червячную передачу, в этом случае крутящийся момент увеличивается с помощью винта специальной формы. Достоинство таких приводов в том, что выходной вал располагается под 90º к двигателю. Важно, чтобы составляющие детали зубчатых передач и валы были выполнены из надежной высокопрочной стали. Чтобы предотвратить преждевременный износ применяют соответствующие смазочные масла.
Использование принципов различных конструкторских решений в процессе производства мотор-редукторов, обусловило их широкий диапазон применения.
Коэффициент полезного действия (КПД)
Расчет КПД рассмотрим на примере червячного редуктора. Он будет равен отношению механической выходной мощности и входной мощности:
где P2 – выходная мощность; P1 – входная мощность.
В червячных редукторах P2
Цилиндрический редуктор – самый распространенный тип редукторов за счет простоты передачи и максимального КПД. Основу редуктора составляют зубчатые передачи – прямозубые цилиндрические или конические или косозубые. Редуктор может состоять из одной или нескольких ступеней. Число ступеней выбирается исходя из требуемого передаточного отношения – чем оно выше, тем большее число ступеней необходимо.
Описание и принцип работы:
Цилиндрический редуктор представляет собой одну или несколько последовательно соединенных цилиндрических передач, заключенных в общий корпус. Редуктор имеет входной и выходной валы, которые посредством муфт или иных соединительных элементов соединяются с двигателем и рабочей машиной соответственно. В свою очередь цилиндрическая зубчатая передача представляет собой пару зубчатых колес, находящихся в зацеплении друг с другом.
Когда к входному валу прикладывается вращающий момент, он, как и закрепленное на нем зубчатое колесо, приводится в движение. Посредством цилиндрической передачи усилие передается от колеса входного вала к колесу, находящемуся с ним в зацеплении. Колеса изготавливаются разных диаметров и с разным количеством зубьев, причем колесо с меньшим числом зубьев называется шестерней, а с большим – колесом. Вращающий момент последовательно передается с входного вала на промежуточный, а с промежуточного на выходной (в случае двухступенчатого редуктора).
Основные характеристики редукторов
Основные характеристики редукторов: КДП, частота вращения входного и выходного валов, передаточное отношение, передаваемая мощность, количество ступеней и тип передач.
Передаточное отношение – это отношение скоростей вращений входного к скорости вращения выходного вала.
КПД редуктора определяется отношением мощности на входном валу к мощности на выходном валу
Классификация цилиндрических редукторов:
Цилиндрические редукторы могут классифицироваться по различным признакам, таким как количество ступеней, виды колес, виды резьбы и т.д. Рассмотрим основные варианты классификации.
В зависимости от типов зубьев колес:
- прямозубые
- косозубые
- криволинейные
- шевронные
Прямозубые колеса наиболее просты в изготовлении, однако именно они являются наиболее шумными по сравнению с косозубыми и шевронными. Кроме того, из-за постоянных ударов при контакте пар зубьев создается вибрация, являющаяся причиной повышенного износа.
Косозубые колеса более сложны по сравнению с прямозубыми, однако эксплуатационные характеристики у них выше, что выражается в меньшей шумности, меньшем износе и повышенной плавности работы. За это приходится расплачиваться возникновением осевой силы, негативные воздействия необходимо компенсировать. Последующим улучшением косозубого колеса можно считать колесо с криволинейными зубьями. У таких колес эксплуатационные характеристики еще выше, но вместе с тем возрастает сложность изготовления такого типа колес, для чего требуется специальное оборудование.
Недостаток косозубых колес в виде возникающей осевой силы может быть решен путем установки на валу второго такого же колеса, но имеющего противоположный наклон зубьев. Тем самым достигается взаимная компенсация осевых сил двумя половинками колеса, которое получило название шевронное. С их помощью можно достигнуть крайне высокой плавности хода. У шевронных колес угол зубьев, как правило, больше, чем у косозубых.
По взаимному расположению валов:
- С параллельными осями валов
- С перекрещивающимися осями валов
Большинство цилиндрических редукторов имеют параллельное расположение валов. В случае если оси входного и выходного вала редуктора совпадают, то такой редуктор называют соостным. Соостный редуктор должен состоять минимум из двух передач, чтобы было возможным размещение входного и выходного вала на одной оси. Если необходима компоновка цилиндрического редуктора с перекрещивающимися осями валов, то используются специальные винтовые колеса.
- Одноступенчатые
- Двухступенчатые
- Трехступенчатые
- Многоступенчатые
Выбор необходимого количества ступеней обуславливается передаточным числом, которое должен обеспечивать цилиндрический редуктор. Различной компоновкой ступеней в редукторе можно добиться различного положения относительно друг друга входного и выходного валов.
Варианты исполнения цилиндрических передач:
самая распространенная за счет рациональной унификации деталей редуктора. Например, одни и те же шестерни и зубчатые колеса можно использовать в разных редукторах, что приводит к удешевлению продукции в серийном производстве.
Также с целью унификации принимают левое направление зубьев для шестерни и правое для колеса. Однако в единичном производстве удобней принимать левое расположение для шестерни и правое для колеса второй ступени из-за того, чтобы уравновесить осевые силы на промежуточном валу и снизить осевые нагрузки на опоры.
Развернутую схему используют при межосевом расстоянии до 800 мм. Редукторы, изготовленные по развернутой схеме, имеют удлиненную форму, что приводит к перерасходу металла до 20% по сравнению с редуктором с раздвоенной схемой.
может применяться для тихоходной и для быстроходной ступеней. Более рациональной является вариант с быстроходной ступенью, так как при нем возможно изготовить промежуточный вал как «вал-шестерню» и плавающий быстроходный вал.
Раздвоеная схема «разносится» за счет использования косозубых передач, фактически получая шевронную передачу.
предусматривает расположение входного и выходного вала на одной оси. Такие редукторы имеют массу и габариты близкие к редукторам с развернутой схемой. В данной схеме быстроходная ступень является недонагруженной, а тихоходная наоборот – перегруженой.
Двухступенчатые цилиндрические редукторы в среднем имеют диапазон передаточных отношений от 6,3, до 70.
Ресурс цилиндрических редукторов – 25 тысяч часов.
Они обладают рядом достоинств, обуславливающих столь широкое их применение:
Цилиндрические редукторы позволяют передавать усилие с высокой эффективностью, что обеспечивает их КПД в районе 98-99%. Во многом это обуславливается незначительными силами трения, возникающими в процессе работы. Это преимущество делает цилиндрические редукторы весьма экономичными, что способствовало их широкому распространению.
Высокий КПД приводит к тому, что лишь малая часть передаваемой энергии теряется безвозвратно. Следствием этого является то, что лишь малая часть энергии идет на нагрев деталей передачи, что и обуславливает низкое тепловыделение. Это преимущество позволяет обходиться без установки на редукторы каких-либо дополнительных систем охлаждения, а также увеличивает эксплуатационную надежность редуктора.
- Способность передавать высокие мощности
Из-за особенностей конструкции цилиндрические редуктора не склонны к заеданиям, высокому КПД и незначительному тепловыделению цилиндрические редукторы хорошо подходят для передачи больших мощностей. Если в отдельных случаях потерями можно пренебречь, когда использование другого типа редукторов более выгодно или единственно применимо, то в крупных агрегатах вопрос энергоэффективности выходит на первое место.
- Надежность работы даже в условиях продолжительных период с частыми пусками-остановами
Данное преимущество во многом обусловлено небольшим трением скольжения в цилиндрической передаче, за счет чего обеспечивается малый износ рабочих деталей. В отличие от червячных редукторов цилиндрические также достаточно надежны в условиях режима работы с частыми пусками и остановами или пульсирующей нагрузкой, так как подобный режим не приводит к чрезмерному увеличению скорости износа.
- Малый люфт выходного вала
В сравнении с червячными редукторами цилиндрические обладают значительно меньшим люфтом выходного вала, за счет чего достигается их высокая относительно других типов редукторов кинематическая точность, что позволяет использовать цилиндрические редуктора в системах, предъявляющих повышенные требования к точности, таких как приводы устройств позиционирования.
- Возможность вращения валов в любую сторону
Данную особенность можно отнести как достоинствам, так и к недостаткам в зависимости от условий применения редуктора. Полная обратимость может быть как полезна, когда необходимо проворачивать выходной вал, так и нежелательна, если, к примеру, рассматривать подъемный механизм, в устройстве которого может возникнуть необходимость дополнительно устанавливать тормозной механизм.
Из недостатков цилиндрических редукторов обычно выделяют следующие пункты:
- Ограничение по передаточному числу
Передаточное отношение одной ступени зубчатой цилиндрической передачи не рекомендуется делать больше 6,3. Соответственно, если от редуктора требуется большее передаточное число, то приходится вводить дополнительные ступени. Это влечет за собой непомерное увеличение габаритов цилиндрического редуктора и возрастание его металлоемкости. В большинстве случаев применение громоздких цилиндрических редукторов с большим передаточным числом является нерациональным.
При работе цилиндрического редуктора линия контакта не постоянна, а возникает вновь при вхождении в контакт очередной пары зубьев. Это приводит к тому, что показатели шумности у цилиндрических редукторов оказываются выше, чем у аналогичных червячных редукторов.
Цилиндрические редукторы являются одним из наиболее распространенных типов редукторов. Сложно назвать область, где бы они ни применялись в большей и меньшей степени. Начиная от строительства и машиностроения, заканчивая робототехникой и военно-промышленным комплексом. Во многом такая распространенность объясняется тем, что цилиндрические редукторы чаще всего используются в электроприводах машин или входят в состав моторов-редукторов. Как упоминалось выше, одной из основных причин такого распространения является высокий КПД цилиндрических редукторов, что делает его использование наиболее экономически выгодным.
Расчет цилиндрического редуктора:
Как правило, перед началом проектирования часть характеристик редуктора уже задана. Положим, что передаточное число и вращающий момент на шестерне известны.
Предварительно определяется ориентировочное значение межосевого расстояния:
aw1 – предварительное межосевое расстояние, мм K – поправочный коэффициент, зависящий от твердости зубьев колеса и шестерни u – передаточное число редуктора Tш – вращающий момент на шестерне, H·м ∓1 – знак плюс соответствует внешнему зацеплению, знак минус – внутреннему
Далее рассчитывается окружная скорость:
v – окружная скорость, м/с aw1 – предварительное межосевое расстояние, мм n1 – частота вращения шестерни, с-1 u – передаточное число редуктора ∓1 – знак плюс соответствует внешнему зацеплению, знак минус – внутреннему
Полученное значение проверяется по таблицам допустимой окружной скорости в зависимости от степени точности передачи.
После этого производят уточнение значения межосевого расстояния:
aw — уточненное межосевое расстояние, мм K1 – поправочный коэффициент (прямозубые колеса – 540; косозубые и шевронные — 410), МПа1/3 u – передаточное число редуктора ±1 – знак плюс соответствует внешнему зацеплению, знак минус – внутреннему KН – поправочный коэффициент нагрузки Tш – вращающий момент на шестерне, H·м [δ] – допустимое напряжение, МПа ψab – коэффициент ширины, зависящий от ширины колес
Полученное значение межосевого расстояния используют для нахождения предварительных геометрических размеров колес.
Рассчитывается минимальное (из условий прочности) и максимальное (из условия неподрезания зубьев) значение модуля передачи:
Km – поправочный коэффициент (прямозубые колеса – 3400; косозубые — 2800) KF – коэффициент нагрузки σF – допустимые напряжения изгиба зубьев колеса или шестерни, МПа
Искомое значение модуля передачи выбирается из полученного диапазона, берется минимальное из стандартного ряда.
Полученное значение модуля зацепления используется для расчета минимального необходимого угла наклона зубьев (в случае косозубых или шевронных колес).
Также с помощью модуля зацепления определяется общее число зубьев:
Полученное значение округляется в меньшую сторону, и с его помощью находится истинное значение угла наклона зубьев:
А также число зубьев шестерни и колеса
Полученное значение не должно быть меньше минимального. Для прямозубых колес оно составляет 17, а для косозубых и шевронных находится по формуле zмин=17·(cosβ)3. В случае, если получившееся значение оказывается меньше минимального, то передачу изготавливают со смещением, чтобы предотвратить подрез зубьев в ходе эксплуатации. Коэффициент смещения рассчитывается по следующей формуле:
Фактическое передаточное число определяется на основе полученных чисел зубьев:
Получившееся значение не должно отличаться от первоначального более чем на 3% (в случае одноступенчатых), на 4% (в случае двухступенчатых) и 5% (в случае многоступенчатых).
Конечные геометрические параметры зубчатых колес:
Делительный диаметр шестерни:
Делительный диаметр колесf:
«+» – для внутреннего зацепления «-» – для внешнего зацепления
В завершение проводится проверочный расчет на прочность.