— продолжительный режим работы без пауз за время включения,
— редкие пуски и неизменное направление вращения,
— преодоление статических моментов при трогании под нагрузкой (после внезапной аварийной остановки),
— влияние окружающей среды (перепад температур, агрессивная среда, запыленность и т. п.).
Требования к электроприводу:
— повышенный пусковой момент(Mп/Mном = 1,6. 1,8);
— плавный пуск и торможение (для предотвращения пробуксовывания ленты или раскачивания груза у ленточных и подвесных);
— небольшое регулирование скорости в диапазоне 1:2 (для изменения темпа работы у поточных линий);
— согласованное вращение электроприводов (для нескольких конвейеров).
Электродвигатели.
• Асинхронные электродвигатели ( АД) с КЗ-ротором и повышенным пусковым моментом (Мп), односкоростные или многоскоростные (с переключением числа пар полюсов).
Примечание — Для регулирования скорости однодвигательного привода конвейера применяются дополнительные вариаторы механические или рагулируемые электрические и гидравлические муфты.
• АД с фазным ротором:
— на конвейерах, требующих повышенного пускового момента;
— при многодвигательном приводе конвейеров (для выравнивания нагрузок отдельных двигателей);
— при обеспечении согласованного движения конвейеров.
Многодвигательный привод.
Применяется при большой протяженности конвейеров.
Использование нескольких приводных станций позволяет избежать больших напряжений в механизмах, перегрузки участков, уменьшить габариты тягового органа и величину тяговых усилий.
При этом тяговый орган каждой приводной станции передает усилие, пропорционаяьное статическому сопротивлению только одного участка, а не всего конвейера.
Выбор места установки приводных станций определяется в соответствии с диаграммой изменения усилий натяжения.
Оптимальное количество приводных станций определяется техникоэко-номическими расчетами.
Приводные АД с КЗ-ротором должны иметь одинаковые параметры, у АД с фазным ротором характеристики в соответствие можно привести введением дополнительных сопротивлений в цепь их роторов.
Электропривод синхронного вращения.
Есть механизмы, привод которых состоит из одинаковых двигателей (два и более), требующих вращения с равными скоростями.
Примерами могут быть механизмы башенных кранов, створов разводных мостов, ворот шлюзов, конвейеров, где требуется согласованное вращение электродвигателей, а соединение их механическим валом невозможно.
В этом случае применяется электрическая связь между роторами асинхронных (АД) или синхронных (СД) двигателей, называемая электрическим валом.
Достичь этого можно, применяя специальные схемы, три из которых рассматриваются.
Схема «электрического вала» с вспомогательным АД представлена на рис. 3.3-4.



Схема «электрического вала» с резисторами представлена на рис. 3.3-5



Схема «электрического вала» двойного питания представлена на рис. 3.3-6.



Принципиальная электрическая схема управления ЭП двух совместно работающих конвейеров (рис. 3.3-7) предназначена для управления, защиты и сигнализации электроприводов двух ленточных конвейеров.



Принципиальная электрическая схема управления ЭП двух согласованно движущихся конвейеров (рис. 3.3-8) предназначена для управления, защиты и согласования двух электроприводов конвейеров.
Электрический вал и его применение в электроприводе станков

В статье рассмотрены устройство, принцип действия и примеры использования электрических систем синхронного вращения (электрический вал) в станках и установках.
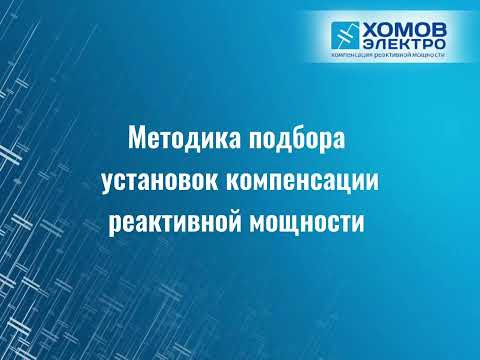
Допустим, что два вала, не имеющие механической связи друг с другом, должны вращаться с одинаковыми скоростями, не поворачиваясь друг относительно друга. Для обеспечения такого синхронного и синфазного вращения с двигателями Д1 и Д2, которые вращают соответственно валы I и II (рис. 1), связывают вспомогательные асинхронные машины А1 и А2 с фазными роторами. Роторные обмотки этих машин соединяют друг с другом встречно.
Если частоты вращения обеих машин и положения их роторов одинаковые, то электродвижущие силы, наведенные в обмотках роторов машин А1 и А2, равны и направлены навстречу друг другу (рис. 2, а), и ток в цепи роторов не протекает.
Читайте также: Как снять крестовину с рулевого вала ниссан ад
Предположим, что направление вращения поля вспомогательных машин совпадает с направлением вращения их роторов. При замедлении вращения машины А2 ее ротор отстанет от ротора А1, вследствие чего э. д. с. Ер2, наведенная в обмотке ротора, сместится по фазе в сторону опережения (рис. 2, б), и в цепи роторов машин А1 и А2 под действием векторной суммы э. д. с. Е появится уравнительный ток I .
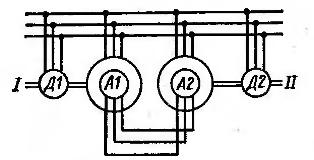
Рис. 1. Схема синхронной связи
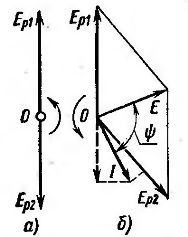
Рис. 2. Векторные диаграммы системы синхронной связи
Вектор тока I будет отставать от вектора э. д. с. Е на угол φ . Проекция вектора тока I на вектор э. д. с. Ер2 совпадает с этим вектором по направлению. Проекция вектора тока на вектор э. д. с. Ер1 направлена навстречу ему. Из этого следует, что машина А2 будет работать в режиме двигателя, а машина А1 — в режиме генератора. При этом вал машины А2 получит ускорение, а вал машины A1 — замедление. Таким образом, машины разовьют моменты, восстанавливающие синхронное вращение валов I и II и прежнее согласованное положение в пространстве роторов машин А1 и А2. Роторы этих машин могут вращаться как по направлению вращения поля, так и в противоположном направлении.
Данная система носит название электрической системы синхронного вращения . Ее называют также электрическим валом . Система синхронного вращения может заменить, например, ходовые винты у токарно-винторезных станков.
Так как цепи подачи металлорежущих станков по сравнению с цепями главного движения потребляют обычно малую мощность, то для синхронизации главного движения с подачей может быть применена более простая схема синхронного вращения (рис. 3 ). В этом случае неизбежно постоянное рассогласование между положениями роторов машин А1 и А2, без чего в цепи ротора машины А2 не было бы тока и она не смогла бы преодолеть момент сил сопротивления цепи подачи. Так как машина А2 получает питание от статора и ротора, то при данной системе электрического вала требуется шестипроводная подводка к двигателю, установленному во многих случаях на движущемся узле станка, условно показанном на рисунке штриховой линией.
Рис. 3. Системы синхронной связи тяжелого токарно-винторезного станка
В пределах углового рассогласования, не превышающего 90°, электрический синхронизирующий момент возрастает. Для обеспечения значительного синхронизирующего момента машины синхронной связи при всех возможных угловых частотах вращения должны работать с большими скольжениями (не менее 0,3 — 0,5). Поэтому во избежание недопустимого нагрева эти машины должны быть достаточно больших размеров.
Мощность машин дополнительно увеличивают, стремясь исключить влияние колебаний нагрузки и сил трения. Применяют также механические передачи, понижающие частоту вращения валов станка, а следовательно, и величину угловой ошибки, приведенной к валу станка. Перед началом работы электрического вала асинхронные машины А1 и А2 включают на однофазное питание. При этом ротор машины А2 занимает исходное положение, согласованное с положением ротора машины А1.
Системы синхронного вращения рационально применять для тяжелых станков, так как изготовление длинных ходовых винтов связано со значительными трудностями. Кроме того, с увеличением длины винтов или валов, вследствие их скручивания, точность согласования взаимного расположения частей станка уменьшается. В системе электрического вала расстояние между валами никакого влияния на точность работы оказать не может.
При использовании электрического вала исключаются, механические связи суппортов со шпинделем и сильно упрощается кинематическая схема. Существенным недостатком систем электрического вала в тяжелых станках является возможность порчи дорогостоящей заготовки при перерыве в электроснабжении, так как при этом сразу возникает рассогласование. В некоторых случаях при такой аварии порча заготовки может быть предотвращена путем быстрого автоматического отвода инструмента.
Читайте также: Прирост мощности от валов
Для станкостроения интерес представляет схема с двумя одинаковыми асинхронными двигателями с фазными роторами (рис. 4). Так как цепь обоих роторов замкнута на реостат R, то при подключении двигателей к сети переменного тока оба ротора начинают вращаться.
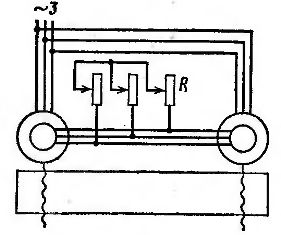
Рис. 4. Схема синхронной связи с роторным реостатом
Помимо токов, протекающих в обмотках роторов и реостате, в цепи роторов обеих машин течет уравнительный ток. Наличие этого тока обусловливает появление синхронизирующего момента, вследствие чего машины вращаются синхронно. Такая система может быть использована для подъема и опускания поперечин крупных строгальных, продольно-фрезерных и карусельных станков.
Благодаря системе электрического вала решается проблема согласованного движения конвейеров, входящих в единый производственный комплекс. Наибольшее практическое применение в этом случае получил вариант синхронного вращения двигателей с общим преобразователем частоты.
Кроме рассмотренных систем электрического вала для станкостроения разрабатывались и применялись и другие системы с машинами переменного тока, в том числе однофазные системы и системы с синхронными двигателями специальной конструкции.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Видео:Монтаж и подключение конденсаторных установок, "Хомов электро"Скачать

Онлайн журнал электрика
Видео:Основы частотно регулируемого электроприводаСкачать

Статьи по электроремонту и электромонтажу
Видео:Технические мероприятия при производстве работ в электроустановкахСкачать

Электрический вал и его применение в электроприводе станков

В статье рассмотрены устройство, принцип деяния и примеры использования электронных систем синхронного вращения (электронный вал) в станках и установках.
Допустим, что два вала, не имеющие механической связи вместе, должны крутиться с схожими скоростями, не делая поворот друг относительно друга. Для обеспечения такового синхронного и синфазного вращения с движками Д1 и Д2, которые крутят соответственно валы I и II (рис. 1), связывают вспомогательные асинхронные машины А1 и А2 с фазными роторами. Роторные обмотки этих машин соединяют вместе встречно.
Если частоты вращения обеих машин и положения их роторов однообразные, то электродвижущие силы, наведенные в обмотках роторов машин А1 и А2, равны и ориентированы навстречу друг дружке (рис. 2, а), и ток в цепи роторов не протекает.
Представим, что направление вращения поля вспомогательных машин совпадает с направлением вращения их роторов. При замедлении вращения машины А2 ее ротор отстанет от ротора А1, вследствие чего э. д. с. Ер2, наведенная в обмотке ротора, сместится по фазе в сторону опережения (рис. 2, б), и в цепи роторов машин А1 и А2 под действием векторной суммы э. д. с. Е появится уравнительный ток I .

Рис. 1. Схема синхронной связи

Рис. 2. Векторные диаграммы системы синхронной связи
Вектор тока I будет отставать от вектора э. д. с. Е на угол φ . Проекция вектора тока I на вектор э. д. с. Ер2 совпадает с этим вектором по направлению. Проекция вектора тока на вектор э. д. с. Ер1 ориентирована навстречу ему. Из этого следует, что машина А2 будет работать в режиме мотора, а машина А1 — в режиме генератора. При всем этом вал машины А2 получит ускорение, а вал машины A1 — замедление. Таким макаром, машины разовьют моменты, восстанавливающие синхронное вращение валов I и II и прежнее согласованное положение в пространстве роторов машин А1 и А2. Роторы этих машин могут крутиться как по направлению вращения поля, так и в обратном направлении.
Читайте также: Должен ли быть люфт первичного вала кпп ваз 2107
Данная система носит заглавие электронной системы синхронного вращения . Ее именуют также электронным валом . Система синхронного вращения может поменять, к примеру, ходовые винты у токарно-винторезных станков.
Потому что цепи подачи металлорежущих станков по сопоставлению с цепями головного движения потребляют обычно малую мощность, то для синхронизации головного движения с подачей может быть использована более обычная схема синхронного вращения (рис. 3 ). В данном случае безизбежно неизменное рассогласование меж положениями роторов машин А1 и А2, без чего в цепи ротора машины А2 не было бы тока и она не смогла бы преодолеть момент сил сопротивления цепи подачи. Потому что машина А2 получает питание от статора и ротора, то при данной системе электронного вала требуется шестипроводная подводка к движку, установленному в почти всех случаях на передвигающемся узле станка, условно показанном на рисунке штриховой линией.

Рис. 3. Системы синхронной связи томного токарно-винторезного станка
В границах углового рассогласования, не превосходящего 90°, электронный синхронизирующий момент растет. Для обеспечения значимого синхронизирующего момента машины синхронной связи при всех вероятных угловых частотах вращения должны работать с большенными скольжениями (более 0,3 — 0,5). Потому во избежание недопустимого нагрева эти машины должны быть довольно огромных размеров.
Мощность машин дополнительно наращивают, стремясь исключить воздействие колебаний нагрузки и сил трения. Используют также механические передачи, понижающие частоту вращения валов станка, а как следует, и величину угловой ошибки, приведенной к валу станка. До работы электронного вала асинхронные машины А1 и А2 включают на однофазовое питание. При всем этом ротор машины А2 занимает начальное положение, согласованное с положением ротора машины А1.
Системы синхронного вращения правильно использовать для томных станков, потому что изготовка длинноватых ходовых винтов связано со значительными трудностями. Не считая того, с повышением длины винтов либо валов, вследствие их скручивания, точность согласования обоюдного расположения частей станка миниатюризируется. В системе электронного вала расстояние меж валами никакого воздействия на точность работы оказать не может.
При использовании электронного вала исключаются, механические связи суппортов со шпинделем и очень упрощается кинематическая схема. Значимым недочетом систем электронного вала в томных станках является возможность порчи дорогостоящей заготовки при перерыве в электроснабжении, потому что при всем этом сходу появляется рассогласование. В неких случаях при таковой аварии порча заготовки может быть предотвращена методом резвого автоматического отвода инструмента.
Для станкостроения энтузиазм представляет схема с 2-мя схожими асинхронными движками с фазными роторами (рис. 4). Потому что цепь обоих роторов замкнута на реостат R, то при подключении движков к сети переменного тока оба ротора начинают крутиться.

Рис. 4. Схема синхронной связи с роторным реостатом
Кроме токов, протекающих в обмотках роторов и реостате, в цепи роторов обеих машин течет уравнительный ток. Наличие этого тока обусловливает возникновение синхронизирующего момента, вследствие чего машины крутятся синхронно. Такая система может быть применена для подъема и опускания поперечин больших строгальных, продольно-фрезерных и карусельных станков.
Благодаря системе электронного вала решается неувязка согласованного движения конвейеров, входящих в единый производственный комплекс. Наибольшее практическое применение в данном случае получил вариант синхронного вращения движков с общим преобразователем частоты.
Не считая рассмотренных систем электронного вала для станкостроения разрабатывались и применялись и другие системы с машинами переменного тока, в том числе однофазовые системы и системы с синхронными движками специальной конструкции.
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала
🔍 Видео
Основы управления частотно регулируемым электроприводомСкачать

ЧАСТОТНЫЙ ПРЕОБРАЗОВАТЕЛЬ - КАК РАБОТАЕТ И ДЛЯ ЧЕГО НУЖЕН. #Электричество #МИ #ОВИКСкачать
Ввод в эксплуатацию КРМ, "Хомов Электро"Скачать
Транспортные машины и механизмы.Скачать
Порядок вскрытия электрооборудования в шахтеСкачать
Автоматизированное проектирование электрооборудования в КОМПАС-ЭлектрикСкачать
Ленточный конвейер с регулировкой угла наклонаСкачать
Подъёмно-транспортное оборудование мясокомбинатов | ТО мясокомбинатов | Лекция 2Скачать
Методика подбора установок компенсации реактивной мощности "Хомов Электро"Скачать
Основное электрооборудование станций и подстанций: трансформаторы, ЛЭП, шинопроводы, SMART GRIDСкачать
Сборка "внутрянки" базовой станции. Поэтапно.Скачать
Калимжанов А. А._Учебная практика_Тема Особенности экспл-и и констр-ного исп-ия электрооб-ия для ГПСкачать
7.1. Когенерация. Когенерационные установкиСкачать