Взаимосвязанный электропривод. Для приведения в движение исполнительных органов ряда рабочих машин используются не один, а два или более электродвигателей, что позволяет получить некоторые специфические механические характеристики ЭП, снизить суммарный момент инерции системы по сравнению с однодвигательными приводами ЭП, создавать мощные ЭП на базе серийных двигателей относительно небольшой мощности, повысить надежность работы привода за счет резервирования, а в ряде случаев — упростить механическую часть его и рабочих машин.
Если два или несколько двигателей работают на общий вал (механически связаны между собой), то такой взаимосвязанный ЭП называется многодвигательным. Взаимосвязанный ЭП, обеспечивающий совместную работу двух или нескольких двигателей, валы которых не имеют непосредственной механической связи, а их взаимодействие обеспечивается электрической схемой, называется электрическим валом.
В качестве примеров можно назвать взаимосвязанные ЭП поворотных платформ мощных экскаваторов и крупных портальных кранов, шлюзовых затворов и аэродинамической трубы.
Электропривод с механическим соединением валов двигателей. При механическом соединении валов двигателей скорость их одинакова, а момент ЭП представляет собой алгебраическую сумму моментов отдельных двигателей. Запишем суммарный момент двух двигателей, имеющих прямолинейные характеристики: М = М1 + М2=Мк1(w01-w)/w01+Мк2(w02-w)/w02, где Мк1, Мк2, w01, w02 — соответственно моменты короткого замыкания, скорости холостого хода, w — текущая скорость.
Механическая характеристика ЭП в этом случае имеет в два раза большую жесткость, а скорость его идеального холостого хода соответствует скорости холостого хода каждого двигателя. Нагрузка электродвигателей с идентичными характеристиками распределяется между ними равномерно.
В большинстве случаев механические характеристики двигателей не являются идентичными и они могут иметь различные скорости идеального холостого хода или жесткости. При совместной работе таких двигателей распределение нагрузки между ними происходит неравномерно.
Вопрос 10. Потери мощности и энергии в установившемся режиме работы электропривода.
Потери мощности ΔР в электродвигателе удобно представить суммой двух составляющих потерь — постоянных К и переменных V, т. е. ΔР = К+V. Под постоянными подразумеваются потери мощности, не зависящие от нагрузки двигателя. К ним относятся потери в стали магнитопровода, механические потери от трения в подшипниках и вентиляционные потери. Под переменными подразумеваются потери, выделяемые в обмотках двигателей при протекании по ним токов, определяемых механической нагрузкой ЭП. Переменные потери мощности в двигателе могут быть в общем случае определены через электрические или механические переменные и параметры. В двигателях постоянного тока переменные потери мощности Потери мощности при работе двигателя в номинальном режиме определяются по его паспортным данным с помощью номинального КПД и номинальной мощности двигателя: ΔPНОМ= PНОМ(1-ηНОМ)/ηНОМ.
Потери энергии в двигателе.За время работы tp двигателя с постоянной нагрузкой полные потери энергии, обусловленные К и V, ΔА=ΔPtp
Потери мощности и энергии в преобразователеявляются электрическими. При использовании для управления двигателями полупроводниковых преобразователей потери в них складываются из потерь в вентилях, трансформаторах, сглаживающих и уравнительных реакторах, фильтрах и элементах устройств искусственной коммутации. Потери в полупроводниковых элементах преобразователей обычно относительно малы (несколько процентов от номинальной мощности).
Потери мощности в маломощной системе управления обычно не превышают нескольких десятков ватт и принимаются во внимание только при выполнении точных энергетических расчетов.
Потери мощности в механической передачеопределяются главным образом трением в движущихся частях и существенно зависят от передаваемого момента. Потери в механической передаче обычно оцениваются с помощью КПД, значение которого для разных ее видов и нагрузок приводятся в справочной литературе.
Читайте также: Что будет с домами 24 по преображенскому валу
Дата добавления: 2018-02-15 ; просмотров: 890 ; Мы поможем в написании вашей работы!
Видео:Основы центровки валовСкачать

Вопрос 9.Взаимосвязанный электропривод. Электропривод с механическим соединением валов.
Взаимосвязанный электропривод. Для приведения в движение исполнительных органов ряда рабочих машин используются не один, а два или более электродвигателей, что позволяет получить некоторые специфические механические характеристики ЭП, снизить суммарный момент инерции системы по сравнению с однодвигательными приводами ЭП, создавать мощные ЭП на базе серийных двигателей относительно небольшой мощности, повысить надежность работы привода за счет резервирования, а в ряде случаев — упростить механическую часть его и рабочих машин.
Если два или несколько двигателей работают на общий вал (механически связаны между собой), то такой взаимосвязанный ЭП называется многодвигательным. Взаимосвязанный ЭП, обеспечивающий совместную работу двух или нескольких двигателей, валы которых не имеют непосредственной механической связи, а их взаимодействие обеспечивается электрической схемой, называется электрическим валом.
В качестве примеров можно назвать взаимосвязанные ЭП поворотных платформ мощных экскаваторов и крупных портальных кранов, шлюзовых затворов и аэродинамической трубы.
Электропривод с механическим соединением валов двигателей. При механическом соединении валов двигателей скорость их одинакова, а момент ЭП представляет собой алгебраическую сумму моментов отдельных двигателей. Запишем суммарный момент двух двигателей, имеющих прямолинейные характеристики: М = М1 + М2=Мк1(w01-w)/w01+Мк2(w02-w)/w02, где Мк1, Мк2, w01, w02 — соответственно моменты короткого замыкания, скорости холостого хода, w — текущая скорость.
Механическая характеристика ЭП в этом случае имеет в два раза большую жесткость, а скорость его идеального холостого хода соответствует скорости холостого хода каждого двигателя. Нагрузка электродвигателей с идентичными характеристиками распределяется между ними равномерно.
В большинстве случаев механические характеристики двигателей не являются идентичными и они могут иметь различные скорости идеального холостого хода или жесткости. При совместной работе таких двигателей распределение нагрузки между ними происходит неравномерно.
Вопрос 10.Потери мощности и энергии в установившемся режиме работы электропривода.
Потери мощности ΔР в электродвигателе удобно представить суммой двух составляющих потерь — постоянных К и переменных V, т. е.ΔР = К+V. Под постоянными подразумеваются потери мощности, не зависящие от нагрузки двигателя. К ним относятся потери в стали магнитопровода, механические потери от трения в подшипниках и вентиляционные потери. Под переменными подразумеваются потери, выделяемые в обмотках двигателей при протекании по ним токов, определяемых механической нагрузкой ЭП. Переменные потери мощности в двигателе могут быть в общем случае определены через электрические или механические переменные и параметры. В двигателях постоянного тока переменные потери мощности Потери мощности при работе двигателя в номинальном режиме определяются по его паспортным данным с помощью номинального КПД и номинальной мощности двигателя: ΔPНОМ= PНОМ(1-ηНОМ)/ηНОМ.
Потери энергии в двигателе.За время работыtp двигателя с постоянной нагрузкой полные потери энергии, обусловленные К и V, ΔА=ΔPtp
Потери мощности и энергии в преобразователеявляются электрическими. При использовании для управления двигателями полупроводниковых преобразователей потери в них складываются из потерь в вентилях, трансформаторах, сглаживающих и уравнительных реакторах, фильтрах и элементах устройств искусственной коммутации. Потери в полупроводниковых элементах преобразователей обычно относительно малы (несколько процентов от номинальной мощности).
Читайте также: Размер подшипника первичного вала газель бизнес
Потери мощности в маломощной системе управления обычно не превышают нескольких десятков ватт и принимаются во внимание только при выполнении точных энергетических расчетов.
Потери мощности в механической передачеопределяются главным образом трением в движущихся частях и существенно зависят от передаваемого момента. Потери в механической передаче обычно оцениваются с помощью КПД, значение которого для разных ее видов и нагрузок приводятся в справочной литературе.
Дата добавления: 2018-02-15 ; просмотров: 493 ; Мы поможем в написании вашей работы!
Видео:Ременная передача. Урок №3Скачать

5.1. Электропривод с механическим соединением валов

При механическом соединении валов двухдвигателей в статическом режиме угловая скорость их будет одинакова, а результирующий момент, развиваемый электроприводом, равен:

—модули жесткости механиче-
ских характеристик и соответственно угловые скорости холостого хода каждого двигателя.
Из (5.2) находим уравнение механической характери-стики двухдвигательного электропривода:
Н
 а рис. 5.1 тонкой линией показана механическая характеристика двигателя постоянного тока независимоговозбуждения. Каждый из двух взаимосвязанных двига-телей имеет такую характеристику . Результирующая характеристика привода показана утолщенной линией 1.
а рис. 5.1 тонкой линией показана механическая характеристика двигателя постоянного тока независимоговозбуждения. Каждый из двух взаимосвязанных двига-телей имеет такую характеристику . Результирующая характеристика привода показана утолщенной линией 1.

Так как , то (5.3) примет

вид: (5.4)

где
Как следует из (5.4), результирующая характеристика привода проходит через точку 0, жесткость результирующей характеристики равна сумме жесткостей отдельных двигателей.

Рис. 5.1. Механические харак- Рис. 5.2. Механические харак-
теристики двухдвигательного теристики двухдвигательного
привода постоянного тока. привода при вентиляторной на-
На рис. 5.1 показано, что момент нагрузки М = Мс равномерно распределяется между обоими двигателями и они оказываются одинаково загруженными.
Взаимосвязанный привод может быть как нерегулируемым, так и регулируемым. Например, если два двигателя постоянного тока с независимым возбуждением включены параллельно и требуется регулировать скорость привода, то это можно осуществить изменением подводимого напряжения или другим известным способом. При пониженном напряжении результирующая механическая характеристика привода 2 параллельна характеристике 1 (рис. 5.1). При пониженной угловой скорости и одинаковых параметрах привода распределение нагрузки будет также равномерным.
В случае регулирования угловой скорости при вентиляторном законе изменения нагрузки (рис. 5.2) и снижении угловой скорости до определенного значения работают оба двигателя. Затем один из двигателей отключается и нагрузка преодолевается только другим двигателем. Жесткость характеристики одного двигателя меньше жесткости результирующей характеристики.
Механические характеристики упомянутых двигателей могут иметь различную жесткость из-за различных, сопротивлений цепей якорей или вследствие неодинаковых токов возбуждения; тогда при совместной работе двигателей

Рис. 5.3. Механические харак- Рис. 5.4. Механические харак теристики двухдвигательного теристики двухдвигательного привода при различных сопро- привода при различных токах тивлениях якорных цепей дви- возбуждения двигателей посто- гателей постоянного тока неза- янного тока независимого воз- висимого возбуждения. буждения.
распределение нагрузки между ними неодинаково. Характеристики отдельных двигателей при различных сопротивлениях цепей якорей и результирующая характеристика даны на рис. 5.3.
Всоответствии с (5.2) можно найти распределение нагрузки М =Мс между двигателями:

Механические характеристики двух двигателей постоянного тока независимого возбуждения при различных токах возбуждения показаны на рис. 5.4. Распределение нагрузки между двигателями в данном случае
Из (5.6) следует, что двигатель, имеющий меньшую скорость идеального холостого хода, может развивать момент в генераторном режиме параллельно с сетью, хотя привод работает в двигательном режиме, при этом оказывается, что другой двигатель преодолевает не только момент сопротивления, но и тормозной момент двигателя, работающего в генераторном режиме (рис. 5.4).
Читайте также: Классификация коробок передач по расположению валов
Совместная работа двигателей постоянного тока последовательного возбуждения обеспечивает более равномерное распределение нагрузок, чем в случае двигателей независимого возбуждения, даже при той же разнице

Рис. 5.5. Схема параллельного соединения двух двигателей постоянного тока независимого возбуждения при различных сопротивлениях цепей якорей и разных угловых скоростях идеального холостого хода при совместной работе на общий вал.

Рис. 5.6. Схема последовательного включения двигателей при совместной работе на общий вал.
в сопротивлениях, так как характеристики этих двигателей обладают меньшей жесткостью.
При одинаковых угловых скоростях идеального холостого хода и параллельном соединении цепей якорей двигателей постоянного тока независимого возбуждения, имеющих разные сопротивления, необходимо в цепь якоря двигателя, имеющую меньшее сопротивление, включить постоянный добавочный резистор (рис. 5.5). Аналогичным способом, т. е. включением постоянных дополнительных резисторов в цепь ротора, можно, например, добиться достаточно равномерного распределения нагрузок между асинхронными двигателями, имеющими неодинаковую жесткость механических характеристик в их рабочей части.
При различных угловых скоростях идеального холостого хода двух двигателей независимого возбуждения можно путем введения дополнительных резисторов в обмотки
возбуждения уменьшить неравномерное распределение нагрузок (рис. 5.5).
Равномерное распределение нагрузок при неодинаковых сопротивлениях цепей якорей может быть также осуществлено путем последовательного соединения двигателей (рис. 5.6), если напряжение сети окажется достаточным для получения необходимой угловой скорости.
Так как токи в цепи якорей обоих двигателей одинаковы, то при одинаковой угловой скорости напряжение на выводах якоря одного двигателя

ана выводах якоря другого двигателя
Следовательно, напряжение на якоре двигателя с большим сопротивлением будет выше, а с меньшим — ниже.

Рис. 5.7. Механические характеристики двухдвигательного привода при последовательном соединении якорных цепей двух двигателей постоянного тока независимого возбуждения.
При этом можно себе представить, что характеристика oа переместится параллельно самой себе вверх, а oб — соответственно вниз (рис. 5.7). В точке в обе характеристики пересекутся при одном и том же моменте на каждом двигателе.
В переходных процессах распределение нагрузок может ухудшаться по той причине, что связь между двигателями не является абсолютно жесткой, что создает благоприятные условия для развития механических колебаний, обусловленных действием возмущений со стороны электрической части привода и внутренними и внешними возмущениями. Колебания упругосвязанных масс всегда вызывают дополнительные динамические нагрузки передач, которые при неблагоприятных условиях могут достигать опасных значений.
Исследования динамики многодвигательных электромеханических систем показали, что рассмотренные особенности двухдвигательного электропривода характерны и для большего числа двигателей, причем с возрастанием числа двигателей динамические процессы усложняются. Поэтому для многодвигательных электроприводов приходится отказываться от последовательного соединения двигателей, переходя к другим схемам соединения силовых цепей, обеспечивающим демпфирование любых возникающих в системе колебаний.
Число возможных схем соединения двигателей увеличивается при возрастании числа двигателей многодвигательного электропривода.
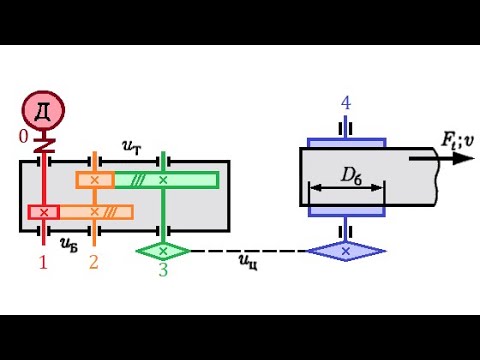
Заслуживает внимания многодвигательный электропривод с индивидуальным питанием двигателей от отдельных управляемых преобразователей, в котором осуществляется индивидуальное управление током каждого двигателя и его угловой скоростью во всех режимах. Однако при этом увеличиваются габариты установки из-за дробления мощности преобразователя. Поэтому в тех случаях, когда влиянием зазоров и погрешностей передач на динамические нагрузки электромеханической системы можно пренебречь, рациональным является использование последовательного соединения двигателей.
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала
🔥 Видео
✅Умные 👌узлы для самоделок .mechanical componentsСкачать

Видео обзор промышленных муфт. Соединительная муфта для валовСкачать
Соединение приводных валов от Нивоводца.Скачать
Кольцевой пружинный привод (соединение) 1Скачать
МуфтыСкачать
Лекция 12. МуфтыСкачать
Лепестковые муфтыСкачать
10.1 МуфтыСкачать
Как из двух валов сделать один.Скачать
6.2 Кинематический расчет приводаСкачать
Соединение электродвигателя и насосаСкачать
ЭЛАСТИЧНАЯ МУФТА ДЛЯ ГИДРОНАСОСА СВОИМИ РУКАМИ/ КАК СДЕЛАТЬ ЭЛАСТИЧНУЮ МУФТУ СВОИМИ РУКАМИСкачать
#АвиловАлексей - Муфты (Легко и просто | AvMedia)Скачать
МЕРТВАЯ болгарка поднимает 1200 кг. МОЩНАЯ самоделка ИЗ ХЛАМА.Скачать
Кольцевой пружинный привод (соединение) 2Скачать
3 способа установки комплектующих на вал электродвигателя или оборудовагияСкачать
Монтаж муфты насоса Corken FD-150Скачать
Бесцентровая Эластичная Муфта Для Гранулятора! Centerless Elastic Clutch for the Granulator!Скачать