В середине 90-х годов для обеспечения безопасности и комфорта на автомобиле «представительского» класса могло быть от 10 до 15 блоков управления.
В настоящее время такого количества блоков управления уже недостаточно, оно увеличилось, возможно, в два раза (или больше).
Такое стремительное увеличение количества блоков управления заставило производителей искать новые пути решения задач для поддержания бесперебойной и стабильной связи между блоками управления.
И в настоящий момент уже существуют следующие технологии передачи данных:
– шина LIN (однопроводная шина)
– шина MOST (оптоволоконная шина)
– беспроводная шина Bluetoot h
В данной статье мы рассмотрим шину LIN .
Шина под названием » LIN » — это сокращение от полного названия: » Local Interconnect Network «, то есть, «локальная коммутируемая сеть».
Это означает. что все коммутируемые блоки управлению подключены и располагаются в пределах одного ограниченного пространства, например, крыши автомобиля, двери автомобиля и так далее.
Обмен данными между коммутируемыми блоками системы LIN происходят по шине данных CAN .
У шины LIN есть особенность: она однопроводная.
Цвет изоляции провода — фиолетовый (на нем может быть цветная маркировка).
Толщина провода (площадь поперечного сечения) составляет около 0.35 мм2.
Провода шины LIN экранировать не обязательно.
Однако, как уже говорилось, скорости передачи данных по шине CAN и шине LIN различные.
Различными также являются и сигналы.
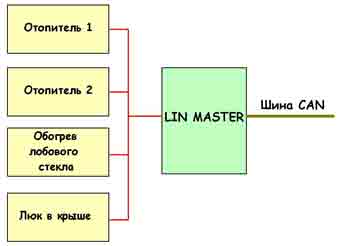
Для этого был придуман так называемый «Блок управления LIN-Master «, который является своеобразным «переводчиком» между шиной LIN и шиной CAN :
У этого блока существует довольно много задач:
— контроль передачи данных
— контроль скорости передачи данных
— постоянная диагностика работоспособоности всех блоков, подключенных к шине LIN
Итак, что такое LIN Master мы разобрались.
Но есть еще такое понятие, как LIN Slave .
Это не что иное, как исполнительные механизмы, электронные или электронномеханические узлы или блоки, получающие команды от блока LIN Master .
Но не только команды.
Может (и постоянно идет) опрос всех подключенных компонентов по текущему и фактическому состоянию, для своевременного обнаружения неисправности и возможности выполнять заданные функции.
Как видно из фото 1, для нескольких исполнительных механизмов требуется только один контакт () в блоке pin LIN Master .
Скорость передачи данных в шине LIN невысокая и составляет приблизительно от 5 до 25 кбит\сек.
Рецессивный уровень
Если на шину данных LIN не будет послана телеграмма или рецессивный бит, то на шину данных подается напряжение, практически равное напряжению аккумуляторной батареи.
Для передачи доминирующего бита по шине данных LIN в передающем блоке управления шина данных замыкается на массу через приемопередатчик (трансивер) — см. фото 2 :
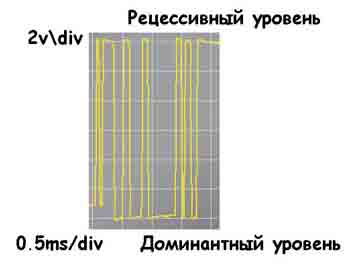
Надежность и стабильность передачи данных обеспечивается установлением определенных допусков в сигналах на рецессивном и доминантном уровнях.
Между блоками Slave и Master постоянно «курсируют» телеграммы определенной формы.
Блок управления LIN Master периодически посылает телеграммы, которые строго разделены на четыре составляющие:
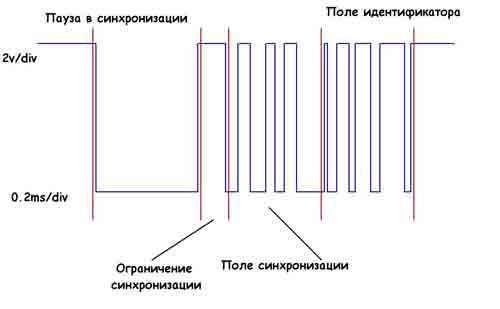
1 — пауза в синхронизации
2 — ограничение синхронизации
3 — поле синхронизации
4 — поле идентификатора
В посланной телеграмме, так называемая «пауза в синхронизации» нужна для того, что бы «сообщить» блокам о том, что посылается телеграмма. Минимальная пауза в синхронизации равняется времени передачи 13 битов. Пауза посылается с доминантным уровнем.
Поле синхронизации требуется для того, что бы все исполнительные блоки могли настроиться или проверить свои настройки перед приемом телеграммы — оно состоит из строго определенной последовательности битов 0101010101.
Читайте также: Шины зимние для легковых автомобилей в красноярске
Видео:Lin-scan (Анализатор ЛИН шины)Скачать

Эмулятор lin шины bmw
Добрый день. Есть ли желающие разобраться в LIN? Задумка слушать команды master устройства в автомобиле, а потом возможно рулить другими slave устройствами. Код буду писать на C в AVR Studio. Возможно у кого-то есть знания по LIN. Поделитесь пожалуйста. Вопросы:
1) С помощью чего объединить Tx, Rx в LIN?
2) Как ловить 13 bit разрыва синхронизации.
Либо предлагаю совместными усилиями сделать железку.
| Электрический кот |
JLCPCB, всего $2 за прототип печатной платы! Цвет — любой!
Зарегистрируйтесь и получите два купона по 5$ каждый:https://jlcpcb.com/cwc
Я делаю это для Калины. Логи тоже есть.
Сначала нужно разобраться как работает железка. Популярный приемопередатчик это TJA1020. И вот непонятно TJA1020 он просыпается после 13 бит в нуле и шлет данные в МК, или эти 13 бит нужно отсекать программно с помощью МК, используя флаг переполнения буфера usart?
Еще есть L9637, пойдет ли она?
Сборка печатных плат от $30 + БЕСПЛАТНАЯ доставка по всему миру + трафарет
| Электрический кот |
Приглашаем 30 ноября всех желающих посетить вебинар о литиевых источниках тока Fanso (EVE). Вы узнаете об особенностях использования литиевых источников питания и о том, как на них влияют режим работы и условия эксплуатации. Мы расскажем, какие параметры важно учитывать при выборе литиевого ХИТ, рассмотрим «подводные камни», с которыми можно столкнуться при неправильном выборе, разберем, как правильно проводить тесты, чтобы убедиться в надежности конечного решения. Вы сможете задать вопросы представителям производителя, которые будут участвовать в вебинаре.
| Вымогатель припоя |
Приглашаем всех желающих 25/11/2021 г. принять участие в вебинаре, посвященном антеннам Molex. Готовые к использованию антенны Molex являются компактными, высокопроизводительными и доступны в различных форм-факторах для всех стандартных антенных протоколов и частот. На вебинаре будет проведен обзор готовых решений и перспектив развития продуктовой линейки. Разработчики смогут получить рекомендации по выбору антенны, работе с документацией и поддержкой, заказу образцов.
| Электрический кот |
Я уже веду работу по подстройке к скорости обмена. Пишу для Atmega 16.
Посмотрел файл от Mishany. Нифига непонятно. Как нарисовать сову называется. Вроде как посылка от мастер устройства выглядит как: 13 бит в нуле- это разрыв синхронизации, потом синхронизация 10 бит, потом 10 бит PID данные, потом 10 бит данные, потом 10 бит контрольная сумма.
Планирую:
1) Вычисление скорости обмена, и ее подстройка.
2) Отсекание «разрыва синхронизации»
3) Прием 10 бит синхронизации и удостовериться что там 0х55
4) Прием данных
5) Вычисление контрольной суммы и сравнение значения с последний байтом посылки.
6) Сравнение поленных данных с табличными данными.
7) Выполнить нужное действие.
А где можно взять симулятор LIN, чтобы проводить эксперименты на столе ? МБ есть какая-то программа?
Последний раз редактировалось Gin87 Ср окт 07, 2015 18:45:29, всего редактировалось 1 раз.

Читайте также: Шина для машины бухучет
| Электрический кот |
Кто сейчас на форуме
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 11
Видео:Как работает LIN шина автомобиля. K-Line L-Line шины данных. Лин шина автомобиля. Lin-bus networkСкачать

Эмулятор lin шины bmw

Видео:Поиск неисправности ШИНЫ LIN BMW F10Скачать

Can-Hacker LIN адаптер для работы с шиной LIN
Дополнительный программно-аппаратный модуль для работы с шиной LIN
Устанавливается в разъемы расширения CAN-Hacker 3

В комплекте:
Адаптер шины LIN, прошивка
Аппаратно адаптер реализован очень просто на базе LIN трансивера TJA2021



Видео:LIN шина - пример работы. LIN bus exampleСкачать

Can-Hacker LIN адаптер для работы с шиной LIN
Дополнительный программно-аппаратный модуль для работы с шиной LIN
Устанавливается в разъемы расширения CAN-Hacker 3
В комплекте:
Адаптер шины LIN, прошивка
Аппаратно адаптер реализован очень просто на базе LIN трансивера TJA2021
Санкт-Петербург, Дальневосточный пр-т, д.20, к. 2 тел. +7-921-980-50-84 Посмотреть на карте.
| Вступайте в нашу группу в контакте, будьте в курсе новостей! |  |
Пишите и читайте отзывы о нас:



Вступайте в наши сообщества:
Видео:Оживление по шине LIN блока кнопок стеклоподъемников от Mercedes Benz W220Скачать

Что такое шина LIN
Шина LIN – это простая последовательная однопроводная шина для автомобильных применений и используется в тех случаях когда применение CAN шины – дорого. По шине LIN управляются различные приводы (корректоры фар, заслонки климатической системы, приводы центрального замка), а так же собирается информация с простых датчиков (датчики дождя, света, температуры).
Для изучения шины LIN Вы можете использовать наш адаптер CAN-Hacker 3.0 с дополнительной опцией LIN анализатора.
А так же интерфейс CAN-Hacker CH-P
Пример системы управления дверью с шиной LIN и без нее:
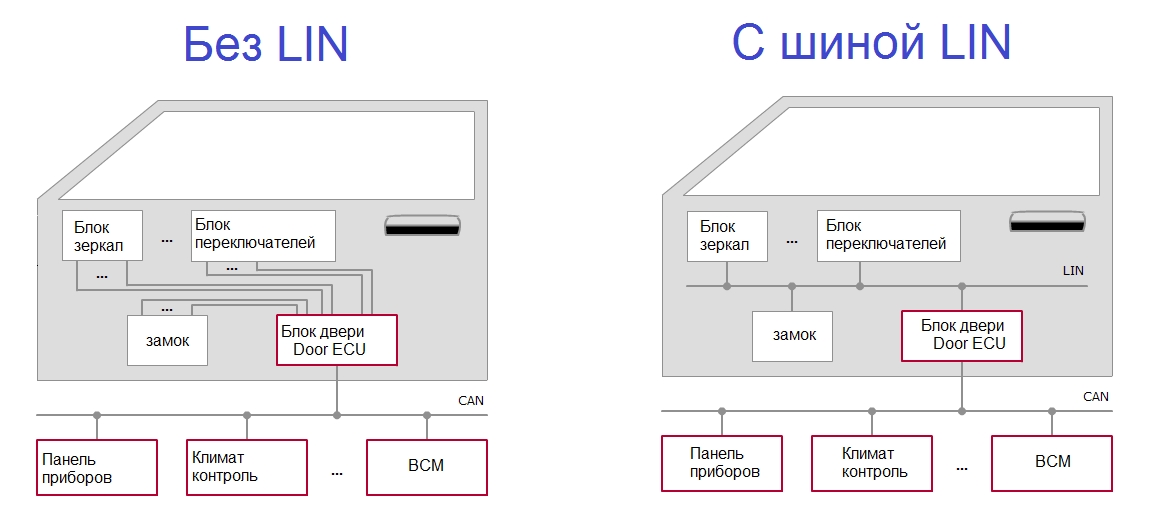
Еще пример, в автомобиле Porsche Macan 2015 г. все привода и датчики климатической системы подключены к шине LIN а сам блок климат контроля связан с автомобилем при помощи CAN шины.
Дешевизна LIN обусловлена тем что реализация протокола LIN полностью программная и строится на базе обычного UART (родственник RS232, COM порт). Так же LIN не требует применения точных времязадающих цепей – кварцевых резонаторов и генераторов. Поэтому можно применять дешевые микроконтроллеры.
Скорость передачи данных
Скорость передачи данных на шине LIN стандартная для устройств построенных на базе UART: 2400; 9600; 10400; 19200; 20000 Бод. Это немного но достаточно для передачи данных от датчиков и для управления медленными механизмами.
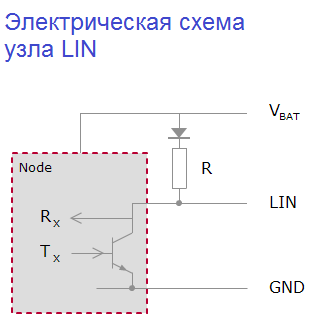
Электрическая реализация LIN
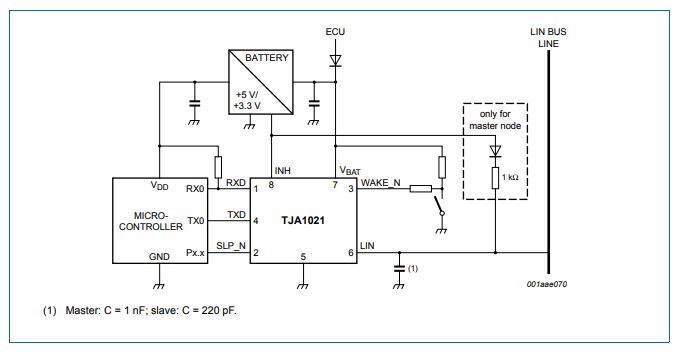
Электрически интерфейс LIN реализован так же просто. В каждом узле линия шины подтянута к шине питания +12V. Передача осуществляется опусканием уровня шины до уровня массы GND. Микроконтроллер подключается к шине LIN при помощи специальной микросхемы Трансивера, например TJA1021
Подключение LIN трансивера к микроконтроллеру
Архитектура сети LIN
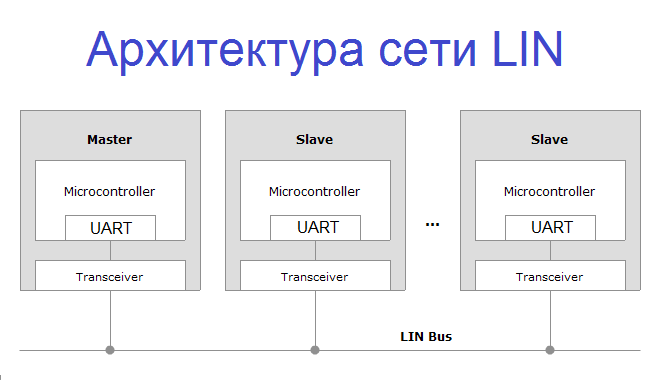
Особенностью шины LIN является то, что в сети присутствует два вида узлов: Master и Slave, Master – ведущий, Slave – подчиненный.
Master может опрашивать Slave о его состоянии, будить его, отправлять ему команды. Обмен информации на шине LIN происходит в формате обмена пакетами, и на первый взгляд может показаться что механизм идентичен шине CAN, это не так. Объясняем почему:
Структура LIN пакета выглядит так:
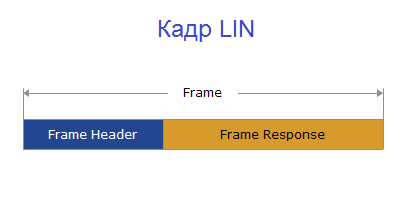
Frame – Header – заголовок кадра, который отправляется в шину Мастером. Включает в себя ID кадра
Frame – Response – данные которые отправляет Slave в ответ на запрос Master -а.
Уловите разницу – в шине CAN все узлы передают и ID кадра и данные. В шине LIN – заголовок пакета это задача Мастер-узла.
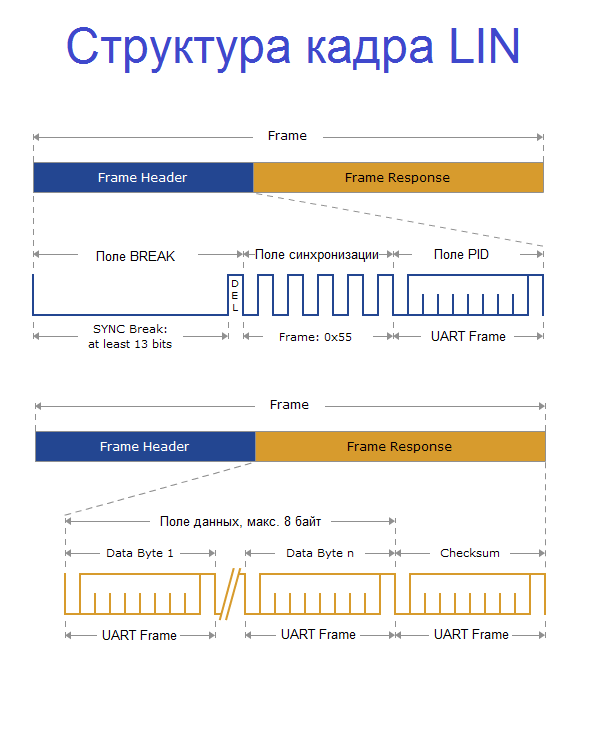
Поле Frame-Header состоит из полей:
BREAK – Это сигнал шине о том что мастер сейчас будет говорить
Поле синхронизации – это просто байт = 0x55. При его передаче приемники подстраивают свою скорость.
PID – это поле защищенного идентификатора. В дальнейшем будем писать просто – идентификатор.
Идентификатор может принимать значения от 0 до 59 (0x3B в HEX) для пользовательских пакетов. Так же возможно использование специальных служебных пакетов с ID 0x3C, 0x3D, 0x3E и 0x3F. Защищенность идентификатора заключена в следующем:

В структуре байта ID мы видим биты собственно самого идентификатора с ID0 по ID5, а затем идут два контрольных бита P0 и P1, которые рассчитываются так:
P0 = ID0 ⊕ ID1 ⊕ ID2 ⊕ ID4
P1 = ¬ (ID1 ⊕ ID3 ⊕ ID4 ⊕ ID5)
Если в PID контрольные биты рассчитаны неверно то пакет не будет обработан принимающей стороной.
В случае если мы будем эмулировать работу какого либо узла Master, предварительно изучив отправляемые им данные при помощи LIN сниффера, то нам не придется задумываться о расчете контрольных битов ID, поскольку в пакетах которые мы видим сниффером все уже посчитано до нас.
После того как Slave принял Header мастера он отвечает полем Frame Response который состоит из байтов данных в количестве от 1 до 8 и байта контрольной суммы.
Контрольная сумма (CRC) считается как инвертированная сумма всех байтов данных с переносом либо сумма всех байтов данных + значение защищенного ID . В первом случае CRC называется классической, во втором – расширенной. Вариант подсчета контрольной суммы определяется версией стандарта шины LIN. В версиях 1.xx применяется классический алгоритм, в версиях 2.xx применяется расширенный.
Обратите внимание на отсутствие поля DLC отвечающего за количество байтов данных как в CAN шине. В шине LIN количество байтов данных определяется на этапе написания ПО контроллера. Поэтому процесс обмена на шине LIN сложнее анализировать при помощи сниффера – приходится вводить специальный алгоритм разделения пакетов, который угадывает сколько байтов данных было в принятом пакете.
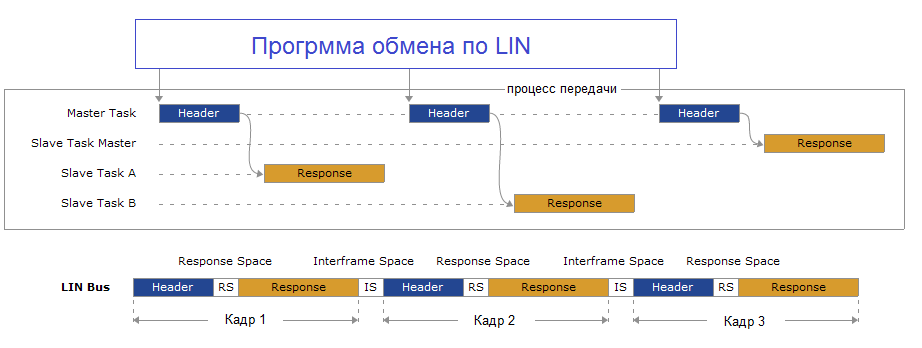
На этой схеме мы видим как один Мастер общается с двумя узлами Slave. Обратите внимание на третий кадр, в нем заголовок Header и тело пакета Response передает Мастер – это важный момент, такие кадры используются для диагностики и конфигурирования Slave узлов.
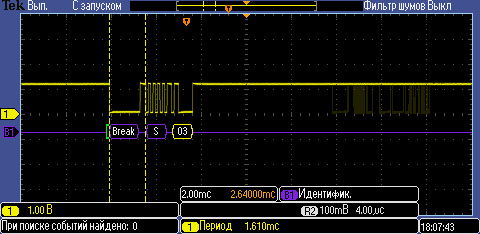
На осциллограмме обмен одного Master и одного Slave выглядит так:
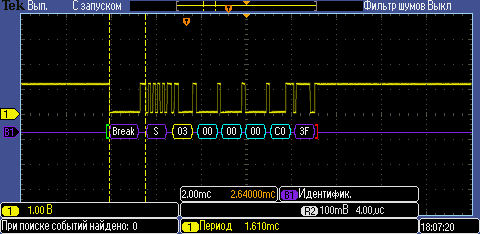
Здесь мы видим запрос мастера состоящий из полей Break – S – затем следует ответ узла Slave состоящий из четырех байт и контрольной суммы равной 0x3F.
Если мы отключим узел Slave от шины LIN, то увидим уже такую осциллограмму:
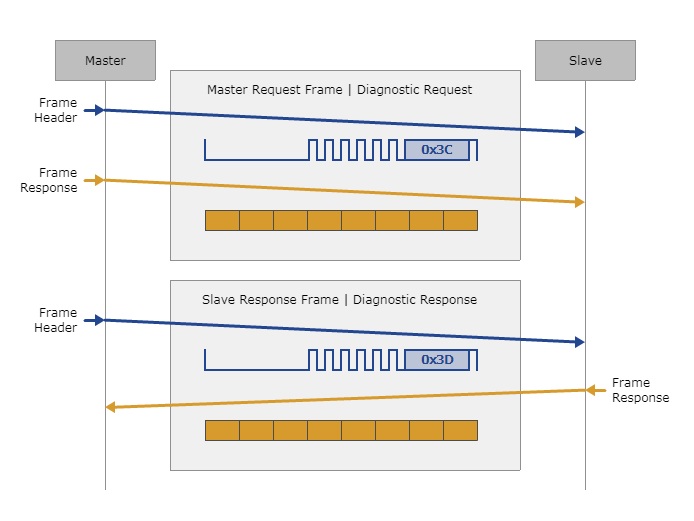
Так же в протоколе шины LIN предусмотрены и специальные служебные пакеты служащие для диагностики шины, пробуждения устройств и других функций. В этом случае Master может передавать как Frame Header так и Frame Response последовательно, тогда пакет Master -а может иметь такой вид:
ID=0x3C DATA : FF FF FF FF FF FF FF FF
Обмен диагностическими сообщениями на шине LIN выглядит так :
При помощи длинных пакетов Master может конфигурировать и программировать узлы Slave. Если для программирования или конфигурирования узла LIN необходимо более 8 байт, то поток данных сегментируется и пересылается частями. Механика передачи данных определяется специальным транспортным протоколом работающим поверх физики шины LIN, о нем мы напишем в следующих статьях.
Видео пример работы с шиной LIN и адаптером CAN-Hacker 3.2
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле
📹 Видео
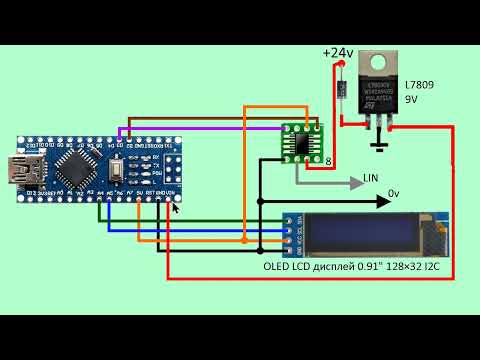
Логический LIN пробник, цифровой тестер лин, к лайн шины автомобиля. На Ардуино, OLED I2C, TJA 1020Скачать

MCP2515, контроллер CAN шины с интерфейсом SPIСкачать
CAN шина👏 Как это работаетСкачать
Как управлять автомобилем через CAN-шину?Скачать
Кан шина, что это? Поймет школьник! принцип работыСкачать
Запуск привода стеклоподъемника по шине LIN. Control a window lift via LIN bus and CAN busСкачать
АЗЫ ДИАГНОСТИКИ. Шины передачи данных. Часть 3. Шина LinСкачать
Как проверить CAN шину Используем симулятор ElectudeСкачать
Обход can шины на электро колонке от BMW E38Скачать
Эмулятор активных жалюзи LIN-CHECKER AGS Nissan Subaru Mazda Dodge Honda FORDСкачать
Подробно про CAN шинуСкачать
Блок управления, генератор, CAN или LIN шина либо АКБ? P0401, P0523, U1113, U1132, U0106 (Видео 90)Скачать
Экспресс диагностика CAN шины на автомобиле. №21Скачать
Диагностика генератора "cтарт-стоп" по шине LINСкачать
LIN-BUS Анализатор бомбер ResponseСкачать