

Вся докуменация, более 10 гигабайт, доступна в нашей библиотеке.

10″ Панель оператора MT8100iE
- Инкрементальные энкодеры KUBLER
- Миниатюрные энкодеры 2400 (Вал), 2420 (Полый вал)
- Миниатюрные, магнитные энкодеры 2430 (Вал), 2440 (Полый вал)
- Компактные энкодеры 3610 (Вал), 3620 (Полый вал)
- Экономичные энкодеры 3700 (Вал), 3720 (Полый вал)
- Энкодеры серии Sendix incremental 5000 (Вал), 5020 (Полый вал)
- Энкодеры серии Sendix incremental 5006 нержавеющая сталь
- Универсальные энкодеры 580X (Вал), 582X (Полый вал)
- Экнономичные энкодеры 5810 (Вал)
- Энкодеры с большим полым валом 5821
- Энкодеры серии Niro 5826 (Полый вал) нержавеющая сталь
- Магнитные энкодеры LIMES RI20 LI20
- Энкодеры по стандарту ATEX 7030 Вал/Полый вал
- Энкодеры для тяжелых условий модель 9000 и версия 9000 (Niro) нержавеющая сталь
- Энкодеры с большим полым валом A020
- Энкодеры для тяжелых условий с большим полым валом A02H
- Документация Kubler
- Энкодер 1024 с полым валом
- Энкодер: устройство и примеры работы
- Что такое энкодер?
- Принципы работы и устройство энкодеров
- Подключение энкодера
- Сигналы и выходы инкрементального энкодера
- Монтаж энкодеров
- Подключение и работа энкодеров. Реальные примеры.
- Измерение скорости полотна
- Положение деталей на конвейере
- Перемещение детали
- Перемещение упора
- Вычисление точной координаты
- Системы дозирования
- Защита двигателя
- Запоминающие энкодеры
- Резольвер
- Тахогенератор
- Производители энкодеров
- Скачать
Инкрементальные энкодеры KUBLER
Миниатюрные энкодеры 2400 (Вал), 2420 (Полый вал)


 Ø 4 мм (Вал), Ø 6 мм (Полый вал) Соответствует стандарту железных дорог Германии EN 50121
Ø 4 мм (Вал), Ø 6 мм (Полый вал) Соответствует стандарту железных дорог Германии EN 50121
Миниатюрные, магнитные энкодеры 2430 (Вал), 2440 (Полый вал)

Компактные энкодеры 3610 (Вал), 3620 (Полый вал)
 Ø 36,5×35 или Ø 36,5×31,5 мм 12.000 об/мин (Вал), 6.000 об/мин (Полый вал)
Ø 36,5×35 или Ø 36,5×31,5 мм 12.000 об/мин (Вал), 6.000 об/мин (Полый вал)
Экономичные энкодеры 3700 (Вал), 3720 (Полый вал)

 сертификат EX для работы в опасных зонах 2/22
сертификат EX для работы в опасных зонах 2/22
Энкодеры серии Sendix incremental 5000 (Вал), 5020 (Полый вал)

 RS 422, Push pull 7272 или Push-pull сертификат EX для работы в опасных зонах 2/22
RS 422, Push pull 7272 или Push-pull сертификат EX для работы в опасных зонах 2/22
Изолированные входн.сигн.
Sea-water resistant
Энкодеры серии Sendix incremental 5006 нержавеющая сталь
 RS 422, Push pull 7272 или Push-pull сертификат EX для работы в опасных зонах 2/22
RS 422, Push pull 7272 или Push-pull сертификат EX для работы в опасных зонах 2/22
Универсальные энкодеры 580X (Вал), 582X (Полый вал)
 макс. 5000 имп/об (Опции 36000 имп/об) сертификат EX для работы в опасных зонах 2/22 Тип 5800/5820: Стандартный
макс. 5000 имп/об (Опции 36000 имп/об) сертификат EX для работы в опасных зонах 2/22 Тип 5800/5820: Стандартный
Тип 5803/5823: Высокотемпературный до 110°C
Тип 5804/5824: Синусоидальные Выходное сигналы
Тип 5805: С высоким разрешением до 36000 имп/об
Тип 5826: Корпус из нержавеющей стали
Экнономичные энкодеры 5810 (Вал)
 сертификат EX для работы в опасных зонах 2/22
сертификат EX для работы в опасных зонах 2/22
Энкодеры с большим полым валом 5821
 сертификат EX для работы в опасных зонах 2/22
сертификат EX для работы в опасных зонах 2/22
Энкодеры серии Niro 5826 (Полый вал) нержавеющая сталь
 сертификат EX для работы в опасных зонах 2/22
сертификат EX для работы в опасных зонах 2/22
Магнитные энкодеры LIMES RI20 LI20

Энкодеры по стандарту ATEX 7030 Вал/Полый вал

Энкодеры для тяжелых условий модель 9000 и версия 9000 (Niro) нержавеющая сталь
 сертификат EX для работы в опасных зонах 2/22
сертификат EX для работы в опасных зонах 2/22
Энкодеры с большим полым валом A020
 сертификат EX для работы в опасных зонах 2/22
сертификат EX для работы в опасных зонах 2/22
Энкодеры для тяжелых условий с большим полым валом A02H
 сертификат EX для работы в опасных зонах 2/22
сертификат EX для работы в опасных зонах 2/22
Изолированные входн.сигн.
Документация Kubler
Информация размещенная на сайте носит исключительно информационно-справочный характер и ни при каких условиях не является публичной офертой.
Энкодер 1024 с полым валом

 Каталог датчиков угла поворота — инкрементальных энкодеров с разнообразными диаметрами вала, габаритными размерами и выходными сигналами. Представлены энкодеры IFM Electronic, Datalogic, Pepperl+Fuchs, Turck, SICK со сквозным и с полноразмерным валом на различное число импульсов на оборот, а так же программируемые с настройкой разрешения в широком диапазоне.
Каталог датчиков угла поворота — инкрементальных энкодеров с разнообразными диаметрами вала, габаритными размерами и выходными сигналами. Представлены энкодеры IFM Electronic, Datalogic, Pepperl+Fuchs, Turck, SICK со сквозным и с полноразмерным валом на различное число импульсов на оборот, а так же программируемые с настройкой разрешения в широком диапазоне.  Диаметр корпуса: Ø58 мм. Тип вала: полый, Ø12 мм. Разрешение: 1. 10000 имп/об, программируемое. Выходной сигнал: HTL/TTL, программируемый. Питание: 4,75. 30 V DC. Максимальная скорость вращения: 12000 об/мин. Программирование: кнопки на корпусе, интерфейс IO-Link. Температурный диапазон эксплуатации: -40. +85 °C. Степень пылевлагозащиты: IP 67 корпус, IP 64 вал. Материал корпуса: нержавеющая сталь, алюминий. Подключение: разъем М12 8 pin.
Диаметр корпуса: Ø58 мм. Тип вала: полый, Ø12 мм. Разрешение: 1. 10000 имп/об, программируемое. Выходной сигнал: HTL/TTL, программируемый. Питание: 4,75. 30 V DC. Максимальная скорость вращения: 12000 об/мин. Программирование: кнопки на корпусе, интерфейс IO-Link. Температурный диапазон эксплуатации: -40. +85 °C. Степень пылевлагозащиты: IP 67 корпус, IP 64 вал. Материал корпуса: нержавеющая сталь, алюминий. Подключение: разъем М12 8 pin.  Диаметр корпуса: Ø58 мм. Тип вала: полноразмерный, Ø10 мм. Разрешение: 1. 10000 имп/об, программируемое. Выходной сигнал: HTL/TTL, программируемый. Питание: 4,75. 30 V DC. Максимальная скорость вращения: 12000 об/мин. Программирование: кнопки на корпусе, интерфейс IO-Link. Температурный диапазон эксплуатации: -40. +85 °C. Степень пылевлагозащиты: IP 67 корпус, IP 64 вал. Материал корпуса: нержавеющая сталь, алюминий. Подключение: разъем М12 8 pin.
Диаметр корпуса: Ø58 мм. Тип вала: полноразмерный, Ø10 мм. Разрешение: 1. 10000 имп/об, программируемое. Выходной сигнал: HTL/TTL, программируемый. Питание: 4,75. 30 V DC. Максимальная скорость вращения: 12000 об/мин. Программирование: кнопки на корпусе, интерфейс IO-Link. Температурный диапазон эксплуатации: -40. +85 °C. Степень пылевлагозащиты: IP 67 корпус, IP 64 вал. Материал корпуса: нержавеющая сталь, алюминий. Подключение: разъем М12 8 pin.  Диаметр корпуса: Ø58 мм. Тип вала: полноразмерный, Ø6 мм. Разрешение: 1. 10000 имп/об, программируемое. Выходной сигнал: HTL/TTL, программируемый. Питание: 4,75. 30 V DC. Максимальная скорость вращения: 12000 об/мин. Программирование: кнопки на корпусе, интерфейс IO-Link. Температурный диапазон эксплуатации: -40. +85 °C. Степень пылевлагозащиты: IP 67 корпус, IP 64 вал. Материал корпуса: нержавеющая сталь, алюминий. Подключение: разъем М12 8 pin.
Диаметр корпуса: Ø58 мм. Тип вала: полноразмерный, Ø6 мм. Разрешение: 1. 10000 имп/об, программируемое. Выходной сигнал: HTL/TTL, программируемый. Питание: 4,75. 30 V DC. Максимальная скорость вращения: 12000 об/мин. Программирование: кнопки на корпусе, интерфейс IO-Link. Температурный диапазон эксплуатации: -40. +85 °C. Степень пылевлагозащиты: IP 67 корпус, IP 64 вал. Материал корпуса: нержавеющая сталь, алюминий. Подключение: разъем М12 8 pin.  Диаметр корпуса: Ø58 мм. Тип вала: полноразмерный, Ø10 мм. Разрешение: 1024 имп/об. Выходной сигнал: push-pull. Питание: 10. 30 V DC. Максимальная скорость вращения: 10000 об/мин. Температурный диапазон эксплуатации: -20. +70 °C. Степень пылевлагозащиты: IP 65. Материал корпуса: алюминий, сплав цинка. Подключение: кабель, 2 м.
Диаметр корпуса: Ø58 мм. Тип вала: полноразмерный, Ø10 мм. Разрешение: 1024 имп/об. Выходной сигнал: push-pull. Питание: 10. 30 V DC. Максимальная скорость вращения: 10000 об/мин. Температурный диапазон эксплуатации: -20. +70 °C. Степень пылевлагозащиты: IP 65. Материал корпуса: алюминий, сплав цинка. Подключение: кабель, 2 м.  Диаметр корпуса: Ø58 мм. Тип вала: полый, Ø12 мм. Разрешение: 1250 имп/об. Выходной сигнал: RS 422. Питание: 10. 30 V DC. Максимальная скорость вращения: 5000 об/мин. Температурный диапазон эксплуатации: -20. +60 °C. Степень пылевлагозащиты: IP 54. Материал корпуса: алюминий. Подключение: кабель, 1 м.
Диаметр корпуса: Ø58 мм. Тип вала: полый, Ø12 мм. Разрешение: 1250 имп/об. Выходной сигнал: RS 422. Питание: 10. 30 V DC. Максимальная скорость вращения: 5000 об/мин. Температурный диапазон эксплуатации: -20. +60 °C. Степень пылевлагозащиты: IP 54. Материал корпуса: алюминий. Подключение: кабель, 1 м.  Диаметр корпуса: Ø58 мм. Тип вала: полый, Ø12 мм. Разрешение: 100 имп/об. Выходной сигнал: RS 422. Питание: 5 V DC. Максимальная скорость вращения: 6000 об/мин. Температурный диапазон эксплуатации: -20. +60 °C. Степень пылевлагозащиты: IP 54. Материал корпуса: алюминий. Подключение: кабель, 1 м. Источник
Диаметр корпуса: Ø58 мм. Тип вала: полый, Ø12 мм. Разрешение: 100 имп/об. Выходной сигнал: RS 422. Питание: 5 V DC. Максимальная скорость вращения: 6000 об/мин. Температурный диапазон эксплуатации: -20. +60 °C. Степень пылевлагозащиты: IP 54. Материал корпуса: алюминий. Подключение: кабель, 1 м. Источник
Энкодер: устройство и примеры работы
Нередко статьи у меня на блоге тесно связаны с промышленным оборудованием. На этот раз я подробно рассматриваю энкодер – очень важное устройство, без которого не обходится ни одна солидная производственная линия. А почему энкодер столь важен, будет понятно из моей статьи. Разберём подключение энкодера, его работу, устройство и монтаж. Как обычно в таких статьях, будут реальные примеры работы энкодеров в различных узлах оборудования. И, конечно же, будет много фотографий, сделанных мною лично.
Что такое энкодер?
- скорость вращения,
- расстояние (длину),
- направление вращения,
- угловое положение по отношению к нулевой метке.
Энкодер является самым распространенным «измерительным инструментом» в современном промышленном оборудовании. Фактически энкодер является датчиком обратной связи, на выходе которого цифровой сигнал меняется в зависимости от его вращения или от угла его поворота. Этот сигнал обрабатывается в счетчике или контроллере, который выдает команды на устройство индикации или привод.

Этикетка инкрементного энкодера Sick, установленного на валу двигателя постоянного тока. Основной параметр – 1024 импульса на оборот
Энкодеру найдено множество применений, учитывая возможности последующей обработки его сигнала. Например – измерение погонной длины какого-либо материала, измерение угла открытия/закрытия задвижки, точное позиционирование деталей при перемещении и обработке. Конкретные примеры будут ниже.
Энкодеры, о которых идёт речь в статье, в некоторых источниках называются датчиками углового перемещения, датчиками угла поворота, и даже “N-кодером”.
А вообще энкодер – это любое устройство, которое преобразовывает или декодирует какой-то сигнал или информацию.
Принципы работы и устройство энкодеров
Существует два вида энкодеров по конструкции и виду выходного сигнала – инкрементальный (инкрементный) и абсолютный.
Инкрементальный энкодер устроен проще сравнению с абсолютным, и используется в большинстве случаев. Такой энкодер можно представить как диск с прорезями, который просвечивается оптическим датчиком. При вращении этого диска датчик будет активироваться или деактивироваться зависимости от своего положения над прорезью. В результате на выходе энкодера формируется последовательность дискретных импульсов, частота которых зависит от разрешения энкодера и его частоты вращения.
Например, если энкодер закреплен на валу асинхронного двигателя, который вращается с частотой 1500 оборотов в минуту, то при разрешении энкодера 1000 импульсов на оборот частота выходных импульсов будет равна 25 кГц.
Разрешение и максимальная частота вращения обратнозависимы – ведь не может же частота выходных импульсов исчисляться гигагерцами. Обычно выходная частота ограничена значением около 500 кГц. Да и не всякий контроллер “скушает” такую частоту. Делаем вывод: энкодер с разрешением 1000 имп/оборот (наиболее распространенный) не может крутиться с частотой выше 500 Гц или 30000 об/мин. Но такие скорости в механике я лично не встречал. Делаем второй вывод: высокое разрешение не всегда хорошо.
Пример, поясняющий работу энкодера:

Конструкция, поясняющая работу оптического энкодера
На фото – не энкодер, но данная конструкция в первом приближении прекрасно иллюстрирует работу и устройство инкрементального оптического энкодера. Про щелевой оптический датчик я писал в статье про оптические датчики, там подробнее.
Бич подобных конструкций – при механической поломке, связанной со смещением диска (или другого активатора), датчик легко ломается… В энкодере такого не может быть – там всё надёжно закреплено и защищено.
Основной минус инкрементального энкодера – необходимость непрерывной обработки его выходного сигнала. Кроме того, чтобы узнать положение инкрементального энкодера после подачи на него питания, необходимо провести инициализацию для поиска нуль-метки (что это такое – расскажу позже) либо для поиска нулевого положения механизма.
Абсолютный энкодер имеет более сложное устройство, но он позволяет определить угол поворота в любой момент времени, даже в неподвижном состоянии механизма сразу после включения питания. Говоря простыми словами, выходной сигнал у него – это параллельный код (например, 8-разрядный, имеющий 256 значений), который соответствует углу поворота. Соответствующую конфигурацию имеют и прорези в диске энкодера.
Абсолютные энкодеры работают в сложном оборудовании – там, где в любой момент времени (в том числе, в момент подачи питания) нужно знать точное положение объекта. Но сейчас, с появлением дешевых контроллеров с энергонезависимой памятью, в 99% используются инкрементальные энкодеры. Тем более учитывая, что их цена в несколько раз ниже, чем у абсолютных. Да и обрабатывать последовательные импульсы гораздо проще, чем параллельный код.
Использовать абсолютный энкодер для определения скорости вращения – всё равно, что использовать мощный настольный компьютер только для прослушивания музыки в ВК.
Бывают энкодеры не оптического принципа работы. Но я про них ничего рассказывать не буду, поскольку не имел с ними дела..
Подключение энкодера
Энкодер никогда не работает сам по себе. Он всегда подключается к устройству обработки сигналов, с помощью которого можно переварить и проанализировать импульсы на его выходах. Подключить энкодер легко – ведь это фактически датчик с транзисторными выходами. В простейшем случае, выход энкодера можно подключить ко входу счетчика, и запрограммировать его на измерение скорости или длины.
Но чаще всего выходные сигналы энкодера обрабатываются в контроллере. А далее путем расчетов можно получить информацию о скорости, направлении вращения, ускорении, положении объекта.
Энкодеры подключают не только к контроллеру. Он также может подключаться к преобразователю частоты, питающему электродвигатель. Таким образом , появляется возможность точного позиционирования, а также поддержания нужной скорости и момента вращения двигателя без использования контроллера. Это называется векторным управлением.
Сигналы и выходы инкрементального энкодера
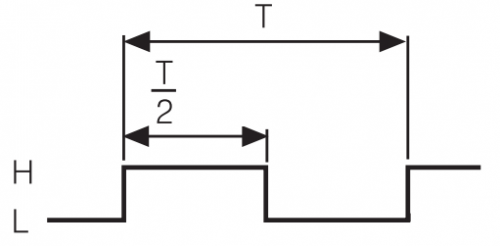
Импульсы на выходе энкодера – один канал
Период Т – величина, обратная частоте, а про частоту мы говорили выше. Уровень “Н” – это напряжение, почти равное напряжению питания (обычно 5, 12, или 24 В). Уровень “L” – около нуля.
Само собой, реальные импульсы не столь идеальны – у них может гулять скважность и будут завалены фронты.
Что может рассказать нам такой энкодер? Только о скорости и погонных метрах. Например, его можно применять для определения частоты вращения двигателя, или длины материала после нажатия кнопки “Сброс”. Неплохо, но хочется большего!
Если будет два выхода, импульсы на которых (оптическим способом) сдвинуты на четверть периода, мы сможем узнать направление вращения:
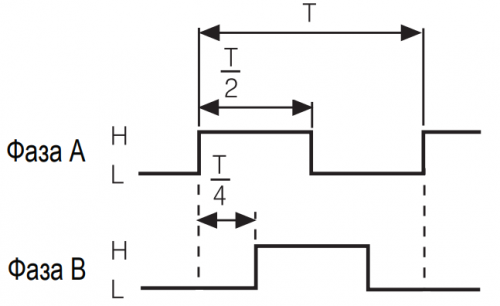
Импульсы каналов А и В с фазовым сдвигом
Такие выходы со сдвигом фаз на четверть периода называются квадратурными каналами. Этот приём широко применяется в радиотехнике и электронике не только для определения направления вращения, но и для определения знака рассогласования частот (больше или меньше опорной частоты?).
Если сдвиг фаз положительный (фаза В отстает), можно условиться о прямом вращении. Если отрицательный (фаза В опережает фазу А на четверть), значит, вращение в обратном направлении. Два этих сигнала с одной частотой и фазой ±90° подаются на триггер, выход которого однозначно указывает о направлении вращения.
Ничего это не напоминает? В энкодере – двухфазная система, со сдвигом фаз 90°, в электрощите – трехфазная система, со сдвигом фаз 120°. Для смены направления вращения трехфазного двигателя достаточно поменять местами любые две фазы.
Со скоростью, расстоянием и направлением разобрались, а что делать, если нужно узнать угол поворота? Для этого вводится сигнал “Z” (Zero) – опорный импульс, который также называют нуль-меткой или референсной меткой:
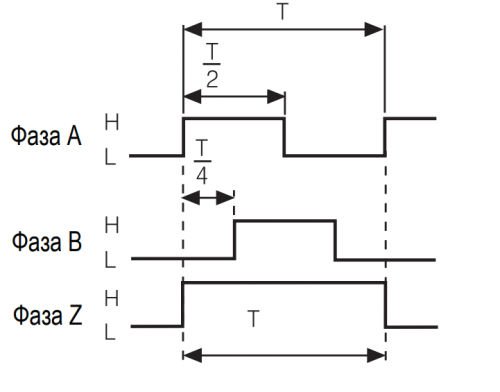
Выходы энкодера А, В с нулевой меткой Z
Импульс “Z” имеет длительность Т (бывает и другая длительность – T/2, или 2Т) и проскакивает 1 раз за оборот вала энкодера. Иными словами, длительность нулевой метки может быть в тысячи раз короче периода вращения вала энкодера.
В современных датчиках каждая фаза (канал) обычно имеет ещё один, противофазный выход.
С теорией заканчиваем, плавно переходим к практике.
Монтаж энкодеров
По монтажу сразу скажу главное – вал энкодера по отношению к валу механизма должен быть надежно зафиксирован! Обычно это делается при помощи шестигранных винтов.
Бывали случаи, когда из-за проскальзывания самодельных и даже штатных муфт глючили производственные линии, и мы долго не могли найти причину – ведь всё остается исправным!
Монтироваться энкодер может и на валу двигателя, и на валу любого другого механизма – это не принципиально, и зависит лишь от конструкции и требований к точности выполнения поставленной задачи.
Вал энкодера никогда не будет соосным с вращающимся валом (вспомните, для чего нужен карданный вал). Поэтому используются специальные заводские переходные муфты, нужно надежно их крепить и периодически проверять качество монтажа.
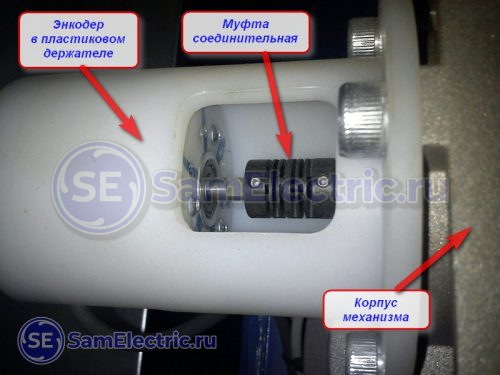
Энкодер механически соединен с приводом через соединительную муфту для компенсации несоосности
Корпус любого энкодера всегда неподвижен. Вращается только его внутренняя подвижная часть.
Существуют энкодеры с полым валом, которые надеваются непосредственно на измеряемый вал и там фиксируются. Там даже нет такого понятия, как несоосность. Их гораздо проще монтировать, и они надежнее в эксплуатации. Чтобы энкодер при этом не прокручивался, используется лишь металлический поводок. На фото ниже показан энкодер с полым валом (обозначен В21.1), надетый на вал редуктора:

Энкодер с полым валом, надет на вал редуктора
Обратите внимание – корпус энкодера целиком и полностью держится на валу редуктора. От проворачивания его держит металлический поводок. При работе энкодер обычно немного покачивается по овальной траектории, это нормально, поскольку идеал существует только на картинках в даташитах и учебниках.
Бывают сквозные полые валы, когда ось механизма проходит через энкодер насквозь.
Подключение и работа энкодеров. Реальные примеры.
Ниже я рассмотрю несколько примеров использования энкодеров в реальном оборудовании.
Измерение скорости полотна
В данном примере, инкрементальный энкодер ELCO используется для измерения скорости бумажного полотна при производстве бумаги. Энкодер закреплен на бумаговедущем валу через муфту, скорость вращения которого однозначно говорит о скорости бумаги.
При помощи системы «энкодер+контроллер» можно вычислить мгновенную скорость, а также погонную длину произведенной продукции.

Энкодер работает на бумаговедущем валу

Энкодер ELCO работает на бумаговедущем валу. Корпус энкодера закреплен жестко, стыковка валов – через компенсирующую муфту
Минус такой установки – при механической поломке вала (а это бывало уже не раз, изнашиваются подшипники) ломается либо муфта, либо сам энкодер.
Положение деталей на конвейере
В этом случае энкодер насажен на вал двигателя, подключенного через преобразователь частоты. Двигатель через редуктор передает движение на конвейер, по которому движутся заготовки деталей.

Положение детали на конвейере, позиционирование при помощи энкодера на двигателе
С помощью энкодера и оптических датчиков, фиксирующих просвет между образцами продукции, контроллер с большой точность может управлять обработкой деталей.
При этом направление знать не обязательно (оно всегда одно), и могут применяться энкодеры без ноль-метки:

Энкодер для определения только скорости вращения
По моему мнению, насаживание энкодера на вал двигателя – не очень хорошая идея в смысле того, что энкодер крутится на больших оборотах (до 3000 об/мин). Кроме повышенного механического износа, необходимо предусмотреть обработку сигналов со сравнительно высокой скоростью. Но сегодня, с развитием промышленной электроники, это не проблема.
Крепление энкодера на валу двигателя позволяет очень точно контролировать скорость привода. С появлением высокооборотистых энкодеров многие производители наладили выпуск двигателей со встроенным энкодером.
Если интересно применение ПЧ в конвейерах, вот моя статья на Дзене, где я подробно рассматриваю схему включения ПЧ для конвейера.
Ещё пример точного позиционирования при помощи энкодера для двигателя:

Энкодер – работа на валу двигателя со стороны крыльчатки
В этом случае двигатель приводит в действие цепную передачу лифта, подающего заготовку на обработку. Точность позиционирования лифта – порядка 1 мм, длина пути – более 2 м.
Перемещение детали
Ещё большую точность, чем в предыдущем случае, можно получить, если вал энкодера закрепить на ходовой винт с резьбой.

На фото сверху вниз – направляющая, ходовой винт, кабель к энкодеру
Если на ходовой винт закрепить гайку, которая механически скреплена с перемещаемой деталью (в реальном примере это – металлическая заготовка, которая рубится или гнётся по нужному размеру), то с помощью энкодера можно до долей миллиметра узнать её положение. Точность вычисления будет зависеть от шага резьбы и разрешающей способности энкодера.
Минус такого решения – при большой скорости возможен «промах», и нужно либо уменьшать скорость при приближении к цели, либо постоянно двигаться на низкой скорости. Кроме того, механика тоже должна быть точной, чтобы исключить любые люфты и перекосы.
Перемещение упора
Задача стоит в принципе такая же, как и в предыдущем случае. Но тут другой принцип перемещения – за счет зубчатой передачи:

Зубчатая передача перемещения каретки
Плюс данной реализации в том, что энкодер насажен непосредственно на зубчатое колесо, которое осуществляет передачу вращения. При большом разрешении энкодера и отсутствии механических люфтов можно добиться очень высокой точности позиционирования.
Использование энкодера совместно с винтовой и зубчатой передачей позволяет достичь высокой точности обработки деталей в станках с ЧПУ.
Вычисление точной координаты
В производстве полиграфической продукции иногда нужно нанести клей (или краску) в точное место. Когда печатная продукция (например, коробки или конверты) движутся по ленточному конвейеру, при помощи оптического датчика определяется начало коробки, затем контроллер при помощи энкодера вычисляет нужную координату, и включает подачу клея.

Вычисление точной координаты при помощи измерительного колеса
Формируется клеевая дорожка нужной длины, затем клей выключается. Далее коробка подается на фальцовочный узел, где складывается и склеивается. При этом скорость работы линии может достигать до 300 коробок в минуту.
Системы дозирования
Для точного открытия заслонки в системе дозирования жидкостей служит система, состоящая из двигателя с редуктором, на вал которого с одной стороны закреплена задвижка, с другой – энкодер.

Поворот на определенный угол при помощи энкодера
Поворот вала редуктора на угол не более 180° ограничен индуктивными датчиками приближения, а точное положение определяется по сигналу от энкодера. В исходном состоянии задвижка закрыта, и датчик минимального положения активен. Это состояние принимается за ноль. Далее включается двигатель, и вал поворачивается. Точный угол поворота пропорционален количеству импульсов от энкодера обратной связи. В данном случае энкодер не делает полный оборот, его движение ограничено датчиками.
Датчики активируются кулачками, которые закреплены (и могут корректироваться шаловливыми ручками)) на том же валу, что и энкодер.
При выключении питания положение энкодера (а значит, и задвижки) запоминается в памяти контроллера. В случае необходимости оператор может провести инициализацию (установку нулевого и максимального положения) за счет индуктивных датчиков. Опорная “Z” – метка при этом не используется.
Защита двигателя
Даже при перегрузке двигателя его скорость понижается, скольжение есть всегда, даже на холостом ходу. Но изменение тока при этом ничтожно. Особенно (например), если двигатель работает на застрявшую продукцию через редуктор.
Поэтому, очень удобно использовать энкодер, закрепленный на валу двигателя, для определения повышенного скольжения. А значит – перегрузки двигателя.
У меня на Дзене есть статья, как энкодер защищает двигатель от перегрузки, там тема раскрыта подробнее.

Энкодер, механическая поломка из-за смещения двигателя
Энкодер перестал выдавать импульсы (перегрузки, правда, не было), и тут же контроллер выдал сообщение:
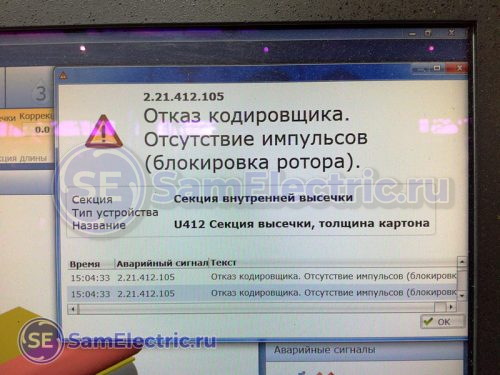
Сообщение на экране оператора о поломке энкодера
Запоминающие энкодеры
Энкодеры умнеют на глазах. В американской линии довелось иметь дело с серводвигателем, в состав которого входит энкодер с памятью.

Энкодер в составе серводвигателя с памятью
Энкодер не простой – у него в памяти зашиты параметры серводвигателя (их более сотни), которые он каждый раз при включении питания передает к центральный контроллер. Из-за заводского брака энкодер был плохо закреплён, и начал тереться о корпус двигателя, что привело к нарушению синфазности вращения двигателя и энкодера. Американцы дистанционно заново программировали этот энкодер, чтобы можно было запустить линию. Но это уже совсем другая история…
Резольвер
Совсем коротко о резольвере. По сути он выполняет те же функции, что и энкодер – может вычислять скорость и направление вращения двигателя. Но резольвер – аналоговый измерительный прибор. В некоторых случаях он гораздо точнее говорит об угле поворота, поскольку фактически речь идет о вычислении сдвига фаз на его выходах.
Реальный японский резольвер SMARTSYN TAMAGAWA SEIKI MODEL: TS2651N141E78, довелось когда-то ремонтировать:

Тахогенератор
Не путайте энкодер и тахогенератор (его иногда ошибочно называют тахометром)!
У них схожие функции и область применения, но у тахо от скорости вращения двигателя зависит не частота выходных импульсов, а выходное напряжение.
Посмотрите, какая конструкция установлена у нас на заводе на двигателе постоянного тока мощностью 200 кВт:

Энкодер + тахометр слиты в единое целое на валу двигателя
Тахогенераторы, как и двигатели постоянного тока, в современном оборудовании практически не используются.
Производители энкодеров
Среди российских производителей энкодеров мне известен лишь только Питерский СКБ ИС, который производит энкодеры марки ЛИР. К сожалению, российского промышленного оборудования сейчас почти не производится, и ЛИРы применяются лишь в военном и лабораторном оборудовании.
По этой причине я имею дело только с энкодерами зарубежного производства. Производителей энкодеров много – их производят почти все производители полупроводниковых датчиков. Чаще всего я встречаюсь с энкодерами Autonics – как и в случае с датчиками, в России представлен большой ассортимент. Другие известные мне производители энкодеров – немецкий Sick, японский Omron, и несколько китайских брендов.
Использование тех или иных марок энкодеров обусловлено часто не техническими причинами, поскольку их параметры, схемы подключения и надежность практически идентичны. Тут скорее политические мотивы – производители комплектующих любыми путями стараются, чтобы их продукция вошла в состав больших и массовых производственных линий, чтобы таким образом закрепиться на рынке.
Скачать
Статья, которую вы сейчас прочитали, недавно была в урезанном виде опубликована в бумажном журнале “Электротехнический рынок” под названием “Энкодер: мастхэв производственной линии”. Кому интересно, выкладываю для скачивания:
• Энкодер: мастхэв производственной линии / Статья в журнале «Электротехнический рынок» от СамЭлектрик.ру. Разновидности и примеры реального применения энкодеров. Приведены описания реальных узлов оборудования, в которых применяются энкодеры, pdf, 1.15 MB, скачан: 590 раз./
Рекомендую скачать ещё одну интересную статью по энкодерам:
• Подключение инкрементного энкодера к ПЛК / Обобщены данные о типах выходного сигнала энкодера, способах его обработки, подсчёте измеряемой частоты вращения. Пример подключения и обработки сигналов энкодера в контроллере Siemens, pdf, 2.36 MB, скачан: 434 раз./
Приглашаю коллег к обсуждению в комментариях, буду рад замечаниям и дополнениям к статье!