Одним из основных параметров для выбора энкодера является скорость вращения (ограничена максимально допустимой механической скоростью вращения, обычно указанной в документации), с которой будет вращаться его вал, установленный на вал электродвигателя, а в некоторых случаях на исполнительный орган, охватывая передачи и соединительные муфты. Этот же параметр необходимо учитывать при выборе разрешения энкодера. При вращении с большой скоростью и с большим числом импульсов на оборот, выходная частота логической части энкодера должна успевать выдавать импульсы.
Выбирая разрешение энкодера нужно убедиться в том, что большое количество импульсов на оборот будет востребовано. С увеличением скорости вращения вала энкодера количество импульсов выдаваемых энкодером в единицу времени увеличивается. Устройство, которое будет принимать импульсы должно успевать считать импульсы, поступающие на вход, от энкодера. Таким устройством может быть модуль входа обратной связи преобразователя частоты или канал входа стойки ЧПУ. Это обстоятельство необходимо учитывать при выборе энкодера. В противном случае, если частота выходного сигнала энкодера будет превышать максимальную входную частоту принимающего устройства, тогда устройство не будет успевать считать импульсы и, следовательно, правильно измерять скорость.
Совсем другой вопрос, сколько импульсов на оборот будет достаточно для обеспечения точности системы. Если речь идёт об обратной связи по скорости с приводом и электродвигателем с асинхронным короткозамкнутым ротором, то от выбранного разрешения будет зависеть поведение системы. При маленьких разрешениях на очень низких скоростях вал мотора может двигаться не плавно, а дергаться, может измениться поведение системы при удержании вала на нулевой скорости. Но однозначно определить зависимость поведения системы от низких разрешений энкодера невозможно, не зная внутреннего логического устройства привода (а это уже коммерческая информация). Самым простым способом в таком случае будет проверка поведения системы «привод – электродвигатель – энкодер» опытным путём.
Физическое подключение энкодера, как правило, осуществляется с помощью 3-х проводной (открытый коллектор) или 6-ти проводной схемы (TTL интерфейс, или линейный драйвер), но существуют и другие варианты. Выбирать способ подключения стоит исходя от принимающего устройства.
Интерфейсу TTL соответствует более высокая выходная частота энкодера. Это происходит из-за разной реализации внутренних схем. На выходе TTL энкодера стоит операционный усилитель, сигнал меряется относительно инверсного сигнала. А все сигналы энкодера с выходом открытый коллектор меряются относительно общего провода.
В качестве кабеля связи с энкодером следует использовать только кабель, рекомендуемый заводом-изготовителем. Кроме того, если на принимающем устройстве нет клемм для питания энкодера, рекомендуется предусмотреть дополнительный отдельный источник питания. Это связано с тем, что энкодер – измерительный прибор, для которого рекомендуется стабилизированное напряжение питания. Не рекомендуется запитывать от источника реле, датчики и другое оборудование, потому что помехами по шине питания они могут внести изменения в показания энкодера.
Видео:Энкодеры. Подробный обзор с экспериментами!Скачать

Измеряя параметры вращения: энкодеры Bourns

В номенклатуру энкодеров, выпускаемых компанией Bourns, входят изделия, изготовленные по трем существующим технологиям: контактные механические (для бытовых применений, а также для неответственных лабораторных и промышленных приложений), бесконтактные оптические (для аудиотехники, прецизионной измерительной, авиационной и медицинской техники, ответственных промышленных применений), бесконтактные магнитные (для сервоприводов, робототехники и точных станков).
Энкодеры – электромеханические устройства, позволяющие преобразовывать характеристики механического движения в удобную для обработки форму электрических сигналов. Они используются для определения таких параметров как угловое положение, направление, скорость и частота вращения.

Рис. 1. Номенклатура энкодеров Bourns
Области применения энкодеров обширны: от промышленных систем до медицинских приборов. Каждое конкретное приложение выдвигает вполне определенные требования к используемым энкодерам. Компания Bourns выпускает широкий спектр энкодеров с различными характеристиками, которые отвечают самым взыскательным запросам (рисунок 1):
- контактные механические, бесконтактные оптические, бесконтактные магнитные;
- квадратурные, с выходами типа «направление/шаг», абсолютные цифровые, абсолютные с ШИМ-выходом;
- со сроком службы до сотен миллионов оборотов;
- с разрешением до 1024 состояний на оборот;
- с максимальной частотой до 10 000 оборотов в секунду;
- с уровнем пыле- и влагозащищенности до IP65;
- для создания взаимодействия «пользователь-машина» (HM Interface) и «машина-машина» (MMI);
- для монтажа в отверстия, для поверхностного монтажа, монтажа на блок с дополнительным гибким кабелем.
Наиболее популярными сериями поворотных энкодеров производства компании Bourns являются PEC11, PEC12, PEC16, PEL12, ECW, EAW, EPS, EMS22, EM14, EN (рисунок 2).

Рис. 2. Внешний вид наиболее популярных серий энкодеров Bourns
Достоинства и недостатки энкодеров в значительной степени зависят от принципа их действия. В общем случае энкодеры делят на два типа: механические контактные и бесконтактные. Бесконтактные бывают двух видов: оптические и магнитные.
Компания Bourns производит энкодеры всех трех типов:
- механические контактные: PEC11, PEC12, PEC16, PEL12, ECW, EAW, EPS;
- бесконтактные оптические: EM14, EN;
- бесконтактные магнитные: EMS22.
Рассмотрим коротко принцип действия каждого из них.
Механические контактные энкодеры по принципу функционирования напоминают галетные переключатели. Основными составными частями таких энкодеров являются кодирующий элемент и скользящие контакты.
Кодирующий элемент представляет собой общий контакт сложной формы. При повороте вала энкодера скользящие контакты перемещаются, периодически замыкаясь на кодирующий элемент (общий контакт).
Читайте также: Сталь для крышки вала
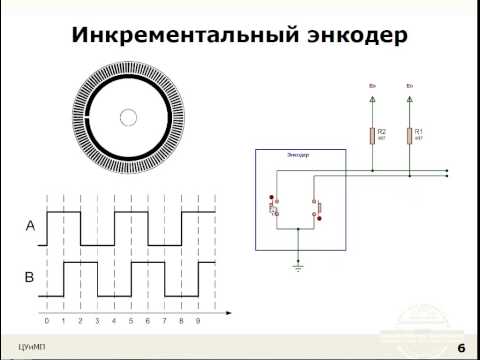
Контактные квадратурные энкодеры имеют пару скользящих контактов (A и B). Они выполнены таким образом, что диаграммы их замыкания на кодирующий элемент оказываются сдвинутыми на 90° (рисунок 3). По порядку следования сигналов определяется направление вращения. По числу импульсов можно судить о частоте оборотов.

Рис. 3. Диаграммы сигналов квадратурного энкодера
Квадратурный энкодер может быть достаточно просто реализован с помощью оптических схем.
Бесконтактные оптические энкодеры. Конструкция приборов данного типа подразумевает использование нескольких основных элементов (рисунок 4): источников света, кодирующего диска, фотоприемников.

Рис. 4. Структура оптического энкодера
Кодовый диск имеет просветы (окна), через которые может проникать световой поток, создаваемый источниками света (ИК-светодиодами). Если свет прошел через окно на диске, то он фиксируется фотоприемником. Если свет не попадает в окно – то он отражается от диска и не фиксируется приемником.
При вращении вала световой поток периодически прерывается диском и формирует переменный выходной сигнал приемника. Частота сигнала пропорциональна частоте вращения вала.
В оптических энкодерах производства Bourns фотоприемники входят в состав специальной интегральной схемы ASIC (Application-specific integrated circuit). Эта ИС преобразует сигнал приемников в электрические выходные сигналы (рисунок 4).
В случае квадратурного энкодера формируются два сигнала, сдвинутых на 90°.
Бесконтактные магнитные энкодеры. Приборы этого типа используют эффект Холла, который заключается в образовании разности потенциалов на поверхности проводящего материала при протекании через него тока при наличии внешнего магнитного поля. Этот эффект был открыт Эдвином Холлом в 1879 году. Рассмотрим его более подробно.
Как известно, на электрический заряд, движущийся в магнитном поле, действует сила Лоренца, смещающая заряд в направлении, перпендикулярном направлению тока (рисунок 5).

Рис. 5. Принцип действия магнитных энкодеров
Если поместить в магнитное поле проводящую или полупроводниковую пластину и пропустить через нее ток, то под действием силы Лоренца электроны начнут смещаться и скапливаться на одной из поверхностей пластины. Дырки будут скапливаться на противоположной поверхности. Возникнет разность потенциалов.
В энкодерах вращение вала приводит к изменению магнитного поля и соответствующему изменению напряжения датчика Холла. При постоянном вращении возникает синусоидальное напряжение. Электронная схема усиливает и преобразует этот сигнал в удобную для обработки форму. На базе датчиков Холла строят инкрементальные абсолютные ШИМ-энкодеры.
Использование того или иного принципа функционирования во многом определяет значения эксплуатационных характеристик энкодеров.
Видео:Датчики вращения: энкодеры и тахогенераторыСкачать

Параметры энкодеров
Энкодеры имеют множество важных электрических, метрологических и эксплуатационных характеристик.
Типы выходных сигналов энкодеров. По значению выходного сигнала энкодеры Bourns делятся на четыре типа:
- Инкрементальные (квадратурные) энкодеры. Для них выходными сигналами являются сдвинутые друг относительно друга прямоугольные импульсы. Сдвиг по фазе позволяет определять направление вращения.
- Энкодеры с выходами «направление/шаг». Такие приборы имеют пару выходных сигналов. Один из них кодирует направление, второй представляет собой прямоугольные импульсы с частотой, пропорциональной частоте вращения.
- Абсолютные цифровые энкодеры. Для них выходным является двоичный код абсолютного положения вала. Разрядность кода, как правило, составляет 4…16 бит.
- Абсолютные энкодеры с ШИМ-выходом. Выходной сигнал таких приборов представляет собой ШИМ со скважностью, пропорциональной абсолютному положению вала.
Максимальная частота вращения (Speed of Rotation), об/мин – максимальная частота вращения энкодера, при которой не происходит потеря информации. Контактные энкодеры начинают пропускать импульсы уже на частотах выше нескольких десятков оборотов в минуту. Бесконтактные оптические датчики эффективны на частотах до нескольких тысяч об/мин. Магнитные энкодеры способны работать на частотах до 10 000 об/мин и выше.
Износостойкость или цикличность до сбоя (Rotational Life), оборотов, характеризует механический износ прибора. Износ характерен для всех типов энкодеров из-за наличия вращающихся частей.
Наличие износа контактных групп приводит к тому, что срок службы контактных энкодеров оказывается меньшим по сравнению с бесконтактными приборами.
Разрешающая способность (Resolution Range). Для разных типов энкодеров разрешающая способность определяется по-разному:
- для квадратурных энкодеров и энкодеров с выходами «направление/шаг» этот параметр характеризует число импульсов на один оборот;
- для цифровых абсолютных энкодеров разрешение определяется разрядностью выходного кода;
- для абсолютных энкодеров с ШИМ-выходом разрешение определяется разрядностью ШИМ.
Чем выше разрешающая способность, тем точнее может быть определено положение вала.
Диапазон рабочих температур, °С – важная характеристика для большинства промышленных приложений и автоэлектроники.
Уровень пыле- и влагозащищенности IP определяет возможность работы в жестких условиях окружающей среды.
Тип монтажа – пайка в отверстия, поверхностный монтаж, монтаж на блок. Выбирается исходя из требований конкретного приложения.
Качественное сравнение энкодеров различных технологий. Области применения энкодеров
Энкодеры с различными принципами функционирования имеют как достоинства, так и недостатки. Это определяет области их применения. (таблица 1).
Таблица 1. Сравнение и области применения контактных и бесконтактных энкодеров
| Сравнение характеристик различных технологий энкодеров | Параметр | Приложения | |||||
| Контактные | Бесконтактные | Автоэлектроника | Медицинская техника | Измерительная техника | Профессиональные аудиоприложения | Промышленные приложения | |
| Хуже | Лучше | Диапазон рабочих температур | H | M | H | L | M |
| Хуже | Лучше | Температура хранения | H | M | H | L | M |
| Хуже | Лучше | Максимальная частота вращения | M | M | H | M | H |
| Хуже | Лучше | Разрешение | M | H | M | M | M |
| Хуже | Лучше | Срок службы | H | H | M | H | H |
| Лучше | Хуже | Стоимость | – | ||||
| H – высокая значимость параметра для приложения. M – средняя значимость параметра для приложения. L – низкая значимость параметра для приложения. | |||||||
Читайте также: Подшипник кпп первичного вала hover 35х80х24
Механические энкодеры имеют явные достоинства: низкую стоимость изготовления, простую схему включения, высокую устойчивость к статике.
Однако при проектировании следует учитывать и некоторые особенности. Механическое воздействие при переключениях приводит к изнашиванию контактов и росту их сопротивления. Срок службы механических энкодеров не превышает десятков тысяч оборотов.
Необходимость создания механических контактов в контактных датчиках ограничивает разрешающую способность.
Максимальная частота вращения контактных энкодеров ограничена несколькими десятками об/мин. На более высоких частотах для них характерен пропуск импульсов.
Еще одним следствием механических переключений является дребезг контактов.
По всем перечисленным параметрам бесконтактные датчики имеют явное преимущество: их разрешение достигает 16 бит, срок службы ограничивается износом подшипников и может превышать 100 млн. поворотов, максимальная частота составляет 10 000 об/мин. Однако следует учитывать их высокую стоимость и чувствительность к статике.
Анализ требований различных областей электроники показывает, что для контактных энкодеров оптимальным применением будут системы взаимодействия «пользователь-машина» (HMI):
- профессиональная и бытовая аудиотехника (ручки громкости, эквалайзеры);
- бытовая техника (радио, климат-контроль);
- автомобильная техника (магнитолы, приемники, климат-контроль);
- медицинская техника (мониторы состояния пациента, лабораторное оборудование);
- измерительная техника (осциллографы, блоки питания, генераторы);
- промышленные системы управления (пульты операторов);
Бесконтактные датчики используются в тех же областях, но для более ответственных приложений, менее критичных к стоимости комплектующих. Кроме того, они используются в MMI-системах, например, для управления электродвигателями.
Видео:Как вычислить скорость вращения мотора используя энкодерСкачать

Обзор контактных серий энкодеров Bourns
Наиболее популярными сериями контактных энкодеров Bourns являются PEC11x, PEC12 и ECW (таблица 2).
Таблица 2. Серии контактных энкодеров производства Bourns
| Параметр | Наименование | ||||||||
| PEC11R | PEC11L | PEC11S | PEC12R | ECW | PEC16 | EPS | PEL12S, PEL12D, PEL12T | EAW | |
| Технология | Контактная | ||||||||
| Тип | Инкрементальный | Абсолютный | |||||||
| Установочный диаметр, мм | 12 | 11 | 12 | 12 | 22 | 16 | 22 | 12 | 22 |
| Класс защиты | IP40 | IP40 | IP40 | IP40 | IP40 | IP40 | IP40 | IP40 | IP40 |
| Фиксация | + | + | + | + | + | + | + | + | – |
| Дополнительный выключатель | + | + | + | + | – | + | + | + | – |
| Материал вала | Металл | Пластик | |||||||
| Материал крепежной гайки | Металл | Пластик | Металл | Пластик | Металл | Пластик | |||
| Монтаж | В отверстия | SMD | В отверстия | ||||||
| Разрешение, имп/об | 12, 18, 24 | 15, 20 | 15 | 12, 24 | 6, 9, 12, 24, 36 | 12, 24 | 6, 9, 12, 24, 36 | 24 | 128 |
| Максимальная частота вращения, об/мин | 60 | 60 | 60 | 100 | 120 | 100 | 120 | 100 | 120 |
| Нагрузка выводов, мА (В) | 10 (5) | 10 (5) | 10 (5) | 1 (5) | 10 (10) | 10 (5) | 10 (12) | 0,5 (5) | 10 (10) |
| Цикличность до сбоя, тысяч оборотов | 30 | 100 | 15 | 30 | 200 | 200 | 200 | 60 | 50 |
| Диапазон рабочих температур, °С | -30…70 | -20…80 | -30…70 | -30…70 | -40…85 | -30…70 | 1…85 | -10…70 | -40…85 |
Серии PEC11x обладают самыми скромными характеристиками среди перечисленных семейств. Для них максимальная рабочая частота вращения не превышает 60 об/мин.
Серия PEC11R имеет исполнение для монтажа в отверстия. Максимальное разрешение – до 24 импульсов на оборот. Срок службы для таких энкодеров превышает 30 тысяч оборотов. Функционировать они могут в диапазоне температур -30…70°С.
PEC11S имеет схожие характеристики, но предназначена для монтажа на плату. Минимальный срок жизни для таких энкодеров составляет 15 тысяч оборотов.
PEC11L предназначена для монтажа в отверстия и имеет увеличенную износостойкость – 100 000 оборотов.
Серия PEC12R, по сравнению с PEC11, имеет увеличенную максимальную частоту вращения – 100 об/мин.
PEC16 отличается отличной износостойкостью, до 200 тысяч оборотов, и высокой максимальной частотой вращения.
EPS идеально подойдет для лабораторных блоков благодаря высокой износостойкости (до 200 тысяч) и высокой разрешающей способности (до 36 импульсов на оборот вала). Применение в промышленной электронике ограничено из-за узкого температурного диапазона (1…85°С).
Серия ECW имеет лучшие среди перечисленных серий характеристики: рабочая частота – до 120 об/мин, срок службы – 200 тысяч оборотов, разрешающая способность – до 36 импульсов на оборот вала.
Отдельно стоит отметить серии PEL12x и EAW.
PEL12x снабжены дополнительными светодиодами, а в качестве световода используется вал энкодера. Питание светодиодов производится с помощью дополнительных выводов. Электрические характеристики этих серий близки к характеристикам PEC11 и PEC12. Серия PEL12S выпускается с одним светодиодом (красный, синий, зеленый, оранжевый, белый). Серия PEL12D выпускается с двумя светодиодами (четыре комбинации сочетаний цветов). Серия PEL12T имеет три светодиода комбинации RGB.
EAW – единственная контактная серия, реализующая абсолютное измерение положения. На выходе энкодера формируется 8-битный код. При этом, как и в случае с другими контактными энкодерами, выходы выполнены в виде сухих контактов, то есть должны быть подтянуты к напряжению питания.
Схема подключения контактных энкодеров Bourns достаточно проста (рисунок 6). Эквивалентная схема контактных квадратурных энкодеров представляет собой два параллельных ключа с общим выводом (вывод С). Для фиксации замыканий используется подтяжка к напряжению 5 В. Для серии EAW необходима подтяжка всех восьми выходных линий. Почти все серии имеют версии с дополнительным встроенным ключом.

Рис. 6. Схема подключения контактных квадратурных энкодеров Bourns
Читайте также: Ваз неисправность датчика положения распределительного вала
Контактные серии оптимизированы для построения HMI-систем. Для таких систем небольшая максимальная частота вращения и ограниченный срок службы не являются критичными параметрами. Зато эти энкодеры имеют возможность фиксации положений вала, дополнительный встроенный выключатель и низкую стоимость. Основными областями применения серий являются:
- аудиотехника (ручки громкости);
- бытовая электроника (климат-контроль);
- музыкальные инструменты (гитары, микшеры);
- измерительные лабораторные приборы (генераторы, осциллографы);
Видео:Энкодер — датчик угла поворота на базе EC12E. Как работает и чем отличается от потенциометраСкачать

Обзор серий оптических энкодеров серий EM14 и EN
Серии оптических энкодеров Bourns являются отличной альтернативой контактным сериям в приложениях, требующих повышенной чувствительности, производительности и увеличенного срока службы.
Оптические энкодеры EN и EM14 обладают всеми перечисленными свойствами (таблица 3).
Таблица 3. Серии бесконтактных оптических энкодеров Bourns
| Параметр | Наименование | |
| EM14 | EN | |
| Технология | Оптическая | |
| Тип | Инкрементальный | |
| Установочный диаметр, мм | 14 | 21×16 |
| Класс защиты | IP54 | IP40 |
| Фиксация | + | – |
| Дополнительный выключатель | + | – |
| Материал вала | Металл | |
| Ручка | Металл | |
| Монтаж | В отверстия или с помощью гибкого кабеля | |
| Разрешение, имп/об | 8, 16, 32, 64 | 25, 50, 64, 100, 125, 128, 200, 256 |
| Максимальная частота вращения, об/мин | 120 | 300; в версии с дополнительным подшипником – до 3000 |
| Уровень выходных сигналов | TTL, CMOS, HCMOS | TTL, CMOS |
| Цикличность до сбоя, миллионов оборотов | 2 | 10 или 20 |
Серия EM14 является оптическим аналогом контактных серий. Максимальная частота для EM14 составляет 120 об/мин, срок жизни увеличен до 2 миллионов оборотов.
Еще одним преимуществом EM14 является базовое исполнение IP54, что делает возможным применение этой серии в промышленных приложениях.
Энкодеры EM14 идеально подходят для построения систем управления в различных областях электроники:
- в профессиональной аудиотехнике (мониторы, эквалайзеры, гитарные усилители);
- измерительной технике (осциллографы, анализаторы спектра);
- авиационной технике (авиационные учебные симуляторы, системы контроля авиатраффика);
- промышленной технике (управление электродвигателями, промышленные джойстики, пульты операторов);
- медицинской техника (УЗИ, рентгеновские установки);
Серия EN имеет максимальное разрешение до 256 импульсов на оборот. Это позволяет применять данные энкодеры не только для определения направления и скорости вращения, но и для определения положения ротора электродвигателей и сервоприводов. Дополнительное преимущество серии EN – максимальная частота вращения до 3000 об/мин.
Использование подшипников позволило увеличить срок службы до 200 миллионов оборотов
Эта серия применяется в особо чувствительных приложениях (профессиональная аудиотехника), в промышленной и бытовой автоматизации (сервоприводы).
Оптические энкодеры питаются от напряжения 5 В (рисунок 7). Выходные сигналы каналов не требуют подтяжки и имеют уровень TTL /КМОП.

Рис. 7. Внутренняя схема оптических энкодеров Bourns
Видео:Энкодер с мерным колесом см 5 VDC выход Totem Pole ENC-1-2-T-5Скачать

Обзор серии магнитных энкодеров EMS22
Серия EMS22 обладает всеми достоинствами магнитных энкодеров: большим сроком жизни, высокой максимальной частотой вращения, отличной разрешающей способностью (таблица 4).
Таблица 4. Серии бесконтактных магнитных энкодеров Bourns
| Параметр | Наименование | |||
| EMS22A | EMS22D | EMS22P | EMS22Q | |
| Технология | Магнитная | |||
| Тип | Абсолютный | Направление/шаг | ШИМ | Инкрементальный |
| Установочный диаметр, мм | 21×16 | |||
| Класс защиты | IP65 | |||
| Фиксация | – | |||
| Дополнительный выключатель | – | |||
| Материал вала | Металл | |||
| Ручка | Металл | |||
| Монтаж | В отверстия или с помощью гибкого кабеля | |||
| Разрешение, имп/об | 1024 состояний | 64, 128, 256, 512 | 1024 состояний | 64, 128, 256, 512 |
| Максимальная частота вращения, об/мин | 10 000 | |||
| Уровень выходных сигналов | TTL, CMOS | |||
| Цикличность до сбоя, миллионов оборотов | 100 | |||
| Диапазон рабочих температур, °С | -40…125 | |||
Существует четыре модификации серии EMS22, отличающиеся типом выходного сигнала.
- EMS22Q. Квадратурные энкодеры. На выходе энкодера формируется пара, сдвинутых на 90° прямоугольных сигналов. Максимальное разрешение составляет 512 импульсов на оборот.
- EMS22D – энкодеры с выходными сигналами «направление/шаг». Максимальное разрешение составляет 512 импульсов на оборот.
- EMS22A. Абсолютные энкодеры. Формируют 10-битный код положения вала. Код передается по последовательному интерфейсу. Возможно каскадирование энкодеров (рисунок 8).
- EMS22P. Абсолютные энкодеры с ШИМ-выходом. На выходе формируют ШИМ-сигнал со скважностью, пропорциональной положению вала. Разрядность ШИМ – 10 бит.
Для всех модификаций напряжение питания составляет 5 В, а уровень выходных сигналов – TTL/CMOS.

Рис. 8. Схема подключения магнитных энкодеров Bourns серии EMS22A
Стоит особо подчеркнуть, что серии EMS22 созданы в первую очередь для построения MMI-систем. Они обладают всеми необходимыми для таких приложений свойствами:
- высокой максимальной частотой вращения до 10 000 оборотов;
- большим сроком жизни до 100 миллионов оборотов;
- отличной разрешающей способностью;
- расширенным диапазоном рабочих температур -40…125°С;
- высокой степенью пыле- и влагозащиты IP65.
Благодаря перечисленным качествам, EMS22 могут применяться в широким спектре приложений, таких как управление бесколлекторными двигателями, сервоприводы, промышленные джойстики, робототехника; станки (гильотины, прессы) и так далее.
Видео:#7/9 Энкодер. Определение скорости. Програмное интегрирование АрдуиноСкачать

Заключение
В настоящее время существует три основных технологии энкодеров: контактные механические, бесконтактные оптические, бесконтактные магнитные. Бесконтактные энкодеры имеют значительное преимущество по сроку службы и максимальной частоте вращения. Однако механические энкодеры отличаются низкой стоимостью. Выбор конкретного типа прибора необходимо производить с учетом требований конкретного устройства.
Компания Bourns производит широкий спектр энкодеров, стараясь обеспечивать разработчиков технологически. В линейке Bourns можно отыскать энкодеры для практически любого применения.
КОМПЭЛ, как официальный партнер Bourns, поддерживает на складе наиболее популярные модели энкодеров, предоставляет техподдержку, образцы, специальные цены и плановые проектные поставки.
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала
🎥 Видео
Инкрементальный энкодер с полым валом 6 мм 200 имп/об 5 VDC Артикул E40H6-200-3-N-5Скачать

Уроки Arduino. Работа с энкодеромСкачать
Энкодер, что я об этом знаю ) / Использование Simatic для обработки сигнала энкодеровСкачать
Энкодеры Назначение, параметры и сфера примененияСкачать
Энкодер с памятью (Trema-модуль v2.0) | Новинка от iarduino.ruСкачать
☭ SIEMENS LOGO! + Incremental Encoder - Отслеживаем двухсторонние вращение вала энкодера.(1080p HD)Скачать
Датчики угла поворота энкодерыСкачать
Лекция 32: ЭнкодерСкачать
Энкодер + arduino - вращение с нажатием, нажатие, длинное нажатие и вращение без нажатия.Скачать
Программирование ПЛК. 17. Энкодеры. Эксперименты.Скачать
11 03 2016 Датчики угла поворота Autonics Запись вебинараСкачать
ПР103. Подключение энкодеровСкачать