
Принцип действия гидролокатора основан на использовании явления пьезоэффекта — возникновения разноименных электрических зарядов на противоположных гранях кристалла кварца при его сжатии или растяжении. Это явление было открыто и изучено французскими учеными братьями П. и Ж. Кюри еще в 1880 г. Пьезоэлектрический эффект оказался обратимым, т. е. при подведении переменного электрического тока к граням кристалла последний начинает колебаться с той же частотой, что и частота тока. Длительное время открытие братьев Кюри оставалось без практического применения, пока в 1914 г. на него не обратил внимание французский ученый П. Ланжевен. Для усиления мощности колебаний П. Ланжевен сделал из маленьких кварцевых пластинок одну большую, которую назвал мозаикой. Кварцевую мозаику он вложил между двумя стальными пластинами, которые скрепляли ее и одновременно служили электродами.
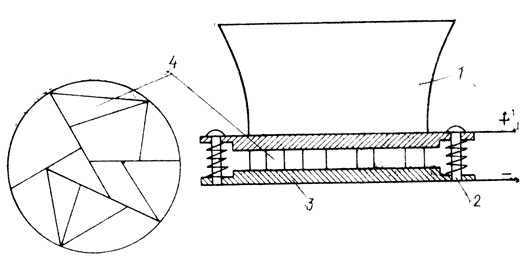
Металлокварцевый излучатель П. Ланжевена. 1 — приемник; 2 — упругий подвес; 3 — электроды; 4 — кварцевая мозаика
Для того чтобы достичь большой амплитуды колебаний, ученый использовал явление резонанса. Предварительно рассчитав собственную частоту колебаний пластинок, он подвел к электродам переменный ток с такой же частотой. В результате получился ультразвуковой излучатель.
П. Ланжевен разработал кварцевый излучатель, идея же самого прибора — гидролокатора — принадлежит русскому изобретателю К. В. Шиловскому, который находился в то время во Франции в политической эмиграции. Им же был создан опытный образец прибора с электроакустическим преобразователем. По предложению французского правительства П. Ланжевен присоединился к исследованиям К. Шиловского, и в мае 1916 г. они получили патент под наименованием: «Описание аппаратов и способов их применения для подачи направленных подводных сигналов и для локализации подводных препятствий» [14].
Главная деталь гидролокатора — кварцевый преобразователь (излучатель), который при прохождении через него переменного электрического тока производит звуковые колебания. После излучения импульса преобразователь переключается на режим приема колебаний и с этого момента начинает принимать звуковое эхо, отраженное от любых подводных препятствий, находящихся на пути луча гидролокатора. Измеряя время, прошедшее между моментом посылки сигнала и моментом возвращения его к приемнику, можно определить расстояние до объекта.
Важным свойством ультразвуковых колебаний является распространение их в заданном направлении в отличие от слышимых звуков, которые расходятся во все стороны одинаково. Используя это свойство, с помощью гидролокатора определяют не только расстояние, но и направление (пеленг) на объект.
Чтобы получить более широкий угол обзора или даже исследовать пространство вокруг себя, излучатель-приемник последовательно поворачивают в пространстве. Такое изменение направления сигналов называют сканированием. Сканирование может производиться или механическим способом, т. е. путем поворота излучателя, или электронным — путем последовательного подключения различным образом ориентированных приемников.
Свойством пьезоэффекта обладают кроме кристаллов кварца и другие химические соединения, например сегнетова соль, цинковая обманка, хлорат натрия и др. В последнее время за рубежом излучатели ультразвука изготовляют из керамики — титаната или цирконата бария, которые обладают лучшей прочностью и надежностью, чем другие кристаллы.
Структурная схема электронного способа сканирования. 1 — приемник; 2 — поворотное устройство; 3 — приемная аппаратура
Ультразвуковые колебания можно получить также, используя явление магнитострикции, открытое английским ученым Дж. Джоулем в 1847 г. Изучая магнитные свойства металлов, он обнаружил, что при перемагничивании электрическим током стержней из железа и никеля они изменяют свои размеры. Явление магнитострикции тоже обратимо: при быстром сжатии и растяжении железных или никелевых сердечников электромагнита возникает переменное магнитное поле, а если обмотка электромагнита замкнута, то в ней образуется переменный электрический ток, частота которого совпадает с частотой колебаний сердечника.
Созданные К. Шиловским и П. Ланжевеном гидролокаторы успешно применяли для обнаружения подводных лодок противника в годы первой и второй мировых войн. А вот для поиска затонувших подводных лодок до 50-х годов из акустических средств использовали только один прибор — эхолот. От гидролокатора он отличается тем, что звуковой луч направлен вертикально вниз. Строго говоря, эхолот не является средством поиска. Это в первую очередь навигационный прибор, предназначенный для измерения глубины.
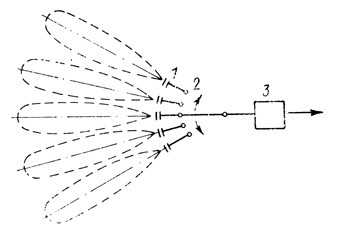
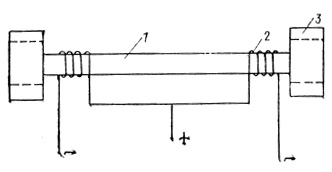
Схема магнитострикционного излучателя. 1 — плоски ферритовый вибратор; 2 — обмотка возбуждения; 3 — магниты для подмагничивания вибратора
Эхолот позволяет уточнить положение лодки, если место ее затопления приблизительно известно. При прохождении в этом районе поискового судна прибор может зафиксировать характерное изменение глубины, если вертикальные размеры затонувшего объекта составляют не менее 5-8% от глубины моря.
В 1942 г. английским противолодочным силам в Средиземном море удалось потопить немецкую подводную лодку, причем один из эсминцев точно зафиксировал место ее гибели. В указанный район направилась группа спасательных судов и приступила к поискам лодки с помощью эхолотов. Спасатели ходили параллельными курсами, смещаясь на каждом галсе в сторону на 450 м. Лодку нашли через сутки на глубине 73 м и сумели достать из нее секретное оборудование [7, с. 197].
В 1956 г. эхолот спасательного судна ФРГ «Зигрид» обнаружил в проливе Каттегат на глубине 50 м немецкую подводную лодку «V-2365». Она была затоплена экипажем в 1945 г. перед капитуляцией Германии. После обследования лодку подняли плавучим краном за 3 сут. Все ее механизмы и оборудование перед затоплением были законсервированы и хорошо сохранились, поэтому после небольшого ремонта и модернизации лодка вошла в состав подводного флота ФРГ [64].
За свою сравнительно короткую историю существования гидролокатор претерпел значительные изменения как по дальности обнаружения объекта, так и по внешнему виду. В 1916 г. с его помощью обнаруживали подводную лодку на расстоянии до 2 км, современный же гидролокатор большинства флотов мира может зафиксировать ее на расстоянии 50 км. Правда, речь идет о плавающих лодках. Возможности гидролокаторов при поисках затонувших лодок значительно скромнее и не превышают 1 км.
Еще больше возросли массогабаритные характеристики приборов. В период первой мировой войны их масса измерялась сотнями килограммов, в наши дни она может достигать 60 т (например, гидролокаторы США типа AH/SQS-26), а диаметр их приемной антенны, состоящей из 576 приемоизлучающих элементов, — почти 5 м. Увеличение размеров акустических антенн продолжалось бы и дальше, если этому не воспрепятствовали судостроители, справедливо возражавшие против превращения судна в носителя гидролокационных средств. Это заставило инженеров-гидроакустиков разрабатывать другие способы совершенствования поисковых приборов.
К тому же гидролокаторы не лишены недостатков. Их работу затрудняют прежде всего помехи, под которыми в гидролокации понимают сигналы, отраженные от предметов или грунта и имеющие тот же характер, что и искомый объект.
Основной вид помех — реверберационные, т. е. звуковые, колебания, отражающиеся от поверхности и дна моря, а также от облаков газовых пузырьков, выделяемых морскими микроорганизмами. В соответствии с этим различают поверхностную, донную и объемную реверберацию.
При поиске затонувших объектов главное значение имеет донная реверберация, на величину которой оказывают влияние три фактора: угол скольжения (угол между грунтом и направлением звуковой волны), частота звукового колебания и характер грунта. Наиболее сильная реверберация наблюдается у скалистых и крупнокаменистых грунтов. Но она может возникнуть и при локации глинистых неровных грунтов на малых углах скольжения.
Интересно, что при сильной донной реверберации контрастность сигнала не зависит от мощности акустического излучения и расстояния до объекта. В этих случаях для выделения сигнала на фоне помех прибегают к сужению диаграммы направленности сигнала или изменяют угол скольжения. Получить узкую диаграмму направленности можно, используя преобразователи с высокой частотой излучения или увеличивая их конструктивные размеры. Последнее, как уже отмечалось, вызывает возражение судостроителей. Поэтому, чтобы не увеличивать размеры антенн, применяют так называемые бортовые антенны (планарные решетки), т. е. размещают преобразователи группами вдоль всего борта судна.
Реверберация наблюдается не только при отражении звуковых волн от дна, но и от более плотных слоев воды, появление которых связано с резким изменением температуры или солености («жидкий грунт»). В этом случае реверберация сопровождается рефракцией (преломлением) звуковых лучей, что ухудшает условия обнаружения подводных объектов. При рефракции образуются так называемые мертвые зоны, в которые не попадают прямые звуковые сигналы.
Читайте также: Редуктор соосный для электродвигателя
Кроме реверберации и рефракции существенной помехой для работы гидролокатора может служить шум от работы собственных механизмов и движителей, а также возникающий при обтекании потоком воды корпуса судна во время его движения. Для того чтобы избавиться от двух последних недостатков, в 50-х годах во многих зарубежных странах, и прежде всего в США, стали разрабатывать буксируемые гидролокаторы или гидролокаторы переменной глубины. Особенность их конструкции заключалась в том, что вся радиоэлектронная аппаратура размещалась на борту судна, а преобразователь в специальном контейнере буксировался за судном на определенной глубине.
Гидролокаторы этого типа позволили снизить влияние собственных помех судна-носителя и обеспечили успешный поиск объектов, находящихся под слоем температурного скачка. Кроме того, управляя глубиной буксировки преобразователя» можно выбирать наилучшие условия обнаружения объектов. Буксируемые контейнеры также достигают значительных размеров. Например, у буксируемого гидролокатора типа «Асдик» (Англия) длина контейнера составляет 3,5 м, высота около 1,8 м, масса — около 3 т [32].
В 60-х годах в ряде зарубежных стран появились гидролокаторы принципиально нового типа — гидролокаторы бокового обзора. Их стали устанавливать на подводных аппаратах и буксируемых поисковых системах. Импульсы акустической энергии, посылаемые излучателями, представляют веерообразные лучи, узкие в горизонтальной плоскости (угол раствора — до 1°) и широкие в вертикальной (угол раствора — 30-50°).
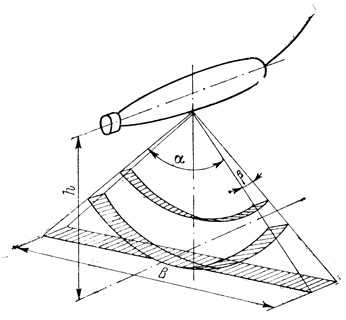
Схема действия зарубежного гидролокатора бокового обзора. B — ширина полосы обзора: h — отстояние от грунта; α и β — углы раствора в вертикальной и горизонтальной плоскостях
Такая узконаправленная диаграмма ориентирована перпендикулярно диаметральной плоскости судна-носителя и позволяет при его движении последовательно обследовать полосу грунта шириной B. В результате на ленте самописца появляется изображение рельефа площади дна, а не профиля, как при работе эхолота.
Гидролокаторы бокового обзора обладают меньшей дальностью обнаружения, чем судовые, но зато имеют более высокую разрешающую способность. Зарубежные образцы, по сообщениям печати, могут обнаружить отдельные камни диаметром 46 см на расстоянии до 120 м, а диаметром 1,2 м — до 360 м. Благодаря этому свойству гидролокаторы бокового обзора успешно используют при поисках небольших объектов и обломков корпусов затонувших подводных лодок [8, 32].
По сравнению со всеми рассмотренными ранее устройствами подводного поиска гидролокаторы обладают наибольшей дальностью ббнаружения при более высокой скорости движения носителя.
Но, как отмечалось выше, эффективность их поиска в значительной степени снижается за счет различного рода помех, возникающих при обследовании дна. В районах со скальным или крупнокаменистым грунтом они часто оказываются бесполезными, так как эхо-сигнал, отраженный от крупных валунов и скал, имеет те же характеристики, что и затонувшая подводная лодка. Так во многих странах пришли к мысли о необходимости создания комбинированных систем подводного поиска, основанных на использовании нескольких физических полей, дополняющих друг друга. Подобные комбинированные системы поиска появились в середине 60-х годов, но им предшествовала одна из величайших трагедий в истории подводного флота.
ГИДРОЛОКАТОР
ГИДРОЛОКАТОР (сонар), аппаратурный комплекс для определения с помощью акустических сигналов положения подводных и плавучих объектов (первоначально этот термин использовался применительно к эхолокационным приборам для обнаружения подводных лодок, теперь употребляется в более широком значении). Главными элементами гидролокатора являются подводный излучатель мощного акустического сигнала и чувствительный приемник, реагирующий даже на слабые отражения этого сигнала от погруженных в воду объектов. Конструируются оба эти элемента с таким расчетом, чтобы их компоновка в локаторе обеспечивала определение направления на отражающий объект и расстояния до него. На подводных лодках и надводных судах гидролокаторы служат основными – а зачастую и единственными – средствами сбора информации об условиях и обстоятельствах под морской поверхностью. На атомных подводных лодках специальные гидролокаторы применяются в качестве навигационных приборов. Крупные корабли оснащаются эхолотами – гидролокаторами, измеряющими глубину океана. На многих рыбопромысловых судах гидролокаторы используют для обнаружения рыбных косяков; биологи, занимающиеся морскими животными, с помощью гидролокаторов изучают звуки, издаваемые представителями морской фауны.
Под водой акустический пучок, подобно лучу прожектора или радара в воздухе, наводится на цель, и отраженная от нее звуковая энергия поступает в приемник. Из сонара, как из радара, излучение испускается короткими импульсами. Расстояние до цели определяется как произведение скорости звука в воде на половину временного интервала между испусканием импульса и прибытием его эха. Поскольку приемная антенна сонара имеет острую диаграмму направленности, пеленг цели определяется поворотом микрофона при его настройке на эхо. На практике оператор следит за световыми метками на панорамном экране, которые соответствуют обнаруженным объектам, и это значительно облегчает их локацию. Дальность действия гидролокатора ограничена радиусом в несколько километров. Скорость звука в воде равна приблизительно 1,5 км/с, поэтому гидролокационный поиск гораздо медлительней радиолокационного или светового поиска в атмосфере. Из-за относительно большой длины волны звука у гидролокатора довольно слабое пространственное разрешение: там, где глаз различал бы каждую заклепку на корпусе корабля, сонар «увидит» только все судно как единое пятно. К тому же морская вода – далеко не идеальная среда для распространения звука.
Идея гидролокатора не нова. Еще во время Первой мировой войны гидрофоны применялись на надводных кораблях и подводных лодках для обнаружения вражеских судов методами пассивной шумопеленгации. Позже были созданы пьезоэлектрические преобразователи и электронные усилители сигналов звукового диапазона, что привело к развитию систем активной гидролокации. С тех пор разработано много видов совершенных приборов, среди них гидролокатор кругового обзора, гидролокатор переменной глубины и др.
Устройство гидролокатора.

Гидролокаторы делятся на два основных типа: активные (излучающие сигнал и принимающие его отражение) и пассивные (принимающие шумы, издаваемые целью). Рассмотрим здесь блок-схему активного гидролокатора кругового обзора (рис. 1).
Преобразователь
представляет собой устройство, в котором электрическая энергия преобразуется в механическую и наоборот. Такими преобразователями являются, например, микрофоны и громкоговорители. В гидролокаторе преобразователь исполняет обе функции. Обычно он размещается на днище надводного корабля и в верхней части корпуса подводной лодки. Иногда преобразователями служат пьезоэлектрические кристаллы (они меняют свои размеры при подаче на них электрического напряжения либо меняют форму при воздействии внешних сил, и на их поверхности возникает разность электрических потенциалов), но в данной схеме используется магнитострикционный (одновременно магнитоупругий) элемент – никелевый стержень с намотанной на него проволочной катушкой индуктивности. При нарастании электрического тока в катушке возникает магнитное поле, сжимающее стержень, при убывании тока – поле, растягивающее его. На конце стержня закреплена диафрагма, соприкасающаяся с водой, поэтому при сокращениях и удлинениях стержня в воде возбуждаются упругие колебания – звуковые волны. По прибытии эха все происходит в обратном порядке, и движения диафрагмы возбуждают ток в катушке. Набор таких преобразователей располагается по кругу в горизонтальной плоскости; каждый из них ориентирован в своем направлении. Передатчик воздействует на все преобразователи одновременно, и звуковые волны уходят сразу во всех направлениях. Но каждый преобразователь соединен с приемником отдельно, поэтому направление на цель определяется по тому элементу, который «слышит» эхо.
Передатчик.
Оператор сидит за пультом управления, контролируя работу передатчика – мощного генератора ультразвуковых импульсов (средняя мощность типичного передатчика – ок. 8 кВт, пиковая в импульсе достигает 160 кВт). Несущая частота передатчика фиксирована ок. 20 кГц, а длительность импульса может меняться оператором от 0,005 до 0,1 с. Частота повторения импульсов тоже может варьироваться от 1 до 60 имп/мин – в зависимости от максимальной величины радиуса зоны обзора (все эхо-сигналы должны быть приняты до момента посыла следующего импульса). Выбор частоты передатчика зависит от нескольких величин, влияние которых противоположно: с увеличением частоты возрастают потери на трассе, но интенсивность принимаемых собственных шумов воды и габариты преобразователя становятся меньше. Из этих соображений наиболее выгодным диапазоном эхолокации является полоса частот от 18 до 24 кГц. Акустические устройства шумопеленгации наиболее эффективно работают на частотах ниже 1 кГц, на которых наиболее мощно излучаются шумы кораблей. Выходная мощность передатчика ограничивается сверху тем ее значением, при котором в воде возникает кавитация (см. КАВИТАЦИЯ). Кавитационные пузырьки незамедлительно отражают в преобразователь существенную долю излучаемой мощности. С увеличением давления (т.е. глубины) возрастает и допустимый предел излучаемой акустической мощности.