
Расстановка точек над соединением по шине контроллеров SmartWeb и Kromschröder E8.
Внимание!
Контроллеры SmartWeb и Kromschröder E8 соединяются по шине CAN, к этому соединению есть определенные требования.
Если эти требования не выполнять, то может быть система будет работать.
Но, если что-то не работает, то прежде всего надо убедиться, что требования соблюдены
Топология
Все участники сети (в т.ч. SmartWeb, Kromschröder E8, Datalogger, Caleon и TM-E8) должны быть соединены друг с другом последовательно, в линейной топологии.
“Звездой”, “кругом”, “паутинкой” соединять нельзя.
Ответвления
Ответвления от основной “линии” длиной до 3 м — допустимы. Общая длина проводов не должна превышать 500 м.
Терминирующий резистор
На обоих концах линии должен быть терминирующий резистор 120 Ом, между проводами H и L.
На контроллерах SmartWeb резистор можно вставить в свободный парный порт шины CAN.
На контроллерах Kromschröder E8 резистор можно включить или выключить, используя настройку ТЕХНИК — СХЕМА — ИЗОЛ ШИНЫ.
Защита CAN-шины
Несмотря на то, что европейские производители не устанавливают защиту CAN-шины от всплесков напряжения на свои контроллеры, на практике в России это точно лучше делать. Для этого, воспользуйтесь модулем защиты CAN-Z.
Этот модуль также можно использовать и в качестве терминирующего резистора.
Кабели
Соединение «звездой»
Если “звезды” не избежать, то можно использовать следующую схему.
Так как обычно используется кабель с 4-мя витыми парами, можно использовать одну из них для прохода сигнала “туда”, а вторую для прохода сигнала “обратно”.
Таким образом, можно сохранить линейную топологию даже при физически проложенном кабеле “звездой”.
Ножевой микроразъем SmartWeb
На контроллерах SmartWeb обычно нет клемм для подключения CAN-проводов, вместо них там парный ножевой микроразъем.
Поэтому, в комплекте с каждым контроллером SmartWeb идет небольшой кусок провода, обжатого таким микроразъемом с одной стороны и свободными концами с другой стороны.
Для соединения контроллеров используйте следующую схему:
Кроме того, желательно найти на контроллере слаботочный минус (GND) и объединить этот минус с другими контроллерами сети CAN, отдельным проводом.
Клеммы Kromschröder
Полюсы “+” и “-” на клемме шины данных Кромшредера нужны только для питания Lago FB и BM8, но лучше всегда их прокладывать вместе с CAN-шиной, для объединения минусов и усиления питания на клемме «+».
“+” и “-” можно прокладывать по соседней витой паре с шиной данных.
Диагностика
При проблемах проверьте следующее:
Мост CAN-Ethernet-CAN
Вы можете объединить несколько групп контроллеров SmartWeb, находящихся в разных CAN-сетях, одной локальной сетью Ethernet. Для этого в каждой группе должно находиться по одному контроллеру DataLogger (или SmartWeb X).
Соответственно, такие контроллеры DataLogger должны находиться в одной сети Ethernet. В настройках DataLogger должна быть включена опция «Режим CAN-UDP моста».
Такая функция может пригодиться в том случае, когда нет возможности проложить кабель для шины данных CANbus, чтобы соединить контроллеры SmartWeb.
Пример
Например, требуется соединить два контроллера (две группы) SmartWeb при помощи радиоканальной связи. В этом случае потребуется два Wi-Fi-маршрутизатора.
Установите их в местах соединения контроллеров SmartWeb. Убедитесь, что эти маршрутизаторы могут быть соединены по Wi-Fi.
Разные маршрутизаторы имеют разную мощность радиосигнала, и, соответственно, разную дальность действия. В некоторых случаях для усиления сигнала может потребоваться дополнительное оборудование. Подключите к маршрутизаторам по одному контроллеру DataLogger. В свою очередь, к ним подключите контроллеры SmartWeb.
Аналогично можно объединить контроллеры SmartWeb уже имеющейся на объекте проводной локальной сетью Ethernet.
CAN или не CAN? Или зачем мне сеть микроконтроллеров?
Этот вопрос мне пришлось задать себе лет десять назад или больше. Работа, которую надо было сделать, заключалась в дарении второй жизни диспетчерскому щиту. Это такая штука во всю стену, состоящая из лампочек и выключателей с переключателями. Думаю, не ошибусь, предположив, что щиты стали делать с тех пор, как появились лампочки, поскольку выключатели к тому времени, наверняка, уже были известны. А тяга к прекрасному, вообще, пришла к людям из далекой древности.
Читайте также: Выкачанное из гаража колесо выкаченный из шины воздух замешенное
Сейчас многие предпочтут щитам дисплейные панели. Но будут ли любители дисплеев в большинстве, зависит от многого, нам неведомого. Но сейчас речь не об этом.
Каждый, кто может в течение пяти минут поддерживать разговор об электропроводке, сразу скажет мне, что щит состоит из плоских панелей, на которых размещены выключатели и лампочки, а также из ящика со множеством проводов. Ведь лампочка без проводов только для того и годится, чтобы ее или тупо разбить или, если подойти творчески и включить воображение, разместить у самого пытливого во рту и довольно быстро узнать, где находится травмпункт.
Все так и было, куча проводов, уходящих из ящика к выключателям и лампочкам, только лампочки — маленькие. Видимо, внучки знаменитой лампочки Ильича.
И вот, помнится, глянул за окно, а там 21-й век. Стало быть надо все делать заново и по-другому. Вместо лампочек — экономичные светодиоды. Вместо проводов — проводки. Вместо одного ящика — много-много маленьких ящичков, контроллеров, стало быть.
Оказалось, что если каждый контроллер сможет обслуживать четыре светодиода и два переключателя то это будет выглядеть оптимальненько. В смысле, не так ужасающе. А если через все контроллеры будет проходить шина питания и информационная шина, всего четыре провода, то появится некое изящество. Оказалось также, что контроллеров потребуется 104 штуки. По-хорошему, тут надо было бы поставить и решить задачу коммивояжера. И тогда, возможно, контроллеров потратили бы меньше. Но было не до хорошего.
К тому времени я уже знал, что такое CAN и уровень моего уважения к фирме Bosch был много выше, нежели у повара приличного ресторана или аккуратной домохозяйки. А производители автомобилей BMW, я уверен, даже ходили к инженерам Bosch в гости.
Controller Area Network, как сказали бы иностранцы, на мой взгляд, как техническое решение, возникло из желания сделать что-то, наконец, хорошо. Не скрою, все прелести результатов работы инженеров почувствуешь не сразу, как осилишь два тома стандарта, а значительно позже. Когда пообщаешься с очевидцами, опросишь свидетелей. Сейчас томов прибавилось, но, может быть, можно сразу начинать с третьего, поскольку, теперь оно называется CAN_FD. Однако, позвольте продолжить.
Еще до столкновения со щитом мне пришлось столкнуться с чужими инженерными решениями на тему использования CAN, а также наделать и своих ошибок. Ошибки обычно появляются в перерывах между чтением инструкций и изучением описаний. Хорошо, что только со второго раза они выглядят как грабли.
Теперь несколько тысяч слов для читателя, который терпимо относится к занудам и не считает их врагами.
CAN можно установить там, где раньше работал RS485 на витой паре. Витая пара — это не непременное условие, просто удобно сравнивать. Используя витую пару, по CAN, как и по RS485, можно передать сообщения от управляющего контроллера к подчиненному и получить ответ. Сходство бросается в глаза, но, давайте лучше остановимся на отличиях. Кое-какие из отличий могут нести знак минус для некоторых из читателей. Но им бы я посоветовал не огорчаться, а вспомнить закон Ломоносова.
Благодаря синхронной организации протокола разрешение коллизий на шине реализовано аппаратно, на лету, так сказать. Ниже отмечено, к чему это приводит и что это дает непоседливому инженеру.
Можно получить сообщение и без запроса.
Не надо ждать, когда ответ будет готов, можно спросить в это время еще кого-то.
Подчиненный контроллер тоже может спросить и получить ответ.
Из-за синхронной работы длина шины CAN обратно пропорциональна скорости передачи или типа того.
Максимальная скорость составляет 1 Мбод (10 — на подходе).
То, что сообщение не исказилось при передаче отправляющий знает сразу после последнего бита. Точнее, это знают все на шине.
Если сообщение исказилось для одного, попытка не засчитывается всеми.
Если сообщение удалось передать в шину, то абонент не получит его лишь при условии, что сломался.
Количество контроллеров на шине не должно превышать 127.
Читайте также: Датчик давления в шинах тойота прадо 120
Сообщения ограничены по длине. Они состоят из идентификатора, указателя длины в байтах и блока данных, именно с таким количеством байт, как указано. Есть еще несколько служебных битов, но о них пока помолчим, поскольку сервис должен быть ненавязчивым. Идентификатор может быть размером 11 или 29 бит. Блок данных может содержать от 0 до 8 байт (64 — на подходе).
Для конкретики приведу немного цифр. Если хочется работать на скорости 1Мбод, то длина шины не должна быть больше 35 метров (некоторые предпочитают 40, то есть, погорячее). Если необходимо передать что-то на расстояние до 8 км, то скорость не должна превышать 5 Кбод. Кстати, читатель вправе спросить, почему килобод, а не килобит? Потому, что не все боды становятся битами. Как-то так.
Как можно распорядиться всеми этими совсем не секретными ингредиентами? Те, кто во всем видят игру в кубики, сразу вспомнят, что есть такая замечательная вещь, как CANopen и еще много красивых сочетаний и аббревиатур и нечего изобретать велосипед. Таким мне часто хочется ответить: «Разве не похожа на велосипед та яичница из двух яиц, которую многие готовят себе на завтрак? Почему бы не сходить в общепит и не взять себе омлет?». Но я лучше промолчу и продолжу, не отвлекаясь на выкрики из зала.
В те времена, когда 29 битовый идентификатора еще не успели придумать, существовал только 11 битовый. Одни его стали использовать, чтобы запихнуть туда название (номер) нужного вида данных. Другие использовали как адрес контроллера, к которому обращаются. И то и другое имело смысл. Например, можно спросить так:
- А подай-ка нам, милейший, шато тринадцатого года в литровой бумажной упаковке.
Заверните мне, пожалуйста, то, что спрятано у вас на самой нижней полке справа.
Кстати, в CAN может сработать и такая конструкция:
Всем лежать! А ты быстро складывай все с полок мне в сумку.
Но этой конструкцией часто не попользуешься, поскольку после придется какое-то время ждать.
Ждать пока все ответы не выстроятся один за другим и не поступят в распоряжение запрашивающего контроллера. Мы уже ушли от кино, если что.
Меня в моем случае устроил бы вариант идентификатора в качестве адреса. Из 11 бит требовалось 7 и еще 4 оставалось на то, чтобы сделать одни сообщения более срочными по сравнению с другими, а также пометить часть контроллеров как главные.
Некоторое неудобство перекочевало сюда из RS485, а именно, адреса надо было устанавливать вручную на каждом контроллере. Затем проверять и переустанавливать. И, возможно, вернуться к предыдущему шагу и повторить.
К счастью, к тому времени уже существовали два обстоятельства.
Первое — уже появился 29 битный идентификатор. А второе то, что многие производители микроконтроллеров стали считать хорошим тоном условие, чтобы каждый чип имел свой уникальный и довольно длинный номер.
Теперь в длинном идентификаторе можно было 24 бита смело отвести для уникального адреса. Еще 5 оставалось, для заботы о том, чтобы поезда различались срочностью, направлением (туда, обратно), наличием вагона-ресторана и вагонов с повышенным комфортом.
Если перестать дурачиться и сделаться серьезным, назвать подчиненных контроллеров агентами, а остальных боссами, то можно составить таблицу. Она будет показана немного позже.
Читайте также: Размер шин для форд экоспорт
Еще немного про адресацию. Уникальный номер чипа, как правило, занимает количество битов значительно превышающее 24, например, 96 у STM32FXXX. Поэтому необходимо как-то получить 24 из 96. Я выбрал операцию XOR. Вы можете выбрать что-то другое, но небольшая проблема останется. Это совпадения адресов после редуцирования.
Вероятность появления этой проблемы крайне мала, но она есть. Она решаема, но добавляет работы наладчикам. Здесь надо вспомнить, что сообщения CAN могут не содержать данных совсем. Это нам и пригодиться при решении. Оно состоит из следующих действий.
Управляющий контроллер (босс) отправляет широковещательный запрос, на который должны ответить все агенты (это запрос с нулевым адресом). Ответные сообщения с нулевой длиной данных и совпадающими адресами не испортят друг-друга, а достигнут босса в виде одного.
Теперь останется подсчитать сколько получено ответов и сколько их должно быть. Если эти два числа совпадают, значит все в порядке. Если ответов меньше чем контроллеров, то налицо совпадение адресов и наладчикам есть работа. А если ответов больше, нежели контроллеров, то надо подумать о диссертации, поскольку, вы — на пороге открытия.
Если изменение длины сообщения рассматривать как некоторые вариации его смысла, то можно получить дополнительные возможности, о которых позже расскажу, если мама не позовет кушать.
Еще из интересного, если использовать и короткие и длинные идентификаторы одновременно, то можно получить, например, адресацию групп или частично широковещательные запросы. Но не будем пока углубляться.
Вернемся к кодированию идентификатора.
Для целей адресации в расширенном идентификаторе отведено 24 бита, а в стандартном – шесть. Адрес со значением 0x000000 является широковещательным для расширенного идентификатора. Для стандартного идентификатора нулевой адрес (6 его бит) также считается широковещательным. Пять начальных (старших) битов в длинном и коротком идентификаторе, называются заголовком, влияют на смысл сообщения и обозначаются буквами NVADR:
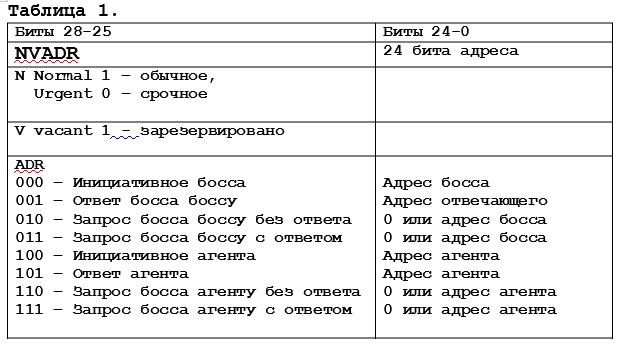
Конечно, для диспетчерского щита потребовалось реализовать только часть этой схемы. В первом проекте со щитом (или на щите, как правильно?) использовались чипы Cortex от NXP, а в следующих проектах (были и такие) уже применялись M0 от STMicroelectronics.
Пару слов об использовании коротких идентификаторов. Те шесть бит, которые отводятся для адресации, адресуют не контроллер, а группу. Эта группа при старте сначала у всех нулевая. Далее производится конфигурирование агентов, после которого часть из них или все становятся принадлежащими своей группе. Теперь запросом к группе, мы получаем ответы тех агентов, которые мы собрали в эту группу.
Теперь, немного о том, что добавляется, если по-разному трактовать сообщения с различной длиной данных. Например, запрос с нулевой длиной хорошо помогает при отладке, как уже упоминалось выше. Запрос с длиной 3 обслуживает пространство байтовых переменных размером 16384. Запрос с длиной 4 делает то же самое, но предназначен для агента-шлюза, который обслуживает CAN шину второго уровня. Эта шина может состоять из одного-двух агентов, зато удаленных на пару километров.
Запрос с длиной 5 и 6, аналогично, предназначены для пространства двухбайтовых переменных размером 4194304. Два бита используются не для адресации. Один бит управляет записью-чтением. Другой сигнализирует об ошибке.
Далее 7 и 8 обслуживают четырех байтовые слова. Их тоже 4194304.
Эти пространства являются общими для всех агентов. Каждый из них, в зависимости от предназначения, использует только отрезок пространства переменных. Контроллер для измерения температуры в двух точках представлен на фото. Это для отладки и тестирования.
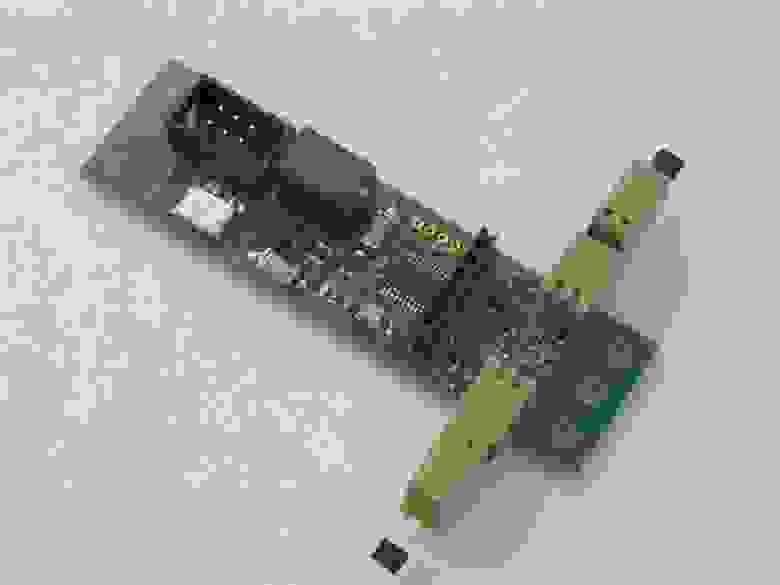
Соединяются контроллеры плоским шлейфом на 6 жил. На питание идут сдвоенные. Микросхема о двадцати ногах — это STM32F042.
С обратной стороны присутствует MAX3051, формирователь CAN в корпусе SOT23-8.
Ну вот, мама кушать зовет.
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле