Интерфейс Inter-Integrated circuit или I2C на сленге часто называют «квадратная шина». Такая периферия имеется на контроллерах STM8 и STM32. Не будем кривить душой, но при разработке этой периферии инженеры компании STMicroelectronics неплохо отдохнули, подкинув работы тем, кто пишет Errata (отклонения в работе кристалла). Тем не менее, периферия вполне пригодна для использования. STMicroelectronics рекомендует использовать библиотеку CPAL для работы с этим интерфейсом. Функции библиотеки обходят все ограничения кристалла.
Библиотеку CPAL, а также инструкцию по её использованию можно скачать на форуме.
Стоит отметить, что в последних микроконтроллерах STM32F05 (и вероятно STM32F3) Errata на данную периферию практически отсутствует.
Тем не менее, инженеры компании «Промэлектроника» решили поломать свои копья на «квадратной шине». После создания стека управления интерфейсом I2C, его испытали боем, подключив последовательную память EEPROM типа M24 и часы реального времени M41T62.
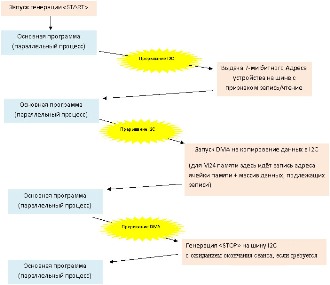
Результат – стабильная работа «квадратной шины» с, практически, параллельной работой ядра над другими задачами. Это стало возможным благодаря использованию контроллера прямого доступа к памяти и прерываний. Ниже показано, как работает стек обмена данными по интерфейсу I2C.
Исходники стека, а также надстройки для работы с последовательной EEPROM типа M24 выложены на форуме.
Стек написан под семейство STM32F1. Его легко адаптировать под другое семейство. Кроме того, стек использует 7-ми битную адресацию устройств на шине I2C. Исправление одной/двух строк позволит использовать 10-ти битную адресацию.
Пример реализует программное соединение
- STM32F103VBT6
- M24C01-WDW6TP
- M41T62
За получением более подробной информации вы можете обратиться:
Бренд-менеджер:
Сорокин Сергей
E-mail: info@promelec.ru
Телефон: +7 (343) 245-68-20
Задать вопрос техподдержке вы можете на нашем форуме.
Последние новости — одной лентой:
Видео:03. Основы устройства компьютера. Память и шина. [Универсальный программист]Скачать
![03. Основы устройства компьютера. Память и шина. [Универсальный программист]](https://i.ytimg.com/vi/mjiJutISb6U/0.jpg)
I²C — Inter-Integrated Circuit, краткое руководсто
Видео:CAN шина👏 Как это работаетСкачать

Общие сведения:
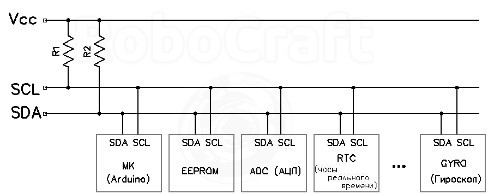
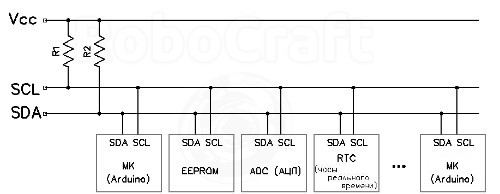
I²C (и-квадрат-це, ай-ту-си, ай-сквэрд-си), Inter-Integrated Circuit — последовательная шина обмена данными между интегральными схемами. Изобретена и в начале 80-х компанией Philips Semiconductor (теперь NXP), передача данных осуществляется по двум проводам в обе стороны. Ведущий и ведомый могут выполнять как роль приёмника, так и передатчика. Для возможности соединения более двух устройств используются адресация. Опрашивать адреса шины может только ведущий. Адрес последовательно выводится на линию SDA сразу после сигнала Start. В этой статье речь пойдёт только о 7-ми битной адресации, так же не будет затронута тема нескольких ведущих. На каждом устройстве, поддерживающем I²C обычно обозначены два вывода: SDA и SCL. SDA (serial data) — означает последовательные данные, SCL (serial clock) — последовательное тактирование. Эти выводы являются выводами открытого коллектора или открытого стока, это означает что ведущий и ведомый могут только притягивать электрический потенциал к земле, поэтому на каждой линии должны быть подтягивающие резисторы. Сопротивление резисторов рассчитывается в зависимости от паразитной ёмкости линии.
Видео:Конструкция шиныСкачать

Подключение:
Шина поддерживает подключение до 112 устройств (при 7-ми битной адресации) по двум проводам (плюс GND и Vcc), может иметь несколько ведущих и ведомых. При использовании нескольких ведущих, каждый из них должен поддерживать этот режим и уметь определять состояние занятой шины.
I²C на Arduino
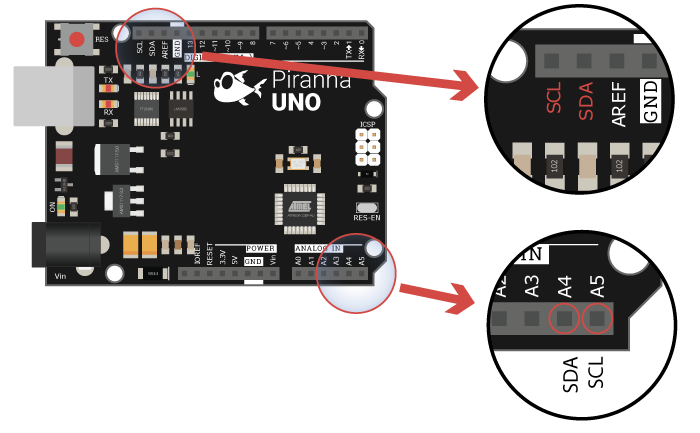
Arduino UNO R3/Piranha UNO
На Arduino UNO R3/Piranha UNO шина I2C находится на выводах A4, A5. Также в эти выводы продублированы на колодке с цифровыми выводами рядом с кнопкой Reset.
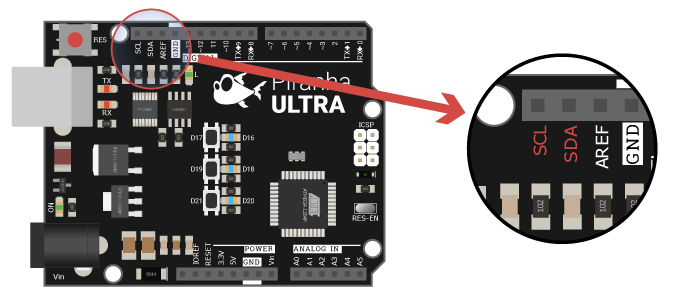
Piranha ULTRA
На Piranha ULTRA шина I²C не занимает аналоговые выводы A4, A5 и находится на цифровой колодке рядом с кнопкой Reset, выводы обозначены SDA и SCL
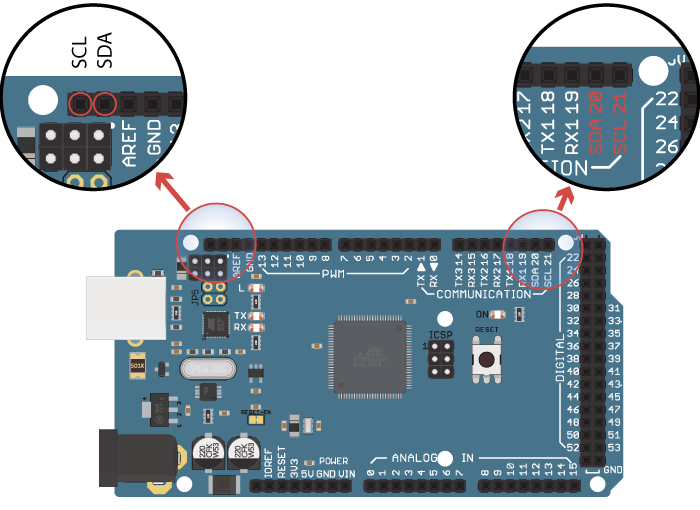
Arduino MEGA R3
На Arduino MEGA R3 шина I²C находится на цифровой колодке на крайних выводах, близких к разъёму USB и на выводах 20, 21. Выводы объединены.
Примеры для Arduino
Работа с шиной с использованием встроенной библиотеки Wire Arduino IDE на примере Trema-модуля LED Матрицы 8×8 — i2c
В этом примере на матрицу выводится изображение стрелки. Стоит заметить, ко всем нашим модулям написаны библиотеки с высокоуровневым интерфейсом и вовсе не обязательно работать с матрицей на низком уровне. Подробнее о работе с библиотекой матрицы можно узнать по этой ссылке.
I²C на Raspberry Pi
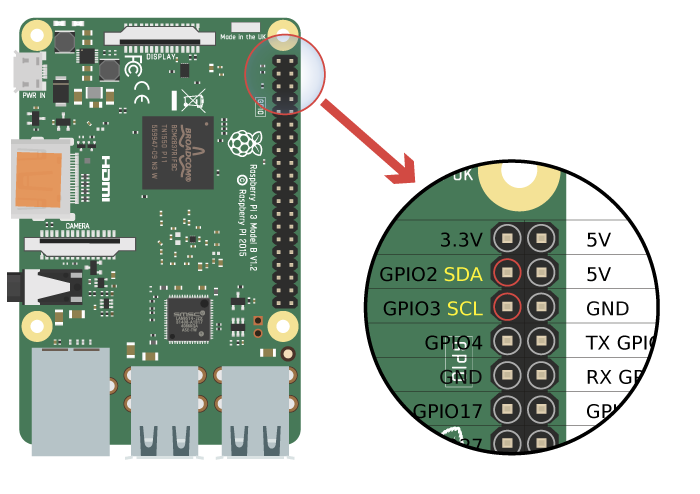
На Raspberry Pi I²C выводы это 3-й и 5-й выводы колодки, GPIO2 и GPIO3 по номенклатуре BCM и выводы 8, 9 по номенклатуре WiringPi.
Примеры для Raspberry
Работа с шиной с использованием модуля smbus для Python на примере Trema-модуля Матрицы 8×8 — i2c. Для работы с шиной её необходимо включить в настройках Raspberry при помощи утилиты raspi-config . Ссылка на подробное описание как это сделать.
Так же как и в примере с Arduino, в этом примере на матрицу выводится изображение стрелки. Стоит заметить, к Trema-модулю LED Матрица 8×8 — i2c написана библиотека с высокоуровневым интерфейсом и вовсе не обязательно работать с матрицей на низком уровне. Подробнее о работе с библиотекой матрицы можно узнать по этой ссылке
Читайте также: Tucson горит давление в шинах
Видео:Левые и правые шины. Асимметричные и направленные. Разница?Скачать

Подробнее о шине I²C:
Резисторы, ёмкость и длина линий шины
В официальном описании от NXP ничего не сказано о максимальной длине шины, но не стоит этим злоупотреблять. Шина была придумана для обмена информации между интегральными схемами в пределах одной платы одного устройства. В расчёт бралась только паразитная ёмкость линии, которая сказывается на скорости нарастания фронта волны. От этой ёмкости зависит номинал подтягивающих резисторов. Можно подобрать резисторы так, чтобы фронт волны нарастал согласно спецификации и при 100-метровой длине проводов, но это не избавляет от помех, которые влечёт за собой несимметричная электрическая реализация. Опять же, при слишком маленьком сопротивлении качество сигнала улучшается, но при этом растёт ток который необходимо пропускать устройствам через выводы для притяжки линий.
При использовании шины на модулях не существует принятого стандарта установки подтягивающих резисторов на ведущем или ведомом. У Arduino подтягивающие резисторы отсутствуют и для работы с шиной нужен хотя бы один модуль с ними. У Raspberry Pi на плате установлены подтягивающие резисторы номиналом 1,7 килоОм и для неё нет необходимости в подтяжке на модулях.
Сигналы и специальные биты шины
В состоянии покоя линии шины находятся на верхнем потенциале (обычно 3,3 В или 5 В, но могут быть и другие напряжения). Бездействие устройства, по умолчанию, воспринимается как логическая 1. Для простоты понимания можно рассмотреть аналогию: Вообразим верхний потенциал как уровень воды, а нижний как дно. Представьте, что Вы на рыбалке — попловок в состоянии покоя остаётся на поверхности, когда клюёт — идёт ко дну. Так же и в здесь, при обмене данными линии прижимаются в нулевому потециалу. Далее рассмотрим поочереди сингалы и специальные биты.
Устанавливаемые только ведущим
- Start — сигнал начала обмена данными. Линия тактирования SCL отпущена (логическая 1), ведущий пижимает линию данных SDA (переход из логической 1 в логический 0). После этого обмен данными происходит побайтово. Первый байт — семь бит адреса ведомого и бит направления (запись или чтение). Последующие байты — данные. после этого сигнала шина считается занятой.
Краткое обозначание сигнала S — заглавная буква S латинского алфавита.
- Бит Read — Если ведущий желает получить данные, он устанавливает логическую 1 сразу после адреса, информируя ведомого о том, что данные будут считываться (управление линией данных передаётся ведомому).
Краткое обозначание R — заглавная буква R латинского алфавита.
- Бит Write — Если ведущий желает записать данные, он устанавливает логический 0 сразу после адреса для информирования ведомого о том что данные будут записываться (управление линией данных остаётся у ведущего).
Краткое обозначение W̅ — заглавная буква W латинского алфавита с чертой сверху.
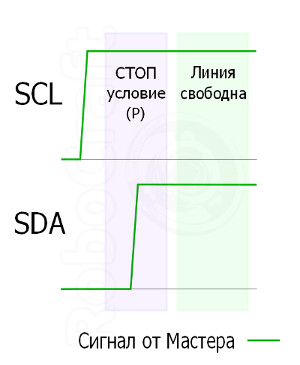
- Stop — сигнал окончания обмена данными. Ведущий прекращат тактирование, линия тактирования SCL отпущена (логическая 1), линия данных SDA переведена ведущим из логического 0 в логическую 1. После этого сигнала шина считается свободной.
Краткое обозначение P — заглавная буква P латинского алфавита.
- Restart — сигнал продолжения обмена данными (используется взамен сигналу Stop с последующим Start для продолжения опрашивания шины ). Используется в основном при наличии нескольких ведущих на шине, чтобы управление не перешло другому ведущему после сигнала Stop. Линия тактирования SCL отпущена ведущим, линия данных SDA переведена ведущим из логической 1 в логический 0.
Обозначается Sr — заглавная буква S и строчная буква r латинского алфавита.
Устанавливаемые ведущим и ведомым
Данные биты может устанавливат как ведущий, так и ведомый. В такой ситуации устанавливающее устройство или модуль (ведущий или ведомый) называют передатчиком, а считывающее устройство — приёмником.
- Бит ACK — (сокращ. англ. acknowledged — подтверждено) каждый девятый импульс тактирования передатчик (ведущий или ведомый) отпускает линию данных. Если линия была прижата приёмником (логический 0) — принятые данные верны, передача может быть продолжена или закончена.
Обозначается A — заглавная буква A латинского алфавита
- Бит NACK — (сокращ. англ. not acknowledged — не подтверждено) каждый девятый импульс тактирования передатчик (ведущий или ведомый) отпускает линию данных. Если линия была отпущена принимающим или принимающего нет на шине (логическая 1) — принятые данные неверны, произошла ошибка, передача не может быть продолжена. Обозначается A̅ — заглавная буква A латинского алфавита с чертой сверху.
Видео:Котика ударило током, 10 т. ВольтСкачать

Обмен данными
При обмене данными тактированием занимается только ведущий, а ведомый может удерживать линию тактирования только если не успевает за ведущим, так называемое растягивание тактирования (clock-stretching). Не все модули поддерживают удержание. Установка бита на линии данных может происходит в момент, когда линия тактирования прижата, а считывания, когда линия отпущена (подтянута к Vcc), но в большинстве случаев это происходит по фронту волны на линии тактирования.
Читайте также: Зимние шины cordiant polar 2 pw 502 шип
Рассмотрим пример простого обмена данными:
Запись в регистры ведомого. Данные взяты из примеров, приведённых выше.
После сигнала Start и указания адреса ведущий записывает адрес регистра с которого будет производиться дальнейшая запись. Стоит заметить, что у ведомого есть внутренний счётчик и каждый последующий байт после подтверждения будет записан в следующий регистр. Таким образом байт со значением 0x00 будет записан в регистр 0x11, байт со значением 0x18 будет записан в регистр 0x12, байт со значением 0x3C будет записан в регистр 0x13 и т. д. В этом примере биты ACK устанавливает ведомый.
Вот так сигналы этого примера выглядят на осциллографе:

- Канал 1 — тактирование (SCL)
- Канал 3 — данные (SDA)
- Линия B1 — декодирование данных осциллографом
Чтение из регистров ведомого. Предположим, мы хотим прочитать байт из регистра 0x13.
После сигнала Start и указания адреса ведущий записывает адрес регистра, который необходимо прочитать. Далее следует сигнал Restart (или Stop, затем Start). Ведущий снова выводит адрес ведомого, но уже с битом Read (чтения). Ведомый устанавливает бит ACK и во время следующих 8-ти импульсов тактирования выводит данные на линию SDA. На девятом импульсе уже ведущий устанавливает бит ACK (или NACK, если данные не удалось прочитать) и завершает обмен сигналом Stop.
Видео:г.КалмыкияСкачать

Скорость
Первоначальный стандарт I²C был реализован на скорости 100 кГц. С тех пор появились и другие реализации шины, но большинство устройств работают на этой скорости. Так же известны случаи когда скорость шины специально снижена, чтобы увеличить расстояние передачи и уменьшить чувствительность к помехам. Не все модули могут работать на сниженной скорости.
Наконец, подобрались к I2C. Давно хотелось, но всё никак. Тема интересная, а возможности периферии общающейся по этому протоколу могут существенно расширить возможности микроконтроллерной системы. I2C, в отличии от SPI , позволяет наращивать функционал, добавлять новые блоки без изменения в схеме и не задействуя новые выводы МК — настоящий конструктор — стыкуй что и сколько надо =)
I2C (Inter-Integrated Circuit — примерно «Схема внутренней связи» =), читается “и-два-цэ” — последовательная шина выдуманная в недрах Philips ещё в 80-х годах прошлого века. Задумывалась, как простая шина для связи блоков внутри устройства — получилось, и на удивление удачно=)
Сегодня, каждый производитель выпускающий МК уровнем чуть выше нулевого суёт туда аппаратный I2C, правда Philips запатентавал название и до 2007 года все выдумывали своим велосипедам имена кто во что горазд: у ATmega, например, этот модуль завётся 2-wire Serial Interface.
Производители законченных блоков и модулей, зачастую, используют именно I2C для общения с внешним миром (блоки телевизоров, магнитол, дисплеи, некоторые камеры в мобильных телефонах и т.п.), а микросхем периферии вообще на любой вкус: АЦП/ЦАП памяти разнообразные, часы реального времени, расширители вводо-выводов, гироскопы, акселерометры, компасы, драйверы светодиодов и матриц, ШИМ-контроллеры, синтезаторы частот и вообще, по-моему, всё что душе угодно.
Затыков у этой чудо шины два: скорость работы и ограничение на число адресов в сети.
Классически это 100 кбит/с и 128 устройств.
Но стандарт 1992 года предусматривает скорости как 100 кбит/с (low-speed), так и 400 кбит/с (fast-speed) и уже 10-битную адресацию т.е. максимум — 1203 адреса.
А стандартом от 1998, раскрутили аж до 3.4 Мбит/с (Hs-mode).
Но производители живут в прошлом веке и заглянув в датащит на атмеги увидим, что модуль 2-wire Serial Interface может раскочегарится до 400 кГц и адресовать только 127 устройств =\
Так же, есть зарезервированные 8 служебных адресов, так что, на деле, устройств может быть только 120.
Ну и хрен с ними, мне лично — за глаза, да и мороки с этим Hs-mode значительно.
Адреса, обычно, жёстко “прошиты” в микросхему (см. датащиты), но частенько несколько бит адреса “выводят” на ножки — перемычками (на питание или землю) можно задать эти биты и подключить несколько одинаковых микросхем на одну шину.
Физически, шина I2C представляет собой два провода (не считая земли и питания =), притянутые к плюсу резисторами 1-10к (так и только так!).
Один провод — шина данных(SDA — Serial DAta), второй — тактирование(SCS — Serial CLock).
И всё!
Работает тоже почти бесхитростно:
На линии обычно есть один Мастер (Master) — МК и некоторое количество Слейвов (Slave) — периферийных устройств (возможна и многомастерная “архитектура”, но об этом позже).
Так как линии у нас подтянуты к питанию, то устройствам остаётся только прижимать их к земле, когда хочется передать нолик и просто отпустить — чтоб единицу.
Отсюда важный вывод о совместной работе устройств с таким включением (называется — монтажное “И”) — если кто-то выставил ноль — остальным придётся с этим смириться =)
Итак, тактирование (дрыганье SCL) всегда осуществляет мастер, передачу начинает тоже всегда он, предварительно уточнив, что линия свободна (единички на SDA и SCL), формирует СТАРТ-условие (S) — прижимает линию SDA (1->0), при еденице на SCL,
Потом, надо передать адрес того устройства к которому мы хотим обратиться.
При передаче по I2C есть два правила:
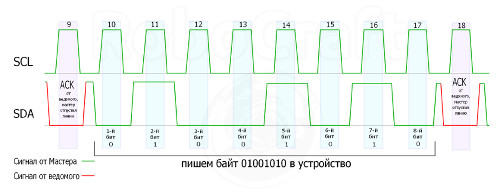
Во-первых, данные считываются только при единичном состоянии SCL, а меняться могут, только при нулевом состоянии SCL (выставили-держим-протолкнули-выставили следующий-держим-. ).
Во-вторых, данные идут головой вперёд — начиная со старшего бита(MSB)

7 битов адреса, восьмой — признак R/W — если хотим читать 1, записать 0.
Прожевав восьмой бит, ведомая микросхема должна сказать уверенное “Ага”, если всё понятно — послать сигнал подтверждения (ack, acknowledge) — прижав линию SDA (отпущенную ведущим) на время 9-го такта на SCL. Мастер с интересом это дело выслушает (и тактично подождёт если туговатая микросхема не сразу отпустит SDA)
Если ack нет (называется nack) — значит ведомому что-то не понятно, тогда нужно(можно) сформировать СТОП и повторить передачу.
Затем, мастер либо посылает байт данных слейву, и снова дожидается подтверждения,
либо принимает от него байт и уже сам выдаёт подтверждение. Байт данных может быть несколько, но все они когда-нибудь закончатся, и мастер должен будет сформировать СТОП-условие(P). Для этого надо отпустить линию SDA (0->1), не трогая SCL.
полный “текст” обращения (кликабельно):

Всё просто=)
СТАРТ-адрес(запись/чтение)-подтверждение-данные-подтверждение-СТОП

А если мастер читал данные, то, прочитав последний интересующий байт должен вместо последнего asc передать nack. Только такое вот, невежливое, завершение диалога понимает многие (или все? — см. датащиты) периферийные микросхемы.

Так же, туговатая микросхема может придерживать линию SCL, демонстрируя, что не успевает глотать недожёванное, так что, перед подачей очередного такта, мастер должен проверить свободно ли, и если нет — подождать.
Есть ещё такой режим — комбинированный. Это когда мастер, прочитав что-нибудь, не освобождая линию,(не формируя СТОП) генерит прям сразу ещё один СТАРТ и лезет писать. Такой хамский старт называется повторным — ПОВСТАРТ (repeated Start, Sr). Делается это, обычно, для указания «внутреннего» адреса периферийной микросхемы — например: послали адрес EEPROM-ины, сказали что намерены читать, потом ПОВСТАРТ и адрес ячейки откуда хотим считать 
Читайте также: Шины для мотоцикла восход 3м
Есть ещё режим много-мастерной(multi-master) работы — тут сильно выручает соединение “монтажное И”.
А для реализации, непосредственно демократии, на шине действуют ещё и правила джунглей синхронизации и арбитража. Эти правила построены на непрерывном самоконтроле мастерами результатов своей деятельности — отпустит линию — и тут же смотрит — отпустилась? Если — отпустилась, то всё хорошо и он тут пока главный, если нет (кто-то держит линию) — есть мастера потолще, надо свалить.
Естественно, каждый мастер перед началом бурной деятельности по раздаче команд и чтению данных проверяет не занимает ли линию кто-нибудь столь же мастеровитый, и если занимает то тактично ждёт просветов.
А если одновременно, сразу несколько, посмотрели — свободно — воздуха побольше набрали и давай… вещать?
Тут они начинают мериться=)
Во-первых, тактирование. Естественно, все мастера ломанутся дёргать SCL самостоятельно, они ж мастера=) Вот только пока самые резвые (начавшие первыми) сгенерировав первый такт, отпустят линию — более тормозные и неторопливые будут её держать, отпуская по одному, пока не найдётся самый главный тормоз — начавший вещать последним, он то и продолжит, а остальные останутся нервно ждать.
Но, может так случится, что два особо однояйцевых мастера синхронно сгенерят СТАРТ условие. Тогда опять начнётся затяжной заплыв с мериньем. Будут гнать в линию SDA свои нолики и единицы синхронно, пока не обнаружится разница в задуманном — тот кто захочет выставить единицу будет традиционно обломан тем, кто решил в этот момент послать нолик. Обламавшийся перейдёт в ожидание, а тот кто сказал 0 первым — продолжит.
В общем, “0” в I2C решает, на этом всё и держится =)
Дополнительно, для погружения в тему, рекомендую книжку:
Семёнов Б.Ю. «Шина I2C в радиотехнических конструкциях»
А также, перевод стандарта
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле
📹 Видео
Кан шина, что это? Поймет школьник! принцип работыСкачать

Лекция 308. Шина I2CСкачать
Введение в шину I2CСкачать
LIN шина - пример работы. LIN bus exampleСкачать
Как работает АВР 6 кВ?Скачать
Для энергетиков. КРУ-6кВ и выключатель ВЭМ-6.Скачать
лекция 403 CAN шина- введениеСкачать
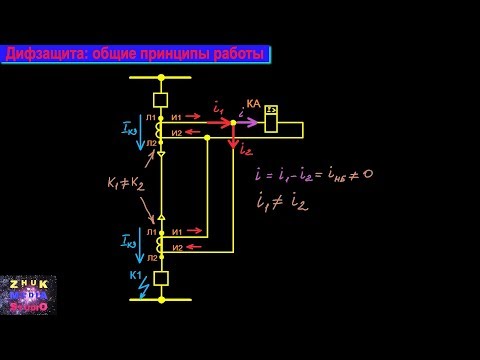
Дифференциальная защитаСкачать
Одна, секционированная выключателем, система шин 6-10 кВ (схема 6(10)-1)Скачать
Подробно про CAN шинуСкачать
Зачем нужны низкопрофильные шиныСкачать
КВАДРАТНЫЕ КОЛЕСА на ПОДШИПНИКАХ с ГУСЕНИЦАМИСкачать
ДЗШ 110кВ на ПС 220/110/10кВСкачать
Логический анализатор шины i2cСкачать