
При наличии достаточной силы сцепления между шиной и дорогой эластичное колесо, нагруженное поперечной силой, может катиться без скольжения под некоторым углом к своей средней продольной плоскости. Такое качение называется уводом колеса, а угол, образованный вектором скорости центра колеса с этой плоскостью, – углом увода колеса δув.
Угол увода колеса можно определить по формуле:
 | (9.4) |
где kув – коэффициент сопротивления уводу колеса, Н/рад, показывающий, какую по величине силу нужно приложить к колесу, чтобы оно катилось с углом увода, равным 1 рад.
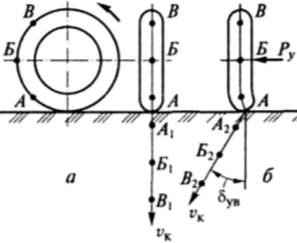
Рисунок 9.2 – Качение эластичного колеса при отсутствии (а) и действии (б) боковой силы
Поворачиваемость – свойство автомобиля изменять направление движения без поворота управляемых колес. Основные причины поворачиваемости: увод колес, вызываемый эластичностью шин; поперечный крен кузова, связанный с эластичностью подвески автомобиля. В зависимости от соотношения углов увода передних и задних колес (мостов) автомобиль может иметь нейтральную, недостаточную и излишнюю поворачиваемость.
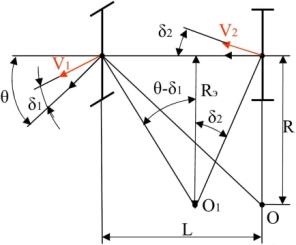
Нейтральная поворачиваемость характеризуется тем, что углы увода передних и задних колес равны (δ1 = δ2), и, следовательно, Rэ = R. Однако траектории движения автомобиля с жесткими шинами не совпадает с траекторией движения автомобиля с эластичными шинами (рис. 9.3, а). В этом случае вследствие увода центр поворота находится не в точке О, как у автомобиля с жесткими шинами, а в месте пересечения перпендикуляров к векторам скоростей переднего и заднего мостов (точка О1).
 а а | 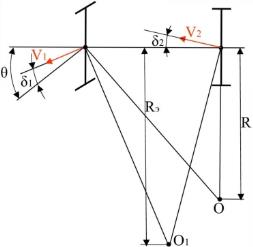 б б | 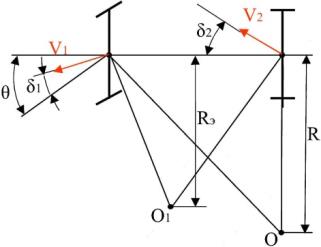 в в |
Рисунок 9.3 – Схемы движения автомобиля с различной степенью поворачиваемости: а – нейтральная; б – недостаточная; в – избыточная
Недостаточная поворачиваемость характеризуется тем, что угол увода передних колес больше, чем угол увода задних колес (δ1 > δ2), и Rэ > R. Для движения автомобиля с недостаточной поворачиваемостью по траектории заданного радиуса управляемые колеса необходимо повернуть на больший угол, чем при жестких колесах (рис. 9.3, б). Следовательно, автомобиль с недостаточной поворачиваемостью безопасен при движении на повороте, так как у него имеется некоторый резерв «подруливания».
Излишняя поворачиваемость характеризуется тем, что угол увода передних колес меньше, чем угол увода задних колес (δι δ2 имеет отрицательное значение.
Для количественной оценки шинной поворачиваемости автомобиля применяют коэффициент поворачиваемости ηпов, равный:
 | (9.6) |
При излишней поворачиваемости (ηпов > 1), при нейтральной – (ηпов = 1), а при недостаточной – (ηпов
Дата добавления: 2016-02-27 ; просмотров: 8407 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Видео:Что такое сопротивление качению шинСкачать

Устройство автомобилей
Видео:Шины гоночного автомобиля, часть 2 | А.Плахотниченко, Осенняя школа Формулы Студент 2020Скачать

Увод колеса и поворачиваемость автомобиля
Увод колеса
При прохождении автомобилем поворота возникающая боковая сила Ру действует на весь автомобиль, в том числе и на колеса, которые находятся в контакте с дорогой. Поскольку колеса снабжены эластичными шинами, то боковая сила Ру вызовет деформацию шин в зоне контакта колес с дорогой.

Допустим, что к оси равномерно и прямолинейно катящегося колеса приложена боковая сила, перпендикулярная плоскости его качения (рис. 1). Под действием этой силы в плоскости дороги возникает равная ей боковая реакция Rу . В результате совместного действия сил Ру (приложенной к центру тяжести автомобиля) и Rу (приложенной в зоне контакта колес с дорогой) происходит деформация упругой шины. Деформируется и беговая дорожка.
Если бы не было деформации шины, то беговая дорожка оставляла бы на плоскости качения колеса прямолинейный след аб , являющийся линией пересечения плоскости качения колеса с плоскостью дороги. Однако в результате боковой деформации шины точки следа получают смещение, и линия следа аб будет наклонена к линии аб под некоторым углом δув , называемым углом увода .
Читайте также: Датчик давления в шинах kia soul 2021
Отклонение вектора скорости эластичного колеса от плоскости его вращения при действии любой по величине боковой силы называется боковым уводом (или просто уводом), а угол между этим вектором и плоскостью вращения колеса – углом увода.
Боковая сила, вызывающая увод, может быть связана с углом увода соотношением:
где kув – коэффициент сопротивления уводу, показывающий какую по величине поперечную силу надо приложить к колесу, чтобы оно катилось с углом увода, равным 1 рад.
Для малых углов увода (до 6˚) коэффициент kув приближенно можно считать постоянным. Для легковых автомобилей kу изменяется от 15 до 40 Н/рад, а для грузовых автомобилей и автобусов – от 30 до 100 Н/рад.
Коэффициент kув можно считать постоянным лишь приближенно. Увеличение вертикальной нагрузки и давления воздуха в шинах сопровождается повышением сопротивления уводу.
При возникновении увода происходит деформация шины в радиальном и поперечном направлении, в результате чего возрастает внутреннее трение в шине. При дальнейшем увеличении углов увода начинается скольжение протектора по дороге. Результатом этого является то, что сила, необходимая для качения колеса с уводом должна быть больше, чем для его качения без увода.
Увод колеса без скольжения по дороге возможен лишь до тех пор, пока боковая сила Ру , приложенная к колесу, не превысит его сцепные возможности.
Поворачиваемость автомобиля
Свойство автомобиля изменять направление движения без поворота управляемых колес называется поворачиваемостью автомобиля. Поворачиваемость проявляется в результате бокового увода колес вследствие эластичности шин или поперечного крена кузова вследствие эластичности упругих элементов подвески. Поэтому различают поворачиваемость шинную и креновую.

Если в автомобиле с жесткими шинами центр поворота находится в точке О (рис. 2) пересечения продолжения осей передних и задних колес, то у автомобиля с эластичными шинами центр поворота будет находиться в точке О1 пересечения перпендикуляров к векторам скоростей v1 и v2 переднего и заднего мостов. Тогда можно записать:
где δ1 и δ2 – углы увода соответственно переднего и заднего мостов;
ρэ – радиус поворота автомобиля с эластичными шинами;
L – база автомобиля.
Так как углы θ , δ1 и δ2 обычно невелики, то можно записать:
Для автомобиля с жесткими шинами углы увода равны нулю: δ1 = δ2 = 0, и для радиуса поворота справедлива формула:
где ρ – радиус поворота автомобиля с жесткими шинами.
Таким образом, траектория движения автомобиля с жесткими шинами зависит только от угла θ поворота управляемых колес. У автомобиля с эластичными шинами на нее влияют углы δ1 и δ2 . Кривизна траектории зависит от соотношения углов δ1 и δ2 .
Если δ1 = δ2 , то это называется нейтральной поворачиваемостью .
При этом, согласно формуле (3) ρэ = ρ , однако траектория движения автомобиля с эластичными шинами не совпадает с траекторией движения автомобиля, имеющего нейтральную поворачиваемость, так как центры поворота в этих случаях занимают разные положения.

При действии поперечной силы на автомобиль с жесткими шинами он будет сохранять свое прежнее направление движения, пока обеспечивается его устойчивость по сцеплению колес с дорогой. Автомобиль же на эластичных шинах с нейтральной поворачиваемостью при действии боковой силы будет двигаться прямолинейно под углом δув к прежнему направлению движения.
Читайте также: Давление шин 15 радиус шевроле лачетти
Если δ1 > δ2 , то ρэ (рис. 3, б), и для движения автомобиля с эластичными шинами по кривой радиусом ρ управляемые колеса нужно повернуть на больший угол, чем при жестких шинах.
В этом случае имеет место недостаточная поворачиваемость .
Если δ1 δ2 , то ρэ > ρ (рис. 3, в), и для движения автомобиля с эластичными шинами по кривой радиусом ρ управляемые колеса нужно повернуть на угол, меньший, чем при жестких шинах, т. е. наблюдается излишняя поворачиваемость .
Чтобы понять влияние различных видов поворачиваемости на устойчивость автомобиля, рассмотрим воздействие на автомобиль боковой силы Ру в случае, когда угол поворота управляемых колес равен нулю: θ = 0.
В случае нейтральной поворачиваемости (рис. 3, а) автомобиль будет двигаться под углом δув = δ1 = δ2 к траектории своего прежнего движения.
В случае недостаточной поворачиваемости (рис. 3, б) в результате того, что углы уводов переднего и заднего мостов различны, будет действовать центробежная сила Рц из центра О1 поворота автомобиля, при чем она будет направлена в противоположную сторону возмущающей боковой силе Ру , что уменьшит ее и, как следствие, произойдет увод колес.
Следовательно, автомобиль с недостаточной поворачиваемостью устойчиво сохраняет прямолинейное движение.
В случае излишней поворачиваемости (рис. 3, в) будет действовать центробежная сила из центра поворота О1 , но в данном случае ее направление будет совпадать с направлением боковой силы Ру , что вызовет еще больший увод колес с изменением траектории движения. Поэтому автомобиль с излишней поворачиваемостью менее управляем и хуже сохраняет направление движения, чем автомобиль с недостаточной поворачиваемостью.
Креновая поворачиваемость автомобиля зависит от конструкции подвески. На рис. 4 показан задний мост с подвеской на листовых полуэллиптических рессорах, который поворачивает направо. Передние концы рессор соединены с кузовом простым шарниром, а задние – при помощи серьги.

Под действием поперечной силы Ру кузов автомобиля наклоняется, вызывая сжатие левых рессор и распрямление правых. Левая рессора, сжимаясь, перемещает задний мост назад (в точку А ), а правая распрямляясь перемещает его вперед (в точку В ). В результате задний мост поворачивается в горизонтальной плоскости.
Если вследствие крена углы поворота переднего и заднего мостов неодинаковы по величине и направлению, то автомобиль поворачивает, хотя передние колеса относительно балки моста не повернуты. Так, при действии одной и той же силы Ру один автомобиль (рис. 5, а) повернет вправо, а второй автомобиль (рис. 5, б) – влево.
Возникающая при повороте центробежная сила Рц у первого автомобиля направлена противоположно возмущающей силе Ру , а у второго автомобиля – в ту же сторону, что и Ру . Поэтому первый автомобиль лучше сохраняет направление движения под действием поперечных возмущающих сил.
По аналогии с шинной поворачиваемостью можно сказать, что первый автомобиль имеет недостаточную поворачиваемость, а второй автомобиль – излишнюю креновую поворачиваемость.

У автомобиля с излишней креновой поворачиваемостью при действии поперечной силы кривизна траектории непрерывно увеличивается. Это приводит к росту центробежной силы и дальнейшему уменьшению радиуса поворота. Однако максимальное значение угла поперечного крена обычно ограничивается упорами, предусмотренными конструкцией подвески.
Креновая поворачиваемость связана с шинной поворачиваемостью, так как увод колеса возникает не только под действием моментов, но и при наклоне колеса к вертикали (развале).
Если направление поперечной силы совпадает с направлением развала, то увод возрастает. Один градус развала вызывает увод в 10…20 градусов.
У автомобилей с независимой подвеской на поперечных рычагах крен кузова вызывает изменение развала.
При двухрычажной подвеске колеса наклоняются в сторону крена кузова и направления поперечной силы, что увеличивает общий увод моста.
При однорычажной подвеске колеса наклоняются в сторону, противоположную крену кузова и навстречу поперечной силе, при этом общий увод моста уменьшается.
Читайте также: Как сбросить ошибку по давлению в шинах бмв е70
Так как автомобиль, имеющий недостаточную поворачиваемость, обладает большей устойчивостью, то при его конструировании и эксплуатации стремятся обеспечить именно недостаточную поворачиваемость. Поэтому у легковых автомобилей наиболее распространена подвеска на двух рычагах. Заднюю подвеску выполняют зависимой или же независимой на одном поперечном рычаге.
Если сделать наоборот (впереди установить зависимую, а сзади двухрычажную независимую подвеску), то это приведет к резкому ухудшению управляемости автомобиля.
При эксплуатации для сохранения недостаточной поворачиваемости автомобиля при перевозке грузов их размещают так, чтобы их центр тяжести находился ближе к передней оси автомобиля.
Во всех случаях давление воздуха в шинах колес передней оси поддерживают ниже, чем в задних шинах, а в случае вынужденного использования шин разной конструкции следует более жесткие шины устанавливать на заднюю ось, а менее жесткие – спереди.
Автомобиль с излишней поворачиваемостью может вообще потерять управляемость. Из формулы (3) получим:
При прямолинейном движении автомобиля δ1 = δ2 = θ = 0, ρэ = ∞ и обе части уравнения (3) равны нулю.
Если на автомобиль кратковременно подействует боковая сила (например, порыв ветра), то возникает большой увод колес. В этом случае в уравнении (3) δ1 > 0, δ2 > 0 и δ2 > δ1 (автомобиль имеет излишнюю поворачиваемость), θ = 0, следовательно,
ρэ = L/ ( δ2 – δ1 ) ρэ , и возникнет центробежная сила Рц , которая будет поддерживать колеса в состоянии увода и после прекращения действия исходной возмущающей силы (в данном случае – порыв ветра).

Допустим, что сила Рц параллельна силам боковых реакций Rу1 и Rу2 дороги на колеса автомобиля. Такое допущение основывается на том, что после возникновения центробежная сила Рц и радиус поворота ρэ достаточно велик.
Тогда из уравнения равновесия автомобиля следует (рис. 6)
Центробежная сила Рц и боковые силы Ру1 , Ру2 действуют на колеса со стороны балок мостов, вызывая увод шин:
На основании отношения (1) и с учетом уравнений (5) и (6) получим:
где kув1 и kув2 – коэффициенты сопротивления боковому уводу шин переднего и заднего мостов соответственно.
Из полученных уравнение следует, что при повышении скорости движения углы увода возрастают, причем угол δ2 растет быстрее угла δ1 . Это вызывает уменьшение правой части выражения (5), которая при определенной так называемой критической скорости vув оказывается равной нулю. При этой скорости автомобиль может двигаться криволинейно, хотя его управляемые колеса находятся в нейтральном положении.
Если скорость больше vув , то ( δ2 – δ1 ) > L/ρэ и угол θ становится отрицательным.
Это означает, что для поворота вправо передние колеса следует повернуть влево.
Таким образом, автомобиль с излишней поворачиваемостью теряет управляемость, если его скорость больше критической.
Из выражений (5), (7) и (8) определяется критическая скорость автомобиля по условиям управляемости:
У автомобилей с недостаточной или нейтральной поворачиваемостью критическая скорость vув отсутствует, так как при δ2 δ1 подкоренное выражение отрицательно, а при δ2 = δ1 оно равно бесконечности.
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле
🎬 Видео
Толщина боковины – какая точность измерений?Скачать

Секрет балансировки колёс, о котором не все знают!!!Скачать
Шины (ч.3) и шасси гоночного автомобиля | А.Плахотниченко, Осенняя школа ФС 2020Скачать
Ремонт бокового пореза на крупногабаритной радиальной шине (КГШ) MICHELIN 27.00 R49 Вся правда!Скачать
Всего за 2 минуты определить направление движения у колеса, если нет Никаких ОбозначенийСкачать
Модели шин: MF Tyres и безразмерная Милликена/Радта | А. Плахотниченко (Осенняя школа ФС '21)Скачать
Движение тел в жидкостях и газах. Лобовое сопротивление и подъемная сила. Формула Стокса. 10 класс.Скачать
Проектирование подвески. Часть 1. Системный уровень | А. Плахотниченко (Осенняя школа ФС '21)Скачать
Испытания и моделирование шин в горизонтальной динамике | Павел Саркисов (Осенняя школа ФС '22)Скачать
Как правильно сделать центровку валов | Соосность | ВыравниваниеСкачать
Самая точная балансировка и безопасный шиномонтаж! Устранение биений и вибраций колес.Скачать
Влияние свойств ТС кат. С, D на эффективность и безопасность управленияСкачать
К0 - коэффициент бокового давленияСкачать
Hunter, Стенд виброконтроля Road Force ELITEСкачать
Техника разворота на шоссейном велосипеде. Упражнения на балансСкачать
Определение коэффициента лобового аэродинамического сопротивленияСкачать
Испытания колес с посадочным диаметром от 15 до 18 дюймовСкачать
















