
Изменение температуры кондиционера Ford Fusion при помощи команд через шину CAN.

Автор: Ariel Nuñez
Изменение температуры кондиционера Ford Fusion при помощи команд через шину CAN.

Рисунок 1: Как при помощи приложения управлять ключевыми функциями автомобиля?
Недавно я вместе со своими друзьями из компании Voyage работал над реализацией программного управления системой кондиционирования в Ford Fusion. На данный момент Voyage занимается разработкой бюджетных самоуправляемых автомобилей. Конечная цель: чтобы каждый смог вызвать автомобиль к своей входной двери и безопасно путешествовать туда, куда вздумается. В компании Voyage считают крайне важной возможностью предоставление доступа к ключевым функциям автомобиля с заднего кресла, поскольку не за горами тот день, когда работа водителя будет полностью автоматизирована.
Зачем нужна шина CAN
Современные автомобили используют множество систем управления, которые во многих случаях функционируют подобно микро-службам в веб-разработке. Например, подушки безопасности, тормозные системы, регулирование скорости движения (круиз контроль), электроусилитель руля, аудиосистемы, управление окнами и дверями, подстройка стекл, системы зарядки для электрических автомобилей и т. д. Эти системы должны уметь осуществлять коммуникацию и считывать параметры друг друга. В 1983 в компании Bosch началась разработка шины CAN (Controller Area Network; Локальная сеть контролеров) для решения этой сложной задачи.
Можно сказать, что шина CAN представляет собой простую сеть, где каждая система автомобиля может считывать и отсылать команды. Эта шина интегрируется все сложные компоненты элегантным образом, что дает возможность реализовать всеми любимые функции автомобиля, которыми мы пользуемся.

Рисунок 2: Впервые шина CAN стала использоваться в 1988 году в БМВ 8 серии
Самоуправляемые автомобили и шина CAN
Поскольку интерес к разработке самоуправляемых автомобилей серьезно вырос, соответственно, словосочетание «шина CAN» также становится популярным. Почему? Большинство компаний, создающих самоуправляемых автомобилей, не занимаются производством с нуля, а пытаются научиться программно управлять машинами после выхода с конвейера фабрики.
Понимание внутреннего устройства шины CAN, используемой в автомобиле, позволяет инженеру формировать команды при помощи программного обеспечения. Самые нужные команды, как вы можете догадаться, связаны с управлением рулем, ускорением и торможением.
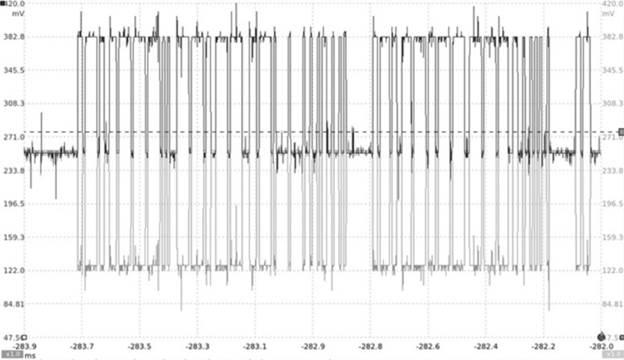
Рисунок 3: Введение в LIDAR (ключевой сенсор самоуправляемого автомобиля)
При помощи сенсоров наподобие LIDAR (light detecting and ranging; оптическая локационная система) машина способна смотреть на мир как суперчеловек. Затем компьютер внутри автомобиля на базе полученной информации принимает решения и посылается команды в шину CAN для управления рулем, ускорение и торможением.
Не каждый автомобиль способен стать самоуправляемым. И по некоторым причинам компания Voyage выбрала модель Ford Fusion (подробнее о причинах можно почитать в этой статье).
Исследование шины CAN в Ford Fusion
Перед началом исследования систем кондиционирования воздуха в Ford Fusion я открыл мою любимую книгу The Car Hacker’s Handbook. Перед погружением в суть вопроса заглянем в Главу 2, где описываются три важные концепции: протоколы шины, шина CAN и CAN-фреймы.
Шина CAN
Шина CAN начала использоваться в американских легковых машинах и небольших грузовиках с 1994 года и с 2008 года в обязательном порядке (в европейских автомобилях с 2001 года). В этой шине предусмотрено два провода: CAN high (CANH) и CAN low (CANL). Шина CAN использует дифференциальный сигналинг, суть которого заключается в том, что при поступлении сигнала на одном проводе вольтаж повышается, а на другом понижается на одну и ту же величину. Дифференциальный сигналинг используется в средах, которые должны быть малочувствительны к шуму, например, в автомобильных системах или при производстве.
Рисунок 4: Необработанный сигнал шины CAN, отображаемый на осциллографе
С другой стороны, пакеты, передаваемые по шине CAN, не стандартизированы. Каждый пакет содержит 4 ключевых элемента:
- АрбитражныйID (ArbitrationID) представляет собой широковещательно сообщение, идентифицирующее устройство, которое пытается начать коммуникацию. Любое устройство может отсылать несколько арбитражных ID. Если в единицу времени по шине отсылаются два CAN-пакета, пропускается тот, у которого ниже арбитражный ID.
- Расширение идентификатора (Identifierextension;IDE) – в случае с шиной CAN стандартной конфигурации этот бит всегда равен 0.
- Код длины данных (Datalengthcode;DLC) определяет размер данных, который варьируется от 0 до 8 байт.
- Данные. Максимальный размер данных, переносимых стандартной шиной CAN, может быть до 8 байт. В некоторых системах происходит принудительное дополнение пакета до размера 8 байт.
Читайте также: Шина стирается по центру
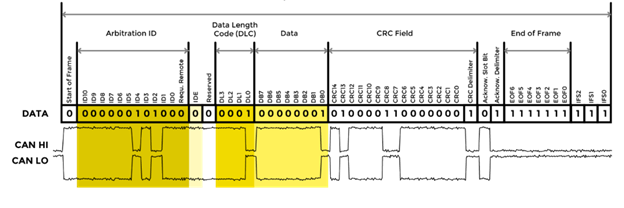
Рисунок 5: Формат стандартных CAN-пакетов
CAN фреймы
Для того чтобы включить / выключить климатическую систему мы должны найти нужную шину CAN (в автомобиле таких шин несколько). В Ford Fusion есть как минимум 4 задокументированные шины. 3 шины работают на высокой скорости 500 кбит/с (High Speed CAN; HS) и 1 шина на средней скорости 125 кбит/с (Medium Speed CAN; MS).
К порту OBD-II подключено две высокоскоростные шины HS1 и HS2, однако там стоит защита, которая не позволяет подделывать команды. Вместе с Аланом из компании Voyage мы вынули порт OBD-II и нашли места соединения со всеми шинами (HS1, HS2, HS3 и MS). На задней стенке OBD-II все шины подключались к модулю шлюза (Gateway Module).
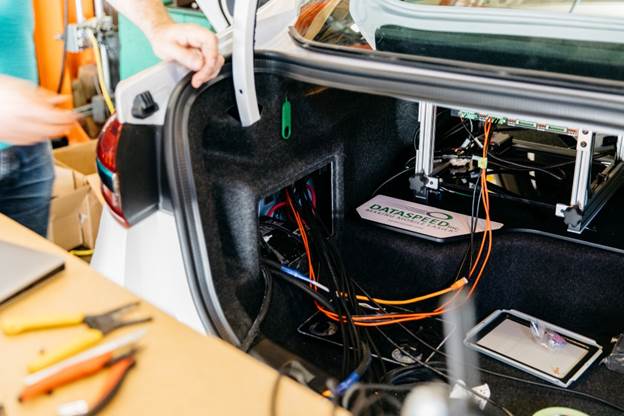
Рисунок 6: Homer – первое самоуправляемое такси от компании Voyage
Поскольку климатическая система управляется через медиа-интерфейс (SYNC), нам придется отсылать команды через среднескоростную шину (MS).
Чтение и запись CAN-пакетов осуществляется при помощи драйвера и сетевого стека SocketCAN, созданного исследовательским отделом компании Volkswagen для ядра в Linux.
Мы будем подсоединять три провода от машины (GND, MSCANH, MSCANL) к переходнику Kvaser Leaf Light HSv2 (можно купить за 300$ на Амазоне) или к CANable (продается за 25$ на Tindie) и загружать на компьютере со свежим Linux-ядром шину CAN в качестве сетевого устройства.
После загрузки запускаем команду candump can0 и начинаем отслеживать трафик:
Несмотря на то, что вышеуказанная информация эквивалентна амплитуде звукового сигнала, довольно трудно понять, что происходит, и обнаружить какие-либо закономерности. Нам нужно нечто похожее на частотный анализатор, и такой эквивалент есть в виде утилиты cansniffer. Cansniffer показывает список идентификаторов и позволяет отслеживать изменения в секции данных внутри CAN-фрейма. По мере того как мы будем изучать определенные идентификаторы, мы можем установить фильтр нужных ID, которые имеют отношение к нашей задаче.
На рисунке ниже показан пример информации, снятой при помощи cansniffer с шины MS. Мы отфильтровали все, что имеет отношение к идентификаторам 355, 356 и 358. После нажатия и отпускания кнопок, связанных с подстройкой температуры, в самом конце появляется значение 001C00000000.
Рисунок 7: Информация с шины MS, снятая при помощи утилиты cansniffer
Далее необходимо объединить функционал для управления климатической системой с компьютером, работающим внутри автомобиля. Компьютер работает на операционной системе ROS (Robot Operating System; Операционная система для роботов). Поскольку мы используем SocketCAN, то модуль socketcan_bridge серьезно упрощает задачу по преобразованию CAN-фрейма в блок информации, понимаемый операционной системой ROS.
Ниже показан пример алгоритма декодирования:
Полученные данные хранятся в CelsiusReport.msg:
После нажатия всех нужных кнопок в машине, у нас появляется следующий список:
Затем эти строки отсылаются на узел под управлением операционной системы ROS и далее происходит трансляция в коды, понимаемые автомобилем:
Заключение
Теперь мы можем создавать и посылать те же самые коды в шину CAN, которые формируются при нажатии физических кнопок, связанных с повышением и понижением температуры, что дает возможность удаленного изменения температуры автомобиля при помощи приложения, когда мы находимся на заднем сидении автомобиля.
Рисунок 8: Удаленное управление климатической системой автомобиля
Это лишь небольшой шаг при создании самоуправляемого такси вместе со специалистами компании Voyage. Я получил массу положительных эмоций во время работы над этим проектом. Если вы тоже интересуетесь этой темой, можете ознакомиться со списком вакансий в компании Voyage.
- Использование стандарта CAN в Arduino – полное руководство
- Краткие сведения о протоколе CAN
- Формат CAN сообщений
- Проводники, используемые в CAN
- Сравнение CAN с SPI и I2C
- Применения CAN протокола
- Использование протокола CAN в Arduino
- CAN модуль (контроллер шины CAN) MCP2515
- Необходимые компоненты
- Схема проекта
- Объяснение программы для Arduino
- Инициализация CAN модуля MCP2515
Использование стандарта CAN в Arduino – полное руководство
Современные автомобили включают в себя несколько десятков разнообразных датчиков. И все эти датчики регулярно обмениваются информацией с другими датчиками/устройствами автомобиля. Причем автомобили с каждым годом становятся все «умнее» и поэтому количество датчиков в них все больше увеличивается. В автомобилях сегодняшнего дня находят широкое применение системы автономного вождения, системы безопасности с автоматически срабатывающими подушками безопасности, системы контроля давления в шинах, круиз-контроль и т.д. В большинстве случаев информация, поступающая от этих датчиков, является критически важной. Например, если сработает датчик столкновения, которому срочно нужно передать сигнал на раскрытие подушек безопасности, а ему это помешают сделать какие-либо сигналы/процессы в электронной системе автомобиля. В этом случае жизнь людей в автомобиле может оказаться под угрозой. Поэтому в автомобилях не используют такие широко распространенные в обычной электронике протоколы передачи данных как UART, SPI или I2C. Вместо них конструкторы автомобилей отдают предпочтение значительно более надежным протоколам передачи данных, таким как LIN, CAN, FlexRay и т.д.
Читайте также: Гост в производстве шин

Наибольшее распространение среди этих «надежных» протоколов получил стандарт (протокол) CAN. Этот стандарт широко применяется не только в электронных системах современных автомобилей, но и во многих других промышленных устройства, в которых критически важна надежная передача данных. Достаточно подробную информацию о стандарте CAN можно прочитать в соответствующей статье Википедии. Мы же в данной статье рассмотрим обмен данными между двумя платами Arduino с помощью протокола CAN.
Краткие сведения о протоколе CAN
CAN (Controller Area Network – сеть контролеров) представляет собой протокол (стандарт) последовательной связи, разработанный для промышленных и автомобильных приложений. Это ориентированный на обмен сообщениями протокол, используемый для связи между множеством (несколькими) устройств. Когда различные CAN устройства соединены между собой как показано на следующем рисунке, они формируют сеть, которая работает наподобие центральной нервной системы человека и позволяет любому устройству общаться с любым другим устройством в этой сети.

CAN-сеть состоит из двух проводников (CAN High и CAN Low) и обеспечивает двунаправленную передачу данных. На практике под CAN-сетью обычно подразумевается сеть топологии «шина» с физическим уровнем в виде дифференциальной пары. Передача ведется кадрами, которые могут принимать все узлы сети. Для доступа к такой шине выпускаются специализированные микросхемы (модули) – драйверы CAN-шины.
Обычно скорость передачи по CAN-шине варьируется от 50 Кбит/с до 1 Мбит/с, а дальность связи лежит в диапазоне от 40 метров (на скорости 1 Мбит/с) до 1000 метров (на скорости 50 Кбит/с).
Формат CAN сообщений
В CAN-сети данные передаются в виде сообщений определенного формата. Этот формат состоит из большого числа сегментов, но двумя основными сегментами является идентификатор (identifier) и данные (data), которые и позволяют передавать и принимать сообщения по CAN-шине.
Идентификатор (Identifier) – также известен под именами CAN ID и PGN (Parameter Group Number). Он используется для идентификации CAN устройств в CAN-сети. Длина идентификатора составляет 11 или 29 бит в зависимости от того какой тип протокола CAN используется:
- Standard (стандартный) CAN: 0-2047 (11-bit);
- Extended (расширенный) CAN: 0-2 29 -1 (29-bit).
Data – это данные, которые необходимо передать от одного устройства другому. Длина данных может составлять от 0 до 8 байт.
Data Length Code (DLC) (длина поля данных): может принимать значения от 0 до 8 в зависимости от количества байт для передачи.
Проводники, используемые в CAN
CAN протокол работает по двум проводникам, именуемыми CAN_H и CAN_L, для передачи и приема информации. Оба проводника работают как дифференциальная линия, что означает что CAN сигнал (0 или 1) представляет собой разность потенциалов между CAN_L и CAN_H. Если эта разность положительна и больше определенного минимального уровня напряжения, то это 1, а если эта разность отрицательна – то это 0.
Обычно в протоколе CAN используется кабель с витыми жилами. Как показано на выше приведенном рисунке, на обоих концах CAN-сети включается 120-омный резистор для обеспечения баланса в линии.
Сравнение CAN с SPI и I2C
На нашем сайте мы ранее уже рассматривали использование в платах Arduino протоколов SPI и I2C, поэтому давайте сравним данные протоколы с протоколом CAN.
| Параметр | SPI | I2C | CAN |
| Скорость | 3-10 Мбит/с | стандарт: 100 Кбит/с; |
По скорости стандарт CAN не в лидерах, но его главным «козырем» является высокая надежность связи.
Применения CAN протокола
- В связи с чрезвычайно высокой надежностью и устойчивостью CAN протокола он широко применяется в автомобилях, промышленных механизмах, сельском хозяйстве, медицинском оборудовании и т.д.
- В связи с небольшим количеством используемых проводников CAN протокол исключительно удобен для применения в автомобилях.
- Устройства на основе CAN протокола отличаются низкой стоимостью.
- В CAN-сеть (шину) легко добавлять и удалять новые устройства.
Использование протокола CAN в Arduino
Поскольку платы Arduino не имеют в своем составе встроенного CAN порта, то для реализации связи между ними по данному протоколу мы будем использовать внешние CAN модули MCP2515. Эти модули подключаются к плате Arduino по интерфейсу SPI.
CAN модуль (контроллер шины CAN) MCP2515
Модуль MCP2515 включает в себя CAN контроллер MCP2515, который представляет собой высокоскоростной CAN приемопередатчик. Соединение модуля MCP2515 с микроконтроллером осуществляется с помощью интерфейса SPI, поэтому его легко подключить ко всем микроконтроллерам с данным интерфейсом.

Начинающим изучение CAN-шины целесообразно начинать именно с этого модуля ввиду его простоты и легкости подключения к большинству современных микроконтроллеров.
Основные технические характеристики модуля MCP2515:
- включает в себя высокоскоростной CAN приемопередатчик TJA1050;
- размеры модуля: 40×28mm;
- управление по интерфейсу SPI с возможностью подключения к CAN-шине нескольких устройств;
- кварцевый генератор на 8 МГц;
- сопротивление на концах 120 Ом;
- включает независимый ключ, светодиодный индикатор, индикатор мощности;
- поддерживает скорости передачи данных до 1 Мбит/с;
- низкий потребляемый ток в режиме ожидания;
- возможность подключения до 112 устройств (узлов).
Назначение контактов (распиновка) CAN модуля MCP2515 представлено в следующей таблице.
| Наименование контакта | Назначение контакта |
| VCC | контакт питания 5 В |
| GND | общий провод (земля) |
| CS | SPI SLAVE select pin (Active low) (выбор ведомого) |
| SO | SPI master input slave output lead |
| SI | SPI master output slave input lead |
| SCLK | контакт синхронизации SPI |
| INT | контакт прерывания MCP2515 |

В данном проекте мы будем передавать данные, считываемые с датчика температуры и влажности DHT11 платой Arduino Nano, плате Arduino Uno с помощью CAN модуля MCP2515.
Необходимые компоненты
- Плата Arduino Uno (купить на AliExpress).
- Плата Arduino Nano (купить на AliExpress).
- Датчик температуры и влажности DHT11 (купить на AliExpress).
- ЖК дисплей 16х2 (купить на AliExpress).
- MCP2515 CAN Module (контроллер шины CAN MCP2515) – 2 шт. (купить на AliExpress).
- Потенциометр 10 кОм (купить на AliExpress).
- Макетная плата.
- Соединительные провода.
Схема проекта
Схема проекта для связи между двумя платами Arduino с помощью протокола CAN и модулей MCP2515 представлена на следующем рисунке.
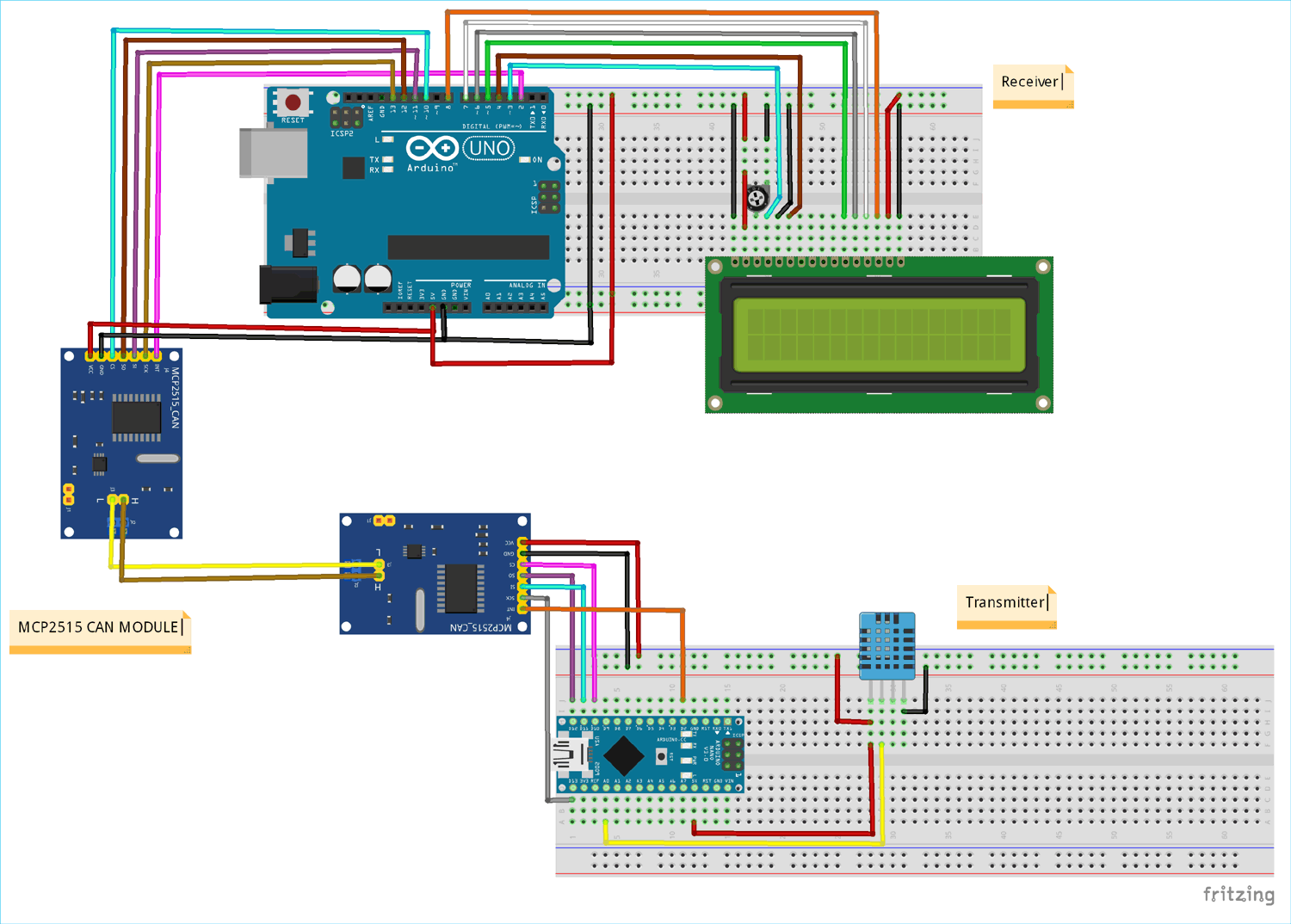
Соединения на передающей стороне:
| Компонент — контакт | Arduino Nano |
| MPC2515 — VCC | +5V |
| MPC2515 — GND | GND |
| MPC2515 — CS | D10 (SPI_SS) |
| MPC2515 — SO | D12 (SPI_MISO) |
| MPC2515 — S I | D11 (SPI_MOSI) |
| MPC2515 — SCK | D13 (SPI_SCK) |
| MPC2515 — INT | D2 |
| DHT11 — VCC | +5V |
| DHT11 — GND | GND |
| DHT11 — OUT | A0 |
Соединения на приемной стороне:
| Компонент — контакт | Arduino Uno |
| MPC2515 — VCC | +5V |
| MPC2515 — GND | GND |
| MPC2515 — CS | 10 (SPI_SS) |
| MPC2515 — SO | 12 (SPI_MISO) |
| MPC2515 — SI | 11 (SPI_MOSI) |
| MPC2515 — SCK | 13 (SPI_SCK) |
| MPC2515 — INT | 2 |
| LCD (ЖК дисплей) — VSS | GND |
| LCD — VDD | +5V |
| LCD — V0 | к среднему контакту потенциометра 10 кОм |
| LCD — RS | 3 |
| LCD — RW | GND |
| LCD — E | 4 |
| LCD — D4 | 5 |
| LCD — D5 | 6 |
| LCD — D6 | 7 |
| LCD — D7 | 8 |
| LCD — A | +5V |
| LCD — K | GND |
Соединения между двумя CAN модулями MCP2515:
| MCP2515 (Arduino Nano) | MCP2515 (Arduino UNO) |
| H | H |
| L | L |
После сборки всей схемы на макетных платах у нас получилась следующая конструкция.

Объяснение программы для Arduino
Первым делом нам необходимо установить библиотеку для работы с протоколом CAN в Arduino IDE. Сначала скачайте ZIP файл библиотеки по следующей ссылке — Arduino CAN MCP2515 Library. Затем установите ее в Arduino IDE с помощью пункта меню Sketch -> Include Library -> Add .ZIP Library.
В нашем проекте мы код программы разделим на две части: для передающей части и для приемной части. Полные коды программ приведены к конце статьи, здесь же мы кратко рассмотрим их основные фрагменты.
Инициализация CAN модуля MCP2515
Для установления соединения платы Arduino с модулем MCP2515 выполните следующую последовательность шагов. Но перед этим убедитесь в том, что указанная выше библиотека CAN MCP2515 установлена в вашу Arduino IDE.
Шаг 1. Установите номер контакта, к которому подключена линия CS интерфейса SPI (10 по умолчанию).
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле