В середине 90-х годов для обеспечения безопасности и комфорта на автомобиле «представительского» класса могло быть от 10 до 15 блоков управления.
В настоящее время такого количества блоков управления уже недостаточно, оно увеличилось, возможно, в два раза (или больше).
Такое стремительное увеличение количества блоков управления заставило производителей искать новые пути решения задач для поддержания бесперебойной и стабильной связи между блоками управления.
И в настоящий момент уже существуют следующие технологии передачи данных:
– шина LIN (однопроводная шина)
– шина MOST (оптоволоконная шина)
– беспроводная шина Bluetoot h
В данной статье мы рассмотрим шину LIN .
Шина под названием » LIN » — это сокращение от полного названия: » Local Interconnect Network «, то есть, «локальная коммутируемая сеть».
Это означает. что все коммутируемые блоки управлению подключены и располагаются в пределах одного ограниченного пространства, например, крыши автомобиля, двери автомобиля и так далее.
Обмен данными между коммутируемыми блоками системы LIN происходят по шине данных CAN .
У шины LIN есть особенность: она однопроводная.
Цвет изоляции провода — фиолетовый (на нем может быть цветная маркировка).
Толщина провода (площадь поперечного сечения) составляет около 0.35 мм2.
Провода шины LIN экранировать не обязательно.
Однако, как уже говорилось, скорости передачи данных по шине CAN и шине LIN различные.
Различными также являются и сигналы.
Для этого был придуман так называемый «Блок управления LIN-Master «, который является своеобразным «переводчиком» между шиной LIN и шиной CAN :
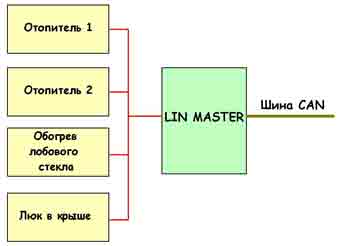
У этого блока существует довольно много задач:
— контроль передачи данных
— контроль скорости передачи данных
— постоянная диагностика работоспособоности всех блоков, подключенных к шине LIN
Итак, что такое LIN Master мы разобрались.
Но есть еще такое понятие, как LIN Slave .
Это не что иное, как исполнительные механизмы, электронные или электронномеханические узлы или блоки, получающие команды от блока LIN Master .
Но не только команды.
Может (и постоянно идет) опрос всех подключенных компонентов по текущему и фактическому состоянию, для своевременного обнаружения неисправности и возможности выполнять заданные функции.
Как видно из фото 1, для нескольких исполнительных механизмов требуется только один контакт () в блоке pin LIN Master .
Скорость передачи данных в шине LIN невысокая и составляет приблизительно от 5 до 25 кбит\сек.
Рецессивный уровень
Если на шину данных LIN не будет послана телеграмма или рецессивный бит, то на шину данных подается напряжение, практически равное напряжению аккумуляторной батареи.
Для передачи доминирующего бита по шине данных LIN в передающем блоке управления шина данных замыкается на массу через приемопередатчик (трансивер) — см. фото 2 :
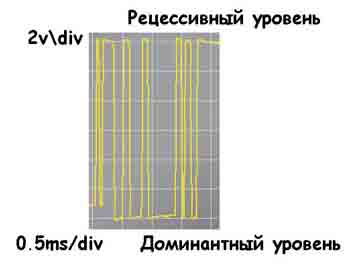
Надежность и стабильность передачи данных обеспечивается установлением определенных допусков в сигналах на рецессивном и доминантном уровнях.
Между блоками Slave и Master постоянно «курсируют» телеграммы определенной формы.
Блок управления LIN Master периодически посылает телеграммы, которые строго разделены на четыре составляющие:
Читайте также: Фундамент для дома своими руками из шин
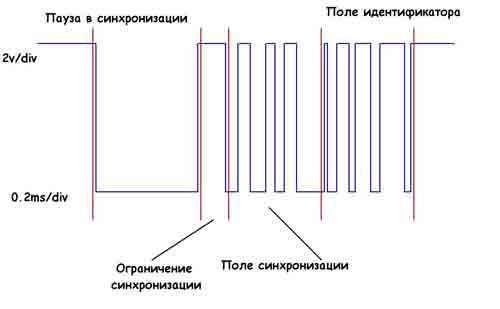
1 — пауза в синхронизации
2 — ограничение синхронизации
3 — поле синхронизации
4 — поле идентификатора
В посланной телеграмме, так называемая «пауза в синхронизации» нужна для того, что бы «сообщить» блокам о том, что посылается телеграмма. Минимальная пауза в синхронизации равняется времени передачи 13 битов. Пауза посылается с доминантным уровнем.
Поле синхронизации требуется для того, что бы все исполнительные блоки могли настроиться или проверить свои настройки перед приемом телеграммы — оно состоит из строго определенной последовательности битов 0101010101.
Видео:Как работает LIN шина автомобиля. K-Line L-Line шины данных. Лин шина автомобиля. Lin-bus networkСкачать

Протокол LIN. Полный обзор, описание, формат кадра.
Совсем недавно мы разбирали протокол CAN, и вот сегодня продолжаем двигаться по автомобильным стандартам! На очереди LIN, который также свое основное применение нашел в автомобильной промышленности, да и, в общем-то, для этого и был изначально создан.
Чуть забегу вперед — этому протоколу будет посвящено целых три статьи. Сегодня будет исключительно теория, максимально подробно и наглядно. Во второй части мы будем работать с LIN на практике при помощи STM32 с использованием аппаратных средств микроконтроллера. А вот в третьей части мы с нуля напишем свой собственный драйвер для LIN на базе UART.
Итак, протокол LIN был создан в конце 90-х годов (первая версия спецификации относится к 1999 году) группой известных компаний, в основном, автопроизводителей. Среди них:
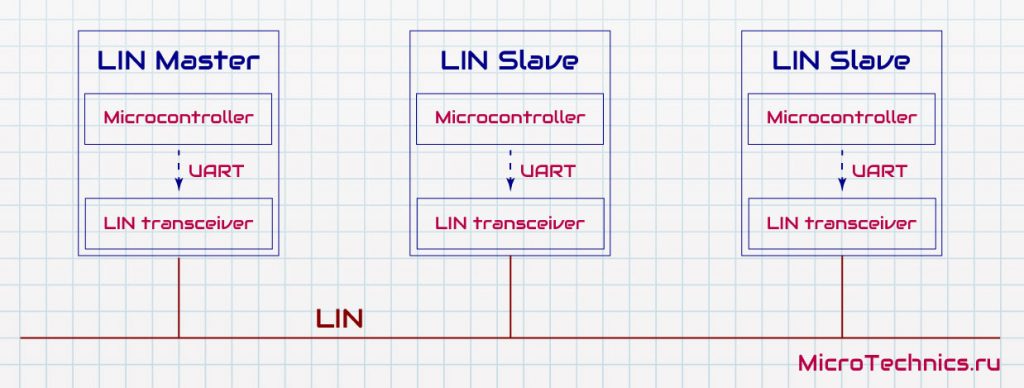
В целом архитектура шины выглядит следующим образом:
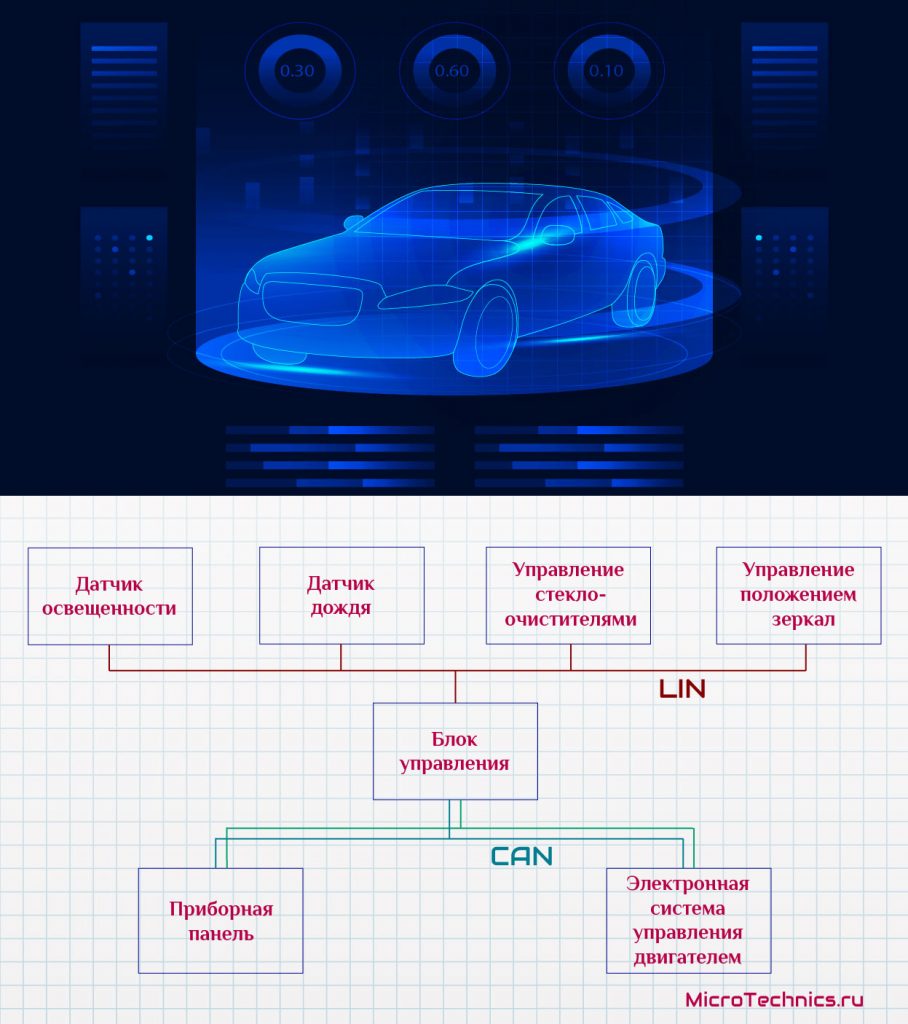
В чем же смысл, спросите вы, ведь есть же CAN? Так вот, использование LIN не исключает использование CAN, а скорее дополняет. LIN является однопроводной шиной, более дешевой, чем CAN, и используется для связи менее критичных для безопасности и для работы автомобиля узлов между собой. То есть основная связь по-прежнему обеспечивается протоколом CAN, а менее важные блоки и датчики уже подключаются по LIN:
Низкая стоимость обеспечивается в том числе тем, что для реализации протокола обычно используется обычный UART микроконтроллера. Все остальное, необходимое для работы шины, реализуется исключительно в ПО. Но это с программной точки зрения. Физически же все-таки требуется использование дополнительной микросхемы трансивера. И самый популярный кандидат бесспорно — TJA1021:

Скорость передачи данных также вполне стандартная для UART’а: от 1 — до 20 кБод, длина линии может достигать 40 м. Давайте теперь перейдем к самому интересному, к структуре пакета в LIN!
Видео:Блок управления, генератор, CAN или LIN шина либо АКБ? P0401, P0523, U1113, U1132, U0106 (Видео 90)Скачать

Структура пакета протокола LIN.
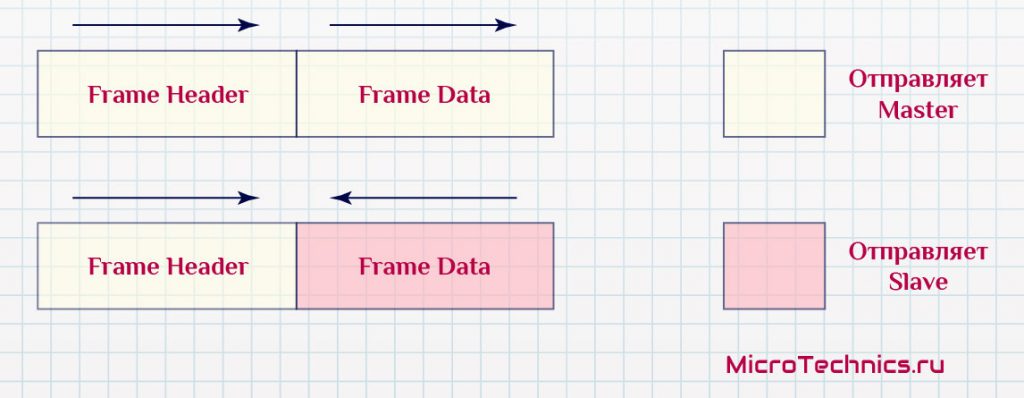
Каждый пакет состоит из заголовка (header) и непосредственно данных (data):

Причем важной особенностью является то, что на шине присутствуют два типа устройств — LIN Master (ведущий) и LIN Slave (подчиненный). При этом инициировать передачу данных может только Master. То есть Slave-устройство не может само по себе выслать в сеть данные, оно должно ожидать запроса от ведущего и никак иначе ?
Таким образом, именно Master отправляет в шину заголовки пакетов. В зависимости от определенного бита заголовка (это мы разберем чуть позже) подчиненные устройства понимают, что им требуется сделать:
- выслать данные, которые запрашивает ведущий
- или продолжать прием данных, в случае если, например, Master выполняет конфигурацию подчиненного
Читайте также: Датчики давления в шинах autel 315
Как видите, иерархия очень строгая!
С организацией обмена данными разобрались, теперь можно углубиться непосредственно в структуру уже упомянутых частей LIN-фреймов. Заголовок пакета состоит из нескольких байт:
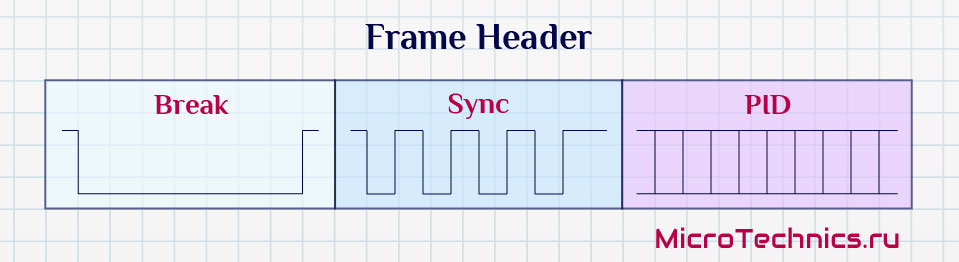
- Поле Break — это поле представляет из себя 13 нулевых битов подряд.
- Поле Sync — поле синхронизации. Этот байт имеет определенное значение — 0x55. Именно это число выбрано по той причине, что в двоичном виде оно представляет из себя чередующиеся нули и единицы — 0b01010101. При помощи этого поля устройства могут настроить свою скорость передачи данных.
- Поле PID — поле идентификатора. В нем зашифровано следующее:
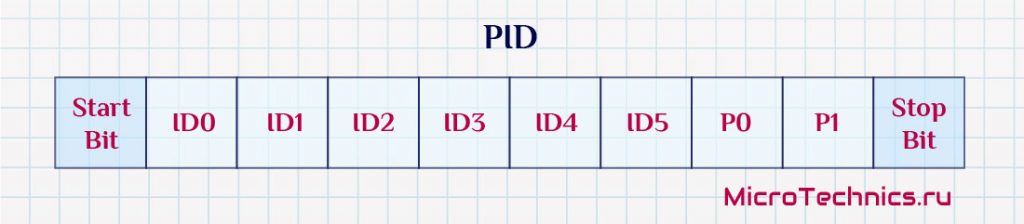
Старт и стоп-биты здесь играют ту же роль, что и при передаче данных по UART, и используются для каждого из передаваемых по LIN байт.
Из битов ID0…ID5 складывается непосредственно значение идентификатора. А поскольку под это выделено только 6 битов, то значит диапазон значений идентификатора составляет от 0 до 0x3F (0b111111). При этом значения от 0x3C до 0x3F являются служебными. Кроме того, в значении идентификатора содержится информация о количестве передаваемых в Frame Data байт:
| Идентификатор | Кол-во байт |
|---|---|
| 0x00-0x1F | 2 |
| 0x20-0x2F | 4 |
| 0x30-0x3F | 8 |
Итак, тут у нас остаются еще два бита четности, для них формула выглядит следующим образом:
И на этом все! Заголовок пакета сформирован.
Поле данных в свою очередь состоит из непосредственно байт данных (от 1-го до 8-ми байт) и контрольной суммы (1 байт):
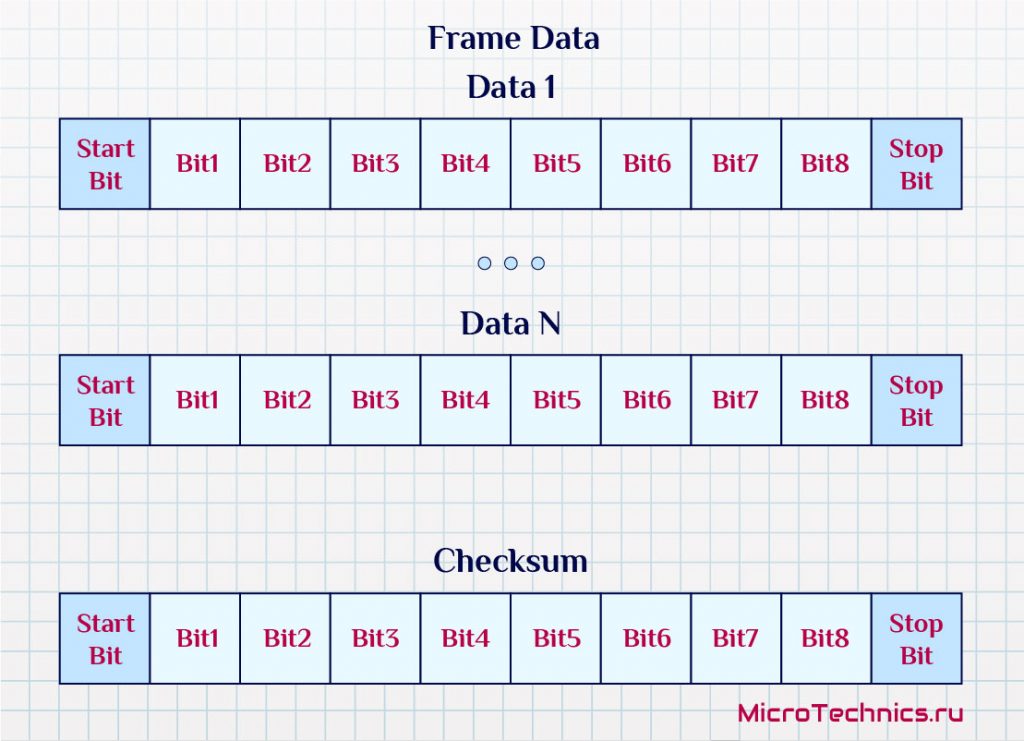
Для расчета контрольной суммы есть два варианта:
- Классическая контрольная сумма (версия LIN1.x) — сумма всех байт данных из поля Frame Data с переносом. После суммирования полученный байт инвертируется.
- Расширенная контрольная сумма (версия LIN2.x) — используется такой же алгоритм, только в суммировании участвует еще и байт PID. Сообщения с заголовками 0x3C и 0x3D должны использовать классическую контрольную сумму.
Давайте рассмотрим пример расчета классической контрольной суммы. Пусть байты данных равны: 0x30, 0x31, 0x32, 0x33, 0x34, 0x35, 0x36, 0x37. Суммируем:
Вычитаем из полученного значения 0xFF:
И инвертируем, в итоге получаем:
Для выбранных нами байт данных контрольная сумма равна 0x62.
В практической статье по протоколу LIN мы обязательно посмотрим, как все это будет выглядеть на деле, а пока на этом заканчиваем, до скорой встречи!
Видео:CAN шина👏 Как это работаетСкачать

Параметрический поиск по компонентам
- 21.02.2018 10:40Приемопередатчики интерфейса CAN с единым напряжением питания 3.3 В и защитой от перегрузок на шине до ±36 В
Устройства также отличаются высокой пропускной способностью, функцией регулировки скорости нарастания выходного сигнала и малопотребляющим режимом ожидания
Производитель: Exar Группа компонентов: CAN
- 21.02.2018 10:22Миниатюрный модуль зарядного устройства малой мощности для работы в системах накопления энергии из окружающей среды
Устройство, выполненное в виде готового решения с минимальным числом внешних компонентов, отличается низкой стоимостью, высокой эффективностью и чрезвычайно компактными размерами
Производитель: Silvertel Группа компонентов: PoE-модули питания
Читайте также: Что значит частота шины материнской платы
- 21.02.2018 10:08Низковольтный модуль драйвера светодиодов Ag201 с программируемой величиной выходного тока
Благодаря возможности пользовательской установки максимального тока нагрузки, драйвер способен управлять различными типами светодиодов
Производитель: Silvertel Группа компонентов: Контроллеры Дисплеев
- 21.02.2018 09:53Коммутаторы Ethernet BCM56980 серий StrataXGS® Tomahawk® 3 с пропускной способностью 12.8 Tбит/с
Семейство StrataXGS Tomahawk 3 с поддержкой до 32 портов стандарта 400GbE может использоваться для построения высокомасштабируемых распределительных, объединительных и масштабирующих коммутаторов
Производитель: Broadcom Limited Группа компонентов: Ethernet
- 21.02.2018 09:44Компактный DC/DC преобразователь в исполнении µModule® с током нагрузки 20 А в 1-канальной и 10 А на канал в 2-канальной конфигурации,
ИС предназначена для каскадов питания ПЛИС, графических процессоров, специализированных микросхем и системного энергообеспечения
Производитель: Analog Devices Группа компонентов: Понижающие преобразователи напряжения
- 28.11.2017 06:05Скидки от 50% на ПО для проектирования печатных плат от Mentor Graphics
ЗАО «Нанософт», официальный дистрибьютор компании Mentor Graphics, объявляет о старте специального предложения на приобретение программных решений для разработки электроники – PADS
Производитель: Группа компонентов:
- 24.09.2016 08:15Компания АВИТОН — официальный представитель Regatron (Швейцария)
Компания Regatron осуществляет разработку и производство источников питания
Производитель: Группа компонентов: Источники питания
- 15.09.2016 08:42Arrow Electronics проводит в жизнь технологии краудфандинга с Indiegogo
Их деятельность направлена на оптимизацию цепочки краудфандинг — продукт и должна ускорить темпы внедрения инноваций для технологии интернета вещей (IoT)
Производитель: Arrow Electronics Russia Группа компонентов:
- 08.08.2016 08:41«Новости Электроники + Светотехника» №01/2016: LED-освещение для промышленных объектов Производитель: Группа компонентов:
- 22.07.2016 08:31Прошивка Serial Extender упрощает работу с модулями MBee
Два радиомодуля MBee-868 с прошивкой Serial Extender позволяют заменить проводное последовательное соединение между двумя любыми устройствами с интерфейсом UART
Производитель: Группа компонентов: Модули
- 29.07.2015 10:24Компания Altera присоединилась с проекту OPNFV с целью привнести преимущества ПЛИС FPGA в технологию виртуализации сетевых функций
Решения на базе ПЛИС FPGA и Систем-на-Кристалле уже ускоряют работу серверов дата-центров в области предоставления поисковых сервисов и свёрточных нейронных сетей
Производитель: Altera Группа компонентов: FPGA
- 29.07.2015 10:14Пример разработки хранилища данных на базе ПЛИС FPGA удваивает срок службы NAND FLASH памяти
Архитектура ПЛИС FPGA со встроенным процессорным ядром предлагает инновационный метод создания устройств хранения данных для облачных приложений и высокопроизводительных вычислительных систем
Производитель: Altera Группа компонентов: SoC FPGA
- 08.07.2015 13:41Компания Pentair предлагает новые трехмерные чертежи и услуги для конструкторов на портале Traceparts
Чертежи Schroff на портале Traceparts
Производитель: Schroff Группа компонентов:
- 13.04.2015 14:37Cypress Semiconductor: CySmart™ — приложения для устройств Bluetooth® с низким энергопотрбелением (BLE) Производитель: Cypress Группа компонентов: Bluetooth
- 28.01.2015 09:43Audi выбрала Системы-на-Кристалле компании Altera для применения в автомобилях с функцией «Автопилот»
Altera и TTTech Deliver Industry, лидер в области разработки продвинутых систем помощи водителю (ADAS), приступили к разработке систем управления автопилотируемых автомобилей для компании Audi
Производитель: Altera Группа компонентов: Программируемая Логика
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле
- Правообладателям
- Политика конфиденциальности
📺 Видео
Экспресс диагностика CAN шины на автомобиле. №21Скачать

Компьютерная диагностика авто. K-линия и CAN шинаСкачать
поиск нерабочей can шины, часть дваСкачать
Кан шина, что это? Поймет школьник! принцип работыСкачать
LIN шина - пример работы. LIN bus exampleСкачать
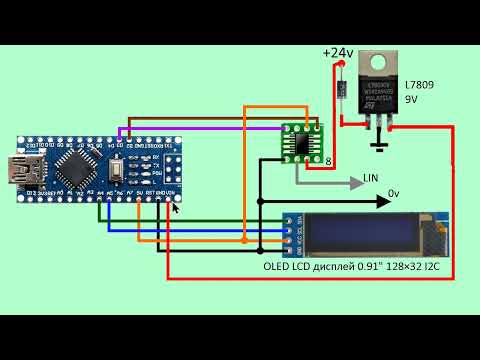
Логический LIN пробник, цифровой тестер лин, к лайн шины автомобиля. На Ардуино, OLED I2C, TJA 1020Скачать
Оживление по шине LIN блока кнопок стеклоподъемников от Mercedes Benz W220Скачать
Подробно про CAN шинуСкачать
Урок №18. Цифровые интерфейсы современного автомобиля: шины данных CAN и LINСкачать
Простая проверка CAN шины. Сканер не видит автомобиль через OBD2. Как правильно выбрать изоленту.Скачать
Поиск неисправности в шине CAN мультиметром. Suzuki Grand Vitara. U1073, P1674, B1553.Скачать
Диагностика генератора "cтарт-стоп" по шине LINСкачать
АЗЫ ДИАГНОСТИКИ. Шины передачи данных. Часть 3. Шина LinСкачать
Как проверить CAN шину Используем симулятор ElectudeСкачать
лекция 403 CAN шина- введениеСкачать
Lin-scan (Анализатор ЛИН шины)Скачать
Для чего служит CAN-шина в сигнализацииСкачать