
- Arduino и MCP2515 – интерфейс CAN для Arduino
- Arduino и MCP2515: принцип работы, подключение, схема, код
- Модуль MCP2515
- Схема подключения Arduino и MCP2515
- Код программы для взаимодействия Arduino и MCP2515
- Подключение модуля MCP2515 к Arduino
- Подключение MCP2515 к Arduino
- Использование стандарта CAN в Arduino – полное руководство
- Краткие сведения о протоколе CAN
- Формат CAN сообщений
- Проводники, используемые в CAN
- Сравнение CAN с SPI и I2C
- Применения CAN протокола
- Использование протокола CAN в Arduino
- CAN модуль (контроллер шины CAN) MCP2515
- Необходимые компоненты
- Схема проекта
- Объяснение программы для Arduino
- Инициализация CAN модуля MCP2515
Arduino и MCP2515 – интерфейс CAN для Arduino
Arduino и MCP2515: принцип работы, подключение, схема, код
CAN (Controlled Area Network) – это стандарт шины, который позволяет микроконтроллеру и его периферийным устройствам обмениваться данными без необходимости использования хост-устройства или компьютера. Протокол CAN, разработанный Robert Bosch GmbH, в основном используется в автомобилях для связи между блоком управления и его компонентами.

Например, блок управления двигателем является основным средством управления, используемым в автомобиле. Этот блок подключен ко многим датчикам и исполнительным механизмам, таким как механизмы контроля потока воздуха, давления, температуры, управления клапанами, двигатели для контроля воздуха и т. д. Связь между этими модулями и блоком управления осуществляется через шину CAN. В этом проекте мы узнаем о модуле контроллера CAN MCP2515, о том, как связать контроллер шины CAN MCP2515 с Arduino, и, наконец, о том, как обеспечить связь между двумя платами Arduino с помощью двух контроллеров CAN MCP2515 и самого протокола CAN.
Модуль MCP2515
Контроллер шины CAN MCP2515 – это простой модуль, который поддерживает протокол CAN версии 2.0B и может использоваться для связи со скоростью 1 Мбит/с. Для того, чтобы настроить полную систему связи, вам потребуется два модуля шины CAN. Модуль, используемый в проекте, показан на рисунке ниже.

Этот конкретный модуль основан на ИС контроллера CAN MCP2515 и ИС приемопередатчика TJA1050. Микросхема MCP2515 представляет собой автономный контроллер CAN и имеет встроенный интерфейс SPI для связи с микроконтроллерами. Что касается микросхемы TJA1050, она действует как интерфейс между ИС контроллера MCP2515 и физической шиной CAN.
MCP2515 – это основной контроллер, который состоит из трех основных подкомпонентов: модуля CAN, логики управления и блока SPI. Модуль CAN отвечает за передачу и прием сообщений на шине CAN. Логика управления управляет настройкой и работой MCP2515, взаимодействуя со всеми блоками. Блок SPI отвечает за интерфейс связи SPI.
На следующем рисунке показана схема CAN-модуля MCP2515, а также показано, как микросхема MCP2515 и TJA1050 подключены к модулю.

Схема подключения Arduino и MCP2515
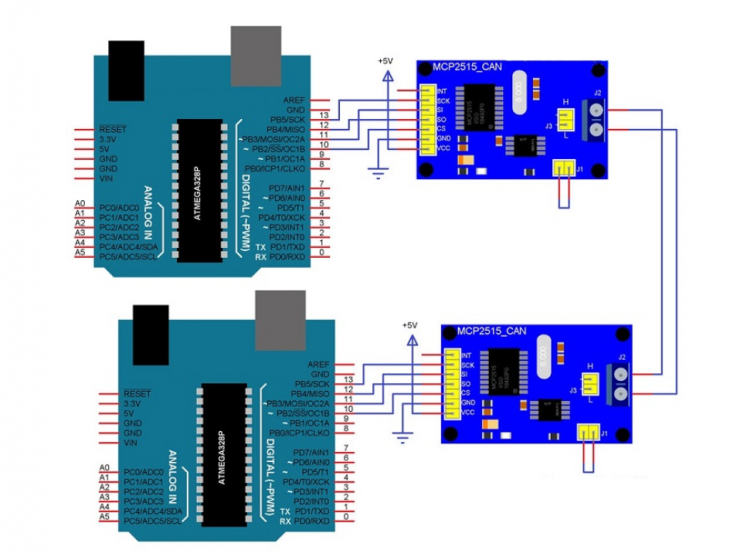
На следующем рисунке показана принципиальная схема подключения модуля CAN MCP2515 с Arduino и связь между двумя Arduino по протоколу CAN.

Код программы для взаимодействия Arduino и MCP2515
Прежде чем углубляться в код, вам необходимо скачать библиотеку для модуля MCP2515. Есть много библиотек, но здесь мы использовали эту: https://github.com/Seeed-Studio/CAN_BUS_Shield. Загрузите ее и поместите извлеченное содержимое в каталог библиотек Arduino. Поскольку сеть CAN включает в себя модуль передатчика и модуль приемника, код также делится на код передатчика и код приемника.
Работа этого проекта очень проста, так как вся работа выполняется библиотеками (SPI и CAN). Поскольку CAN является связью на основе сообщений, вам необходимо отправить сообщение в диапазоне от 0 до 8 байтов.

В этом проекте передатчик отправляет сообщение 1 1 2 3 0 5 6 7. Это сообщение передается по шине CAN, и получатель получает это сообщение, что отображается на его последовательном мониторе. Кроме того, 0-й и 4-й биты, то есть 1 и 0 в вышеуказанной последовательности, извлекаются приемником отдельно и включают и выключают светодиод, подключенный к контакту 2 платы Arduino.
Подключение модуля MCP2515 к Arduino
Модуль MCP2515 — это контроллер шины CAN, который позволяет обмениваться данными между периферийными устройствами и микроконтроллером без подключений к компьютеру. Прежде чем обратиться к сборке аппаратных компонентов, мы рассмотрим основные моменты, связанные с этой технологией.
Controlled Area Network — стандарт интерфейса. Он часто используется в электронных системах диагностики современных автомобилей для передачи информации от блока управления к другим цифровым датчикам и механизмам (контроля температуры, давления и т.п.). Такая его особенность позволяет активно применять устройство во многих как простых, так и более сложных проектах (например, моделирование системы «умный дом») – все это без задействования ПК.
Читайте также: Bmw r1150r размер шин
Модуль MCP2515 представляет собой компактный автономный контроллер с 3 подкомпонентами и интегрированным интерфейсом SPI.
- напряжение питания: 5V;
- интерфейс: высокоскоростной SPI;
- частота: 40 МГц;
- тип шины: CAN;
- max скорость шины: 1МБ/сек.;
- рабочий ток: 5 мА (в режиме ожидания — 1uA);
- диапазон рабочих температур: -40 … +85 C;
- габариты: 4х2.8 см.
Контроллер оснащен держателем Micro SD-карты, кнопкой сброса, разъемом для последовательного LCD, 2-мя LED-индикаторами. При желании возможно управление с помощью джойстика.
Кроме всего вышеперечисленного, устройство имеет неплохие дополнительные (опциональные) возможности: эффективная фильтрация сведений, высокая производительность и коммерческая доступность.
Подключение MCP2515 к Arduino
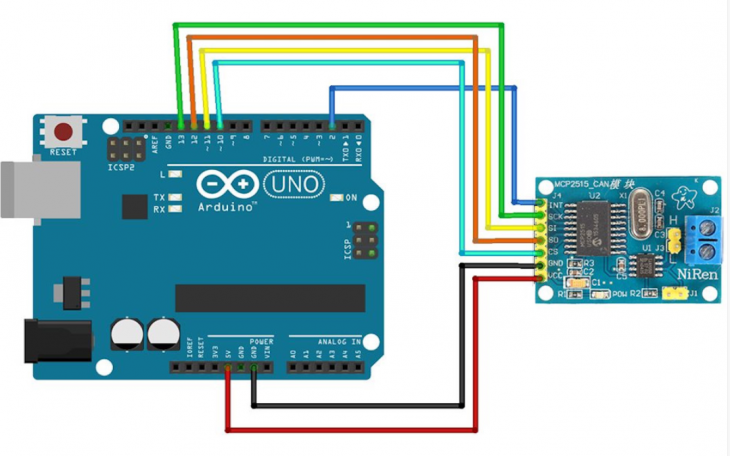
Давайте рассмотрим принципиальную схему подключения.
Для реализации несложного проекта нам понадобится такое «железо»:
- CAN контроллер MCP2515 – 2 шт.
- Плата Arduino (Uno, Nano или Mega) – 2шт.
- Макетная плата.
- Соединительные провода.
Еще более простая схема сборки:
Для прошивки и облегчения процесса программирования рекомендуем использовать специализированное ПО — CAN_BUS_Shield. Эту библиотеку необходимо скачать и инсталлировать, а именно разархивировать содержимое следует в каталог библиотек среды Arduino IDE.
Еще один популярный (альтернативный) вариант — MCP_CAN_lib
Зальем 2 скетча (под код передатчика и приемника CAN):
Как вы наверняка успели отметить, мы использовали еще один софт – библиотеку SPI (уже для управления интерфейсом). Проверьте ее наличие у себя в приложении!
Изучайте Arduino, выбирайте интересные проекты и развивайтесь в этом направлении. До скорой встречи!
Использование стандарта CAN в Arduino – полное руководство
Современные автомобили включают в себя несколько десятков разнообразных датчиков. И все эти датчики регулярно обмениваются информацией с другими датчиками/устройствами автомобиля. Причем автомобили с каждым годом становятся все «умнее» и поэтому количество датчиков в них все больше увеличивается. В автомобилях сегодняшнего дня находят широкое применение системы автономного вождения, системы безопасности с автоматически срабатывающими подушками безопасности, системы контроля давления в шинах, круиз-контроль и т.д. В большинстве случаев информация, поступающая от этих датчиков, является критически важной. Например, если сработает датчик столкновения, которому срочно нужно передать сигнал на раскрытие подушек безопасности, а ему это помешают сделать какие-либо сигналы/процессы в электронной системе автомобиля. В этом случае жизнь людей в автомобиле может оказаться под угрозой. Поэтому в автомобилях не используют такие широко распространенные в обычной электронике протоколы передачи данных как UART, SPI или I2C. Вместо них конструкторы автомобилей отдают предпочтение значительно более надежным протоколам передачи данных, таким как LIN, CAN, FlexRay и т.д.

Наибольшее распространение среди этих «надежных» протоколов получил стандарт (протокол) CAN. Этот стандарт широко применяется не только в электронных системах современных автомобилей, но и во многих других промышленных устройства, в которых критически важна надежная передача данных. Достаточно подробную информацию о стандарте CAN можно прочитать в соответствующей статье Википедии. Мы же в данной статье рассмотрим обмен данными между двумя платами Arduino с помощью протокола CAN.
Краткие сведения о протоколе CAN
CAN (Controller Area Network – сеть контролеров) представляет собой протокол (стандарт) последовательной связи, разработанный для промышленных и автомобильных приложений. Это ориентированный на обмен сообщениями протокол, используемый для связи между множеством (несколькими) устройств. Когда различные CAN устройства соединены между собой как показано на следующем рисунке, они формируют сеть, которая работает наподобие центральной нервной системы человека и позволяет любому устройству общаться с любым другим устройством в этой сети.
Читайте также: Шины marshal wintercraft suv ice ws51

CAN-сеть состоит из двух проводников (CAN High и CAN Low) и обеспечивает двунаправленную передачу данных. На практике под CAN-сетью обычно подразумевается сеть топологии «шина» с физическим уровнем в виде дифференциальной пары. Передача ведется кадрами, которые могут принимать все узлы сети. Для доступа к такой шине выпускаются специализированные микросхемы (модули) – драйверы CAN-шины.
Обычно скорость передачи по CAN-шине варьируется от 50 Кбит/с до 1 Мбит/с, а дальность связи лежит в диапазоне от 40 метров (на скорости 1 Мбит/с) до 1000 метров (на скорости 50 Кбит/с).
Формат CAN сообщений
В CAN-сети данные передаются в виде сообщений определенного формата. Этот формат состоит из большого числа сегментов, но двумя основными сегментами является идентификатор (identifier) и данные (data), которые и позволяют передавать и принимать сообщения по CAN-шине.
Идентификатор (Identifier) – также известен под именами CAN ID и PGN (Parameter Group Number). Он используется для идентификации CAN устройств в CAN-сети. Длина идентификатора составляет 11 или 29 бит в зависимости от того какой тип протокола CAN используется:
- Standard (стандартный) CAN: 0-2047 (11-bit);
- Extended (расширенный) CAN: 0-2 29 -1 (29-bit).
Data – это данные, которые необходимо передать от одного устройства другому. Длина данных может составлять от 0 до 8 байт.
Data Length Code (DLC) (длина поля данных): может принимать значения от 0 до 8 в зависимости от количества байт для передачи.
Проводники, используемые в CAN
CAN протокол работает по двум проводникам, именуемыми CAN_H и CAN_L, для передачи и приема информации. Оба проводника работают как дифференциальная линия, что означает что CAN сигнал (0 или 1) представляет собой разность потенциалов между CAN_L и CAN_H. Если эта разность положительна и больше определенного минимального уровня напряжения, то это 1, а если эта разность отрицательна – то это 0.
Обычно в протоколе CAN используется кабель с витыми жилами. Как показано на выше приведенном рисунке, на обоих концах CAN-сети включается 120-омный резистор для обеспечения баланса в линии.
Сравнение CAN с SPI и I2C
На нашем сайте мы ранее уже рассматривали использование в платах Arduino протоколов SPI и I2C, поэтому давайте сравним данные протоколы с протоколом CAN.
| Параметр | SPI | I2C | CAN |
| Скорость | 3-10 Мбит/с | стандарт: 100 Кбит/с; |
По скорости стандарт CAN не в лидерах, но его главным «козырем» является высокая надежность связи.
Применения CAN протокола
- В связи с чрезвычайно высокой надежностью и устойчивостью CAN протокола он широко применяется в автомобилях, промышленных механизмах, сельском хозяйстве, медицинском оборудовании и т.д.
- В связи с небольшим количеством используемых проводников CAN протокол исключительно удобен для применения в автомобилях.
- Устройства на основе CAN протокола отличаются низкой стоимостью.
- В CAN-сеть (шину) легко добавлять и удалять новые устройства.
Использование протокола CAN в Arduino
Поскольку платы Arduino не имеют в своем составе встроенного CAN порта, то для реализации связи между ними по данному протоколу мы будем использовать внешние CAN модули MCP2515. Эти модули подключаются к плате Arduino по интерфейсу SPI.
CAN модуль (контроллер шины CAN) MCP2515
Модуль MCP2515 включает в себя CAN контроллер MCP2515, который представляет собой высокоскоростной CAN приемопередатчик. Соединение модуля MCP2515 с микроконтроллером осуществляется с помощью интерфейса SPI, поэтому его легко подключить ко всем микроконтроллерам с данным интерфейсом.

Начинающим изучение CAN-шины целесообразно начинать именно с этого модуля ввиду его простоты и легкости подключения к большинству современных микроконтроллеров.
Основные технические характеристики модуля MCP2515:
- включает в себя высокоскоростной CAN приемопередатчик TJA1050;
- размеры модуля: 40×28mm;
- управление по интерфейсу SPI с возможностью подключения к CAN-шине нескольких устройств;
- кварцевый генератор на 8 МГц;
- сопротивление на концах 120 Ом;
- включает независимый ключ, светодиодный индикатор, индикатор мощности;
- поддерживает скорости передачи данных до 1 Мбит/с;
- низкий потребляемый ток в режиме ожидания;
- возможность подключения до 112 устройств (узлов).
Назначение контактов (распиновка) CAN модуля MCP2515 представлено в следующей таблице.
| Наименование контакта | Назначение контакта |
| VCC | контакт питания 5 В |
| GND | общий провод (земля) |
| CS | SPI SLAVE select pin (Active low) (выбор ведомого) |
| SO | SPI master input slave output lead |
| SI | SPI master output slave input lead |
| SCLK | контакт синхронизации SPI |
| INT | контакт прерывания MCP2515 |

В данном проекте мы будем передавать данные, считываемые с датчика температуры и влажности DHT11 платой Arduino Nano, плате Arduino Uno с помощью CAN модуля MCP2515.
Необходимые компоненты
- Плата Arduino Uno (купить на AliExpress).
- Плата Arduino Nano (купить на AliExpress).
- Датчик температуры и влажности DHT11 (купить на AliExpress).
- ЖК дисплей 16х2 (купить на AliExpress).
- MCP2515 CAN Module (контроллер шины CAN MCP2515) – 2 шт. (купить на AliExpress).
- Потенциометр 10 кОм (купить на AliExpress).
- Макетная плата.
- Соединительные провода.
Схема проекта
Схема проекта для связи между двумя платами Arduino с помощью протокола CAN и модулей MCP2515 представлена на следующем рисунке.
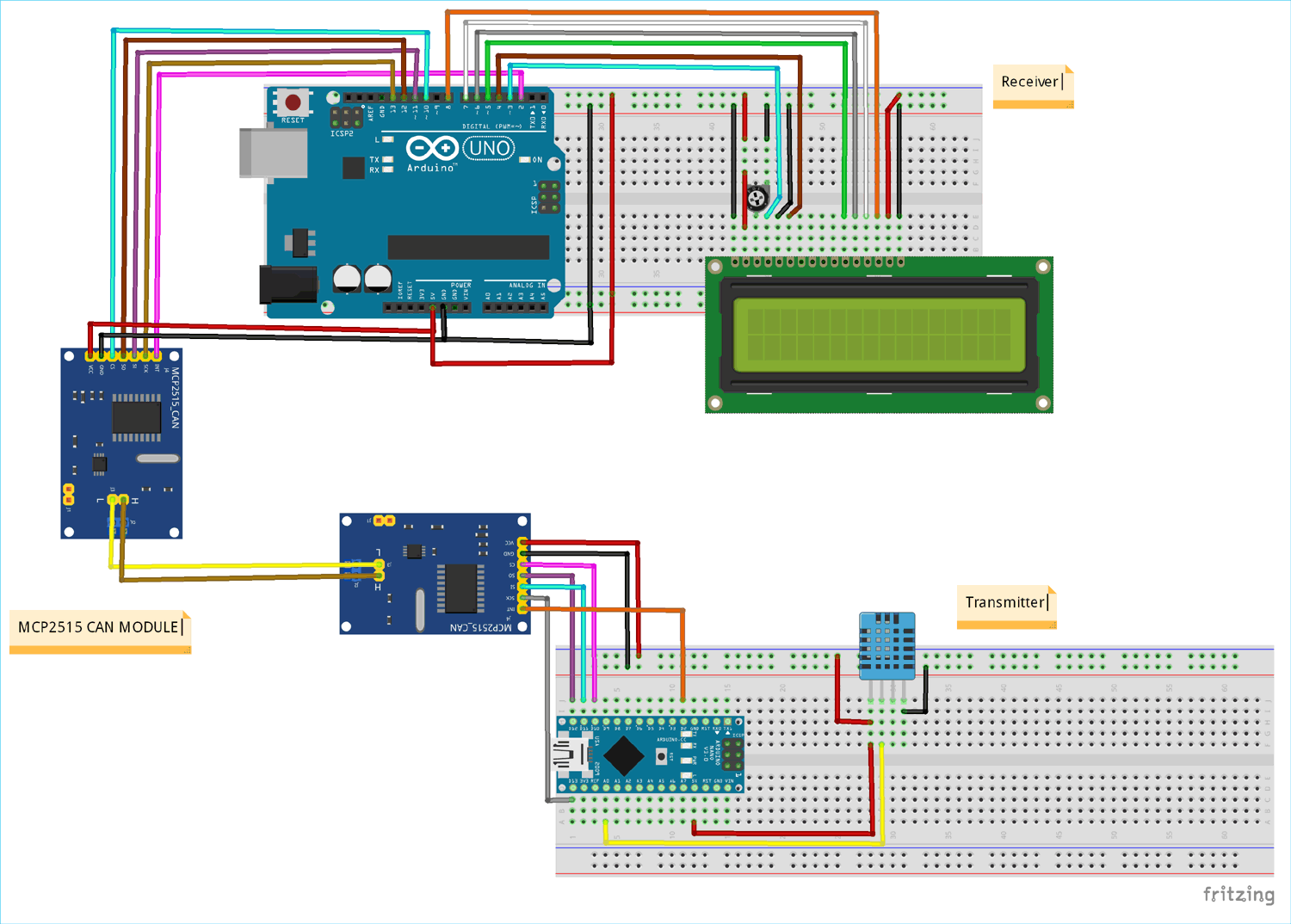
Соединения на передающей стороне:
| Компонент — контакт | Arduino Nano |
| MPC2515 — VCC | +5V |
| MPC2515 — GND | GND |
| MPC2515 — CS | D10 (SPI_SS) |
| MPC2515 — SO | D12 (SPI_MISO) |
| MPC2515 — S I | D11 (SPI_MOSI) |
| MPC2515 — SCK | D13 (SPI_SCK) |
| MPC2515 — INT | D2 |
| DHT11 — VCC | +5V |
| DHT11 — GND | GND |
| DHT11 — OUT | A0 |
Соединения на приемной стороне:
| Компонент — контакт | Arduino Uno |
| MPC2515 — VCC | +5V |
| MPC2515 — GND | GND |
| MPC2515 — CS | 10 (SPI_SS) |
| MPC2515 — SO | 12 (SPI_MISO) |
| MPC2515 — SI | 11 (SPI_MOSI) |
| MPC2515 — SCK | 13 (SPI_SCK) |
| MPC2515 — INT | 2 |
| LCD (ЖК дисплей) — VSS | GND |
| LCD — VDD | +5V |
| LCD — V0 | к среднему контакту потенциометра 10 кОм |
| LCD — RS | 3 |
| LCD — RW | GND |
| LCD — E | 4 |
| LCD — D4 | 5 |
| LCD — D5 | 6 |
| LCD — D6 | 7 |
| LCD — D7 | 8 |
| LCD — A | +5V |
| LCD — K | GND |
Соединения между двумя CAN модулями MCP2515:
| MCP2515 (Arduino Nano) | MCP2515 (Arduino UNO) |
| H | H |
| L | L |
После сборки всей схемы на макетных платах у нас получилась следующая конструкция.

Объяснение программы для Arduino
Первым делом нам необходимо установить библиотеку для работы с протоколом CAN в Arduino IDE. Сначала скачайте ZIP файл библиотеки по следующей ссылке — Arduino CAN MCP2515 Library. Затем установите ее в Arduino IDE с помощью пункта меню Sketch -> Include Library -> Add .ZIP Library.
В нашем проекте мы код программы разделим на две части: для передающей части и для приемной части. Полные коды программ приведены к конце статьи, здесь же мы кратко рассмотрим их основные фрагменты.
Инициализация CAN модуля MCP2515
Для установления соединения платы Arduino с модулем MCP2515 выполните следующую последовательность шагов. Но перед этим убедитесь в том, что указанная выше библиотека CAN MCP2515 установлена в вашу Arduino IDE.
Шаг 1. Установите номер контакта, к которому подключена линия CS интерфейса SPI (10 по умолчанию).
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле