
В бытовой техники применяют два способа хранения прошивки, первый это хранение в микросхеме ПЗУ и второй способ это хранение в процессоре, под прошивкой в данном случае мы понимаем конфигурационные данные (см. урок 1). Варианты исполнения микросхем памяти, встречающихся в бытовой технике всего два DIP и SOP, и отличаются они друг от друга только размерами
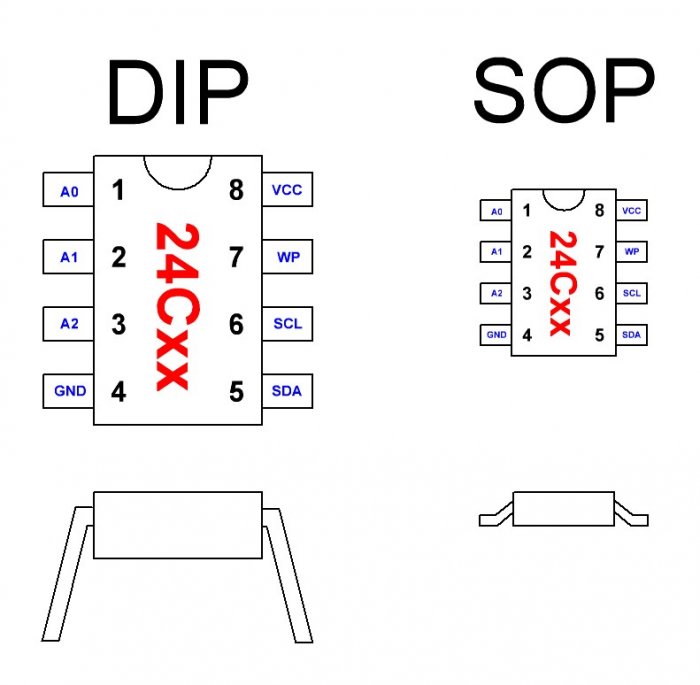
DIP (англ. dual in-line package) — тип корпуса микросхем, прямоугольной формы и имеющее два ряда выводов (от 8 до 40) по длинным сторонам. Нумерация выводов идет против часовой стрелки начиная с левого верхнего, считается более старым корпусом по сравнению с SOP.
SOP (англ. Small-Outline Package) — тип корпуса микросхем, предназначенный для поверхностного монтажа, занимает на 40-50% меньше площади на плате и меньше по высоте.

ПЗУ (Постоянное запоминающее устройство или EEPROM) один из вариантов памяти, применяемый для хранения config или хранения временных переменных, по сути это флешка на которой храниться программа для СМА. В основном встречаются микросхемы серии 24cxx (где xx объем памяти, чаще всего 64, то есть 8192 ячейки памяти, запомните это число, оно будет упомянуто далее), данные микросхемы работают по протоколу I2С.
- Шины обмена данными
- Программаторы, переходники и адапторы
- Передача данных без проблем: модемы и приемопередатчики от ON Semiconductor
- Описание используемых стандартов передачи данных
- S-FSK-модуляция. Сетка частот CENELEC A-D
- Шина CAN
- Шина LIN
- Особенности LIN
- Стандарт KNX
- Различия между традиционной проводкой и электропроводкой по KNX-технологии
- PLC-модемы NCN49597/NCN49599
- NCV7471: базовый системный кристалл
- NCN5120: KNX-приемопередатчик для сетей на основе витой пары
- Преимущества решений ON Semiconductor
- Литература
- 🎥 Видео
Шины обмена данными

I2C — шина для соединения различных интегральных устройств, с помощью двух проводов SDА (D — данные) и SCL (C — такт). Каждое подключенное устройство к данной шине Master (формирует такт и данные) или SLAVE (ведомое устройство). Напряжение в данной шине может быть либо 5V либо 3.3V. Данная технология была разработана компанией Philips еще в 80-х годах, но активно применяется и по сей день. У неё есть очень много плюсов (простота, понятность и т. д.), но и есть много минусов, о которых мы возможно поговорим более детально в расширенном курсе (Уровень 2). Кроме данной шины активно применяются в бытовой технике еще и SPI

SPI – шина с последовательным синхронным стандартом передачи данных в режиме дуплекса (двухсторонней). В отличие от I2C длина пакета данных не ограниченна 8 битами, более высокая пропускная способность, тут уже есть.
MOSI выход master (ведущий), вход slave (ведомый),
MISO вход master (ведущий), выход slave (ведомый).
SCLK (англ. Serial Clock) последовательный тактовый сигнал.
SS или CS (англ. Slave Select, Chip Select).— выбор микросхемы, выбор ведомого
Из минусов, отсутствие возможности ведомым управлять данными, контролировать их получение и наличие 4 выводов, по сравнению с двумя на I2C.
Программаторы, переходники и адапторы
Существует великое множество различных программаторов для различных типов микросхем и микроконтроллеров, но покупать их все нет необходимости, да и стоит отметить, что универсального решения Вы тоже не найдете, но за большие деньги можно поискать программатор, поддерживающий наибольшее число микросхем, но все он, всё равно, поддерживать не будет, поэтому будем искать дешевые и перекрывающие наибольшую потребность, но сначала давайте определимся, что мы будем называть программатором.
Программатор — устройство, позволяющее соединить компьютер или интерфейс пользователя (смартфон, планшет) с микросхемой памяти или микроконтроллером, для обмена данными. Тут может возникнуть много споров, так как часть подобных устройств называется отладочная плата, а другая часть вообще провод с набором деталей, но мы осознанно упростили этот момент, для более легкого усвоения материала.
Программаторы бывают для параллельного и внутрисхемного программирования (записи\чтения). Где параллельно считается соединение программатора с микросхемой / микроконтроллером, когда он находиться вне электронной платы (выпаян), а внутрисхемно — это когда выводы программатора припаиваются прямо к модулю.
Очень многие производители бытовой техники снабжают свои сервисные центры программаторами для своей продукции, но они очень узкие, но по функционалу, возможностям и удобству они очень часто превосходят свои аналоги, хоть и умеет работать только с определенным брендом.

Одна из наиболее частых проблем у начинающих это SOP корпус микросхем, которые не подходят напрямую ни в один из программаторов, которые имеют колодку с нулевым усилием на DIP корпус и тут есть два решения.
Переходник SOP – устройство позволяющее быстро и просто зажать SOP микросхему для параллельного программирования. Как правило, встречается для корпусов SOP-8 (8 ножек) или SOP-16.
Видео:MCP2515, контроллер CAN шины с интерфейсом SPIСкачать

Передача данных без проблем: модемы и приемопередатчики от ON Semiconductor
Общая безопасность систем передачи данных зависит от многих факторов, к которым относятся физическая надежность приемопередающих устройств и возможность их резервирования/вывода из сети в случае поломки; надежность канала передачи данных; помехозащищенность на уровне используемых типов модуляции/демодуляции сигнала и ряд других факторов.
В данной статье будет рассмотрено несколько новейших микросхем компании ON Semiconductor (таблица 1), предназначенных для использования в различных сетях передачи данных.
Таблица 1. Список рассмотренных микросхем
| Тип микросхемы | Назначение | Стандарт обмена данными |
|---|---|---|
| NCN49597 | PLC-модем | S-FSK модуляция Сетка частот CENELEC A-D |
| NCN49599 | PLC-модем с Phy-интерфейсом | |
| NCV7471 | LIN/CAN-приемопередатчик | LIN, CAN |
| NCN5120 | KNX-приемопередатчик для витой пары | KNX |
Видео:С чего начать ремонт ЭБУ: Типы шин данных, CANСкачать

Описание используемых стандартов передачи данных
S-FSK-модуляция. Сетка частот CENELEC A-D
S-FSK-модуляция (spread frequency shift keying, частотная манипуляция с расширением спектра) определена стандартом IEC 61334-5-1 и является усовершенствованным вариантом частотной манипуляции (FSK). При FSK-модуляции значения 0 и 1 передаются определенными частотами (как правило, синусоидального) сигнала с постоянной амплитудой. Частотная манипуляция обеспечивает большую помехозащищенность, чем амплитудная модуляция, поскольку сигнал помехи оказывает наибольшее воздействие на амплитуду сигнала, а не на его частоту.
Основное отличие между FSK и S-FSK заключается в том, что при S-FSK-модуляции разнос частот, кодирующих 0 и 1 (F0 и F1) информационной последовательности, существенно больше, чем при модуляции FSK, и составляет 10 кГц, причем это значение не зависит от скорости передачи данных. Больший разнос частот позволяет увеличить помехоустойчивость при наличии узкополосных помех и сохранить простоту реализации метода.
В стандарте IEC 61334-5-1 не регламентируются значения частот F0 и F1, которые выбираются в соответствии с рекомендациями CENELEC в зависимости от используемой полосы частот. Кроме того, в стандарте IEC 61334-5-1 приведены спецификации физического (PHY) уровня и канального подуровня MAC (Media Access Control) для PLC-систем с S-FSK-модуляцией.
Сетка частот CENELEC, принятая Европейским комитетом по электротехнической стандартизации (European Committee for Electrotechnical Standardization), регулирует низкочастотную передачу данных в диапазоне 0…500 кГц и разбита на четыре полосы (A-D), которые описаны в таблице 2.
Таблица 2. Сетка частот Cenelec
| Сетка | Диапазон частот, кГц | Назначение |
|---|---|---|
| Cenelec A | 0…95 | Исключительно для поставщиков электроэнергии |
| Cenelec B | 95…125 | Открыты для использования любыми приложениями |
| Cenelec C | 125…140 | |
| Cenelec D | 140…148 |
Для сеток Cenelec A, B, D уровень протокола определяется стандартами или патентами. Для сетки Cenelec C определен доступ по стандарту CSMA (Carrier Sense Multiple Access, Множественный доступ с контролем несущей).
Читайте также: При коротком замыкании шины can
Шина CAN
Шина CAN (Controller Area Network) была предложена Робертом Бошем (Robert Bosch) в 80-х годах для автомобильной промышленности, затем стандартизована ISO (ISO 11898) и SAE (Society of Automotive Engineers). В настоящее время большинство европейских автомобильных концернов (например, Audi, BMW, Renault, Saab, Volvo, Volkswagen) используют ее в системах безопасности, обеспечения комфорта и управления движением. В Европе вводится единый интерфейс для систем компьютерной диагностики автомобиля, который разрабатывается на базе шины CAN. В ближайшее время в каждом автомобиле европейского производства будет хотя бы один узел, поддерживающий этот интерфейс.
CAN представляет собой асинхронную последовательную шину, использующую в качестве среды передачи обычную витую пару проводов. При скорости передачи 1 Мбит/с длина шины может достигать 30 м. Максимальная длина шины, в соответствии со стандартом, составляет 1 км. При необходимости обмениваться информацией на больших расстояниях используются мосты и повторители. Теоретически число подсоединяемых к шине устройств не ограничено, практически — до 64. Это обусловлено нагрузочной способностью стандартных приемопередатчиков. Шина не имеет выделенного мастера, поэтому управлять ею могут сразу несколько устройств. Основные характеристики шины CAN приведены в таблице 3.
Таблица 3. Характеристики шины CAN
| Параметр | Значение |
|---|---|
| Топология | Последовательная шина, с обоих концов линии стоят заглушки с сопротивлением 120 Ом |
| Среда передачи данных | Витая пара с волновым сопротивлением 120 Ом |
| Обнаружение ошибок | 15-битный CRC-код |
| Локализация ошибок | Различают ситуации с постоянной и временной ошибкой. Устройства с постоянной ошибкой отключаются от шины |
| Текущая версия | CAN 2.0B |
| Скорость передачи, Мбит/с | До 1 |
| Длина шины, м | До 30 (при максимальной скорости передачи) |
| Количество устройств на шине | 64 (теоретически не ограничено) |
Существует две версии шины CAN:
1. Версия А задает 11-битную идентификацию сообщений (максимум 2048 функций).
2. Версия B задает 29-битную идентификацию сообщений (максимум 536 млн. функций).
Версия В, часто именуемая FullCAN, все больше вытесняет версию А, которую называют также BasicCAN.
Сеть CAN состоит из узлов с собственными тактовыми генераторами. Любой узел сети CAN посылает сообщение сразу всем системам, подсоединенным к шине, которые при получении сообщения решают, относится ли оно к данному блоку. Для этого в CAN-контроллерах имеется аппаратная фильтрации сообщений. Таким образом одна посланная команда может привести в действие для своего выполнения произвольное количество подсистем. Если исполнителей команды много, то такой способ передачи и обработки команд обеспечит значительный выигрыш по сравнению с адресным способом.
Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате образуется общая нагрузка шины CAN. Общее сопротивление нагрузки зависит от числа подключенных к шине электронных блоков управления и исполнительных механизмов. Следует учитывать, что при выключении питания происходит отключение нагрузочных резисторов модулей, подключенных к CAN-шине.
Основные неисправности CAN-шины связаны с замыканием/обрывом линий (или замыканием нагрузочных резисторов на них), снижением уровня сигналов на шине, нарушениями в логике ее работы. В последнем случае поиск дефекта может обеспечить только анализатор CAN-шины.
В мире производится множество типов CAN-контроллеров, которые имеют общую структуру:
- Обработчик протокола (CAN protocol handler)
- Фильтр сообщений
- Память для сообщений
- Интерфейс с ЦП.
Во многих современных микроконтроллерах имеется встроенный контроллер шины CAN.
Шина CAN продолжает развиваться в нескольких направлениях. В новом проекте стандарта предполагается увеличить скорость передачи данных, так как в автомобиле появилось много компьютерных подсистем, связанных с передачей аудио- и видеоинформации. Необходимость повышения надежности требует введения дублированной шины CAN.
Шина LIN
Для низкоскоростной электроники до недавнего времени никаких стандартов не было, и каждый производитель был вынужден придумывать свои собственные системы. Для решения задач обмена данными в таких системах был утвержден стандарт LIN.
Технические требования протокола LIN (Local Interconnection Network) разработаны и утверждены Европейским автомобильным консорциумом как дешевое дополнение к сверхнадежному протоколу CAN. Протокол LIN предназначен для низкоскоростного (до 20 кбит/с) обмена данными на короткие расстояния. Он служит для передачи входных воздействий, состояний переключателей на панелях управления и так далее, а также ответных действий различных устройств, соединенных в одну систему через LIN, происходящих в так называемом «человеческом» временном диапазоне (порядка сотен миллисекунд). Основные задачи, возлагаемые на стандарт LIN консорциумом европейских автомобильных производителей — объединение автомобильных подсистем и узлов (таких как дверные замки, стеклоочистители, стеклоподъемники, управление магнитолой и климат-контролем и так далее) в единую электронную систему.
Стандарт LIN включает технические требования на протокол и на среду передачи данных. Как последовательный протокол связи, LIN эффективно поддерживает управление электронными узлами в автомобильных системах с шиной класса «А» (двунаправленный полудуплексный), что подразумевает наличие в системе одного главного (master) и нескольких подчиненных (slave) узлов.
Особенности LIN
Протокол LIN поддерживает двунаправленную передачу данных по одному проводу длиной до 40 м, используя недорогой микроконтроллер с генератором на RC-цепочке, без кварцевого резонатора. Идеология стандарта — как можно больше задач переложить на программное обеспечение с целью уменьшения стоимости конструкции. При каждом сеансе обмена данными контроллеры автоматически проводят самосинхронизацию. В основу LIN положена концепция «single-master/multi-slave», обеспечивающая дешевое исполнение, основанное на стандартных последовательных периферийных модулях UART/SCI.
Шину LIN можно перевести в режим микропотребления (Sleep mode), когда она выключается (переходит в состояние с высоким импедансом). Любой узел на шине, при необходимости, может включить ее вновь. Протокол LIN отличается от шины CAN низкой стоимостью за счет пониженной эффективности. Структура шины представляет собой нечто среднее между I 2 C и RS-232. Шина подтягивается к источнику питания через резистор, установленный в каждом узле, и вниз через открытый коллекторный переход приемопередатчика, как в I 2 C. Вместо линии тактирования каждый передаваемый байт обрамляется стартовым и стоповым битами и передается асинхронно, как в протоколе RS-232.
Диапазон изменений напряжения питания лежит в пределах 9…18 В, но все узлы должны выдерживать перегрузки и сохранять работоспособность при увеличении напряжения на шине вплоть до 40 В. Микроконтроллер (который может иметь обычное напряжение питания 3,3 или 5 В) в каждом узле подключается к шине через приемопередатчик, который и обеспечивает необходимую защиту от перегрузок.
Протокол LIN, ввиду своей простоты и невысокой скорости обмена данными, допускает как программную, так и аппаратную реализацию.
Стандарт KNX
Стандарт KNX появился путем соединения нескольких европейских шинных систем. Среди них Европейская установочная шина EIB (European Installation Bus), которая с 1992 года начала успешно завоевывать рынок. Популярность стандарта EIB привела к тому, что на его базе в мае 1999 года произошло слияние трех европейских систем (EIB, BatiBus, EHS) в один стандарт KNX. Владельцем уже мирового стандарта KNX является международная ассоциация Konnex Association (в прошлом EIBA). Помимо разработки стандартов и норм, ассоциация занимается контролем качества и совместимости продукции от разных производителей, согласованием рекламной и торговой политики фирм-производителей, имеющих право на использование торгового знака KNX/EIB.
Читайте также: Зимняя резина марка шин
Стандарт KNX поддерживается десятками ведущих европейских производителей электротехнической продукции, что обеспечивает возможность работы в одной KNX-системе устройств различных производителей.
Шина KNX является единственным общемировым открытым стандартом в области автоматизации управления от квартиры до группы зданий. Кроме того, KNX является лидирующим стандартом автоматизации зданий и широко используется во всем мире для конструирования «умных домов» и «интеллектуальных зданий».
Установочная шина KNX/EIB представляет собой распределенную систему, для которой не требуется шинный контроллер (master). Все устройства на шине соединяются в сеть одним сигнальным кабелем типа «витая пара». Прокладывается и подключается сразу два кабеля: по одной паре проводов передается сигнал; вторая пара — резервная.
Как правило, шинная система KNX/EIB включает в себя следующие элементы:
- KNX-датчики, которые измеряют и подают сигнал о состоянии, например выключатели, панели управления, термостаты, датчики протечки или датчики открытия окон/дверей;
- KNX-актуаторы, или «исполнители», которые выполняют команды, например актуаторы жалюзи, светорегуляторы, клапаны перекрытия воды, актуаторы-выключатели;
- системные устройства, такие как блоки питания, соединители линий, различные модули логики, IP-маршрутизаторы, GSM-шлюзы;
- KNX-шина, «сигнальная линия», которая обеспечивает питанием слаботочные компоненты системы и одновременно служит физической средой для передачи данных.
Для обмена информацией в системе KNX используются четыре среды передачи данных: передача данных через шину; передача данных по электросети с помощью PLC-модемов; передача данных по радиоканалу (частота 868 МГц); передача данных по сети Ethernet.
Для примера использования KNX-технологии рассмотрим различия между традиционной электропроводкой и KNX-электропроводкой.
Различия между традиционной проводкой и электропроводкой по KNX-технологии
В традиционной электропроводке (220 В) потребители включаются/выключаются с помощью обычных выключателей, для чего требуется прокладка силового кабеля (220 В) к каждому выключателю и потребителю.
В KNX-системе силовая электропроводка (220 В) прокладывается только между исполнительными устройствами шины (актуаторами) и потребителями, а все датчики (выключатели, термостаты и др.) с актуаторами соединяются низковольтной (30 В) слаботочной KNX-шиной. Благодаря этому силовая часть выполняется без обходных путей, что уменьшает расход силового кабеля, количество соединений, потерь, избавляет от необходимости прокладки дополнительных каналов для силового кабеля и, как следствие, снижает вероятность возникновения короткого замыкания, пожара.
При традиционной электропроводке для каждого потребителя или группы потребителей прокладывают отдельный кабель, а для каждой прикладной системы управления (охранной, противопожарной, системы доступа) — отдельную кабельную сеть, что уже сейчас воспринимается как архаизм. Широкий ассортимент разработанных устройств позволяет автоматизировать все системы жизнеобеспечения в здании и на прилегающей территории (освещение, отопление, охрана, вентиляция, поливка газонов и др.) и объединить их в единую управляемую сеть инфраструктуры.
Помимо экономии проводов, KNX-системы обладают и другими преимуществами:
- На порядок упрощается электроустановка в здании.
При этом значительно сокращаются затраты на ее проектирование и прокладку, поскольку у силовых кабельных сетей остается лишь одна задача — подвод электропитания к потребляющим устройствам.
- Беспроблемное расширение или изменение системы.
В случае изменения назначения помещений устройства шины просто переставляются или перепрограммируются без прокладки новых проводов.
- Простое и удобное управление устройствами
Способствует созданию комфортных условий в доме и приводит к существенной экономии средств при рациональном расходе энергоресурсов.
Управлять KNX-системами можно как локально (в отдельном помещении), так и централизованно (с диспетчерского пульта или компьютера). Кроме того, несложно организовать удаленное управление с мобильного телефона с помощью SMS или через сеть Интернет.
Перейдем к рассмотрению продукции ON Semiconductor.
Видео:Цифровая шина НЕРВ. Обмен информацией между устройствами РЗА.Скачать

PLC-модемы NCN49597/NCN49599
Микросхемы NCN49597/49599 — это PLC-модемы, удовлетворяющие спецификации IEC 61334-5-1 и использующие S-FSK-модуляцию для надежного обмена данными на низких скоростях по силовым линиям. Обе микросхемы построены на базе процессора с ядром ARM Cortex M0 и включают MAC-уровень. NCN49599 содержит, кроме этого, приемопередатчик физического уровня, что позволяет строить на ней однокристальные PLC-модемы. Для изготовления NCN49597 используется технология смешанных сигналов ON Semiconductor, позволяющая объединять цифровые и аналоговые схемы на одном кристалле ИС.
На рисунке 1 приведена схема включения PLC-модема NCN49597, а в таблице 4 — его основные параметры.
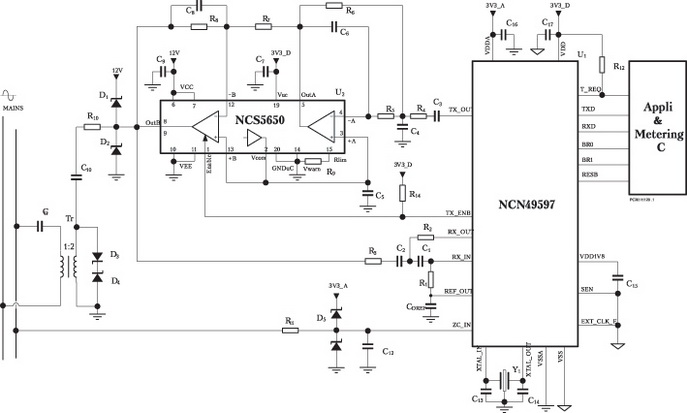
Рис. 1. Схема включения PLC-модема NCN49597
Таблица 4. Основные параметры PLC-модемов NCN49597/49599
| Параметр | Значение |
|---|---|
| Назначение | Полудуплексный PLC-модем |
| Частота питающей сети, Гц | 50 и 60 |
| Модуляция | Два канала с S-FSK-модуляцией |
| Максимальная скорость обмена, бод | 4800 на канал; 9600 в режиме двух каналов |
| Встроенный процессор | Cortex M0 |
| Тип ПО | Программируемое встроенное ПО |
| Сертификация | IEC 61334-5-1 и CENELEC EN 50065-1 |
| Программируемый диапазон частот | CENELEC A-D |
| Программируемая скорость обмена (частота сети) | 300, 600, 1200, 2400, 4800 бод (50 Гц); 360, 720, 1440, 2880, 5760 бод (60 Гц) |
| Обеспечение надежности обмена | Повтор сообщений и алгоритм интеллектуальной синхронизации |
| Интерфейс ко внешнему микроконтроллеру | SCI: UART/Full Duplex UART |
| Защита от сбоев | Функция аварийной сигнализации |
| Скорость обмена по SCI-интерфейсу, кбод | 9,6; 19,2; 38,4; 115,2 |
| Напряжение питания, В | 3,3 |
| Рабочий температурный диапазон, °C | -40…125 |
PLC-модемы NCN49597/49599 находят широкое применение в автоматизированных системах удаленного считывания информации с датчиков, удаленном управлении охранными системами и уличным освещением.
На рисунке 2 показан пример использования PLC-модемов NCN49597/49599
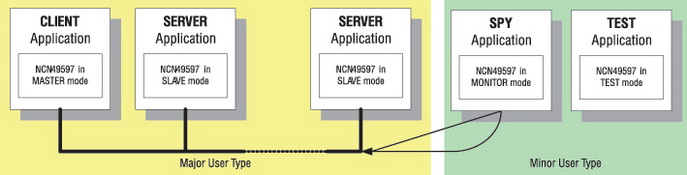
Рис. 2. Пример использования PLC-модемов NCN49597/49599
NCN49597/49599 предназначены для подключения оборудования с использованием DLC-сетей (Distribution Line Carrier). Они могут обслуживать два главных и два вспомогательных типа приложений.
- Мастер (ведущий) или Клиент:
Мастер является клиентом в системе сбора данных от одного или нескольких ведомых, подключенных к силовой линии. Он собирает данные от ведомых устройств и управляет ими. Типичным примером приложения является концентратор систем сбора данных.
Ведомый поставляет данные Мастеру. Типичным примером использования является счетчик электроэнергии с PLC-модемом.
Вспомогательные типы приложений:
- Системы наблюдения или мониторинга:
Системы наблюдения или мониторинга используются только для наблюдения за данными, которые циркулируют по силовым сетям. В них проверяется корректность только физического уровня фреймов. Если фрейм безошибочный, то данные передаются на обработку внешнему процессору.
Режим программного тестирования используется для проверки соответствия PLC-модема спецификации CENELEC. EN 50065-1 путем непрерывного широкополосного вещания fS или fM.
Видео:Как работает LIN шина автомобиля. K-Line L-Line шины данных. Лин шина автомобиля. Lin-bus networkСкачать

NCV7471: базовый системный кристалл
NCV7471 — это базовый системный кристалл (System Basis Chip, SBC), объединяющий функции, типичные для автомобильных электронных блоков управления (Electronic Control Units, ECUs). На NCV7471 реализуют управляемые низковольтные источники питания для микроконтроллерных приложений и других типов нагрузки, системы мониторинга прикладного ПО посредством сторожевого таймера (watchdog). Микросхема имеет встроенные высокоскоростные CAN- и LIN-приемопередатчики, которые позволяют ECU управлять множеством коммуникационных точек или работать в качестве маршрутизатора. Встроенный контроллер состояния обеспечивает безопасную последовательность включения микросхемы и поддерживает работу в режимах пониженного энергопотребления с конфигурируемым набором функций, включая пробуждение от сигналов на линиях обмена данными или локального цифрового сигнала WU. Состояние ряда внутренних блоков NCV7471 можно прочитать посредством микроконтроллера через SPI-интерфейс или использовать для генерации запросов на внешние прерывания. На рисунке 3 приведена блок-схема, а в таблице 5 — основные функциональные особенности NCV7471.
Читайте также: Can шина уаз патриот 2011
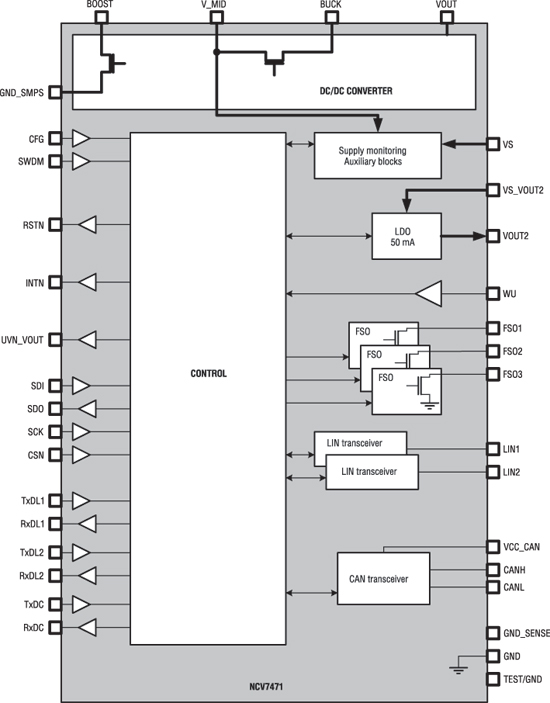
Рис. 3. Блок-схема NCV7471
Таблица 5. Основные функциональные особенности NCV7471
| Управляющая логика | Обеспечивает безопасную последовательность включения и корректирует реакцию на различные условия электропитания Управляет режимом обмена данными, включая управление электропитанием и обработку сигналов вывода из режима пониженного энергопотребления, локального пробуждения (через вывод WU) и циклического пробуждения (с использованием встроенного таймера) Генерирует сигнал сброса и запросы на прерывания |
| Последовательный периферийный интерфейс (SPI) | Работает с 16-битными фреймами Обеспечивает обмен данными с микроконтроллерным блоком ECU Через восемь 12- битных регистров осуществляется выбор режимов работы, снятие информации о состоянии микросхемы и работа со сторожевым таймером (watchdog) |
| Напряжение питания 5 В VOUT от DC/DC-преобразователя | Может обеспечить выходной ток до 500 мА при стабильности 2% Может использоваться для питания микроконтроллера ECU Пригодно для старт-стоповых систем с напряжением батареи питания не менее 2,5 В |
| 5 В VOUT2 выходной стабилизатор с низким падением напряжения | Может обеспечивать питание внешних устройств, например, датчиков Управляется через SPI-интерфейс и машину состояний Защищен от короткого замыкания аккумулятора автомобиля |
| Высокоскоростной CAN-приемопередатчик | Соответствует ISO11898 Защищает от доминантного таймаута по линии TxD |
| Два LIN-приемопередатчика | Соответствуют LIN2.1 и J2602 Защищают от доминантного таймаута по линии TxD |
| Вход пробуждения WU | Чувствительный к перепаду уровня высоковольтный вход Может использоваться как источник сигнала пробуждения микросхемы или как логический вход, опрашиваемый через SPI |
| Функции защиты и мониторинга | Мониторинг силовой линии в точке V_MID Мониторинг выхода источника питания VOUT с программируемым порогом Диагностика источника питания VOUT2 через SPI-интерфейс и прерывание Предупреждение о перегреве и температурная защита Программируемый сторожевой таймер (watchdog) для мониторинга ПО ECU |
Основное применение NCV7471 находит в системах управления шасси автомобиля
Видео:CAN шина👏 Как это работаетСкачать

NCN5120: KNX-приемопередатчик
для сетей на основе витой пары
NCN5120 — это первая ИС в семействе KNX-приемопередатчиков от ON Semiconductor, поддерживающая протоколы приема и передачи по KNX-шине. Микросхема представляет собой KNX-сертифицированный EIB-приемопередатчик, имеющий встроенные PHY- и MAC-уровни (TP1-256). Скорость обмена по шине KNX составляет 9600 бод. При обмене данными, интерфейс (UART/SPI) к хост-контроллеру и скорость обмена выбирается программным способом.
На рисунке 4 приведена блок-схема NCN5120.
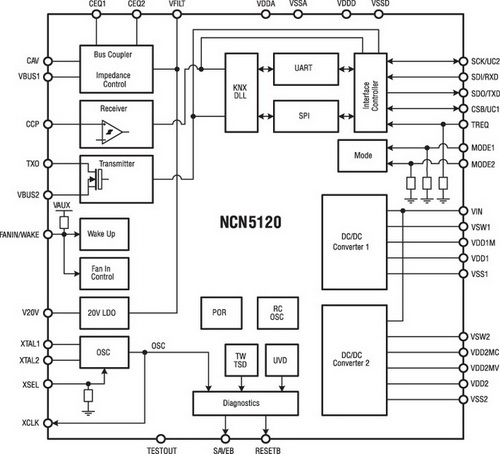
Рис. 4. Блок-схема NCN5120
Выбор интерфейса и скорости обмена данными осуществляется согласно таблице 6.
Таблица 6. Выбор интерфейса обмена данными для NCN5120
| TREQ | MODE2 | MODE1 | SCK/UC2 | CSB/UC1 | SDI/RXD | SDO/TXD | Описание режима работы |
|---|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | RXD | TXD | 9-бит UART, 19200 Бод |
| 0 | 0 | 0 | 0 | 1 | 9-бит UART, 38400 Бод | ||
| 0 | 0 | 0 | 1 | 0 | 8-бит UART, 19200 Бод | ||
| 0 | 0 | 0 | 1 | 1 | 8-бит UART, 38400 Бод | ||
| 1 | 0 | 0 | X | X | Драйвер | Приемник | Аналоговый режим |
| TREQ | 0 | 1 | SCK (выход) | CSB (выход) | SDI | SDO | SPI Master, 125 кБод |
| TREQ | 1 | 0 | SPI Master, 500 кБод |
Система тактирования позволяет работать от недорогого кварца 16 МГц, являющегося промышленным стандартом. Микросхема имеет возможность генерации тактовой частоты 8/16 МГц для внешнего MCU.
Специальный супервизор позволяет отслеживать напряжения на шине KNX. При передаче осуществляется буферизация передаваемых фреймов данных. С целью повышения надежности обмена данными возможно включение функции конфигурируемого количества повторов и опционального автоответчика. Кроме того, возможна работа в аналоговом режиме. В состав NCN5120 входит конфигурируемый входной разветвитель, позволяющий организовать до двух виртуальных узлов, и токовые петли.
Микросхема имеет встроенный линейный стабилизатор 20 В и два высокоэффективных DC/DC-преобразователя с нагрузочной способностью до 100 мА каждый, снабженные системой управления и мониторинга. Эти преобразователи вырабатывают фиксированное напряжение 3,3 В и регулируемое напряжение 3,3…21 В. В NCN5120 имеется режим пониженного энергопотребления (Sleep Mode).
NCN5120 идеально подходит для силовых приложений. Микросхема может использоваться для уменьшения количества элементов конструкции, поддерживая безопасное и надежное подключение к шине благодаря своим особенностям, таким как выбираемый наклон характеристики системы защиты по току, мониторинг напряжения на шине и температуры.
Рабочий температурный диапазон составляет -25…85°C
К основным преимуществам NCN5120 по сравнению с подобными микросхемами других производителей можно отнести высокий уровень интеграции и низкую стоимость внешних компонентов, возможность подключения мощных устройств к KNX-шине и питания от нее, наличие уникальных возможностей при создании улучшенных KNX-систем и гибкость при интеграции в имеющуюся инфраструктуру.
К основным приложениям можно отнести системы домашней автоматизации, а также системы автоматизации зданий и сооружений. Микросхема NCN5120 может использоваться в различных конечных продуктах, таких как интеллектуальные светильники и переключатели, вентиляторы и кондиционеры, термостаты, детекторы дыма и системы пожарной сигнализации.
Видео:03. Основы устройства компьютера. Память и шина. [Универсальный программист]Скачать
![03. Основы устройства компьютера. Память и шина. [Универсальный программист]](https://i.ytimg.com/vi/mjiJutISb6U/0.jpg)
Преимущества решений
ON Semiconductor
Компания ON Semiconductor является мировым лидером по повышению энергоэффективности и поставляет решения, которые производят, распределяют, потребляют, преобразуют энергию, а также осуществляют мониторинг и управление. На рынок поставлено уже более 5 миллионов PLC-модемов для интеллектуальных энергетических систем. Продукция компании отвечает ведущим мировым стандартам, таким как IEC61334-5-1. Номенклатура микросхем для систем обмена данными и защиты силовых линий покрывает практически все сегменты рынка приложений для интеллектуальных систем сбора и обработки данных, основные из которых приведены в таблице 7. Особое внимание уделяется повышению надежности и безопасности решений.
Таблица 7. Микросхемы ON Semiconductor для систем обмена данными
| Применение | Тип обмена данными | Защита | ||||||
|---|---|---|---|---|---|---|---|---|
| PLC | Беспроводной | Проводной | Защита по току | |||||
| Узкополосный PLC-модем | KNX PLC-модем | ZigBee | Mbus (проводной) | KNX TP | CAN | HART/ ProfiBus | Устройства защитного отключения (УЗО) | |
| AMIS30585 AMIS49587 NCN49597 NCN49599 NCN49598 | NCN49597 NCN49599 | NCS36510 | NCN5150 NCN5151 | NCN5120 | AMIS42670 AMIS42671 AMIS42673 AMIS42675 AMIS42770 | A5191HRTLG A5191HRTPG A5191HRTN NCN5192 AMIS49200 AMIS49250 | NCS37000 NCS37005 NCS37010 NCS37012 NCS38000 | |
| Интеллектуальные измерительные системы | + | — | + | + | + | — | — | — |
| Автоматизация зданий | + | + | + | — | + | — | — | — |
| Интеллектуальные системы освещения | + | + | + | — | — | — | — | |
| PV-панели | + | + | + | — | + | — | — | + |
| Уличное освещение | + | + | — | — | — | — | — | — |
| Зарядные устройства для электромобилей | + | — | — | — | — | + | — | + |
| Системы управления процессами | — | — | + | — | — | + | + | — |
| Крупногабаритная бытовая техника | — | + | + | — | — | — | — | + |
| Системы электрической безопасности | — | — | — | — | — | — | + | — |
| Промышленные установки | — | — | — | — | — | + | — | — |
Видео:Микросхемы и программаторы, Шины I2C и SPIСкачать

Литература
10. Андрей Самоделов. Сюиты длясчетчика и сети: PLC-решения от ON Semi и STMicro//Новости Электроники №7/2011
11. Андрей Самоделов. Концерт для счетчика и сети: PLC-модемы компании Texas Instruments//Новости Электроники №7/2011
12. Андрей Самоделов.На замену AMIS: новый универсальный PLC-модем компании ON Semiconductor//Новости Электроники №3/2012.
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле
🎥 Видео
лекция 403 CAN шина- введениеСкачать

Демонстрация управления системой с использованием шины CANСкачать
С чего начать ремонт ЭБУ: Типы шин данных, k lineСкачать
Цифровые интерфейсы и протоколыСкачать
АЗЫ ДИАГНОСТИКИ. Шины передачи данных. Часть 3. Шина LinСкачать
Передача данных - шина SPIСкачать
Экспресс диагностика CAN шины на автомобиле. №21Скачать
Lin-scan (Анализатор ЛИН шины)Скачать
Работа с логическим анализатором цифровой шины данныхСкачать
Урок №18. Цифровые интерфейсы современного автомобиля: шины данных CAN и LINСкачать
Протокол обмена данными 1-Wire (Microlan)Скачать
Установка бесконтактного считывателя CAN-шины Eurosens InCANСкачать
поиск нерабочей can шины, часть дваСкачать












