
Современная силовая электроника это про большие мощности, преобразуемые на высокой частоте и с высокой удельной плотностью. Сегодня на рынке уже можно встретить источники питания с плотностью мощности более 13 W/cm^3 — это примерно 2кВт в размере чуть более пачки от сигарет. Экспериментальные и лабораторные образцы показывают еще более высокой результат.
Рис.1. Пример преобразователя с высоким показателем плотности энергии
Ключом к достижению такого высокого уровня энергетической плотности является в том числе и оптимизация компоновки элементов преобразователя с учетом паразитных свойств печатных проводников.
У меня есть проект многофазного преобразователя, в котором каждая фаза выполнена в виде отдельного модуля, а питание подводится через кросс-плату. Частота работа модуля
300 кГц, а средний потребляемый ток более 100А. Источником энергии питающим устройство выступает АКБ, способная работать с большим разрядным током.
При таких вводных, крайне важно:
доставлять энергию из АКБ к фазному модулю с минимальными потерями напряжения на паразитной индуктивности ESL и сопротивлении ESR подводящей цепи.
иметь качественную модель всего устройства, для максимально-приближенного моделирования работы схемы. Не учитывая паразитные параметры подводящих цепей можно сильно промахнуться с работоспособностью устройства
В моем случае мне нужно было узнать значения ESL и ESR для кросс-платы между точками входа и выхода тока. Кросс-плата с одним установленным фазным модулем представлена на рисунке рис.2.
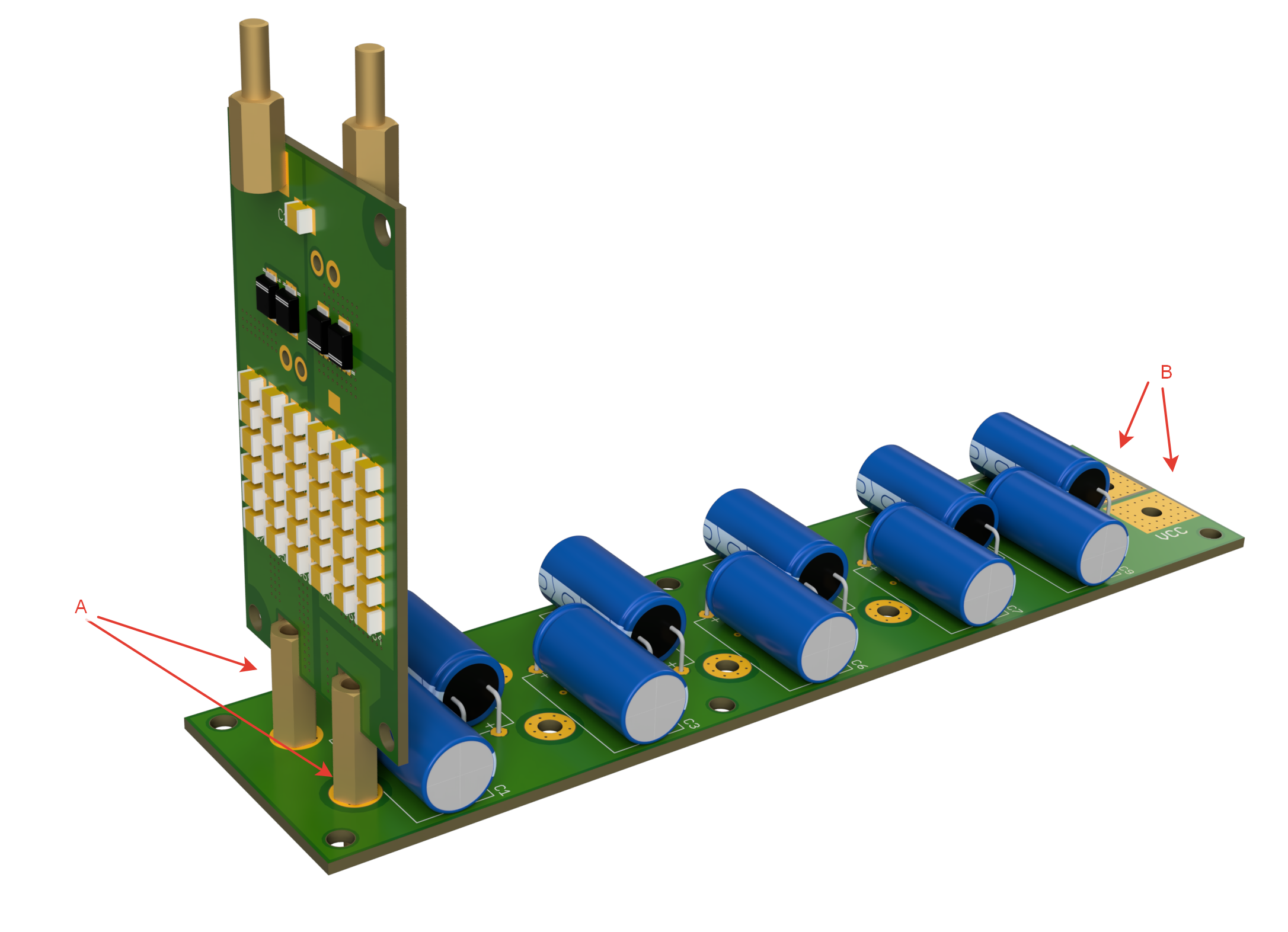
Рис.2. Кроссплата с фазным модулем
На изображении терминалы В — это входные терминалы с током, терминалы А — это точки подключения потребителя тока, самого дальнего в данном случае.
Для начала пришлось переработать кросс-плату, убрать все лишние и оставить только проводящую цепь от точки В до точки А. Медь на ПП имеет толщину 35мкм.
Рис.3. Проводящая цепь в Solidworks
Далее я экспортировал модель в формате STEP-2014 и импортировал её в чистый проект Maxwell. Мне нужно было провести моделирование с учетом скин-эффекта, по этому в Maxwell был выбран решатель Eddy Current: Maxwell 3D -> Solution type -> Eddy current
Рис.4. Импорт печатного проводника в Maxwell и выбор типа решателя
Далее необходимо провести ряд настроек в проекте:
1) задать материал тела проводящего ток, в моем случае это медь — copper:
Рис.5. выбора материала тела
2) Задать регион моделирования — регион нужно задать таким образом, чтоб он соприкасался только с терминалами тока!
Ри.6. Регион ( область ) моделирования
3) Задать источник возбуждения — источник тока, путем создания двух терминалов. Выбрать поверхность которая будет выступать источником тока, ПКМ -> Asign Excitation -> Current -> Задать величину тока, направление, имея этого терминала. Не забываем что у цепи с током должен быть вход и выход ( направление тока в терминалах ) — два терминала.
4) Для расчета индуктивности также необходимо задать матрицу для проводящего тела:
Рис.7. Задача матрицы для определения индуктивности
5) Задать сетку для проводника и для региона по отдельности. Для региона можно задать Inside based, для теля можно задать с учетом скин-эффекта — но считаться такой вариант будет дольше.
6) Определить условия моделирования — Analysis -> выбрать точность расчета, частоту тока, колл. подтверждающих шагов расчета.
По окончанию всех настроек, окно с параметрами должно иметь примерно такой вид:
Рис.8. Вид предварительно настроенного проекта перед моделированием.
Далее ПКМ на проект и сначала Validation check, после Analyze All и ждем пока будет произведен расчет.
Рис.9. валидация и запуск моделирования
По результату моделирования можно посмотреть заветные цифры: L и R с учетом скин-эффекта: ПКМ на Results -> Create data table -> выбрать L и R.
Рис.10. Результат моделирования участка с током
Также можно вывести разные красивые карты и наложить их на модель, например карту плотности тока в векторной форме.
Рис.11. Карта плотности тока в векторной форме.
Рис.11. Карта плотности тока в векторной форме.
В изначальной версии статьи была ошибка, связанная с некорректным заданием региона моделирования, в результате были получены неверные значения ESL = 2nH и ESR = 833uOm. Пришлось задать заново регион моделирования, таким образом чтоб он соприкасался только терминалов тока, и запустить расчет заново. В результате были получены более адекватные значения ESL =28.6nH и ESR = 3.14mOm . Эти данные пригодятся для уточнения модели устройства в Spice, по ним можно спрогнозировать потери энергии на этом отрезке цепи, а также получить более точную модель распределения напряжения питания.
Читайте также: Что такое коэффициент умножения частоты системной шины
На самом деле, в ANSYS есть и другие инструменты позволяющие проводить моделирование печатных проводник на переменном токе с учетом электромагнитных явлений, но их освоение еще впереди.
Ansys предоставляет возможность бесплатно использовать программный пакет Ansys Electronics Desktop, с некоторыми ограничениями ( размер сетки, вычислительные ресурсы ) на базе бесплатной студенческой лицензии. Ознакомиться скачать можно по ссылке
Как быть с резинами?
Уплотнения, работающие при относительно малых давлениях, часто изготавливают из материалов, поведение которых может сильно отличаться от известного поведения сталей. Детали из эластомеров обычно моделируют при помощи специальных моделей для гиперупругих материалов, и причин тому несколько:
- Материал практически всегда ведёт себя упруго, а это значит, что нагрузка и разгрузка происходят по одной кривой напряжений-деформаций. Никакой пластики, привычной для металлов, нет.
- Зависимость напряжений от деформаций очень нелинейная и различается для областей растяжения и сжатия. При растяжении жёсткость обычно увеличивается медленно, тогда как при сжатии – гораздо быстрее.
- Такое свойство как несжимаемость в той или иной степени характерно для гиперупругих материалов. Оно означает, что коэффициент Пуассона близок или равен 0,5 уже при начале деформирования.

Получение точного решения нелинейной задачи, включающей описание поведения гиперупругого материала, часто является проблемой для инженера. Ниже приведены несколько советов, на которые стоит обратить внимание при решении таких задач.
Данные испытаний материала
Если деформации малы, то, казалось бы, можно уйти от сложной модели материала и обойтись заданием «модуля упругости» и коэффициента Пуассона. Однако если деформации становятся велики, то тут задача усложняется. Для задания корректного отклика модели на действие нагрузок, необходимы экспериментальные данные. Для наиболее точного моделирования поведения изделия обычно рекомендуется проводить максимальное доступное количество различных испытаний, однако, как правило, такой возможности нет. В этом случае рекомендуется использовать результаты испытаний, полученных при двух (по меньшей мере) различных условиях нагружения из числа:
- Одноосное растяжение
- Одноосное сжатие
- Двухосное растяжение
- Плоский сдвиг
- Простой сдвиг
- Трёхосное сжатие
Естественно, что материал образцов испытаний должен по своей технологической обработке быть максимально близок к материалу реального изделия.
Выбор закона поведения материала

Подбор правильного (в вашем случае) закона поведения материала вместе с удачной подгонкой кривых деформирования является важным этапом решения всей задачи. В ANSYS доступно множество законов поведения гиперупругих материалов и пен. Среди них Neo-Hookean, Mooney-Rivlin, Ogden, Yeoh, Blatz-Ko, Arruda-Boyce. Несмотря такое на разнообразие, важно помнить, что каждый из законов имеет свои границы применимости. Так, например, модель Neo-Hookean даёт корректные результаты только до деформаций 20-30% для растяжения и сжатия, в то время как двухпараметрическая модель Mooney-Rivlin – до 100% деформации для растяжения и только 30% для сжатия.
Верификация результатов
После того как вы провели испытания и задали одну из моделей поведения гиперупругого материала, не стоит бросать все свои дела и радостно нажимать на кнопку SOLVE своей сложной и объёмной задачи.
Хорошей практикой является проверка корректности заданной модели материала при помощи «виртуальных испытаний». Под «виртуальными испытаниями» здесь имеется в виду сравнение кривых деформирования материала реальных испытаний с кривыми деформирования, полученными на конечно-элементной модели тех же испытаний (притом, что характеристики материала были получены из этих же реальных испытаний). Здесь стоит помнить, что ANSYS даёт реальную зависимость напряжений от деформаций, и она отличается от инженерной.

Если в пределах допустимой погрешности кривые совпадают, то можно быть относительно спокойным за результаты расчёта. В том же случае, если кривые не совпадают, необходимо менять модель материала и, возможно, подгонять характеристики виртуальной модели до соответствия реальным испытаниям.
Теперь, когда вы подобрали модель материала, которая должна давать корректные результаты при интересующих вас условиях нагружения, можно приступать к решению. Однако получить желанное решение может быть не просто, и вы столкнётесь с рядом проблем несходимости. Большинство этих проблем, а также способы их решения описаны здесь. Однако есть ещё одна проблема, связанная с несжимаемостью, в этой статье не описанная.
Читайте также: Шины это наборы проводников
В случае, когда коэффициент Пуассона близок к 0,5, возникает специфическая проблема, мешающая сходимости решения. На русский язык её название устоявшегося перевода не имеет, поэтому, как и во всём прогрессивном мире, будем использовать термин «volumetric locking».
В решении этой проблемы улучшение качества сетки или смена типа интегрирования бессильны, тут нужны специальные элементные формулировки, но это уже совсем другая история.
Обзор методов моделирования болтовых соединений в ANSYS
Задача моделирования болтов в трехмерных конечно-элементных расчетах всегда была довольно сложной и интересной, поскольку подробное представление особенностей геометрии болта обычно приводит к большой размерности моделей и высоким вычислительным затратам. Такое положение вещей вызывает у любого расчетчика естественное желание найти наиболее эффективный для своей задачи метод моделирования болтов.
Подход к моделированию болтов обычно характеризуется следующими аспектами:
- Подготовка геометрии: топология и подробность геометрии болта и связанных с ним компонентов;
- Сетка: Для наилучшего представления требуется получить минимальное число степеней свободы, а также сделать выбор между гекса и тетра элементами;
- Контакт: Должна корректно осуществляться передача нагрузок/напряжений через контактные поверхности;
- Определение нагрузки:
– Шаг 1: Приложение нагрузки затяжки болта (Bolt Pretension Load)
– Шаг 2: Фиксация болта в нагруженном состоянии (Lock)
– Шаг 3: Приложение нагрузки к конструкции;
Способ определения геометрии болта оказывает существенное влияние на оптимальную методику моделирования, включая создание сетки, контакта и задания общих настроек расчета (Analysis Settings). В этом посте собрано восемь методов моделирования болтов в ANSYS. Для демонстрации этих методик используется простая модель соединения с восемью болтами.

Рисунок 1. Модель болтового соединения
Модель болта №1:
- Болт со всеми особенностями, с резьбой, моделируется целиком как 3D тело.
- Эта модель при достаточно подробной сетке дает хорошее геометрическое представление жесткости.
- Ввиду сложности геометрии строится как правило тетра сетка, причем элементы в резьбе все равно могут быть весьма плохого качества – за этим нужно внимательно следить. Также для получения хороших результатов сетка должна быть достаточно мелкой.
- Тип контакта между болтом и фланцем, гайкой и болтом определяется любым кроме bonded.

Рисунок 2. Модель с геометрическим представлением резьбы
Модель болта №2:
- В этой модели геометрическое представление резьбы нужно удалить и со стороны болта, и со стороны гайки.
- Удаление резьбы повлияет на жесткость болта.
- Используется тетра сетка, по аналогии с моделью болта №1, но при этом можно обойтись меньшим количеством элементов в резьбе.
- Тип контакта между болтом и фланцем, гайкой и болтом определяется любым кроме bonded.

Рисунок 3. 3D Solid модель болта без резьбы
Модель болта №3:
- Геометрическое представление резьбы не потребуется, как и в модели №2.
- В ANSYS начиная с версии 15.0 существует методика виртуальной резьбы boltthreadcontact technique для создания контакта между болтом и гайкой. Данный метод определяется на основе всех геометрических характеристик резьбы. Вычислительные затраты на получение аналогичных напряжений в области резьбы снижаются в 10 раз по сравнению с моделью №1.
- Используется тетра сетка, по аналогии с моделью №1. Для увеличения количества элементов в области резьбы удобно использовать contact sizing.
- Тип контактов между болтом и фланцем, гайкой и болтом определяется как bonded с несимметричным поведением (asymmetric behavior).

Рисунок 4. Модель с виртуальной резьбой

Рисунок 5. Настройки виртуальной резьбы
Модель болта №4:
- В этой модели тела болта и гайки упрощены и разрезаны, для удобства протягивания сетки (тела теперь являются «протягиваемыми» или sweepable bodies).
- Далее нужно добавить ряд настроек и можно получить неплохую гекса сетку.
- В модели контакта между болтом и гайкой используется методика виртуальной резьбы, аналогично модели №3 (рекомендуется 4 элемента на 1 виток резьбы).
- Тип контактов между болтом и фланцем, гайкой и болтом определяется как bonded с несимметричным поведением (asymmetric behavior).

Рисунок 6. Упрощенная 3D Solid модель болта с гекса сеткой
Модель болта №5:
- Геометрия та же, что и в модели №4.
- Контакт с виртуальной резьбой между болтом и гайкой заменяется на цилиндрический шарнир (cylindrical joint).
- С помощью APDL команд тип шарнира меняется на crew joint.
- Тип контактов между болтом и фланцем, гайкой и болтом определяется как bonded с несимметричным поведением (asymmetric behavior).
Читайте также: Шины r20 летние в нижнем новгороде

Рисунок 7. 3D Solid модель с использованием crew joint

Рисунок 8. Код APDL для изменения типа joint’а
Модель болта №6:
- Геометрия болта упрощается до одного балочного тела.
- Для моделирования пятен контакта на верхней и нижней поверхностях фланца отпечатываются цилиндрические поверхности (рисунок 9).
- Для связи цилиндрических областей контакта с концами балочного тела используется Bonded контакт (MPC).
- Балочное тело разбивается балочными (beam) элементами, соответственно, размерность модели существенно снижается.
- Однако, подробности напряженно деформированного состояния в теле болта таким образом вычислить не получится.

Рисунок 9. Балочная модель с учетом пятна контакта

Рисунок 10. Настройки MPC контакта
Модель болта №7:
- Геометрия болта упрощается до балочного тела, как и в модели №6.
- Цилиндрические поверхности не отпечатываются.
- Для определения контакта между концами балочного тела и цилиндрических ребер болтовых отверстий используется Bonded контакт (MPC). Радиус Pinball radius должен быть достаточно большим, чтобы охватывать цилиндрические ребра.
- Однако, подробности напряженно деформированного состояния в теле болта таким образом вычислить не получится.

Рисунок 11. Балочная модель без учета пятна контакта
Модель болта № 8:
- Для моделирования болтового соединения используется связь Body-Body> beam connecton. Никакой геометрии болта или гайки не потребуется.
- Между mobile/reference геометриями создается единственный балочный элемент beam 188.
- Для создания балочного соединения нужно прикрепить (Scope) объект к ребру или поверхности болтовых отверстий на фланце.
- В данной методике нельзя использовать затяжку болта (bolt-pretension) напрямую. Для задания изначального напряженно деформированного состояния от усилий затяжки потребуются команды APDL.

Рисунок 12. Моделирование болта опцией Beam Connection

Рисунок 13. APDL код для моделирования затяжки болта
Затяжка болта (Bolt Pretension Load)
В рассматриваемой модели конструкции будут присутствовать все восемь вариантов реализации болтового соединения одновременно – по одному на каждый болт. Нагрузка bolt pretension load (500Н) будет приложена ко всем болтам за исключением модели № 8 (в этой модели будет использован соответствующий код APDL). Для приложения нагрузки нужно выбрать поверхность (трехмерный болт) или ребро (балочное тело) болта.

Рисунок 14. Нагрузка Bolt Pretension
Потребуются два шага нагружения: на первом шаге прикладывается нагрузка затяжки болта, на втором шаге болт фиксируется в затянутом положении.

Рисунок 15. Задание нагрузки Bolt Pretension
Сравнение результатов:
Смещение верхнего фланца является адекватным независимо от выбранного метода моделирования болта.

Рисунок 16. Смещение фланца
Полное перемещение Total deformation также осесимметрично независимо от выбранной модели.

Рисунок 17. Полное перемещение фланца
Первые пять моделей (трехмерная геометрия болта) показали примерно одинаковое распределение напряжений вдоль болта, с максимальным значением около 25 МПа. Уровень напряжений, посчитанный вручную составил 25.6 МПа (500Н/19.537мм 2 ). Таким образом, ошибка в модели менее 3%.

Рисунок 18. Напряжения в болтах, выполненных Solid моделями
Для болтов, смоделированных балочными телами, напряжение составило 25.5 МПа. (напряжения были получены с помощью инструмента “Beam Tool”)

Рисунок 19. Напряжения в болтах, выполненных балочными моделями
Что касается балочного соединения, то для получения напряжений были использованы команды APDL. Величина составила 25.4 МПа.

Рисунок 20. Получение напряжения в болте, смоделированном опцией Beam Connection
В заключение надо сказать, что расчетчику стоит хорошо подумать перед принятием решения о выборе метода моделирования болтового соединения. Что же касается общих рекомендаций, то, если предметом интереса является поведение всей сборки, а не уровень напряжения в болтовом соединении, то балочные тела/соединения будут наилучшим выбором, поскольку существенно снизят размерность модели.
Если в результате расчета необходимо получить понимание состояния контакта между болтом и фланцем, а также напряжения в болтовом соединении, то рекомендуется твердотельное моделирование, однако не забудьте подготовить геометрию модели и поработать над созданием достаточно мелкой сетки. Метод виртуальной резьбы поможет существенно снизить размерность модели и, соответственно, рекомендуется при работе с большими сборками.
Какие из описанных моделей вы использовали? Вы не нашли свой любимый метод среди описанных? Обязательно поделитесь с нами опытом в комментариях, а также не стесняйтесь задавать вопросы там же или на нашем форуме.
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле