

Монитор COM-порта служит для работы с портом RS-232 компьютера. Кнопка служит для обновления списка активных COM-портов.
Область управления портом
- Выпадающий список служит для выбора номера порта из списка активных COM-портов;
- Выпадающий список служит для установки скорости работы с выбранным COM-портом;
- Кнопка служит для соединения с выбранным COM-портом;
- Кнопка служит для отключения от COM-порта;
- Кнопка служит для очистки области отображения принятой информации.
Область отображения принятой информации
В поле «ASCII» информация, принятая с COM-порта, отображается в виде кодировки ASCII. В полях «DEC», «HEX», «BIN» принятая информация отображается соответственно в десятичном, шестнадцатеричном и двоичном форматах.
Область передачи информации

В поля ввода информация, предназначенная для передачи в COM-порт, вводится в соответствующем формате. Кнопки под полями ввода служат для отправки данных из соответствующего поля.
Запись кодов кнопок ИК-пульта
Читайте также: Ямаха фазер 250 давление в шинах
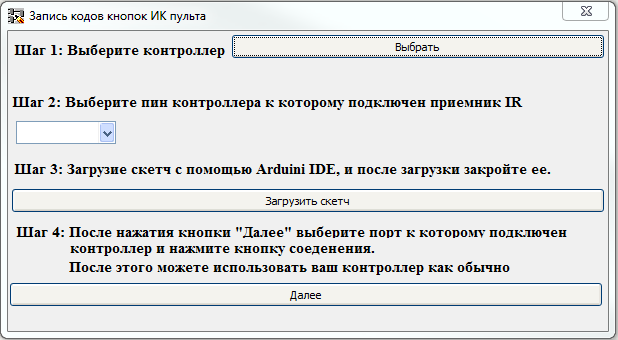
Работа с инструментом «Запись кодов кнопок ИК-пульта» состоит из четырёх шагов:
- Шаг 1 – выбор контроллера (платы Arduino);
- Шаг 2 – выбор вывода платы, к которому подключен ИК-приёмник;
- Шаг 3 – загрузка скетча в контроллер. После загрузки Arduino IDE необходимо закрыть;
- Шаг 4 – чтение кодов кнопок ИК-пульта
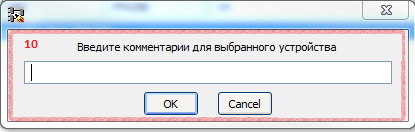
Необходимо выбрать COM-порт, к которому подключена плата, и нажать кнопку соединения ( ) ( 1 ). После этого надо направить ИК-пульт на приемник и нажать кнопку пульта, код которой необходимо прочитать. В поле «Производитель» ( 3 ) появится название производителя пульта. В поле «Код» ( 4 ) появится код нажатой кнопки. В поле «Пульт» ( 2 ) можно записать название пульта для облегчения дальнейшего выбора необходимой кнопки в проекте, а в поле «Описание»( 5 ) можно ввести название кнопки. Рекомендуется нажать кнопку пульта несколько раз и проконтролировать отсутствие изменений в поле «Код» и после этого нажать кнопку «Добавить» ( 6 ). Запись о коде появится в поле отображения ( 7 ). В любой момент описание кнопки можно изменить в диалоговом окне ( 10 ), вызываемым двойным щелчком по нужной записи.
После появления первой записи в поле отображения ( 7 ) в выпадающем списке «Пульт» ( 2 ) появится название этого пульта. Если вы ранее уже записывали данные с этого пульта, то можно загрузить ранее сохранённые коды кнопок из файла с помощью кнопки «Загрузить» ( 8 ). После окончания сканирования кнопок необходимо отключиться от порта с помощью кнопки и сохранить полученные данные, нажав на кнопку «Сохранить» ( 9 ). Для сохранения всех данных полученных с помощью любого из инструментов можно использовать один и тот же файл.
Шины данных
Сканирование шины 1-Wire
Работа с инструментом «Сканирование шины 1-Wire» состоит из четырех шагов:
- Шаг 1 – выбор контроллера (платы Arduino)
- Шаг 2 – выбор вывода платы, к которому подключена шина 1-Wire
- Шаг 3 – загрузка скетча в контроллер. После загрузки Arduino IDE необходимо закрыть
Необходимо выбрать COM-порт, к которому подключена плата, и нажать кнопку соединения ( ) ( 1 ). Через некоторое время в поле вывода информации появятся записи о подключенном к шине оборудовании. В поле «Адрес»( 2 ) будет указан адрес устройства. В поле «Тип» ( 3 ) – тип устройства, а в поле «Текущее значение»( 4 ) – значение параметра, передаваемое устройством. С помощью двойного клика по необходимому устройству можно вызвать окно заполнения поля «Комментарий»( 5 ).
После окончания сканирования шины необходимо отключиться от COM-порта с помощью кнопки ( 1 ) и сохранить полученные данные, нажав на кнопку «Сохранить» ( 6 ). Для сохранения всех данных, полученных с помощью любого из инструментов, можно использовать один и тот же файл.
Сканирование шины I 2 C
Работа с инструментом «Сканирование шины I 2 C» состоит из четырёх шагов:
- Шаг 1 – выбор контроллера (платы Arduino)
- Шаг 2 – После выбора контроллера будет показана подсказка о подключении устройства к контроллеру. Необходимо проверить правильность подключения устройства.
- Шаг 3 – загрузка скетча в контроллер. После загрузки Arduino IDE необходимо закрыть
Читайте также: Клей для клейки шин
Необходимо выбрать COM-порт, к которому подключена плата, и нажать кнопку соединения ( ) ( 1 ). Через некоторое время в поле вывода информации ( 2 ) появятся адреса устройств, подключенных к шине I 2 C. С помощью двойного щелчка по необходимому устройству можно вызвать окно заполнения комментария к устройству.
После окончания сканирования шины I 2 C, необходимо отключиться от порта с помощью кнопки и сохранить полученные данные, нажав на кнопку «Сохранить» ( 3 ). Для сохранения всех данных, полученных с помощью любого из инструментов, можно использовать один и тот же файл.
Поддержка протоколов Modbus, SPI, One Wire, I2C и др.

Библиотека SPI
Краткое введение в интерфейс SPI (Serial Peripheral Interface)
Последовательный периферийный интерфейс (SPI) — это синхронный протокол последовательной передачи данных, используемый для связи микроконтроллера с одним или несколькими периферийными устройствами. Интерфейс SPI отличается относительно высокой скоростью и предназначен для связи близко расположенных устройств. Он также может использоваться для взаимодействия двух микроконтроллеров.
Согласно протоколу SPI, одно из взаимодействующих устройств (обычно микроконтроллер) всегда является ведущим и контролирует ведомые периферийные устройства. Как правило, все взаимодействющие устройства объединены тремя общими линиями:
- MISO (Master In Slave Out) — линия для передачи данных от ведомого устройства (Slave) к ведущему (Master),
- MOSI (Master Out Slave In) — линия для передачи данных от ведущего устройства (Master) к ведомым (Slave),
- SCK (Serial Clock) — тактовые импульсы, генерируемые ведущим устройством (Master) для синхронизации процесса передачи данных.
Помимо перечисленных, на каждое устройство отводится отдельная линия:
- SS (Slave Select) — вывод, присутствующий на каждом ведомом устройстве. Он предназначен для активизации Мастером того или иного периферийного устройства.
Периферийное устройство (Slave) взаимодействует с ведущим (Master) тогда, когда на выводе SS присутствует низкий уровень сигнала. В противном случае данные от Master-устройства будут игнорироваться. Такая архитектура позволяет взаимодействовать с несколькими SPI-устройствами, подключенными к одной и той же шине: MISO, MOSI и SCK.
Перед тем, как отправлять данные новому SPI-устройству, необходимо выяснить о нем несколько основных моментов:
- Сдвиг данных должен осуществляться, начиная со старшего бита (MSB) или с младшего бита (LSB)? Порядок следования данных контролируется функцией SPI.setBitOrder().
- При отсутствии тактовых импульсов линия SCK должна находиться в высоком или низком уровне? Считывание данных происходит по фронту или по спаду тактового импульса? Эти режимы работы контролируются функцией SPI.setDataMode().
- Какова должна быть скорость передачи данных по SPI? Этот параметр контролируется функцией SPI.setClockDivider().
Поскольку стандарт SPI является открытым, его реализация в разных устройствах может немного отличаться. Поэтому при написании программ, особое внимание необходимо уделять даташиту того или иного устройства.
Грубо говоря, существует четыре режима передачи данных, отличающиеся условием сдвига данных (по фронту или по спаду синхро-импульсов — так называемая фаза), а также уровнем сигнала, в котором должна находится линия SCK при отсутствии синхро-импульсов (полярность). Различные комбинации фазы и полярности, формирующие четыре режима передачи данных, сведены в таблицу:
| Режим | Полярность (CPOL) | Фаза (CPHA) |
| SPI_MODE0 | 0 | 0 |
| SPI_MODE1 | 0 | 1 |
| SPI_MODE2 | 1 | 0 |
| SPI_MODE3 | 1 | 1 |
Для изменения режима передачи данных служит функция SPI.setDataMode().
Каждое SPI-устройство налагает определенные ограничения на максимальную скорость SPI-шины. Для корректной работы периферийных устройств в библиотеке предусмотрена функция SPI.setClockDivider(), позволяющая изменять тактовую частоту шины (по умолчанию 4 МГц).
После правильной настройки всех параметров SPI, останется только выяснить, какие регистры периферийного устройства отвечают за те или иные его функции. Как правило, это описано в даташите устройства.
Для получения дополнительной информации об интерфейсе SPI, см. страницу Википедии.
Соединения
Ниже в таблице приведены номера выводов, использующиеся шиной SPI в тех или иных моделях Ардуино:
| Плата Arduino | MOSI | MISO | SCK | SS (slave) | SS (master) |
| Uno или Duemilanove | 11 или ICSP-4 | 12 или ICSP-1 | 13 или ICSP-3 | 10 | — |
| Mega1280 или Mega2560 | 51 или ICSP-4 | 50 или ICSP-1 | 52 или ICSP-3 | 53 | — |
| Leonardo | ICSP-4 | ICSP-1 | ICSP-3 | — | — |
| Due | ICSP-4 | ICSP-1 | ICSP-3 | — | 4, 10, 52 |
Обратите внимание, что на всех платах выводы MISO, MOSI и SCK соединены с одними и теми же контактами разъема ICSP. Такое расположение может быть удобно при создании универсальных плат расширения, работающих на всех моделях Ардуино.

Особенности работы вывода SS в Ардуино на базе AVR
У всех моделей Ардуино на основе микроконтроллеров AVR есть вывод SS, который используется в режиме работы Slave (например, при управлении Ардуино внешним ведущим устройством). Однако, в библиотеке реализован только режим работы Master, поэтому в этом режиме вывод SS должен быть сконфигурирован как выход. В противном случае SPI может аппаратно переключиться в режим Slave, что приведет к неработоспособности функций библиотеки.
Для управления выводом SS периферийных устройств можно использовать любой из доступных выводов. Например, на плате расширения Arduino Ethernet для взаимодействия со встроенной SD-картой и контроллером Ethernet по SPI используются выводы 4 и 10 соответственно.
Расширенные возможности SPI на Arduino Due
Существуют некоторые особенности работы с интерфейсом SPI на платах Arduino Due. Помимо основных функций и методов, применимых ко всем платам Ардуино, в библиотеке SPI предусмотрено несколько дополнительных методов. Эти методы реализовывают аппаратные возможности микроконтроллеров SAM3X и предоставляют разработчику расширенные возможности:
- автоматический управление процессом выбора ведомого устройства;
- автоматическое управление конфигурациями интерфейса SPI для различных устройств (тактовая частота, режим передачи данных и т.д.). Благодаря этому каждое из ведомых устройств может иметь собственный набор настроек, автоматически применяемых в начале передачи.
В Arduino Due есть три отдельных вывода (4, 10 и 52) для управления линиями SS периферийных устройств.
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле