Неудивительно, что общей особенностью электронных систем является необходимость обмена информацией между двумя или тремя или десятью отдельными компонентами. Инженеры разработали ряд стандартных протоколов, которые помогают различным микросхемам успешно общаться, что становится очевидным, когда вы сталкиваетесь с потоком сокращений в разделе «Связь» в списке характеристик микроконтроллера или сигнального процессора: UART, USART, SPI, I2C, CAN. Каждый протокол имеет свои плюсы и минусы, и важно немного знать о каждом из них, чтобы вы могли принимать обоснованные решения при выборе компонентов или интерфейсов.
Эта статья посвящена шине I2C, которая обычно используется для связи между отдельными интегральными микросхемами, расположенными на одной печатной плате. Два других распространенных протокола, которые также входят в эту основную категорию – это UART (универсальный асинхронный приемник/передатчик) и SPI (последовательный периферийный интерфейс). Вам необходимо знать основные характеристики I2C, прежде чем вы сможете полностью понять сравнение этих трех интерфейсов, поэтому обсудим эту тему в конце статьи.
- Много названий, а шина одна
- Выглядит, как попытка обсудить что-то важное в комнате, полной людей.
- Обзор
- I2C против UART и SPI
- Заключение
- I²C — Inter-Integrated Circuit, краткое руководсто
- Общие сведения:
- Подключение:
- I²C на Arduino
- I²C на Raspberry Pi
- Подробнее о шине I²C:
- Резисторы, ёмкость и длина линий шины
- Сигналы и специальные биты шины
- Обмен данными
- Скорость
Много названий, а шина одна
Нет сомнений в том, что протокол I2C страдает серьезной терминологической проблемой. Фактическое название – шина Inter–Integrated Circuit. Самая простая и, вероятно, наименее распространенная аббревиатура – IIC. Возможно, эту аббревиатуру недолюбливали из-за того, что две заглавные буквы I выглядят как две единицы, или как две строчных буквы l , или как римская цифра II , или как символ параллельных прямых. В любом случае аббревиатура I 2 C (произносится как «I в квадрате C») приобрела популярность, несмотря на сомнительную логику обращения с обычной буквой, как если бы она была переменной, подверженной возведению в степень. Третий вариант – I2C («I два C»), который позволяет избежать неудобств форматирования верхнего индекса, а также несколько легче в произношении, чем «I в квадрате C»
Дополнительная путаница вносится, когда вы замечаете, что SMB или SMBus явно используется в качестве еще одного способа обращения к шине I2C. Фактически эти сокращения относятся к шине управления системой SMB (System Management Bus), которая отличается, хотя и почти идентична, от шины I2C. Оригинальный протокол I2C был разработан компанией Phillips Semiconductor, а спустя годы Intel определил протокол SMBus как расширение I2C. Эти две шины в значительной степени взаимозаменяемы; если вас интересуют незначительные отличия между ними, то смотрите страницу 57 спецификации шины управления системой SMB.
Выглядит, как попытка обсудить что-то важное в комнате, полной людей.
Чтобы оценить ловкие технические приемы, которые делают I2C настолько эффективной, вам нужно подумать о трудностях достижения надежной, но универсальной связи между несколькими независимыми компонентами. Ситуация достаточно проста, если у вас есть одна микросхема, которая всегда является ведущей (master), и одна микросхема, которая всегда является ведомой (slave). Но что, если у вас есть несколько ведомых? Что если ведомые не знают, кто ведущий? Что, если у вас есть несколько ведущих? Что произойдет, если ведущий запросит данные у ведомого устройства, которое по какой-то причине перестало функционировать? Или что, если ведомый перестал функционировать в середине передачи? Что делать, если ведущий утверждает, что шина осуществляет передачу, а затем он выйдет из строя, прежде чем освободить шину?
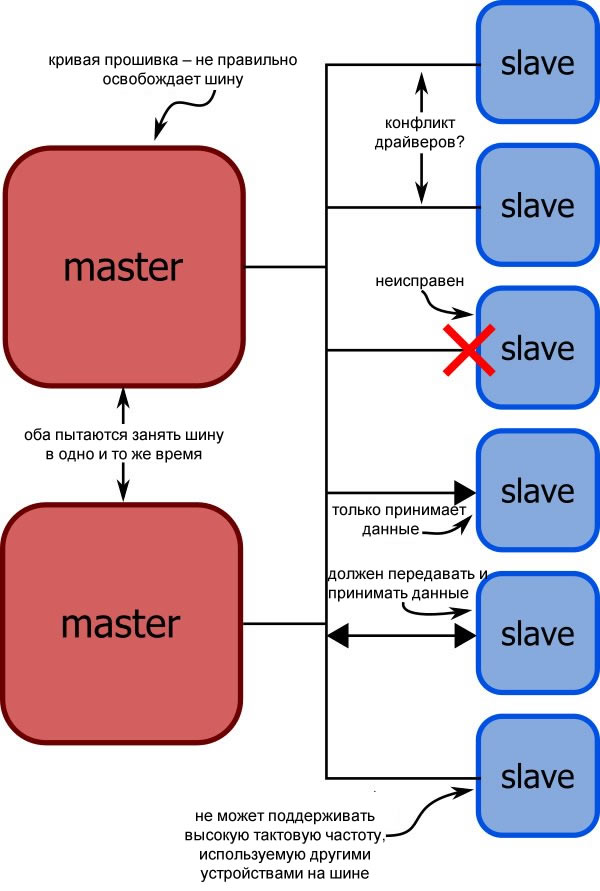
Возможные проблемы на шине
Дело в том, что в системе связи такого типа есть много вещей, которые могут пойти не так. Вы должны помнить об этом, когда будете изучать I2C, потому что в противном случае этот протокол будет казаться невыносимо сложным и перегруженным. Дело в том, что эта дополнительная сложность – это то, что позволяет I2C обеспечивать гибкую, расширяемую, надежную и низкоуровневую последовательную связь.
Обзор
Прежде чем вдаваться в детали, давайте рассмотрим ключевые характеристики I2C:
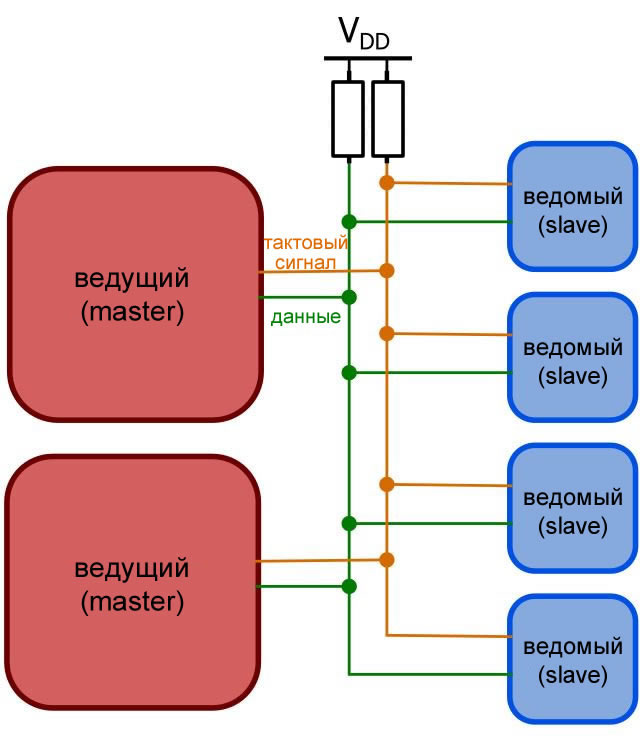
Шина I2C
- Используется только два сигнала (тактовая синхронизация и данные) независимо от токо, сколько устройство подключено к шине.
- Оба сигнала подтягиваются к положительному напряжению питания через резисторы, соответствующих номиналов.
- Каждое устройство взаимодействует с сигналами данных и тактовой синхронизации через драйверы вывода с открытым стоком (или с открытым коллектором).
- Каждое ведомое устройство идентифицируется с помощью 7-битного адреса; устройство мастер должно знать эти адреса, чтобы общаться с конкретным ведомым устройством
- Все передачи инициируются и прекращаются мастером; масте может передавать данные одному или нескольким ведомым устройствам или запрашивать данные из ведомого устройства.
- Метки «ведущий/master» и «ведомый/slave» по своей сути непостоянны: любое устройство может функционировать и как ведущее, и как ведомое устройство, если оно содержит необходимое аппаратное и/или программное обеспечение. На практике, однако, встраиваемые системы часто используют архитектуру, в которой одни мастер отправляет команды или собирает данные с нескольких ведомых устройств.
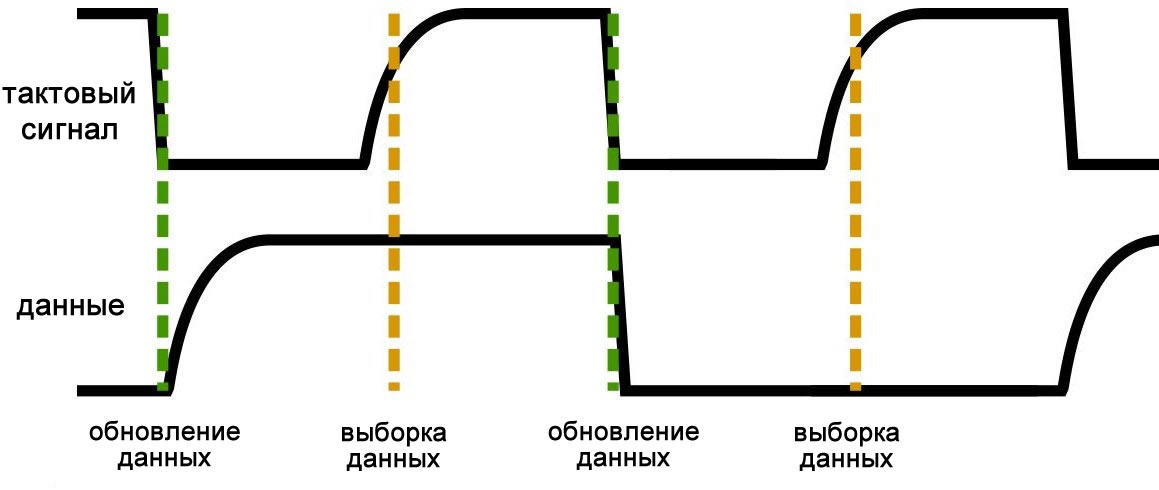
- Сигнал данных обновляется по заднему фронту тактового сигнала, а его выборка происходит по переднему фронту следующим образом: Временная диаграмма сигналов шины I2C
- Данные передаются в однобайтовых секциях, причем каждый байт сопровождается однобитным сигналом подтверждения, называемым битом ACK/NACK (подтверждение или неподтверждение).
Читайте также: Шина медная 20х3 техэнерго
I2C против UART и SPI
Преимущества I2C можно резюмировать следующим образом:
- требует малое количество выводов/сигналов даже с большим количеством устройств на шине;
- адаптируется к потребностям разных ведомых устройств;
- легко поддерживает несколько ведущих устройств;
- включает в себя функционал ACK/NACK для улучшения обработки ошибок.
А вот некоторые недостатки:
- увеличивает сложность программного или низкоуровневого аппаратного обеспечения;
- навязывает накладные расходы протокола, что снижает пропускную способность;
- требует подтягивающих резисторов, которые
- ограничивают тактовую частоту;
- занимают полезное место на печатной плате в системах, ограниченных по размеру;
- увеличивают рассеиваемую мощность.
С этих точек зрения видно, что I2C особенно подходит, когда у вас сложная, разнообразная или обширная сеть связанных устройств. Интерфейсы UART обычно используются для соединений «точка-точка», потому что не имеют стандартного способа адресации различных устройств и совместного использования линий связи. SPI отлично работает, когда у вас есть одно ведущее и несколько ведомых устройств, но для каждого ведомого устройства требуется отдельный сигнал выбора ведомого, что приводит к большому количеству линий связи и к трудностям разводки печатной платы, когда на шине находится много устройств. И SPI неудобен, когда вам нужно поддерживать несколько ведущих устройств.
Возможно, вам придется сознательно избегать I2C, если пропускная способность является приоритетом; SPI поддерживает более высокие частоты тактового сигнала и минимизирует накладные расходы. Кроме того, разработка низкоуровнего аппаратного обеспечения для SPI (или UART) намного проще, поэтому, если вы работаете с FPGA и разрабатываете свой последовательный интерфейс с нуля, I2C, вероятно, стоит выбирать последним.
Заключение
Мы рассмотрели основные характеристики I2C, и теперь мы достаточно хорошо знаем о преимуществах и недостатках этого протокола, чтобы принять обоснованное решение о том, какую последовательную шину выбрать для какого-то конкретного приложения. В будущих статьях мы рассмотрим протокол и как его реализовать более подробно.
I²C — Inter-Integrated Circuit, краткое руководсто
Общие сведения:
I²C (и-квадрат-це, ай-ту-си, ай-сквэрд-си), Inter-Integrated Circuit — последовательная шина обмена данными между интегральными схемами. Изобретена и в начале 80-х компанией Philips Semiconductor (теперь NXP), передача данных осуществляется по двум проводам в обе стороны. Ведущий и ведомый могут выполнять как роль приёмника, так и передатчика. Для возможности соединения более двух устройств используются адресация. Опрашивать адреса шины может только ведущий. Адрес последовательно выводится на линию SDA сразу после сигнала Start. В этой статье речь пойдёт только о 7-ми битной адресации, так же не будет затронута тема нескольких ведущих. На каждом устройстве, поддерживающем I²C обычно обозначены два вывода: SDA и SCL. SDA (serial data) — означает последовательные данные, SCL (serial clock) — последовательное тактирование. Эти выводы являются выводами открытого коллектора или открытого стока, это означает что ведущий и ведомый могут только притягивать электрический потенциал к земле, поэтому на каждой линии должны быть подтягивающие резисторы. Сопротивление резисторов рассчитывается в зависимости от паразитной ёмкости линии.
Подключение:
Шина поддерживает подключение до 112 устройств (при 7-ми битной адресации) по двум проводам (плюс GND и Vcc), может иметь несколько ведущих и ведомых. При использовании нескольких ведущих, каждый из них должен поддерживать этот режим и уметь определять состояние занятой шины.
Читайте также: Хост контроллер шины ieee 1394 что это такое
I²C на Arduino
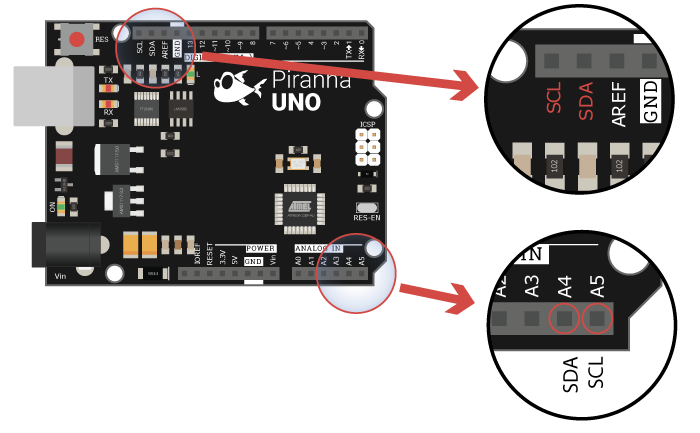
Arduino UNO R3/Piranha UNO
На Arduino UNO R3/Piranha UNO шина I2C находится на выводах A4, A5. Также в эти выводы продублированы на колодке с цифровыми выводами рядом с кнопкой Reset.

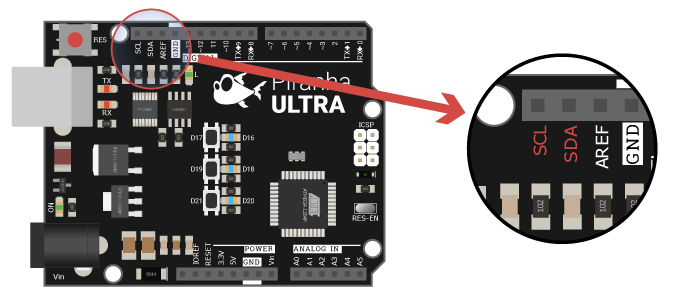
Piranha ULTRA
На Piranha ULTRA шина I²C не занимает аналоговые выводы A4, A5 и находится на цифровой колодке рядом с кнопкой Reset, выводы обозначены SDA и SCL
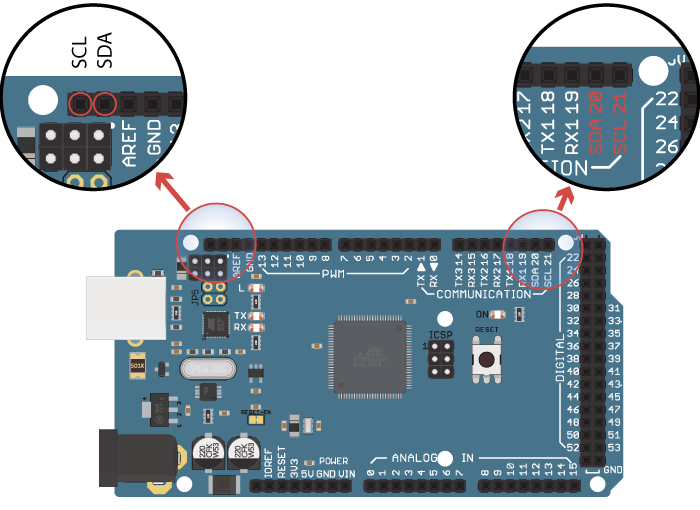
Arduino MEGA R3
На Arduino MEGA R3 шина I²C находится на цифровой колодке на крайних выводах, близких к разъёму USB и на выводах 20, 21. Выводы объединены.
Примеры для Arduino
Работа с шиной с использованием встроенной библиотеки Wire Arduino IDE на примере Trema-модуля LED Матрицы 8×8 — i2c
В этом примере на матрицу выводится изображение стрелки. Стоит заметить, ко всем нашим модулям написаны библиотеки с высокоуровневым интерфейсом и вовсе не обязательно работать с матрицей на низком уровне. Подробнее о работе с библиотекой матрицы можно узнать по этой ссылке.
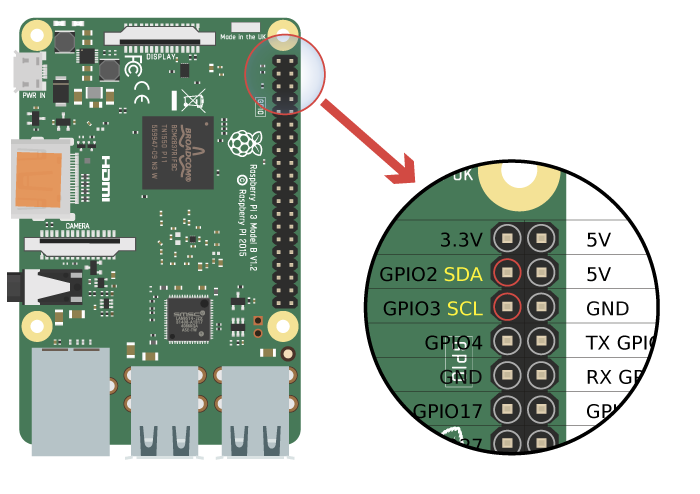
I²C на Raspberry Pi
На Raspberry Pi I²C выводы это 3-й и 5-й выводы колодки, GPIO2 и GPIO3 по номенклатуре BCM и выводы 8, 9 по номенклатуре WiringPi.
Примеры для Raspberry
Работа с шиной с использованием модуля smbus для Python на примере Trema-модуля Матрицы 8×8 — i2c. Для работы с шиной её необходимо включить в настройках Raspberry при помощи утилиты raspi-config . Ссылка на подробное описание как это сделать.
Так же как и в примере с Arduino, в этом примере на матрицу выводится изображение стрелки. Стоит заметить, к Trema-модулю LED Матрица 8×8 — i2c написана библиотека с высокоуровневым интерфейсом и вовсе не обязательно работать с матрицей на низком уровне. Подробнее о работе с библиотекой матрицы можно узнать по этой ссылке
Подробнее о шине I²C:
Резисторы, ёмкость и длина линий шины
В официальном описании от NXP ничего не сказано о максимальной длине шины, но не стоит этим злоупотреблять. Шина была придумана для обмена информации между интегральными схемами в пределах одной платы одного устройства. В расчёт бралась только паразитная ёмкость линии, которая сказывается на скорости нарастания фронта волны. От этой ёмкости зависит номинал подтягивающих резисторов. Можно подобрать резисторы так, чтобы фронт волны нарастал согласно спецификации и при 100-метровой длине проводов, но это не избавляет от помех, которые влечёт за собой несимметричная электрическая реализация. Опять же, при слишком маленьком сопротивлении качество сигнала улучшается, но при этом растёт ток который необходимо пропускать устройствам через выводы для притяжки линий.
При использовании шины на модулях не существует принятого стандарта установки подтягивающих резисторов на ведущем или ведомом. У Arduino подтягивающие резисторы отсутствуют и для работы с шиной нужен хотя бы один модуль с ними. У Raspberry Pi на плате установлены подтягивающие резисторы номиналом 1,7 килоОм и для неё нет необходимости в подтяжке на модулях.
Сигналы и специальные биты шины
В состоянии покоя линии шины находятся на верхнем потенциале (обычно 3,3 В или 5 В, но могут быть и другие напряжения). Бездействие устройства, по умолчанию, воспринимается как логическая 1. Для простоты понимания можно рассмотреть аналогию: Вообразим верхний потенциал как уровень воды, а нижний как дно. Представьте, что Вы на рыбалке — попловок в состоянии покоя остаётся на поверхности, когда клюёт — идёт ко дну. Так же и в здесь, при обмене данными линии прижимаются в нулевому потециалу. Далее рассмотрим поочереди сингалы и специальные биты.
Устанавливаемые только ведущим
- Start — сигнал начала обмена данными. Линия тактирования SCL отпущена (логическая 1), ведущий пижимает линию данных SDA (переход из логической 1 в логический 0). После этого обмен данными происходит побайтово. Первый байт — семь бит адреса ведомого и бит направления (запись или чтение). Последующие байты — данные. после этого сигнала шина считается занятой.
Краткое обозначание сигнала S — заглавная буква S латинского алфавита.
- Бит Read — Если ведущий желает получить данные, он устанавливает логическую 1 сразу после адреса, информируя ведомого о том, что данные будут считываться (управление линией данных передаётся ведомому).
Читайте также: Шины для мтз в смоленске
Краткое обозначание R — заглавная буква R латинского алфавита.
- Бит Write — Если ведущий желает записать данные, он устанавливает логический 0 сразу после адреса для информирования ведомого о том что данные будут записываться (управление линией данных остаётся у ведущего).
Краткое обозначение W̅ — заглавная буква W латинского алфавита с чертой сверху.
- Stop — сигнал окончания обмена данными. Ведущий прекращат тактирование, линия тактирования SCL отпущена (логическая 1), линия данных SDA переведена ведущим из логического 0 в логическую 1. После этого сигнала шина считается свободной.
Краткое обозначение P — заглавная буква P латинского алфавита.
- Restart — сигнал продолжения обмена данными (используется взамен сигналу Stop с последующим Start для продолжения опрашивания шины ). Используется в основном при наличии нескольких ведущих на шине, чтобы управление не перешло другому ведущему после сигнала Stop. Линия тактирования SCL отпущена ведущим, линия данных SDA переведена ведущим из логической 1 в логический 0.
Обозначается Sr — заглавная буква S и строчная буква r латинского алфавита.
Устанавливаемые ведущим и ведомым
Данные биты может устанавливат как ведущий, так и ведомый. В такой ситуации устанавливающее устройство или модуль (ведущий или ведомый) называют передатчиком, а считывающее устройство — приёмником.
- Бит ACK — (сокращ. англ. acknowledged — подтверждено) каждый девятый импульс тактирования передатчик (ведущий или ведомый) отпускает линию данных. Если линия была прижата приёмником (логический 0) — принятые данные верны, передача может быть продолжена или закончена.
Обозначается A — заглавная буква A латинского алфавита
- Бит NACK — (сокращ. англ. not acknowledged — не подтверждено) каждый девятый импульс тактирования передатчик (ведущий или ведомый) отпускает линию данных. Если линия была отпущена принимающим или принимающего нет на шине (логическая 1) — принятые данные неверны, произошла ошибка, передача не может быть продолжена. Обозначается A̅ — заглавная буква A латинского алфавита с чертой сверху.
Обмен данными
При обмене данными тактированием занимается только ведущий, а ведомый может удерживать линию тактирования только если не успевает за ведущим, так называемое растягивание тактирования (clock-stretching). Не все модули поддерживают удержание. Установка бита на линии данных может происходит в момент, когда линия тактирования прижата, а считывания, когда линия отпущена (подтянута к Vcc), но в большинстве случаев это происходит по фронту волны на линии тактирования.
Рассмотрим пример простого обмена данными:
Запись в регистры ведомого. Данные взяты из примеров, приведённых выше.
После сигнала Start и указания адреса ведущий записывает адрес регистра с которого будет производиться дальнейшая запись. Стоит заметить, что у ведомого есть внутренний счётчик и каждый последующий байт после подтверждения будет записан в следующий регистр. Таким образом байт со значением 0x00 будет записан в регистр 0x11, байт со значением 0x18 будет записан в регистр 0x12, байт со значением 0x3C будет записан в регистр 0x13 и т. д. В этом примере биты ACK устанавливает ведомый.
Вот так сигналы этого примера выглядят на осциллографе:
- Канал 1 — тактирование (SCL)
- Канал 3 — данные (SDA)
- Линия B1 — декодирование данных осциллографом
Чтение из регистров ведомого. Предположим, мы хотим прочитать байт из регистра 0x13.
После сигнала Start и указания адреса ведущий записывает адрес регистра, который необходимо прочитать. Далее следует сигнал Restart (или Stop, затем Start). Ведущий снова выводит адрес ведомого, но уже с битом Read (чтения). Ведомый устанавливает бит ACK и во время следующих 8-ти импульсов тактирования выводит данные на линию SDA. На девятом импульсе уже ведущий устанавливает бит ACK (или NACK, если данные не удалось прочитать) и завершает обмен сигналом Stop.
Скорость
Первоначальный стандарт I²C был реализован на скорости 100 кГц. С тех пор появились и другие реализации шины, но большинство устройств работают на этой скорости. Так же известны случаи когда скорость шины специально снижена, чтобы увеличить расстояние передачи и уменьшить чувствительность к помехам. Не все модули могут работать на сниженной скорости.
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле