

Схема решает проблему информационного обмена по кабелю, в котором не осталось свободных проводов. Амплитудно-манипулированный сигнал несущей частоты может передаваться по линиям низковольтного питания.
Иногда возникает необходимость организовать обмен данными, когда для выделенной линии связи в кабеле устройства уже не осталось неиспользованных проводников. Обычно такая задача решается с помощью высокочастотной несущей, модулированной данными и передаваемой по силовым линиям, в частности, по проводам домашней электропроводки.
Поиски в Интернете показали, что, несмотря на актуальность этой проблемы для многих разработчиков, простых, дешевых и надежных решений для низковольтных систем никто не предлагает. Ниже описан результат попытки восполнить это пробел. Имейте ввиду, что без обеспечения специальных схемотехнических мер безопасности эта схема для высоковольтных приложений непригодна.
Устройство, для которого потребуется лишь пригоршня дискретных компонентов и пара микросхем, может надежно передавать и принимать данные на скоростях до 32 кбит/с при частоте несущей 2.6 МГц. Вероятно, эту скорость можно многократно увеличить, если использовать более высокую несущую частоту и соответствующим образом изменить номиналы компонентов. Схема может работать на кабель емкостью до 10 нФ и имеет низкий уровень электромагнитных излучений. Она передает данные в стандартном последовательном асинхронном формате, совместимом с UART, но разработчикам ничто не мешает использовать манчестерское кодирование или иные протоколы.
Для простоты использована амплитудная манипуляция несущей и не предусмотрено никаких схемотехнических решений для подавления собственных шумов, кроме хорошего отношения сигнал/шум. При желании разработчики могут реализовать программное обнаружение и коррекцию ошибок.
| Рисунок 1. | Если в кабеле устройства не осталось свободных проводников, эта сравнительно простая схема позволит обмениваться данными по линии низковольтного питания. |
PIC микроконтроллер по набору периферии идеально подходит для нашей схемы. В частности, будет использован его модуль ШИМ или программируемый таймер для генерации прямоугольных импульсов сигнала несущей, а также быстродействующий компаратор с rail-to-rail входами (Рисунок 1). Разумеется, при наличии соответствующих периферийных устройств, можно использовать любой другой микроконтроллер.
В схеме показаны два трансивера. Приемопередатчик 1 (слева) является «удаленным» узлом, получающим питание от «базового» Приемопередатчика 2 (справа). Индуктивности L1 и L2 изолируют высокочастотную несущую от низкоимпедансной шины питания.
Нескольких узлов можно соединить в многоточечную шину, если каждый узел отелить от силовой линии развязывающей индуктивностью. Можно использовать небольшие индуктивности для поверхностного монтажа, но их рабочий ток должен с некоторым запасом обеспечивать питание нагрузки.
Передающая часть трансивера сделана на одноканальном трехстабильном драйвере шины U2 семейства TinyLogic (Fairchild). Выходы драйвера подключены к шине через элементы R1 и C1. Резистор R1 обеспечивает некоторую фильтрацию, снижающую уровень электромагнитного излучения, создаваемого крутыми фронтами прямоугольной несущей.
Точка подключения приемника образована элементами C2, D2 и D3, за которыми следуют два пиковых детектора. Первый детектор, с постоянной времени, равной примерно одной третьей длительности информационного бита, демодулирует несущую для восстановления синхронизации данных. Второй, с постоянной времени приблизительно в 50 раз превышающей длительность бита данных, адаптивно восстанавливает уровень несущей. Резисторы R3 и R5 делят этот уровень примерно до двух третьих от амплитуды несущей.
Выходы обоих детекторов подключены к входам внутреннего аналогового компаратора микроконтроллера, окончательно формирующего прямоугольные сигналы данных, которые через внешнюю цепь поступают затем на UART. Резистор R4 слегка смещает вверх неинвертирующий вход компаратора, чтобы в отсутствие обмена обеспечить предсказуемый уровень «лог. 1».
Необходимо отметить, что вход и выход трансивера всегда соединены вместе, поэтому надо позаботиться о том, чтобы программа игнорировала сигналы, принимаемые от собственного передатчика.
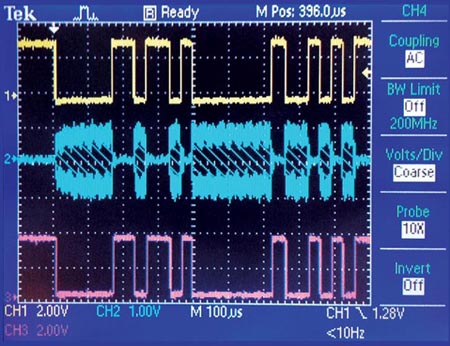 | |
| Рисунок 2. | Исходные данные (желтый) модулируют несущую, передаются по линии питания (синий) и точно восстанавливаются на выходе компаратора (розовый). |
На Рисунке 2 желтой осциллограммой представлены исходные цифровые данные, посылаемые удаленным трансивером в передающий порт UART. Синим цветом показан результат модуляции несущей, наблюдаемый на шине питания. Розовым цветом обозначен демодулированный и восстановленный сигнал, поступающий с выхода компаратора на вход RXD UART.
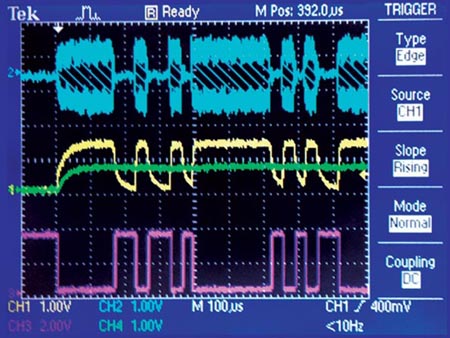 | |
| Рисунок 3. | Осциллограмма, иллюстрирующая процесс демодуляции и восстановления данных. На этом рисунке: модулированный сигнал (синий), инвертирующий вход компаратора (желтый), неинвертирующий вход компаратора (зеленый), восстановленные данные (розовый). |
Рисунок 3 иллюстрирует детали процесса демодуляции и восстановления данных. Входной амплитудно-манипулированный сигнал (синий) после обработки двумя детекторами поступает на инвертирующий и неинвертирующий входы компаратора (желтый и зеленый, соответственно). Данные, восстановленные на выходе компаратора, изображены розовым цветом.
Несколько слов об авторе
Джулия Трачсесс (Julia Truchsess) сделала успешную карьеру, создав ряд электронных игрушек, включая MicroJammers, Rhythm Rods и Singing Bouncy Baby, многие из которых выпускались миллионными тиражами. В конце 1990-х Джулии пришла в голову идея цифровых фоторамок, производство которых вскоре было организовано под брендом Digi-Frame. После дебюта Digi-Frame похожую продукцию начали выпускать многие крупные компании, но, по словам обозревателей, Digi-Frame была «Роллс-Ройсом среди рамок».
Читайте также: Шина при вывихе лодыжки
 |
| Джулия с одной из крупных моделей Digi-Frame. (Фото: David Friedman) |
Джулия возглавляет компанию Pragmatic Designs (www.pragmaticdesigns.com), созданную в 1986 г.
 |
| Джулия в домашнем офисе со своим мужем. (Фото: David Friedman) |
 |
| Рабочее место Джулии. (Фото: David Friedman) |
Перевод: AlexAAN по заказу РадиоЛоцман
Прикладная электроника — передача сигналов управления по шине питания

В данной статье будут рассмотрены методы передачи данных по проводам питания устройств. Особое внимание уделено проблемам, которые необходимо решить разработчику подобных устройств связи. Приведены примеры реализации приемной и передающей части для линий связи по силовым проводам постоянного тока, а также реализация канала связи по силовым проводам переменного тока 220 Вольт с частотой 50 Герц. Описаны типовые алгоритмы работы управляющего микроконтроллера.
Немного истории
Идея передачи сигналов управления по проводам питания не нова. Еще в 30-х годах прошлого столетия проводились смелые эксперименты по передаче таких сигналов по проводам силовой сети города. Полученные результаты были не очень впечатляющими, но не стоит забывать о том, что в те времена царствовала ламповая техника и элементная база была не столь разнообразна. Ко всем проблемам технического толка добавлялись и организационные: не было единого стандарта — каждый разработчик делал всё под себя: использовались разные частоты и модуляции. Всё это сдерживало развитие данной отрасли связи.
Принцип работы передающих и приемных устройств
Принцип работы таких устройств заключается в передаче высокочастотных сигналов по проводам питания постоянного или переменного тока. В силовых линях переменного тока чаще всего передача сигналов осуществляется в момент перехода переменного тока через ноль, т.е., когда силовое напряжение отсутствует или минимально. Дело в том, что и уровень помех в этот момент минимально. При этом полезный нам сигнал передается как бы между серией помех.
Передача высокочастотного сигнала по сети переменного тока
Для переноса высокочастотного сигнала в силовую сеть чаще всего используется трансформатор. Приемная часть обычно состоит из трансформатора связи и контура, на котором выделяются необходимые высокочастотные сигналы.
Метод переноса высокочастотных сигналов в сеть переменного тока
В силовых цепях постоянного тока используют подобный метод передачи высокочастотных сигналов, но принцип формирования такого сигнала иной: мощный ключ (транзистор) своим переходом кратковременно шунтирует сеть. Происходит небольшое уменьшение напряжение в сети (Рис. 3).
Метод формирования высокочастотных сигналов в сетях постоянного тока
На приемной стороне установлен чувствительный детектор, на котором выделяются эти просадки напряжение в линии. Далее эти сигналы поступают на вход усилителя с функцией АРУ, после чего полученные сигналы передаются в блок логики, который может быть выполнен как на микросхемах малой интеграции, так и на универсальном микроконтроллере или специализированной микросхеме, имеющей в своём составе все вышеперечисленные узлы. В последнее время микроконтроллеры всё чаще используются для таких задач благодаря низкой цене и большим возможностям. Тем более, использование программируемых устройств позволяет изменять назначение таких устройств, загрузив в них новую программу — это значительно проще и дешевле, чем изготовить новое электронное устройство с десятком микросхем…
Блок-схема современного PLC-модема

Достоинства и недостатки данного типа связи
Достоинством данного типа связи является совместное использование уже имеющейся проводной линии силовой сети. Т.е., не требуется производить монтаж линии связи, да и розетка есть практически в любой комнате.
К минусам относится как техническая сложность устройства, так и невысокая скорость при передаче данных на расстояния больше, чем 100-300 метров.
Также не стоит забывать, что данный канал связи можно организовать только между теми устройствами, которые подключены к одной фазе сети и только в пределах одной трансформаторной подстанции — высокочастотные сигналы не могут пройти через обмотки трансформатора электрической подстанции.
В принципе, последнее ограничение частично снимается использованием пассивных или активных ретрансляторов высокочастотных сигналов. Их используют как для передачи сигналов на другую фазу, так и для передачи сигналов в линию другого трансформатора.
Технические сложности реализации канала связи
Организация надежного канала связи по силовой сети — задача нетривиальная. Дело в том, что параметры сети непостоянны, они меняются в зависимости от времени суток: изменяется количество подключенных к сети устройств, их тип и мощность. Еще одной из негативных особенностей электрических сетей стран бывшего СССР является «гегемония» — мощные трансформаторные подстанции, которые питают целые кварталы! Соответственно, на одну фазу трансформатора подключены сотни абонентов, в квартире каждого из них имеется большое количество всевозможных устройств. Это как устройства с трансформаторными блоками питания, так и устройства с импульсными блоками питания. Последние зачастую выполнены с нарушениями в плане электромагнитных излучений — помех, что создает весьма высокий уровень помех в силовой сети здания и города в частности.
Во многих странах для питания зданий используются компактные трансформаторные устройства. Один такой трансформатор питает от 3 до 7 квартир или домов. Следовательно, качество электроэнергии, поступающей к абонентам, значительно выше, чем в наших электрических сетях. Также и сопротивление между фазным проводом и нулем выше. Все эти факторы позволяют иметь лучшие условия для передачи данных по квартире или зданию, чем имеем мы в наших условиях.
Читайте также: Шины в мурманске vianor
Большое количество подключенных в сеть устройств приводит к низкому сопротивлению между фазным проводом и нулем, оно может составлять 1-3 ома, а иногда и еще меньше. Согласитесь, что «раскачать» такую низкоомную нагрузку весьма сложно. Ко всему, не забывайте, что сети весьма значительны по площади, следовательно, имеют большую емкость и индуктивность. Все эти факторы определяют сам принцип построения такого канала связи: мощный выход передатчика и высокая чувствительность приемника. Поэтому используются сигналы высокой частоты: сеть имеет большее сопротивление для высоких частот.
Не меньшей проблемой является плохое состояние силовых сетей, как в целом, так и внутри строений. Последние часто выполнены с нарушениями, так же нарушается даже минимальное требование: магистраль выполняется более толстым проводом, чем отходящие питающие линии в комнаты. Электрикам известен такой параметр, как «сопротивление петли фаза-ноль». Его смысл сводится к простой зависимости: чем ближе к электрической подстанции, тем толще должны быть провода, т.е., сечение проводников должно быть больше.
Если сечение проводов выбрано неверно, прокладка магистральной линии выполнена «как получилось», то сопротивление линии гасит высокочастотные сигналы. Исправить ситуацию можно или улучшив чувствительность приемника, или увеличив мощность передатчика. И первое, и второе проблематично. Во-первых, в линии связи присутствуют помехи, поэтому увеличение чувствительности приемника до уровня помех не даст увеличения достоверности приема сигналов. Увеличение мощности передатчика может создавать помехи другим устройствам, поэтому также это не является панацеей.
Распространенные стандарты. Стандарт Х10
Наиболее известным из стандартов передачи команд по силовой сети является Х10. Данный стандарт был разработан очень давно, в 1975 году шотландской компанией «Pico Electronics». Данные передаются с помощью пачки импульсов частотой 120 кГц и длительностью 1мс. Они синхронизированы с моментом перехода переменного тока через нулевое значение. За один переход через нуль передаётся один бит информации. Приёмник ожидает такой сигнал в течение 200 мкс. Наличие импульса вспышки в окне означает логическую «единицу», отсутствие — логический «ноль». Биты передаются дважды: первый раз в прямом виде, второй раз инвертировано. Обычно модули выполняются как отдельные устройства, но сейчас всё чаще выполняются не на основе разных компонентов, а с использованием микроконтроллера. Это уменьшает размер приемника, что позволяет встроить «умную начинку» даже в патрон электрической лампы или дверной звонок.
Как говорилось ранее, высокочастотный сигнал не может распространяться дальше трансформаторной подстанции и фазы. Поэтому для получения связи на другой фазе используют так называемые активные ретрансляторы. Но необходимо учитывать, что приемник слушает сигнал только в определенные моменты времени. Поэтому используют или «умные» приемники, с измененными параметрами
У данного стандарта связи есть как плюсы, так и минусы. Во-первых, он разработал очень давно, тогда не было микроконтроллеров, и вся схемотехника была аналоговой, с использованием многочисленных компонентов. Поэтому и протокол связи очень низкоскоростной: за один период сети передается не более одного бита. Дело в том, что бит передается дважды: в первом полупериоде он передается в прямом виде, а во втором полупериоде — инверсно. Во-вторых, некоторые команды передаются группами. Это еще больше увеличивает время обмена данными.
Также значительным недостатком этого протокола является отсутствие подтверждения приема команды устройством. Т.е., послав команду, мы не можем быть уверены в гарантированной его доставке получателю. Это также не способствует распространению данного стандарта.
Собственный опыт. Изобретаем велосипед
Опробовав в реальных условиях многочисленные готовые устройства, позволяющие передать команды по силовой сети, я пришел к неутешительному выводу: в домашних условиях, с ограниченным бюджетом, не имея специализированных приборов и (чего скрывать-то?) знаний, изобрести что-то гениальное не получится. Но ничто и ничто не мешает сделать приятную поделку для себя, под свои конкретные условия. Под этим подразумевается и область применения такого изделия, расстояния, на которые необходимо передавать команды, а также функциональность такого устройства.
Выполним некоторые формальности в виде некого подобия технического задания для нашего проекта:
- устройство должно передавать данные по проводам силовой сети;
- данные должны передаваться в «паузах» тока, т.е., когда напряжение в сети минимально;
- надежность канала связи обеспечивается как аппаратно (оптимальным уровнем сигнала в точке приема), так и программно (данные передаются с контрольной суммой для обнаружения повреждения принятых данных, команды передаются несколько раз, факт получения команды приемным устройством подтверждается посылкой соответствующего сигнала обратно к главному устройству);
- упростим до необходимого уровня как протоколы обмена данными между устройствами в сети, так и тип модуляции. Будем считать, что один бит данных передается 1 миллисекунду. Единица будет передаваться в виде пачки импульсов этой длительности, а ноль — её отсутствием;
- в сети все устройства слушают сигналы, но выполняет полученную команду только то устройство, которому адресована такая команда. Т.е., у каждого из устройств есть свой индивидуальный адрес — номер.
Читайте также: Что такое внешняя шина компьютера
Сама схемотехника исполнительной части таких устройств может быть разной. Нас интересует схема приемной и передающей части.
На рисунке показана схема реального устройства, передающего команды по силовой сети. Исполнительная часть устройства управляет яркостью свечения лампы, т.е., является диммером.

Рассмотрим схему подробнее. Трансформатор Т1 и диодный мост D1-D4 обеспечивают питание устройства. Узел R8\R11, диоде D6 и транзистор Q1 обеспечивают форматирование сигнала, указывающего на минимальное напряжение в силовой сети (частота 100 гц). Кнопки S1-S3 используются для местного управления работой диммера: изменяют яркость свечения лампы, позволяют сохранить по умолчанию этот параметр, а также время нарастания и угасания лампы. Светодиод LED отображает режимы работы диммера и факт прима сигналов. Остальные светодиоды отображают яркость свечения лампы и время изменения яркости.
Резисторы R11 и R12 образуют делитель напряжения и используются для задания «чувствительности» приёмной части устройства. Изменяя соотношения сопротивления этих резисторов можно влиять на реакцию устройства как на помехи, так и на полезный сигнал.
Трансформатор связи Т2 используется для гальванической развязки приёмной и передающей частей устройства, а также передаёт высокочастотные сигналы в силовую сеть здания.
Передающая часть выполнена на транзисторе Q2 и одной из обмоток трансформатора Т2. Обратите внимание на стабилитрон D5 — именно он защищает переход транзистора от пробоя при кратковременных высоковольтных помехах в сети.
Приёмная часть несколько сложнее: одна из обмоток трансформатора Т2 вместе с параллельным колебательным контуром L1\C2 образуют сложную схему приёмного тракта. Диоды D8 и D9 защищают от предельного значения напряжения вход микроконтроллера. Благодаря этим диодам напряжение не может превысить значение питающего напряжения (в нашем случае 5 Вольт) и не может стать отрицательным ниже минус 0.3-0.5 Вольт.
Процесс приёма сигналов производиться следующим образом. Опрос кнопок и работа с индикацией каких-либо особенностей не имеют. Поэтому их работу описывать не стану.
Подпрограмма приёма ожидает сигнала перехода тока через ноль. По наступлению этого события запускается процедура опроса аналогового компаратора, которая длится около 250 микросекунд. Если никаких сигналов получено не было, то подпрограмма начинает свою работу с самого начала.
При получении любого сигнала (компаратор выдал на своём выходе логическую единицу) запускается процедура анализа полученного сигнала: в течение определенного времени производится опрос компаратора на наличие длинного сигнала. Если принятый сигнал имеет необходимую длительность, то принятый сигнал признается достоверным. После этого запускается процедура приёма необходимого количества бит данных, переданных удаленным устройством.
Получив все данные, производится их анализ на факт совпадения с принятой в этой же посылке контрольной суммой. Если данные приняты достоверно, то команда признаётся достоверной и выполняется. В ином случае принятые данные игнорируются, и программа выполняется заново.
Процесс передачи сигналов в сеть также полностью выполняется микроконтроллером. При необходимости передачи данных подпрограмма ожидает стартовое условие: получение сигнала перехода тока через ноль. Получив этот сигнал, выдерживается пауза в 80-100 микросекунд, после чего в силовую сеть передается пачка импульсов необходимой частоты и длительности. Высокочастотные сигналы практически без потерь проходят через небольшую ёмкость высоковольтного конденсатора С1 в сеть. Пачки необходимой частоты формируются с использованием аппаратного ШИМ-генератора, имеющегося в данном микроконтроллере. Как показали эксперименты, наиболее оптимальной частота передачи сигналов лежит в пределах 90-120 Кгц. Эти частоты разрешены к использованию без необходимости регистрации в соответствующих органах надзора как в России, так и Европе. (Стандарт CENELEC)
А теперь ответ на самый часто получаемый вопрос: какова дальность связи между такими устройствами? Ответ прост: на дальность связи влияет множество факторов: качество силовых линий, наличие «скруток» и монтажных коробок, тип нагрузки и её мощность …
Из практики: в небольшом городе, на силовой линии, питающей 30-50 частных домов, утром и днём (когда электрическими приборами пользуются меньше) дальность связи значительно выше, чем в крупном городе с сотней квартир на одной фазе.
Отвечу и на второй распространенный вопрос: как увеличить дальность связи? Для этого можно увеличить мощность передаваемого в силовую сеть сигнала, а также улучшить приёмную часть устройства.
Усилитель мощности можно выполнить на распространенной микросхеме TDA2030 или TDA2003 (хотя заявленные производителем параметры иные, но они неплохо работают).
Приёмная часть более сложна к доработке:
- добавить входной усилитель и АРУ;
- добавить узкополосные фильтры на входе устройства. Самое простое решение таково: последовательный контур, настроенный на необходимую частоту.