

- 32-битный процессор с частотой 600МГц
- Возможность интеграции с любым GPS-приемником, поддерживающим протокол NMEA 0183
Программируемый логический контроллер (ПЛК) CPM711 предназначен для управления модулями ввода–вывода FASTWEL-I/O в системах сбора и обработки данных, построенных на базе интерфейса CAN и протоколов прикладного уровня CANopen.
Контроллер CPM711 поддерживает все модули FASTWEL-I/O, автоматически определяет состав подключенных модулей, производит конфигурацию модулей.
Контроллер CPM711 должен быть запрограммирован пользователем в среде программирования CoDeSys, адаптированной для системы FASTWEL-I/O.
Контроллер имеет встроенный источник питания для модулей ввода–вывода, установленных на внутренней шине FBUS Цепи интерфейса CAN гальванически изолированы от внутренних цепей контроллера CPM711.
Подключение к внешней полевой шине осуществляется с помощью соединителя интерфейса CAN. Ответная часть соединителя входит в комплект поставки контроллера
Адрес контроллера в сети CANopen и скорость обмена устанавливаются программно в среде разработки CoDeSys 2.3
Контроллер, выступая в роли мастера узла сети, может интегрироваться с любым GPS-приемником, поддерживающим протокол NMEA 0183 через коммуникационный модуль NIM742. Встроенное в мастер приложение CoDeSys 2.3 определяет точное время на основе данных GPS-приемника и корректирует системные часы. При использовании GPS-приемника, поддерживающего формирование сигнала 1PPS и подключенного к коммуникационному модулю NIM742, точность привязки к единому времени может составлять единицы миллисекунд. Данный функционал позволяет встраивать узлы и подсети Fastwel I/O на любом уровне систем сбора данных и управления, требующих наличия точного единого времени для синхронизации управления технологическими процессами и точного учёта показателей его работы, например, в АИИС КУЭ и АСУ ТП с синхронизацией времени
«Раз, два, три – ёлочка гори!» или мой первый взгляд на контроллер CANNY 3 tiny
«Новый год» это мандарины, оливье, выходные и конечно же подарки.
Как вы, уже наверняка догадались я неожиданно стал обладателем микроконтроллера CANNY 3 Tiny. Правда я особо DIY электроникой не увлекаюсь и последний раз сам пытался что-то подключить к контроллеру почти семь лет назад, когда делал подсветку для петрушки с помощью клона Arduino. Но не пропадать же добру? Надо-таки посмотреть, что же это за зверь такой.
Итак, если верить сайту разработчиков – их продукция широко применяется и даже устанавливается в КАМАЗы, участвующие в ралли «Дакар». При этом основная особенность их контроллеров в том, что для программирования не придется написать ни одной строчки кода. Вся программа разрабатывается в виде блок схемы. Как человек далекий от мира DIY я был весьма заинтригован.
И всё бы хорошо, но есть одна загвоздка. Я в прошлом году честно хотел прикупить себе пару «Дакаровских» КАМАЗов, но не успел взять их со скидкой в «Черную пятницу». Так что нам придется как-то просто и элегантно выкручиваться из этой ситуации.
В данной статье мы подключим к контроллеру кнопку и красный светодиод «пиранья», после чего запрограммируем их так, чтобы светодиод включался и отключался по нажатию на кнопку.
Хотите присоединится к моему безудержному новогоднему веселью? Тогда милости прошу под кат.
Кстати, на «Хабре» уже была статья про контроллеры CANNY, но во-первых там был другой контроллер, а во вторых ПО для разработки программ с того момента устарело. В итоге, чтобы просто разобраться как поморгать встроенным в контроллер зеленым светодиодом у меня ушел примерно час. Отчасти именно поэтому я решил поделиться с вами моими попытками «обуздать» контроллер. А еще отчасти просто потому, что я люблю писать на «Хабр», когда есть свободное время.
Прежде чем мы пойдем дальше, считаю своим долгом предупредить читателей. Несмотря на то, что эта статья представлена как «туториал», я не являюсь экспертом ни в микроэлектронике, ни в программировании. Просто поделюсь тем, в чем сам успел разобраться, чтобы сэкономить вам время.
Вот о чем пойдет в статье речь:
Часть I: Распаковка и знакомство
Для начала, необходимо сказать хотя бы пару слов о нашем герое статьи. Контроллер CANNY 3 tiny является самым бюджетным в семействе контроллеров CANNY. Старшие братья CANNY 3 tiny – контроллеры серий CANNY 7 и CANNY 5 умеют работать с шиной CAN автомобиля. Наш младший брат, также как и мой старенький автомобиль марки «Жигули», знать не знает ничего о шине CAN и спокойно себе живет.
Более подробно информация о контроллере представлена в соответствующем разделе Wiki. Еще у разработчиков есть раздел на форуме, благодаря которому я в итоге разобрался, как настраивать регистры контроллера на вход и выход.
Но к вопросам программирования мы вернемся, позже. Давайте наконец, посмотрим, на нежданный подарок.
Открыв коробку, я испытал короткое чувство умиления. Контроллер реально маленький. Да простят мне фанаты неуместное сравнение, но он — почти как «малыш Йода».
Если верить интернет-магазинам у контроллера есть два варианта комплектации: без клеммной колодки и жгута, а также с ними. Учитывая мою криворукость в плане «припаять что-нибудь» я очень рад тому, что мне досталась версия с клеммной колодкой и жгутом.
Еще несколько фотографий контроллера и жгута спрячу под спойлером.
Часть II: Подключение схемы
Как я уже сказал, мы будем подключать к контроллеру светодиод (в нашем случае «пиранью»), но можно любой (просто у меня не было другого). Управлять светодиодом мы будем при помощи кнопки. Алгоритм работы такой: один раз нажал на кнопку и светодиод – горит, еще раз нажал – не горит.
Давайте кратко опишем особенности контроллера важные дня нашего случая:
- Питать контроллер будем от microUSB зарядника (в моем случае 5В, 1 А);
- У контроллера есть 6 программируемых выводов, а также выводы «+» и «-»;
- Программируемые выводы могут быть настроены как в качестве «входа», так и в качестве выхода;
- Максимальный ток на выходе управляемых выводов – 100 мА;
- У выводов есть разные режимы, включая ШИМ, но мы сегодня так глубоко вдаваться не будем.
Я постарался, сделать, так чтобы вам была понятна, моя простенькая задумка и даже поставил KiCad, чтобы начертить хоть какую-то схемку.
Читайте также: Давление в шинах гольф 7 летом
Если честно я не силен в таких вопросах, да и KiCad вижу первый (или второй) раз в жизни, поэтому если найдете ошибки, обязательно скажите, чтобы я смог поправить.
Как вы надеюсь поняли из схем, в нашем проекте мы будем использовать: сам контроллер, макетную плату, токоограничивающий резистор на 80 Ом, кнопку похожую на KLS7-TS6601-5.0-180 и светодиод похожий на BL-FL7600UEC, но на самом деле вы можете их заменить на то, что будет у вас под рукой.
- Выход «-» контроллера соединяем с шиной минус;
- Выход «2» будет служить нам «плюсом», подключим его к соответствующей шине на макетной плате;
- Вывод «1» Будет работать на вход и получать сигнал в случае, если кнопка замкнет цепь (при нажатии);
- Выход «4» будет питать наш светодиод, для удобства я его подключил к другой шине «+» на макетной плате, но это делать не обязательно.
- Ёлочка является атрибутом нового года и всячески оправдывает название данной статьи.
Часть III: Программирование
Чтобы запрограммировать контроллер нам понадобится среда разработки CannyLab, скачать её можно с сайта разработчика. На момент написания статьи актуальная версия была 1.41. Среда разработки не требует установки, надо просто распаковать архив в какую-нибудь папку.
Прежде чем писать код для нашей схемы, давайте убедимся, что у нас все работает.
В моем случае перво-наперво надо было записать системное ПО в контроллер.
Подключаем контроллер через microUSB кабель к компьютеру. В моем случае на Windows 10 никаких драйверов вроде отдельно ставить не пришлось.
Убеждаемся, что контроллер подключен, если нет жмем на кнопку «Подключить» (выглядит как два звена цепочки)
Далее надо вызвать диалог по адресу «Устройство -> Системное ПО -> Записать» и выбрать подходящий файл (в моем случае «c3tinyv00108.ccx»). На всякий случай ниже оставлю скриншот.
Теперь можно формировать программу.
Программа формируется путем перетаскивания элементов слева на белое поле рабочего пространства и последующего соединения элементов между собой.
Для того, чтобы поморгать встроенным светодиодом в режиме ШИМ нам понадобится 3 константы, блок генератор сигнала ШИМ и регистр записи.
Соединяем все как на картинке.
Значения константам и регистрам можно задать если сделать по ним двойной клик ЛКМ.
Что же это за загадочные значения констант?
- «3000» – период в 3 секунды;
- «1500» – говорит нам что наш светодиод из трех секунд будет светиться лишь полторы;
- «1» – просто запускает генератор.
Чтобы долго не искать нужное значение регистра введите в окошке «Фильтр», строку «светодиод»
Запишем программу в память контроллера.
Далее отсоединим контроллер от компьютера и переключим провод в USB зарядку.
Зеленый огонек моргает с периодом в три секунды, значит все работает как мы и хотели.
Еще пара слов про среду разработки, во-первых она проводит проверку ошибок в диаграмме перед её заливкой в контроллер, а значит есть некоторая «защита от дурака». Во-вторых если нажать на кнопку в виде «жука», то откроется эмулятор работы диаграммы, но об этом как-нибудь в другой раз.
Перейдем к программе для схемы.
Соберите диаграмму как на картинке.
Чтобы не искать долго названия регистров и констант пользуйтесь фильтром по аналогии со скриншотом.
Настраивает нам выход 2 на подачу +5В, аналогично и для четвёртого канала
Поскольку канал 2 фактически используется как «+ 5 В» мы просто запишем в него константу «1» (думаю можно любое число больше нуля).
Примечание: Напряжение на выходах контроллера зависит от питающего напряжения и может измениться в зависимости от того, как вы его запитаете
А вот канал 4 у нас то дает +5В, то не дает, в зависимости от нажатия на кнопку.
Канал 1 по умолчанию настроен на вход и ничего не надо настраивать отдельно, берем его входное значение с помощью блока:
И передаем на блок логического отрицания («Не»).
Блок «Не» нужен для того, чтобы по умолчанию при включении схемы наш светодиод сразу светился. Если этот блок убрать и соединить регистр 1 канала напрямую с детектором переднего фронта, то светодиод по умолчанию будет отключен.
Детектор переднего фронта срабатывает, когда мы нажимаем кнопку и не будет подавать больше сигналов до тех пор, пока мы снова не решим на неё нажать.
Для сохранения текущего состояния используются «Т» триггер. Если ему на вход «Т» подать единицу, а на вход «С» подавать единичный импульс с выхода детектора, то наш триггер будет на выходе чередовать состояние «0» и состояние «1». Как раз именно то, что нам нужно.
Далее сигнал с выхода триггера идет на регистр выхода канала 4, который в свою очередь питает светодиод.
Обе диаграммы можно скачать с GitHub.
Часть IV: Заключение
На снимках ниже видно, что все работает (и еще видно мой палец).
Вначале статьи я упоминал про жгут, но мне было лень его зачищать и лудить, поэтому я пока использовал отдельные провода, которые у меня остались еще от опытов с Craftduino.
«А что у нас с кроссплатформенностью?» – спросите вы. Я попробовал записать код в контроллер запустив среду разработки в Linux через Wine. В итоге среда разработки запустилась, но компьютер сам контроллер не видит (возможно нужно «поколдовать» с Wine). Так, что пока нельзя говорить о кроссплатформенности решения «из коробки».
Еще одним из минусов контроллера можно назвать высокую стоимость по сравнению с некоторыми «Китайскими» подделками под Arduino, однако это отчасти компенсируется качеством. Контроллер приятно держать в руках, да и упаковано все в коробочке было очень аккуратно. Контроллер у меня даже один раз упал, но пока все работает.
Правда в оценках контроллера я, наверное, слегка субъективен. Просто мне приятно, что изделие отечественное и что разработчики пусть хоть чуть-чуть, но причастны к победам КАМАЗов на ралли «Дакар».
В целом подарком я остался доволен, визуальный стиль программирования для меня очень непривычен, но при этом у него есть свои достоинства. Думаю, больше всего он понравиться людям, учившим электронную технику и информатику еще по советским учебникам и знающим, что такое регистры, триггеры, мультиплексоры и т.д.
Читайте также: Honda pilot 2008 размер шин
UPD: Друзья, я немного отстал от жизни и слегка нарушил правила «Хабра», поэтому я удалил прямые ссылки на сайт разработчиков контроллера, чтобы статья не выглядела рекламной и соответствовала правилам. Я думаю, что ссылку на скачивание среды разработки CannyLab, и «пруфы» про КАМАЗ вы легко найдете самостоятельно.
UPD2:
Похоже, что у меня получился небольшой цикл статей, поэтому для вашего удобства я оставлю ссылки на другие статьи по теме:
CAN или не CAN? Или зачем мне сеть микроконтроллеров?
Этот вопрос мне пришлось задать себе лет десять назад или больше. Работа, которую надо было сделать, заключалась в дарении второй жизни диспетчерскому щиту. Это такая штука во всю стену, состоящая из лампочек и выключателей с переключателями. Думаю, не ошибусь, предположив, что щиты стали делать с тех пор, как появились лампочки, поскольку выключатели к тому времени, наверняка, уже были известны. А тяга к прекрасному, вообще, пришла к людям из далекой древности.
Сейчас многие предпочтут щитам дисплейные панели. Но будут ли любители дисплеев в большинстве, зависит от многого, нам неведомого. Но сейчас речь не об этом.
Каждый, кто может в течение пяти минут поддерживать разговор об электропроводке, сразу скажет мне, что щит состоит из плоских панелей, на которых размещены выключатели и лампочки, а также из ящика со множеством проводов. Ведь лампочка без проводов только для того и годится, чтобы ее или тупо разбить или, если подойти творчески и включить воображение, разместить у самого пытливого во рту и довольно быстро узнать, где находится травмпункт.
Все так и было, куча проводов, уходящих из ящика к выключателям и лампочкам, только лампочки — маленькие. Видимо, внучки знаменитой лампочки Ильича.
И вот, помнится, глянул за окно, а там 21-й век. Стало быть надо все делать заново и по-другому. Вместо лампочек — экономичные светодиоды. Вместо проводов — проводки. Вместо одного ящика — много-много маленьких ящичков, контроллеров, стало быть.
Оказалось, что если каждый контроллер сможет обслуживать четыре светодиода и два переключателя то это будет выглядеть оптимальненько. В смысле, не так ужасающе. А если через все контроллеры будет проходить шина питания и информационная шина, всего четыре провода, то появится некое изящество. Оказалось также, что контроллеров потребуется 104 штуки. По-хорошему, тут надо было бы поставить и решить задачу коммивояжера. И тогда, возможно, контроллеров потратили бы меньше. Но было не до хорошего.
К тому времени я уже знал, что такое CAN и уровень моего уважения к фирме Bosch был много выше, нежели у повара приличного ресторана или аккуратной домохозяйки. А производители автомобилей BMW, я уверен, даже ходили к инженерам Bosch в гости.
Controller Area Network, как сказали бы иностранцы, на мой взгляд, как техническое решение, возникло из желания сделать что-то, наконец, хорошо. Не скрою, все прелести результатов работы инженеров почувствуешь не сразу, как осилишь два тома стандарта, а значительно позже. Когда пообщаешься с очевидцами, опросишь свидетелей. Сейчас томов прибавилось, но, может быть, можно сразу начинать с третьего, поскольку, теперь оно называется CAN_FD. Однако, позвольте продолжить.
Еще до столкновения со щитом мне пришлось столкнуться с чужими инженерными решениями на тему использования CAN, а также наделать и своих ошибок. Ошибки обычно появляются в перерывах между чтением инструкций и изучением описаний. Хорошо, что только со второго раза они выглядят как грабли.
Теперь несколько тысяч слов для читателя, который терпимо относится к занудам и не считает их врагами.
CAN можно установить там, где раньше работал RS485 на витой паре. Витая пара — это не непременное условие, просто удобно сравнивать. Используя витую пару, по CAN, как и по RS485, можно передать сообщения от управляющего контроллера к подчиненному и получить ответ. Сходство бросается в глаза, но, давайте лучше остановимся на отличиях. Кое-какие из отличий могут нести знак минус для некоторых из читателей. Но им бы я посоветовал не огорчаться, а вспомнить закон Ломоносова.
Благодаря синхронной организации протокола разрешение коллизий на шине реализовано аппаратно, на лету, так сказать. Ниже отмечено, к чему это приводит и что это дает непоседливому инженеру.
Можно получить сообщение и без запроса.
Не надо ждать, когда ответ будет готов, можно спросить в это время еще кого-то.
Подчиненный контроллер тоже может спросить и получить ответ.
Из-за синхронной работы длина шины CAN обратно пропорциональна скорости передачи или типа того.
Максимальная скорость составляет 1 Мбод (10 — на подходе).
То, что сообщение не исказилось при передаче отправляющий знает сразу после последнего бита. Точнее, это знают все на шине.
Если сообщение исказилось для одного, попытка не засчитывается всеми.
Если сообщение удалось передать в шину, то абонент не получит его лишь при условии, что сломался.
Количество контроллеров на шине не должно превышать 127.
Сообщения ограничены по длине. Они состоят из идентификатора, указателя длины в байтах и блока данных, именно с таким количеством байт, как указано. Есть еще несколько служебных битов, но о них пока помолчим, поскольку сервис должен быть ненавязчивым. Идентификатор может быть размером 11 или 29 бит. Блок данных может содержать от 0 до 8 байт (64 — на подходе).
Для конкретики приведу немного цифр. Если хочется работать на скорости 1Мбод, то длина шины не должна быть больше 35 метров (некоторые предпочитают 40, то есть, погорячее). Если необходимо передать что-то на расстояние до 8 км, то скорость не должна превышать 5 Кбод. Кстати, читатель вправе спросить, почему килобод, а не килобит? Потому, что не все боды становятся битами. Как-то так.
Как можно распорядиться всеми этими совсем не секретными ингредиентами? Те, кто во всем видят игру в кубики, сразу вспомнят, что есть такая замечательная вещь, как CANopen и еще много красивых сочетаний и аббревиатур и нечего изобретать велосипед. Таким мне часто хочется ответить: «Разве не похожа на велосипед та яичница из двух яиц, которую многие готовят себе на завтрак? Почему бы не сходить в общепит и не взять себе омлет?». Но я лучше промолчу и продолжу, не отвлекаясь на выкрики из зала.
Читайте также: Транспортировка больных с шинами
В те времена, когда 29 битовый идентификатора еще не успели придумать, существовал только 11 битовый. Одни его стали использовать, чтобы запихнуть туда название (номер) нужного вида данных. Другие использовали как адрес контроллера, к которому обращаются. И то и другое имело смысл. Например, можно спросить так:
- А подай-ка нам, милейший, шато тринадцатого года в литровой бумажной упаковке.
Заверните мне, пожалуйста, то, что спрятано у вас на самой нижней полке справа.
Кстати, в CAN может сработать и такая конструкция:
Всем лежать! А ты быстро складывай все с полок мне в сумку.
Но этой конструкцией часто не попользуешься, поскольку после придется какое-то время ждать.
Ждать пока все ответы не выстроятся один за другим и не поступят в распоряжение запрашивающего контроллера. Мы уже ушли от кино, если что.
Меня в моем случае устроил бы вариант идентификатора в качестве адреса. Из 11 бит требовалось 7 и еще 4 оставалось на то, чтобы сделать одни сообщения более срочными по сравнению с другими, а также пометить часть контроллеров как главные.
Некоторое неудобство перекочевало сюда из RS485, а именно, адреса надо было устанавливать вручную на каждом контроллере. Затем проверять и переустанавливать. И, возможно, вернуться к предыдущему шагу и повторить.
К счастью, к тому времени уже существовали два обстоятельства.
Первое — уже появился 29 битный идентификатор. А второе то, что многие производители микроконтроллеров стали считать хорошим тоном условие, чтобы каждый чип имел свой уникальный и довольно длинный номер.
Теперь в длинном идентификаторе можно было 24 бита смело отвести для уникального адреса. Еще 5 оставалось, для заботы о том, чтобы поезда различались срочностью, направлением (туда, обратно), наличием вагона-ресторана и вагонов с повышенным комфортом.
Если перестать дурачиться и сделаться серьезным, назвать подчиненных контроллеров агентами, а остальных боссами, то можно составить таблицу. Она будет показана немного позже.
Еще немного про адресацию. Уникальный номер чипа, как правило, занимает количество битов значительно превышающее 24, например, 96 у STM32FXXX. Поэтому необходимо как-то получить 24 из 96. Я выбрал операцию XOR. Вы можете выбрать что-то другое, но небольшая проблема останется. Это совпадения адресов после редуцирования.
Вероятность появления этой проблемы крайне мала, но она есть. Она решаема, но добавляет работы наладчикам. Здесь надо вспомнить, что сообщения CAN могут не содержать данных совсем. Это нам и пригодиться при решении. Оно состоит из следующих действий.
Управляющий контроллер (босс) отправляет широковещательный запрос, на который должны ответить все агенты (это запрос с нулевым адресом). Ответные сообщения с нулевой длиной данных и совпадающими адресами не испортят друг-друга, а достигнут босса в виде одного.
Теперь останется подсчитать сколько получено ответов и сколько их должно быть. Если эти два числа совпадают, значит все в порядке. Если ответов меньше чем контроллеров, то налицо совпадение адресов и наладчикам есть работа. А если ответов больше, нежели контроллеров, то надо подумать о диссертации, поскольку, вы — на пороге открытия.
Если изменение длины сообщения рассматривать как некоторые вариации его смысла, то можно получить дополнительные возможности, о которых позже расскажу, если мама не позовет кушать.
Еще из интересного, если использовать и короткие и длинные идентификаторы одновременно, то можно получить, например, адресацию групп или частично широковещательные запросы. Но не будем пока углубляться.
Вернемся к кодированию идентификатора.
Для целей адресации в расширенном идентификаторе отведено 24 бита, а в стандартном – шесть. Адрес со значением 0x000000 является широковещательным для расширенного идентификатора. Для стандартного идентификатора нулевой адрес (6 его бит) также считается широковещательным. Пять начальных (старших) битов в длинном и коротком идентификаторе, называются заголовком, влияют на смысл сообщения и обозначаются буквами NVADR:
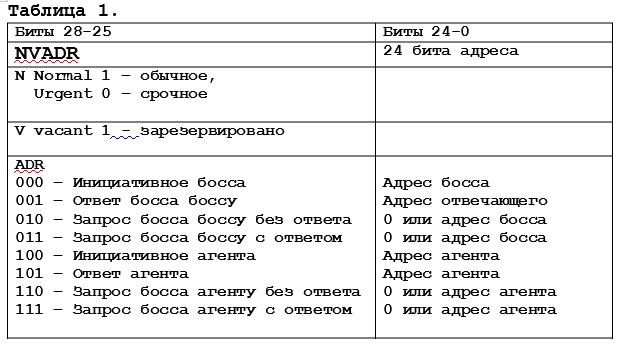
Конечно, для диспетчерского щита потребовалось реализовать только часть этой схемы. В первом проекте со щитом (или на щите, как правильно?) использовались чипы Cortex от NXP, а в следующих проектах (были и такие) уже применялись M0 от STMicroelectronics.
Пару слов об использовании коротких идентификаторов. Те шесть бит, которые отводятся для адресации, адресуют не контроллер, а группу. Эта группа при старте сначала у всех нулевая. Далее производится конфигурирование агентов, после которого часть из них или все становятся принадлежащими своей группе. Теперь запросом к группе, мы получаем ответы тех агентов, которые мы собрали в эту группу.
Теперь, немного о том, что добавляется, если по-разному трактовать сообщения с различной длиной данных. Например, запрос с нулевой длиной хорошо помогает при отладке, как уже упоминалось выше. Запрос с длиной 3 обслуживает пространство байтовых переменных размером 16384. Запрос с длиной 4 делает то же самое, но предназначен для агента-шлюза, который обслуживает CAN шину второго уровня. Эта шина может состоять из одного-двух агентов, зато удаленных на пару километров.
Запрос с длиной 5 и 6, аналогично, предназначены для пространства двухбайтовых переменных размером 4194304. Два бита используются не для адресации. Один бит управляет записью-чтением. Другой сигнализирует об ошибке.
Далее 7 и 8 обслуживают четырех байтовые слова. Их тоже 4194304.
Эти пространства являются общими для всех агентов. Каждый из них, в зависимости от предназначения, использует только отрезок пространства переменных. Контроллер для измерения температуры в двух точках представлен на фото. Это для отладки и тестирования.
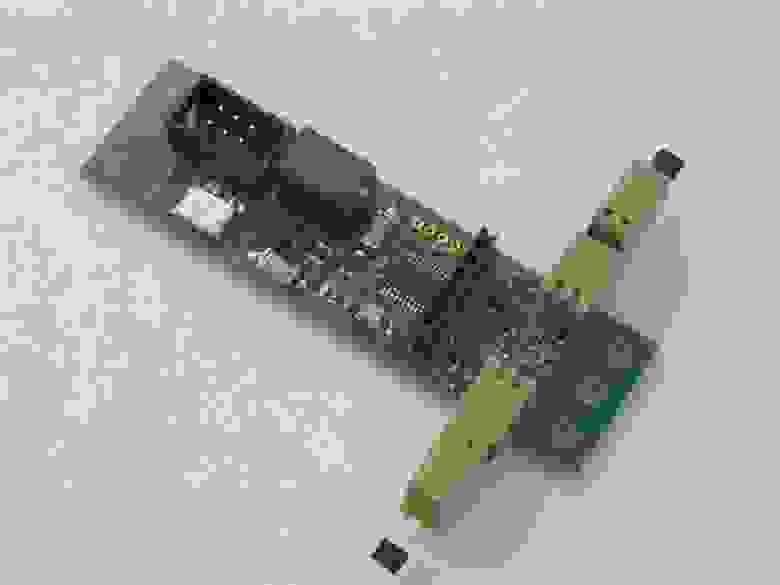
Соединяются контроллеры плоским шлейфом на 6 жил. На питание идут сдвоенные. Микросхема о двадцати ногах — это STM32F042.
С обратной стороны присутствует MAX3051, формирователь CAN в корпусе SOT23-8.
Ну вот, мама кушать зовет.
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле