LIN — это сокращение от Local Interconnect Network, это недорогой протокол последовательной связи, основанный на UART / SCI, универсальном интерфейсе асинхронного приемника / последовательной связи. Его можно использовать в различных областях, таких как автомобили, бытовая техника и офисное оборудование.
Как недорогая вспомогательная шина, шина LIN широко используется в автомобильной электронике.Шина LIN используется в низкоскоростных приложениях, таких как двери, окна, освещение и центральные замки. Фактически, CAN было бы проще реализовать эти функции в транспортных средствах на новой энергии, но она ограничена слишком большим количеством аксессуаров в автомобиле. При изготовлении она должна быть совместима с поставщиками различных аксессуаров, включая низкоскоростную поставку аксессуаров. использование LIN из соображений стоимости. Сейчас LIN все еще широко используется, надо учиться.
- Особенности LIN
- Разница между LIN и CAN
- Топология сети
- Протокол LIN
- Правила передачи
- Общая конструкция каркаса
- Интервал синхронизации
- Синхронизировать сегмент
- Защищенный сегмент идентификатора (PID)
- Тип кадра
- Сегмент данных
- Сегмент контрольной суммы
- пример
- Автомобильный справочник
- для настоящих любителей техники
- LIN шина
- Шина LIN
- Система передачи в шине LIN
- Доступ к шине LIN
- Протокол LIN
- Фрейм данных LIN
- Заголовок
- Синхронизация LIN
- Идентификатор LIN
- Поле данных
- Описательный файл LIN
- Составление графика отправки сообщений
- Управление сетью LIN
- 💥 Видео
Особенности LIN
- Последовательная связь
- Однопроводная передача, напряжение на шине 12В
- Помехи между линиями относительно небольшие, что экономит ресурсы линии и имеет большое расстояние передачи (не более 40 метров).
- Отвечает требованиям большинства низкоскоростных автомобилей
- Никаких конфликтов, никакого арбитража
- Почти все микроконтроллеры имеют аппаратную основу шины LIN.
- По сравнению с CAN, стоимость может быть значительно снижена
- Используйте поле синхронизации в заголовке, чтобы добиться синхронизации без линий часов, что значительно снижает затраты
- Передача детерминированная, и время распространения можно рассчитать заранее.
- В целях повышения EMC протокол LIN ограничивает максимальную скорость передачи до 20 Кбит / с.
Разница между LIN и CAN
Однопроводная передача, низкая скорость передачи
Шина LIN физически представляет собой шину с открытым стоком с подтягивающим коллектором 12 В, и несколько узлов могут быть подключены параллельно к главному узлу. Он аналогичен линии SDA IIC, но не требует линии синхронизации SCL.LIN использует скорость передачи данных, согласованную между хостом и подчиненным устройством, аналогично UART. В отличие от последовательного порта, он синхронизируется через поле синхронизации, и передача более надежна. По сравнению со структурой CAN с витой парой, помехоустойчивость линии LIN относительно мала.Чтобы улучшить характеристики EMC, скорость связи ограничена до 20 Кбит / с.
Структура одного ведущего и нескольких ведомых
Структура шины LIN представляет собой звездообразную модель структуры главный-подчиненный, и все подчиненные устройства подключены к хосту. Передача может быть инициирована только мастером, а подчиненное устройство не может активно инициировать запрос. Ведомое устройство может рассматриваться как издатель сообщения, а ведущее устройство — как подписчик сообщения. Чтобы получить сообщение (значение переменной), ведущее устройство должно постоянно читать соответствующее сообщение. Эта структура определяет, что шина LIN может передавать только небольшое количество сообщений, чтобы гарантировать характер обновлений сообщений в реальном времени.
Облегченный стек протоколов обработки
В стеке протокола передачи CAN-шины он занимает значительный объем кода, включая уровень драйвера CAN, TP, UDS и т.д .; LIN не должен быть таким сложным, только простые драйверы, таблицы планирования, пробуждение в спящем режиме и т.д. Таким образом, объем кода меньше на порядок, но в службе LIN верхнего уровня его все еще необходимо преобразовать в сигнал CAN для передачи, поэтому, наконец, LIN все равно должен вернуться к сигналу CAN.
Видео:Как работает LIN шина автомобиля. K-Line L-Line шины данных. Лин шина автомобиля. Lin-bus networkСкачать

Топология сети

Шина LIN представляет собой звездообразную структуру с одним ведущим и несколькими ведомыми устройствами.Шина LIN обычно не существует одна, и узел часто подключен к сети верхнего уровня (например, CAN).
Узел не обязательно соответствует ЭБУ, поскольку ЭБУ может предоставлять несколько интерфейсов LIN.
Видео:Lin-scan (Анализатор ЛИН шины)Скачать
Протокол LIN
Правила передачи
Рама в основном содержитЗаголовок кадрас участиемответДве части
- Задача хоста отвечает за отправку заголовка кадра
- Подчиненная задача анализирует заголовок кадра после его получения, а затем решает, отправлять ли ответ, получать ответ или не отвечать.
Общая конструкция каркаса
Заголовок кадра включаетИнтервал синхронизации、Синхронизировать сегментс участиемЗащищенный сегмент идентификатора (PID), Отправлено хост-узлом
Читайте также: Шины для автомобиля kia
Ответ включаетСегмент данныхс участиемСегмент контрольной суммы, Отправлено подчиненным узлом
0 Доминирующий уровень, 1 Рецессивный уровень
Интервал синхронизации
Интервал синхронизации состоит изИнтервал синхронизациис участиемИнтервал синхронизациисочинение
- Интервал синхронизации указывает на начало кадра
- Сегмент интервала синхронизации имеет не менее 13 доминирующих битов, а разделитель имеет хотя бы один невидимый бит.
- Сегмент интервала синхронизации не соответствует формату байтового поля, остальные сегменты следуют
- Он считается интервальным сигналом, когда по крайней мере 11 доминирующих битов постоянно отслеживаются из узла.
Синхронизировать сегмент
Байт-поле: стандартный формат передачи данных UART
Поле байта включает 1 стартовый бит (доминантный) + 8 бит данных + 1 стоповый бит (рецессивный).
- Для передачи данных LSB отправляется первым, а MSB — последним.
- Здесь, чтобы гарантировать, что все подчиненные узлы имеют ту же скорость передачи, что и главный узел, для отправки и получения данных
- Сегмент синхронизации фиксируется равным одному байту, а значение фиксируется равным 0x55.
Защищенный сегмент идентификатора (PID)
Защищенный сегмент идентификатора состоит из6-битный идентификатор кадрас участием2 бита четностисочинение
PID — это не адрес подчиненного узла, а идентификатор сообщения, на которое вы хотите подписаться. Подчиненный узел может предоставлять услуги с несколькими идентификаторами сообщений.Например, ЭБУ управления освещением автомобиля может предоставлять несколько услуг идентификаторов LIN, таких как управление освещением, состояние и код неисправности. Адрес ведомого узла является неявным. Идентификатор сообщения соответствующие отношения.
Диапазон идентификаторов кадров: 0x00
Здесь, поскольку данные отправляются первыми, отправляется LSB, поэтому первым отправляется P1 бита четности. При отправке бит над идентификатором кадра занят 2 битами четности, поэтому идентификатор эквивалентен младшим 6 битам весь кадр вместо старших 6 бит
Формула проверки выглядит следующим образом, где «represents» представляет операцию «исключающее ИЛИ», а «¬» представляет операцию «отрицание».
Из формулы видно, что PID не будет иметь все 0 или все 1. Следовательно, если подчиненный узел получает «0xFF» или «0x00», это может быть расценено как ошибка передачи.
Тип кадра
Сегмент данных
Данные, отправляемые узлом, находятся в сегменте данных, старшие 8 байтов, младшие DATA1 отправляются первыми, а отправка увеличивается последовательно.
Кадр данных LIN может передавать до 8 байтов. Согласно LUN 2.x, количество байтов, которое может передать LIN, может составлять 2, 4, 8 вместо любого числа в пределах 1-8. Вообще говоря, в автомобиле выбирается одинаковое количество байтов, чаще всего используется 8 байтов на кадр.
Сегмент данных содержит два типа данных,сигналилиДиагностическое сообщение
Когда тип идентификатора кадра представляет собой кадр, несущий сигнал, сегмент данных хранит сигнал, а идентификатор кадра соответствует одному или нескольким сигналам.
Если тип идентификатора кадра является диагностическим, в сегменте данных хранятся диагностические сообщения.
Сегмент контрольной суммы
Раздел контрольной суммы предназначен для проверки содержимого, передаваемого во фрейме.
Контрольная сумма делится наСтандартная контрольная суммас участиемРасширенная контрольная сумма
- Стандартная контрольная сумма: используется в диагностических кадрах
- Расширенная контрольная сумма: кадры, отличные от диагностических.
- Байт
Независимо от того, используется ли стандартная контрольная сумма или расширенная контрольная сумма, управляет хост-узел, а публикующий узел и каждый слушающий узел определяют, какую контрольную сумму использовать в соответствии с идентификатором кадра.
Метод проверки состоит в том, чтобы добавить каждый байт объекта проверки с помощью двоичного сложения (если результат больше или равен 256, вычесть 255), побитно инвертировать окончательную сумму и использовать результат в качестве контрольной суммы отправки. В соответствии с типом контрольной суммы получатель выполняет то же двоичное сложение с переносом полученных данных, и окончательная сумма не инвертируется, и добавляет сумму к полученной контрольной сумме. Если результат равен 0xFF, то контрольная сумма Нет ошибок, это в определенной степени гарантирует правильность передачи данных.
пример
Используя стандартную контрольную сумму, Data1 = 0x4A, Data2 = 0x55, Data3 = 0x93, Data4 = 0xE5, метод расчета показан в таблице 3.3:
Видео:LIN шина - пример работы. LIN bus exampleСкачать
Автомобильный справочник
Видео:Диагностика генератора "cтарт-стоп" по шине LINСкачать
для настоящих любителей техники
Видео:Кан шина, что это? Поймет школьник! принцип работыСкачать
LIN шина
LIN протокол разработан для создания дешевых локальных сетей обмена данными на коротких расстояниях. Он служит для передачи входных воздействий, состояний переключателей на панелях управления, а также ответных действий различных устройств, соединенных в одну систему через LIN.
Читайте также: Масло для звездочек пильных шин
Первая спецификация стандарта под брендом LIN была издана в 1999 году по инициативе консорциума европейских автопроизводителей и других известных компаний, включая Audi AG, BMW AG, Daimler Chrysler AG, Motorola Inc., Volcano Communications Technologies AB, Volkswagen AG и VolvoCar Corporation. Последняя спецификация, LIN 2.2, издана в 2010 году. В настоящее время документы стандарта переданы под контроль Международной организации по стандартизации (ISO), где стандарту был присвоено новое наименование ISO 17987. В связи с политикой ISO копия стандарта стала платной.
Видео:Блок управления, генератор, CAN или LIN шина либо АКБ? P0401, P0523, U1113, U1132, U0106 (Видео 90)Скачать
Шина LIN
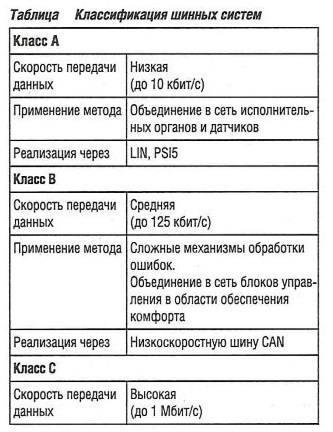
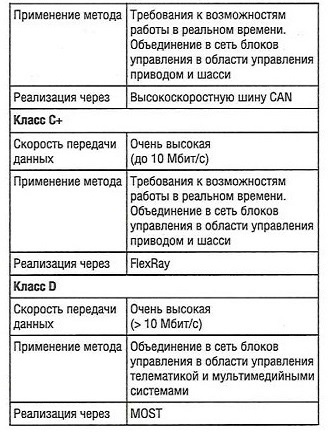
LIN шина (локальная сеть воздействия) была разработана для удовлетворения потребностей в связи для систем класса А (см. табл. «Классификация шинных систем» ) с использованием самого экономичного оборудования. Типичные области применения:
- Дверной модуль с дверным замком;
- Приводы стеклоподъемников;
- Регулировка боковых зеркал заднего вида;
- Система кондиционирования (передача сигналов от элемента управления, активация вентилятора свежего воздуха).
Текущую спецификацию LIN можно найти на сайте консорциума LIN.
Важные особенности шины LIN:
- Концепции с одним ведущим и несколькими ведомыми устройствами;
- Небольшая стоимость оборудования за счет передачи данных по неэкранированному однопроводному кабелю;
- Самосинхронизация ведомых устройств без кварцевого генератора;
- Связь в виде очень коротких сообщений;
- Скорость передачи данных до 20 кбит/с;
- Длина шины до 40 м, до 16 узлов.
Видео:Управление корректором фар по шине LINСкачать
Система передачи в шине LIN
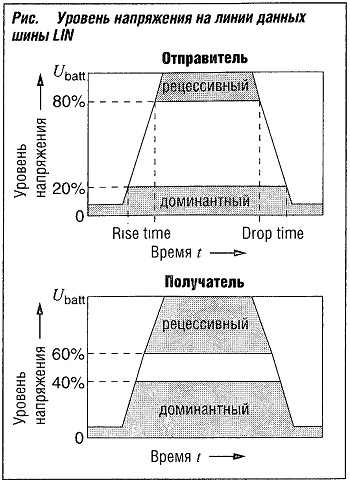
Шина LIN представляет собой неэкранированный однопроводный кабель. Уровень шины может принимать два логических состояния. Доминантный уровень соответствует напряжению приблизительно 0 В (масса) и представляет собой логический 0. Рецессивный Уровень соответствует напряжению батареи Ubatt и представляет собой логическую 1.
Из-за наличия разных вариантов электрических цепей уровни могут быть разными. Определение допусков на передачу и прием в области рецессивных и доминантных уровней обеспечивает стабильную передачу данных. Диапазоны допусков шире на приемном конце (рис. «Уровень напряжения на линии данных шины LIN» ), чтобы действительные сигналы тоже можно было получать, несмотря па излучаемые помехи.
Скорость передачи по шине LIN ограничена величиной 20 кбит/с. Это компромисс между большой крутизной фронта импульсов, необходимой для синхронизации ведомых устройств, с одной стороны, и небольшой его крутизной, необходимой для улучшения ЕМС — с другой. Рекомендуемая скорость передачи составляют 2400, 9600 и 19200 бит/с. Минимально допустимая скорость составляет 1 кбит/с.
Максимальное количество узлов не регламентируется в спецификации LIN. Теоретически оно ограничено количеством доступных идентификаторов сообщений. Возможности линии и узла и крутизна фронта импульсов ограничивают сочетание длины и количества узлов сети LIN. Рекомендуется не более 16 узлов.
Пользователи шины обычно располагаются в линейной топологии; однако эта топология не является обязательной.
Видео:Оживление по шине LIN блока кнопок стеклоподъемников от Mercedes Benz W220Скачать
Доступ к шине LIN
Доступ к шине LIN обеспечивается на основе доступа «ведущий-ведомый». В сети имеется ведущее устройство, инициирующее каждое сообщение. Ведомое устройство имеет возможность ответить. Обмен сообщениями происходит между ведущим и одним, несколькими либо всеми ведомыми устройствами.
Во время обмена сообщениями между ведущим и ведомым устройством возможны следующие взаимосвязи:
- Сообщение с ответом ведомого: ведущее устройство передает сообщение одному или нескольким ведомым устройствам и запрашивает данные (например, состояния измеренных значений);
- Сообщение с инструкцией ведущего: ведущее устройство передает инструкции ведомому устройству (например, включение сервопривода);
- Сообщение для использования: ведущее устройство инициирует связь между двумя ведомыми устройствами.
Видео:Подробно про CAN шинуСкачать
Протокол LIN
Фрейм данных LIN
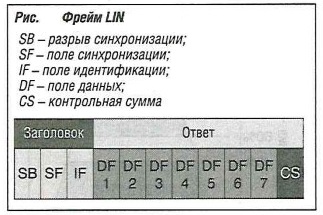
Информация на шине LIN встраивается в определенный фрейм данных, фрейм LIN (рис. «Фрейм LIN» ). Инициированное ведущим устройством сообщение начинается с заголовка. В поле сообщения (ответ) содержится различная информация, зависящая от типа сообщения. Если ведущее устройство передает инструкции ведомому устройству, то оно описывает поле сообщения данными, которые должно использовать ведомое устройство. В случае запроса данных адресуемое ведомое устройство описывает поле сообщения данными, запрошенными ведущим устройством.
Заголовок
Заголовок состоит из разрыва синхронизации, поля синхронизации и поля идентификации.
Синхронизация LIN
Синхронизация происходит в начале каждого фрейма для обеспечения последовательной передачи данных между ведущим и ведомыми устройствами. Сначала разрывом синхронизации четко определяется начало фрейма. Он состоит из не менее 13 последовательных доминантных уровней и одного рецессивного уровня.
Читайте также: Какое давление в шинах должно быть летом лада веста
После разрыва синхронизации ведущее устройство передает поле синхронизации, состоящее из последовательности битов 01010101. Это дает ведомым устройствам возможность адаптироваться к временной оси ведущего. Тактовый импульс ведущего устройства не должен отличаться от номинального значения более чем на ±0,5%. Тактовый импульс ведомых устройств перед синхронизацией может иметь разброс ±15 %, если синхронизация к концу сообщения достигает уровня ±2 %. Таким образом, ведомым устройствам не нужен дорогой кварцевый генератор — они могут быть выполнены, например, с экономичной резистивно-емкостной цепью.
Идентификатор LIN
Третий байт в заголовке служит идентификатором LIN. По аналогии с шиной CAN здесь используется адресация по содержанию — идентификатор дает информацию о содержании сообщения. Все подключенные к шине узлы на основании этой информации решают, намерены ли они получить и обработать сообщение или же проигнорировать его (фильтрация при приемке).
Шесть или восемь битов в поле идентификатора определяют сам идентификатор; из них получается 64 возможных идентификатора (ID). Имеются следующие значения:
- ID = 0 — 59: передача сигналов;
- ID = 60: запрос команд и диагностики от ведущего устройства;
- ID = 61: отклик ведомого устройства на ID 60;
- ID = 62: зарезервирован для связи с изготовителем;
- ID = 63: зарезервирован для будущих расширений протокола.
Из 64 возможных сообщений 32 могут содержать только два байта данных, 16 — четыре байта данных, и остальные 16 — восемь байтов данных.
Последние два разряда в поле идентификации содержат контрольные суммы, защищающие идентификатор от ошибок при передаче и неправильного распределения сообщений.
Поле данных
После передачи ведущим устройством заголовка начинается передача фактических данных. Ведомые устройства по переданному идентификатору определяют, являются ли они адресатами и, при необходимости, отправляют ответ в поле данных.
В один фрейм можно включить несколько сигналов. Здесь у каждого сигнала есть один генератор, т.е. он всегда описывается одним и тем же узлом сети. Во время работы не разрешается сопоставлять сигналу другой генератор, что возможно в других сетях с управлением по времени.
Данные в ответе ведомого устройства защищаются контрольной суммой (CS).
Описательный файл LIN
Конфигурация шины LIN, т.е. спецификация пользователей сети, сигналов и фреймов, выполняется в описательном файле LIN. Спецификация LIN для этой цели имеет подходящий язык конфигурации.
Из описательного файла LIN автоматически генерируется набор кодов на С и файлов заголовков; эти коды и файлы используются для реализации функций ведущего и ведомых устройств в ЭБУ, расположенных на шине. Таким образом, описательный файл LIN служит для конфигурации всей сети LIN. Это общий интерфейс между автопроизводителем и поставщиками ведущих и ведомых устройств.
Составление графика отправки сообщений
Таблица-график в описательном файле LIN определяет порядок и время отправки сообщений. Часто запрашиваемая информация отправляется время от времени. Когда таблица проработана, ведущее устройство снова начинает с первого сообщения. Последовательность обработки можно изменить в зависимости от режима работы (например, активна/неактивна диагностика, включено/ выключено зажигание).
Таким образом, известен фрейм передачи каждого сообщения. Детерминированные характеристики гарантируются тем фактом, что все передачи инициируются ведущим Устройством в случае управления доступом по принципу «ведущий-ведомый».
Управление сетью LIN
Для минимизации тока замкнутой цепи узлы сети LIN можно переводить в спящий режим. Это можно сделать двумя способами. Ведущее устройство передает команду «перейти в спящий режим» зарезервированным идентификатором 60, либо ведомые устройства переходят в спящий режим автоматически, если в течение относительно длительного времени (4 секунды) не было передачи данных по шине. И ведущее, и ведомые устройства могут снова активировать сеть. Для этого необходимо передать сигнал активации. Он состоит из байта данных с номером 128, обозначающим содержание. После перерыва времени бита 4-64 (разграничитель активации) все узлы должны быть инициализированы и способны ответить ведущему устройству.
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле
- Правообладателям
- Политика конфиденциальности
💥 Видео
Управление шаговыми двигателями по LIN шине через AMIS-30623Скачать
CAN шина👏 Как это работаетСкачать
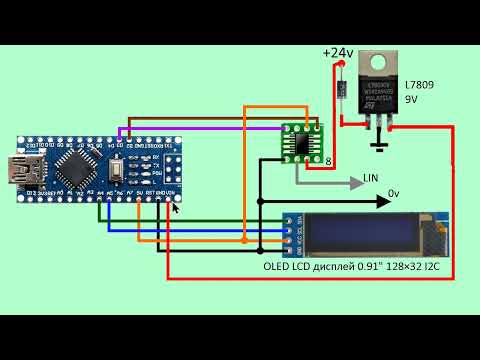
Логический LIN пробник, цифровой тестер лин, к лайн шины автомобиля. На Ардуино, OLED I2C, TJA 1020Скачать
АЗЫ ДИАГНОСТИКИ. Шины передачи данных. Часть 3. Шина LinСкачать
Урок №18. Цифровые интерфейсы современного автомобиля: шины данных CAN и LINСкачать
Lin цифрова шина управління генератором(зарядки) автомобіля Ford Focus.Частина 1Скачать
Для чего служит CAN-шина в сигнализацииСкачать
Шина LINСкачать
Анализатор шины LIN. Обзор обновленной версии. LIN bus analyzer reviewСкачать
лекция 403 CAN шина- введениеСкачать
Шина LIN. Часть 2 Кнопки / LIN bus Master node simulationСкачать