
Чтобы ухаживать за своим транспортным средством, вовремя выявлять неполадки и даже просто подобрать слова и объяснить мастеру, что вас беспокоит, будет не лишним узнать принцип работы электрического самоката в общих чертах.
- Конструкция электросамоката
- Цепной электросамокат
- Самокат с мотор-колесом
- Схема работы электросамоката
- Как работает рекуперация в электросамокате
- Устройство контроллера и АКБ
- Простой самокат с мотором от дворников и редуктором от УШМ
- С ветерком: как разработать электросамокат с помощью компонентов Infineon
- Заключение
Конструкция электросамоката
Выбирая электросамокат, устройство двигателя и аккумулятора нужно понимать лишь в общих чертах. Ведь в случае поломки стоит поручить ремонт профессионалам.
В обычной комплектации электросамокат состоит из таких составных частей:
- Крепкая металлическая рама
- Электродвигатель
- Аккумуляторная батарея
- Дека с платформой для ног
- Руль с ручками и элементами управления: переключение скоростей, ручка тормоза, зажигание
- Два колеса с амортизацией на одном либо обоих для более комфортной езды
- Тормоза — обычно на заднем колесе
Устройство тормоза может быть барабанным, дисковым или клещевым. Самокаты тормозят благодаря приводу на руле с помощью рукоятки.
В отдельных моделях современных самокатов есть и другие опциональные части: бортовой компьютер с дисплеем, сиденье, багажник, измерительные устройства (спидометр, одометр), фары, поворотники, зеркала заднего вида.
На рынке электросамокатов представлены модели с двумя видами привода: цепная передача и мотор-колесо.
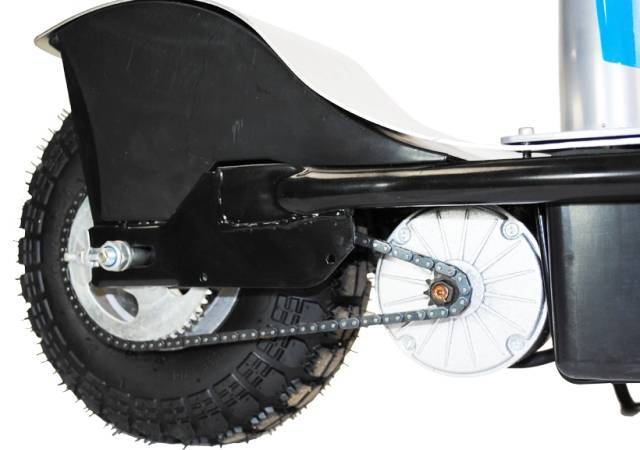
Цепной электросамокат
Электросамокат с цепью является классической конструкцией, где крутящий момент передаётся от электродвигателя на колесо через цепную передачу аналогично устройству работы велосипедов, скутеров, мотоциклов. У цепных самокатов есть два взаимосвязанных преимущества:
- Мощность двигателя
- Способность ездить по бездорожью
Мощный двигатель не требователен к качеству дорожного покрытия, способен преодолеть препятствия как внедорожник. Чтобы защитить мотор и редуктор, их помещают в герметичный короб рядом с осью.
Мы не рекомендуем рассматривать модели с ременным приводом: хотя это частный вид цепного самоката, такая конструкция ненадёжна и по многим характеристикам проигрывает другим способам устройства.
Самокат с мотор-колесом
Мотор-колесо является современным решением, когда двигатель установлен непосредственно в одном из колёс. Преимущества перед цепным устройством самоката очевидны:
- Отсутствие проблем с цепью — уязвимым звеном конструкции
- Простота в обслуживании
Обычно электросамокат типа «мотор-колесо» имеет меньший вес и актуальный внешний вид, его проще хранить и транспортировать. Недостаток такой конструкции в том, что мотор не может быть мощнее 500 Вт. Такой силы двигателя достаточно для передвижения по ровным дорогам городской среды, а вот для загородных поездок он не предназначен.
Существует 2 типа мотор-колёс:
- Безредукторные имеют надёжно зафиксированные обмотки на оси, магнитное поле которых заставляет двигаться ступицу с постоянными магнитами. Надёжная и неприхотливая в эксплуатации конструкция такого типа даёт самый большой из возможных КПД и мощность. Её недостаток: громоздкость и немалый вес самоката.
- С планетарным редуктором — более лёгкая и компактная альтернатива. Самокат с таким приводом не сталкивается с сопротивлением вращению из-за самоиндукции на скоростях выше 15 км/ч. Правда, надёжность недорогих моделей с таким устройством порой оставляет желать лучшего, если при сборке использовались пластиковые шестерни.
Схема работы электросамоката
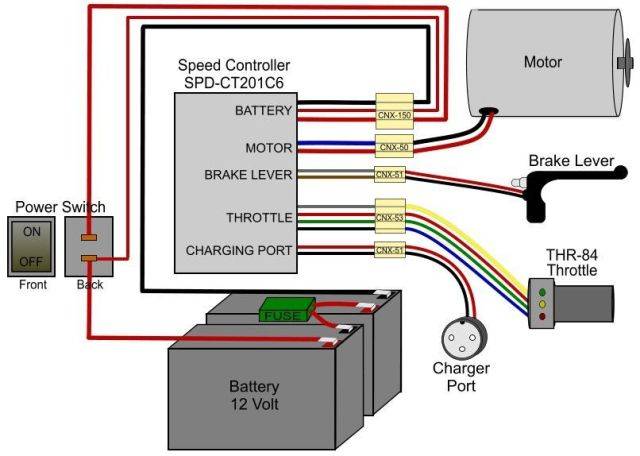
Если вы хотите детально понять, как устроен электросамокат, схема поможет наглядно увидеть подключения и разобраться в нюансах.
Двигатель электрического самоката приводится в действие энергией от аккумуляторной батареи, параметры работы задаются контроллером. В зависимости от внутреннего устройства этого управляющего блока выстраивается режим работы. Электроника «ориентируется» на позицию рукоятки акселератора, данные с датчиков — например, гироскопа.
От мотора момент вращения передаётся на колёса. Современные модели самокатов имеют функцию обратной связи, или рекуперации.
Как работает рекуперация в электросамокате
Рекуперация — свойство частично восстанавливать энергию, которая выделяется при торможении. Вместо того, чтобы кинетическая энергия преобразовывалась в тепло, её превращают в электрический ток и подзаряжают аккумулятор прямо во время движения. Это получается когда вы съезжаете с пригорка или едете на буксире у велосипеда, роликовых коньков, другого электросамоката.
Конечно, полностью заряжать аккумулятор рекуперацией — идея далёкая от реальности, иначе вы бы получили вечный двигатель. Но это удобный способ дотянуть до пункта полноценной зарядки и не тащить разряженный самокат в руках.
Устройство контроллера и АКБ
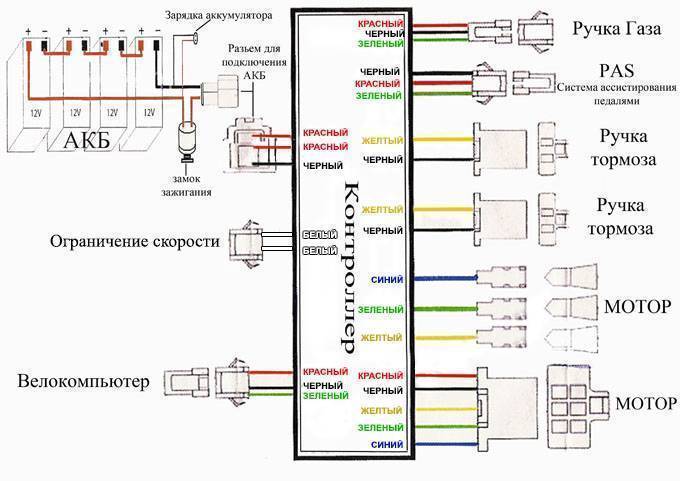
Контроллер как управляющее устройство подключается ко всей электронике в самокате: АКБ, датчикам Холла электродвигателя, замку зажигания, ручкам газа и тормоза, стоп-сигналу и фарам. Работа контроллера питания электросамоката, схема подключения и способы проверки подробно описаны в этой статье.
Аккумулятор обычно располагается снизу под декой. В среднем ёмкости АКБ на одном заряде хватает на 40-60 минут езды, за это время можно преодолеть около 30 км. Именно батарея добавляет основной вес электросамокату: средняя масса такого электротранспорта составляет 20 кг.
Чтобы выбрать современный, качественный электросамокат с гарантией, смотрите наш каталог. У нас большой выбор транспорта с электрическим двигателем для взрослых и подростков.
Простой самокат с мотором от дворников и редуктором от УШМ

Материалы и инструменты, которые использовал автор:
Список материалов:
— моторчик от дворников;
— редуктор от болгарки;
— профильные трубы;
— колесики;
— листовая сталь;
— болты, гайки, трубочки;
— кругляк для токарных работ.
Процесс изготовления самоделки:
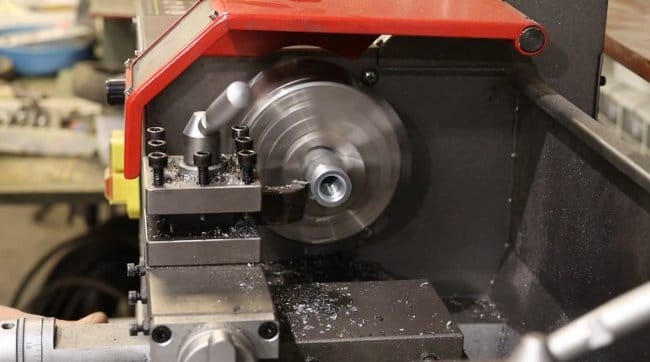
Шаг первый. Доработка редуктора
Разбираем ненужную болгарку и вынимаем якорь. Нужно разобрать якорь при необходимости и отрезать кусок оси. Далее нужно состыковать эту ось с осью моторчика. Для решения задачи автор на токарном станке расточил в оси отверстие под ось мотора.
Также сверлим отверстие под штифт, он и будет цепляться за вилку оси моторчика.
В завершении доработанный редуктор можно собрать.















Шаг второй. Крепим редуктор к мотору
Оси у нас готовы для стыковки, осталось прикрутить редуктор к мотору. К моторчику автор прикрутил стальную пластину, а уже к этой пластине при помощи винтов и гаек прикручивается редуктор болгарки. Как итог, получаем отличный мощный редукторный мотор на 12В, правда, с невысокими оборотами на выходе.
Подключаем провода и пробуем включить моторчик, вал вращается, все отлично.









Шаг третий. Ведущее колесо
Берем колесо от тележки и вытачиваем под отверстие гайку. В эту гайку будет заворачиваться вал болгарки, как итог, у нас получается готовая ведущая ось.
Второе заднее колесо ведомое, оно вращается на подшипниках, автор выточил под него соответствующую ось.


















Шаг пятый. Аккумулятор и испытания
В качестве источника питания автор хотел использовать два аккумулятора от шуруповертов, но они оказались разряженными и на них самокат не поехал. Для увеличения емкости автор спаял аккумуляторы параллельно.
Испытания самоделки автор отлично провел на автомобильном аккумуляторе.
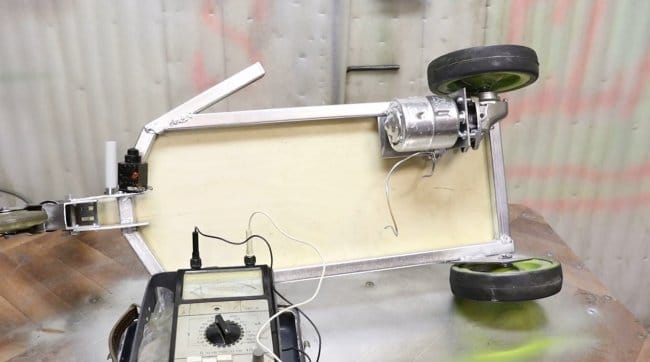






В качестве днища прикручиваем лист фанеры, ну а управление мотором происходит при помощи кнопки, на которую можно нажимать ногой. Самоделка ездит не быстро и останавливается довольно быстро при отключении питания, так что тормоза тут и не нужны. Ну что ж, ребенок доволен, самокат хоть и не быстро, но уже ездит на электричестве.
На этом проект завершен, надеюсь, вам самоделка понравилась, и вы нашли для себя полезные мысли. Удачи и творческих вдохновений, если решите повторить подобное. Не забывайте делиться с нами своими идеями и самоделками!
С ветерком: как разработать электросамокат с помощью компонентов Infineon


Обычный самокат делает электросамокатом наличие электромотора. Массовым изделием его делает бесколлекторный электродвигатель, встроенный в колесо. А управлять этим электродвигателем без особых проблем помогает 300W Motor Control Application Kit – демонстрационный набор контроллера вентильного двигателя, разработанный компанией Infineon на базе компонентов собственного производства.
В XXI веке многие вещи переживают второе рождение, и, получив приставки «смарт-» или «электро-», становятся порой совершенно неузнаваемыми. Этот процесс не оставил в стороне и самокаты. В свое время за ними закрепилась репутация веселой забавы для детей. Но развитие современных технологий, в первую очередь – микроконтроллеров и силовой преобразовательной техники, – позволило оснастить самокат электродвигателем и аккумулятором. И, неожиданно для всех, его электрическая версия превратилась из игрушки в полноценное и удобное транспортное средство.
Читайте также: Регулировка холостого хода лодочного мотора хонда
Основными достоинствами самоката является простота и компактность. До недавнего времени среди индивидуальных средств передвижения меньше и легче были только скейтборды и роликовые коньки, а за последнее десятилетие к этому списку добавились сегвеи, гироскутеры и моноколеса. Однако в отличие от своих более компактных, но неустойчивых и травмоопасных конкурентов самокат намного проще, удобней, безопасней в эксплуатации, и не требует особых навыков для езды. Платформа самоката расположена на расстоянии всего нескольких сантиметров от земли, особо не ограничена по размерам и не зажата с боковых сторон, что позволяет изящно и совершенно безопасно кататься, в том числе – в платье. Наличие жесткого руля, предоставляющего дополнительную точку опоры, и возможность увеличения числа колес повышает устойчивость во время езды и значительно уменьшает риск получить травму, например, при наезде на препятствие.
Основным недостатком обычного самоката является способ привода. Необходимость постоянно отталкиваться ногой требует гораздо больше усилий для езды по сравнению, например, с велосипедом и совершенно не предусматривает возможность длительного отдыха без остановки движения. Именно по этой причине самокаты в свое время не нашли широкого распространения, особенно у взрослых. После установки электродвигателя этот недостаток был устранен, и теперь электросамокат позволяет комфортно ездить как стоя, так и сидя, и по своей функциональности вплотную приближается к велосипедам, скутерам и мопедам.
Сегодня электросамокат претендует на роль полноценного транспортного средства, которое может использоваться для передвижения по улицам и пересеченной местности, внутри зданий, по территориям предприятий, для загородных прогулок, а также для фитнеса: ведь никто не запрещает кататься на самокате по-старинке, отталкиваясь ногой. Компактность и малый вес, особенно в случае моделей со складывающейся рамой, позволяет без проблем перевозить самокат в багажнике автомобиля или общественном транспорте, а также переносить через участки, по которым невозможно проехать. Простота использования и безопасность позволяют ездить на электросамокатах людям любого пола и возраста, в том числе – и с ограниченными возможностями. И, добавив в этот перечень все известные преимущества электротранспорта, в числе которых экономичность, экологичность, бесшумность, малая стоимость зарядки, получим, что электросамокат является перспективным вариантом решения экологических и транспортных проблем современных городов.
Неудивительно, что число компаний, выпускающих электросамокаты и комплектующие к ним, с каждым годом становится все больше, а в разновидностях и модификациях этих транспортных средств сегодня может запутаться даже опытный дистрибьютор. В продаже имеются яркие детские модели для гонок во дворе, взрослые версии для ежедневных поездок, самокаты, на которых можно ездить стоя и/или сидя, а также стильные модели, способные в качестве корпоративного транспортного средства создать имидж любой компании. Не остаются в стороне и изобретатели, постоянно экспериментирующие с дизайном, возможностями и техническим оснащением самоката.
Центральной несущей конструкцией электросамоката является рама. Именно она определяет основное назначение и дизайн машины. Каков максимальный вес водителя, сколько колес и какого диаметра будет установлено, предусмотрено ли сиденье или можно будет ехать только стоя, в каких пределах регулируется высота руля, какова ширина платформы, нужны ли амортизаторы – вот далеко не полный перечень вопросов, от которых зависит конструкция рамы. Систематизация возможных вариантов рам электросамокатов может стать серьезной задачей, поскольку их действительно много (рисунок 1), а пока каждый производитель предлагает решения на основе собственных представлений о прочности, безопасности, функциональности, эргономичности и эстетичности.

Рис. 1. Варианты электросамокатов
Контроль и управление самокатом осуществляются с помощью пульта, расположенного на руле. Варианты дизайна этого узла могут быть самыми различными (рисунок 2) и во многом определяются составом оборудования на борту. Обычно на пульте расположены кнопки или рычаги включения питания, фар, режимов работы, скорости движения, а на жидкокристаллическом или светодиодном дисплее, который может быть и сенсорным, отображается уровень заряда, скорость, количество пройденных километров и другая необходимая информация. В некоторых моделях самокатов дисплей может отсутствовать, а минимально необходимая индикация осуществляется с помощью светодиодных индикаторов. Современные самокаты также могут интегрироваться с информационными устройствами, например, со смартфонами или с системой «Умный дом», по одному из распространенных беспроводных интерфейсов, например, Bluetooth. При этом смартфон может выполнять одновременно функции дисплея и пульта управления самокатом.

Рис. 2. Дисплеи и пульты управления
Для езды в темное время суток самокат может быть оборудован светоотражателями, фарами, стоп-сигналом, указателями поворота и подсветкой дисплея. Обычно для экономии заряда аккумулятора световое оборудование изготовляется на основе светодиодов, имеющих наибольшую световую эффективность и сберегающих заряд аккумулятора. Количество возможных вариантов решений светотехнического оборудования для самоката также огромно и фактически ограничено лишь фантазией и возможностями производителя (рисунок 3).

Рис. 3. Светотехническое оборудование
Безопасная езда невозможна без тормозов. В электросамокатах, как и в любом другом виде электротранспорта, может быть как минимум два вида тормозов, управляемых с помощью рычага или педали: механический и электродинамический. Обычно при легком нажатии на рычаг/педаль первым включается электротормоз: контроллер двигателя переводится в режим рекуперации, превращая двигатель в генератор, начинающий заряжать аккумулятор, останавливая самокат. По мере уменьшения скорости эффективность электротормоза снижается, и дальнейшая остановка уже производится механическим тормозом, срабатывающим при более сильном нажатии на ручку/педаль.
В электросамокатах могут использоваться те же виды механических тормозов, что в велосипедах, мопедах и мотоциклах, например, колодочные или дисковые (рисунок 4a). В недорогих детских моделях самокатов механический тормоз как отдельный узел может отсутствовать, а его функцию может выполнять заднее крыло (рисунок 4б), блокирующее колесо при нажатии на него ногой.

Рис. 4. Дисковый тормоз (а) и заднее крыло самоката, выполняющее функцию тормоза (б)
Но самым важным элементом самоката является привод, тип и мощность которого во многом определяются его целевым назначением. На сегодняшний день в электросамокатах обычно используют два вида привода: с использованием цепной передачи и мотор-колесо.
В велосипедах, мопедах и мотоциклах активно используется классический способ передачи механической энергии с помощью цепи (рисунок 5). Особенностью данного решения является то, что размеры двигателя, а следовательно – и его мощность, теоретически ничем не ограничены. На основе цепной передачи можно создавать скоростные самокаты, предназначенные для дальних поездок, или мощные – для перевозки грузов. Кроме этого, использование цепной передачи по сравнению с мотор-колесом является более сложным, громоздким и менее надежным решением, поэтому его обычно применяют в дорогих моделях самокатов.

Рис. 5. Электросамокаты с цепным приводом: а) Velocifero Mad Truck с 2-киловаттным двигателем; б) TANKO F8 с двигателем мощностью 250 Вт
Мотор-колесо является эффективным конструктивным решением, объединяющем в одном узле электродвигатель и колесо. Это делает самокат простым, компактным и легким, а отсутствие промежуточных звеньев передачи механической энергии увеличивает надежность и КПД, уменьшает сложность эксплуатации и уровень шума, а также позволяет легко создавать модели с передним, задним и даже с полным приводом (рисунок 6). Существует два основных вида мотор-колес: безредукторные (Direct Drive) и с использованием редуктора.
Читайте также: Лада ларгус мотор 106 л 2021

Рис. 6. Полноприводные электросамокаты: а) Volt dual pro 2620 с двигателями мощностью 350 Вт; б) Red Dragon Dual drive с 1-киловаттными двигателями
При использовании безредукторного мотор-колеса (Direct Drive, рисунок 7а) неподвижно закрепленные на оси обмотки создают магнитное поле, приводящее в движение ступицу с постоянными магнитами. Такая конструкция обеспечивает максимальный КПД и мощность, повышает надежность и упрощает эксплуатацию. Самокаты с таким типом двигателя способны развивать максимальную скорость, однако при этом они более тяжелые и громоздкие, чем их редукторные аналоги.
Для неспешных поездок идеальным вариантом является мотор-колесо с планетарным редуктором (рисунок 7б), использование которого позволяет создавать самые легкие и компактные самокаты, предназначенные для эксплуатации в городских условиях. Кроме этого, в отличие от безредукторного варианта, такой привод не создает сопротивления вращению, возникающему из-за самоиндукции при скоростях выше 15 км/ч. Недостатками редуктора являются большая сложность и меньшая надежность, особенно в дешевых моделях с пластиковыми шестернями.

Рис. 7. Конструкция мотор-колеса: а) без редуктора (Direct Drive); б) с планетарным редуктором
Для создания большинства самокатов обычно используют привод мощностью до 300 Вт. Для управления ими не требуется водительских прав. Такая мощность вполне достаточна для детских, подростковых, прогулочных и компактных моделей, предназначенных для повседневного использования на хорошем покрытии без крутых подъемов и спусков. Для скоростных самокатов, способных ездить по сложным дорогам, мощность привода увеличивают до 500 Вт, а для специализированных моделей, предназначенных для дальних поездок, перевозки грузов или требующих повышенной проходимости мощность привода может составлять несколько киловатт и выше.
Преобразование электрической энергии в механическую в электросамокатах, как и в любом другом электротранспорте, осуществляется с помощью электродвигателей, в качестве которых могут использоваться как коллекторные, так и бесколлекторные решения.
Коллекторные двигатели (рисунок 8а) имеют простую конструкцию и не требуют сложных схем управления. За более чем 150-летнюю историю их использования они хорошо изучены, а технология их изготовления достаточно освоена. Коллекторный двигатель может быть изготовлен без использования постоянных магнитов и работать как на постоянном, так и на переменном токе, а его масса и габариты меньше и легче, чем у двигателей других типов такой же мощности. Единственным недостатком коллекторного двигателя является наличие собственно коллектора, ведь механические контакты создают высокий уровень шума и электромагнитные помехи, а также имеют ограниченный срок службы и требуют периодического ухода.
Вентильные (бесколлекторные, безщеточные, Brushless Direct Current Motor, BLDC) двигатели постоянного тока (рисунок 8б) не содержат механических контактов, но при этом и не являются полноценными электрическими машинами. Для создания вращающегося магнитного поля в вентильных двигателях требуется внешний контроллер (коммутатор), особым образом формирующий ток в неподвижных обмотках статора на основании текущего положения ротора. Для работы вентильного двигателя требуются как минимум две обмотки, однако наилучшие характеристики, в том числе – и равномерность передачи мощности на валу, обеспечивают решения с числом обмоток, кратным трем.

Рис. 8. Конструкция коллекторного (а) и бесколлекторного (б) двигателей со встроенными редукторами
Технические характеристики вентильного двигателя сопоставимы с аналогичными характеристиками коллекторного, но из-за сложности управления он долгое время не находил широкого распространения. Сегодня, благодаря достижениям силовой электроники, появились компактные и мощные инверторы на основе MOSFET и IGBT, а развитие микропроцессорной техники позволило формировать сигналы управления транзисторами инвертора программным способом с помощью микроконтроллеров.
Таким образом, недостатки вентильных двигателей были превращены в достоинства, поскольку перенос фокуса разработки в область программирования позволил управлять вентильным двигателем с гибкостью, недостижимой при использовании его коллекторного аналога. С каждым годом надежные и бесшумные вентильные двигатели находят все большее применение в технике, постепенно вытесняя коллекторные электрические машины. Сегодня в ассортименте продукции многих производителей электронных компонентов присутствуют как частично (силовые мосты, комплекты драйверов, специализированные контроллеры и так далее), так и полностью интегрированные решения, в которых либо на кристалле, либо на плате присутствуют все элементы, необходимые для создания аппаратной части контроллера вентильного двигателя.
Примером такого решения, предлагаемым компанией Infineon, – одним из ведущих мировых производителей электронных компонентов, – является демонстрационный набор 300W Motor Control Application Kit, позволяющий за минимальное время разработать программную часть контроллера привода электросамоката мощностью до 300 Вт.
В состав набора входит отладочная плата (рисунок 9), содержащая всю необходимую электронику для подключения вентильного двигателя, адаптер USB/UART, необходимый для подключения платы к персональному компьютеру, и USB-накопитель, на котором находится среда разработки программного обеспечения и необходимый комплект технической документации.

Рис. 9. Отладочная плата контроллера вентильного двигателя мощностью до 300 Вт
Отладочная плата содержит DC/DC-преобразователь (рисунок 10), формирующий два стабилизированных напряжения: +12 В, необходимое для работы драйверов MOSFET, и +5 В – для работы процессора. Обмотки двигателя подключаются к двухуровневому трехфазному инвертору, собранному на 100-амперных силовых OptiMOS™ MOSFET BSC01606NS с максимальным сопротивлением канала 1,6 мОм. Управление транзисторами инвертора осуществляется с помощью специализированного трехфазного полумостового драйвера 6ED003L02 с интегрированными функциями защиты от короткого замыкания и сигнализацией в случае обнаружения аварии.

Рис. 10. Структурная схема отладочной платы
Плата рассчитана на управление вентильным двигателем, позиция ротора которого определяется с помощью трех датчиков Холла с дискретным выходом. Кроме этого на плате предусмотрена возможность подключения датчика температуры, регулятора скорости, а также три дискретных входа и два дискретных выхода с программируемыми функциями.
Формирование сигналов управления инверторов осуществляется 8-разрядным микроконтроллером XC836M2FRI, который поставляется с предустановленной прошивкой с уже реализованными специализированными функциями для управления вентильным двигателем, в числе которых:
- программный модуль коммутации обмоток двигателя с контролем напряжения, тока и скорости;
- автоматический алгоритм определения последовательности датчиков Холла на валу двигателя;
- разблокирование процессора для программирования по последовательному интерфейсу;
- контроль изменения и сохранение параметров работы в энергонезависимой памяти процессора;
- включение/отключение мониторинга цифровых входов управления двигателем.
Программирование микроконтроллера и управление им осуществляется по интерфейсу UART с помощью среды разработки с графическим интерфейсом IBC-GUI (рисунок 11) – специализированного программного обеспечения, разработанного компанией Infineon для управления демонстрационными платами и отображения справочной информации. Программное обеспечение содержит все необходимые инструменты для настройки, управления и мониторинга отладочной платы:

Рис. 11. Программное обеспечение для управления демонстрационными платами Infineon Board Control Graphical User Interface (IBC-GUI)
- отображение и выбор режимов работы двигателя;
- чтение и запись флагов состояния микропроцессора;
- мониторинг в реальном времени напряжения, тока, частоты вращения и прочих параметров работы электродвигателя;
- изменение и сохранения настроек (частота работы инвертора, длительность мертвого времени и так далее) как в файле настроек на компьютере, так и в энергонезависимой памяти процессора;
- выбор одного из двух режимов работы процессора: нормального или режима программирования.
Силовая часть трехфазного двухуровневого инвертора (рисунок 12) рассчитана на длительное управление вентильным двигателем мощностью до 300 Вт. Использование в каждом плече двух параллельно соединенных MOSFET с малым сопротивлением канала позволяет обойтись без теплоотводов и принудительного охлаждения. В схеме инвертора предусмотрен токоизмерительный резистор, предназначенный для измерения общего тока, потребляемого двигателем, и защиты инвертора от перегрузки по току.
Читайте также: Лодочные моторы названия фирм

Рис. 12. Двухуровневый трехфазный инвертор
Максимально допустимое значение тока каждого плеча составляет 200 А, что позволяет подключать к плате двигатель мощностью более 300 Вт, однако при этом необходимо принимать меры для защиты силовых транзисторов от перегрева, например, с помощью радиаторов или принудительного обдува.
Управление транзисторами осуществляется с помощью специализированной микросхемы драйвера 6ED003L02 (рисунок 13), входящей в состав семейства EiceDRIVER™ компании Infineon. Микросхема 6ED003L02 изготовлена по технологии SOI («кремний-на-изоляторе») и предназначена для управления IGBT или MOSFET в трехфазных инверторах с напряжением до 200 В. Особенность технологии SOI заключается в отсутствии паразитных тиристорных структур, поэтому драйвер устойчив к импульсному напряжению отрицательной полярности и защищен от эффекта защелкивания во всем диапазоне рабочих температур и питающих напряжений.

Рис. 13. Схема драйвера 6ED003L02, подключенного к микроконтроллеру XC836M
Основными особенностями 6ED003L02 являются:
- устойчивость к импульсам отрицательной полярности величиной до -50 В;
- контроль сигналов управления для предотвращения сквозных токов и кросс-проводимости;
- защита от перегрузки по току;
- блокировка при низком напряжении питания;
- отключение всех транзисторов при обнаружении ошибки в сигналах управления;
- программируемый перезапуск при перегрузке по току.
Управление всеми узлами платы осуществляется микроконтроллером XC836M (рисунок 13), входящим в состав младшего семейства 8-разрядных микроконтроллеров XC800 производства компании Infineon. Высокая тактовая частота, достигающая 48 МГц, многоканальный 10-разрядный АЦП и математический сопроцессор с модулем умножения/деления значительно повышают производительность процессора и позволяют создавать на его основе эффективные интеллектуальные решения для недорогих систем управления двигателями.
Демонстрационный набор прост в использовании. Чтобы получить первый результат, нужно сделать всего три шага: подключить отладочную плату, установить и запустить на персональном компьютере программу IBC-GUI и запустить двигатель. Для этого к отладочной плате должен быть подключен источник питания постоянного тока, три провода необходимого сечения от обмоток двигателя, 5-проводный шлейф для датчиков Холла (+5 В, общ., датчик 1…3) и кабель для обмена данными с персональным компьютером по интерфейсу UART. Дополнительно к двум цифровым входам платы могут быть подключены тумблеры или кнопки для включения/выключения двигателя и изменения направления его вращения. После подачи питания на плату микроконтроллер начинает формировать через порт UART сообщения, для обработки которых должно быть запущено IBC-GUI, а плата должна быть подключена компьютеру.
Отладочная плата компании Infineon рассчитана на работу от источника питания с напряжением 18…24 В, что, с одной стороны, вполне достаточно для питания двигателя мощностью до 300 Вт, а с другой – предоставляет разработчику возможность выбора типа и напряжения аккумуляторной батареи, которая, вместе с приводом и контроллером, входит в состав электромеханической части электросамоката и является одной из его самых важных частей.
Емкость аккумуляторной батареи во многом определяет запас хода, массу и стоимость самоката. Поскольку эти параметры взаимозависимы, то выбор аккумулятора всегда будет компромиссным решением. Из всего многообразия в электротранспорте используют обычно свинцово-кислотные и литий-ионные аккумуляторы (таблица 1), поскольку никель-кадмиевые и никель-металл-гидридные из-за худших технических и эксплуатационных характеристик постепенно выходят из употребления.
Таблица 1. Сравнение различных типов аккумуляторов
| Тип аккумулятора | Свинцово-кислотные | Литий-ионные | ||
|---|---|---|---|---|
| Кобальтат лития | Литий-марганцевая шпинель | Литий-феррофосфат | ||
| Удельная плотность, Вт∙ч/кг | 30…50 | 150…190 | 100…135 | 90…120 |
| Количество циклов «заряд/разряд» | 200…300 | 500…1000 | 500…1000 | 1000…7000 |
| Время быстрой зарядки, ч | 8…10 | 2…4 | ≤ 1 | ≤ 1 |
| Напряжение на элементе, В | 2 | 3,6 | 3,8 | 3,2 |
| Максимальный пиковый ток (С – емкость аккумулятора) | 5С | 3С | 30С | 30С |
| Температура, при которой возможен заряд, °С | -20…50 | 0…45 | 0…45 | 0…45 |
| Температура, при которой возможен разряд, °С | -20…50 | -20…60 | -20…60 | -20…60 |
| Требования к безопасности | Стабильны во всем диапазоне температур | Необходимы узлы защиты от перегрева | Необходимы узлы защиты от перегрева | Необходимы узлы защиты от перегрева |
Самыми бюджетными являются свинцово-кислотные аккумуляторы, однако они же имеют и наименьшую удельную емкость. Если самокат предназначен для дальних поездок, должен развивать высокую скорость, и вообще по своему назначению больше приближается к велосипедам и мопедам, то увеличение веса при одновременном снижении стоимости может быть допустимым. Отличительной особенностью свинцово-кислотных аккумуляторов является возможность работы при отрицательных температурах, однако большая длительность зарядки и малый срок службы могут свести на нет всю экономию.
Более высокие характеристики имеют литий-ионные аккумуляторы, из которых самыми легкими, но одновременно самыми дорогими, являются ячейки с катодом, изготовленным из кобальтата лития (LiCoO2), а самыми мощными – с катодом из марганцевой шпинели (LiMn2O4). Основными недостатками литиевых аккумуляторов является высокая цена, использование токсичных материалов и пожароопасность, приводящая к необходимости использования дополнительных контроллеров.
Среди производителей литиевых аккумуляторных ячеек можно выделить компании EEMB и Better Power (BPI).
Аккумуляторы обоих производителей имеют огромное количество возможных типоразмеров и являются безопасными – не взрываются и не горят даже при коротком замыкании и механическом повреждении. А наличие низкотемпературных серий позволяет получать энергию при морозах до -40°С. Доступны ячейки с различной емкостью, что позволяет создавать сборки различного напряжения (при последовательном соединении ячеек) и емкости (при параллельном соединении ячеек).
Важно понимать, какой ток будет потреблять двигатель вашего электросамоката. Обычные литий-полимерные аккумуляторы могут разряжаться током величины, не превышающей две емкости (2С), а заряжаться – током величины не более одной емкости (1С). Существуют и высокотоковые серии, они обычно дороже, например, BPI выпускает стандартную ячейку PL7261110-7000 емкостью 7000 мА.
Ячейка имеет напряжение 3,6 В, то есть сборка из 18 ячеек (три соединенных параллельно группы по 6 ячеек, соединенных последовательно) будет иметь напряжение 21,6 В и емкость 21 А, что вполне достаточно, чтобы обеспечить двигатель 300 Вт энергией в течение около 3 часов. Количество циклов заряда/разряда такой сборки может достигать 800. Причем ее размер совсем небольшой – 13х7х11 см.
В последнее время все большую популярность набирают аккумуляторы с литий-феррофосфатным катодом (LiFePO4). Обладающие удельной плотностью на 14% меньше, чем у других типов литиевых аккумуляторов, они имеют как минимум в два раза больший срок службы, экологически чище и дешевле других видов ячеек. Особенностью литий-феррофосфатных аккумуляторов является стабильное напряжение, равное 3,2 В, что дает возможность использовать четыре последовательно соединенных элемента с общим напряжением 12,8 В вместо шести свинцово-кислотных ячеек. Все это позволяет позиционировать их в качестве основного вида аккумуляторов, который в будущем будет использоваться в электротранспорте.
Заключение
Большинство узлов электросамоката не является новыми или уникальными для транспортных средств. Богатый опыт, накопленный при производстве автомобилей, мотоциклов, мопедов и, наконец, велосипедов позволяет создавать раму, фары, колеса, сидения и другие элементы практически любых размеров, форм и цветов. Сегодня при проектировании конструктивных элементов самоката больше нужен дизайнер, чем инженер, скромно переводящий дизайнерские идеи на язык, понятный роботам производственной линии.
Однако электромеханическая часть самоката все еще оказывается сложной и требует творческого подхода. Тем не менее, уже сегодня поставщики электронных компонентов предоставляют богатый выбор готовых решений, позволяющих значительно сократить время на разработку как электросамокатов, так и других видов электрического транспорта.
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала







