


При подборе шагового двигателя для ЧПУ необходимо отталкиваться от планируемой сферы применения станка и технических характеристик. Ниже представлены критерии выбора, классификация наиболее популярных двигателей и примеры расчета.
- Как выбрать шаговый двигатель для ЧПУ: критерии
- Тип двигателя
- Примеры расчетов шаговых двигателей для ЧПУ
- Определяем силы, действующие в системе
- Рассчитываем мощность
- Рассчитываем редукцию оборотов
- Классификация шаговых двигателей для ЧПУ
- Советские модели
- Китайские модели
- Биполярные шаговые двигатели для ЧПУ от CNC Technology
- 3 причины купить шаговый двигатель для ЧПУ в компании CNC Technology
- Шаговые двигатели и аксессуары
- Шаговые двигатели для портальных станков с ЧПУ
- Преимущества ШД
- Выбор ШД
- cnc-club.ru
- Помогите подобрать шаг ШВП и двигатель
- Помогите подобрать шаг ШВП и двигатель
- Часто задаваемые вопросы по шаговым двигателям (FAQ)
- Вопрос: Что такое шаговый двигатель и для чего он?
- Вопрос: Какие достоинства у шаговых двигателей?
- Вопрос: Какие бывают шаговые двигатели?
- Вопрос: Корпус у меня не разборный, а хочется посмотреть что внутри!
- Вопрос: На какой минимальный угол может повернуться шаговый двигатель?
- Вопрос: Какие существуют программы для работы с шаговыми двигателями?
- Вопрос: Как можно повысить точность вращения вала шагового двигателя?
- Вопрос: Что означают характеристики шагового двигателя — ток, индуктивность, напряжение и т.п.?
- Вопрос: Какой шаговый двигатель лучше, А или Б?
- Вопрос: Что такое драйвер управления шаговым двигателем?
- Вопрос: Как узнать, подходит ли двигатель А к драйверу Б
- Вопрос: У меня перегревается двигатель, что делать?
- Вопрос: Шаговый двигатель постоянно пропускает шаги. Что делать?
- 🎥 Видео
Видео:Шаговый двигатель, шестерня, зубчатая рейкаСкачать
Как выбрать шаговый двигатель для ЧПУ: критерии
- Индуктивность. Следует вычислить квадратный корень из индуктивности обмотки и умножить его на 32. Полученное значение нужно сравнить с напряжением источника питания для драйвера. Различия между этими числами не должны сильно отличаться. Если напряжение питания на 30% и более превышает полученное значение, то мотор будет греться и шуметь. Если меньше, то крутящий момент будет слишком быстро убывать со скоростью. Большая индуктивность потенциально обеспечит возможность для большего крутящего момента. Однако для этого потребуется драйвер с большим напряжением питания.
- График зависимости крутящего момента от скорости. Позволяет определить, удовлетворяет ли выбранный двигатель условиям в техническом задании.
- Геометрические параметры. Имеет значение длина двигателя, фланец и диаметр вала.
Тип двигателя
Важный критерий – тип шагового двигателя для ЧПУ станка. Широко распространены биполярные, униполярные и трехфазные модели. Каждая из них имеет свои особенности:
- биполярные чаще всего используют для ЧПУ благодаря простому подбору нового драйвера при выходе старого из строя, высокому удельному сопротивлению на малых оборотах;
- трехфазные отличаются большей скоростью, чем биполярные аналогичного размера. Подходят для случаев, когда требуется высокая скорость вращения;
- униполярные представляют собой несколько видов биполярных двигателей в зависимости от подключения обмоток.
Видео:Обзор шаговых двигателей и серводвигателей для станковСкачать

Примеры расчетов шаговых двигателей для ЧПУ
Определяем силы, действующие в системе
Необходимо определить силу трения в направляющих, которая зависит от используемых материалов. Для примера коэффициент трения составляет 0.2, вес детали – 300 кгс, вес стола – 100 кгс, необходимое ускорение – 2 м/с 2 , сила резания – 3 000 Н.
- Чтобы рассчитать силу трения нужно умножить коэффициент трения на вес движущейся системы. Для примера: 0.2 x 9.81 (100 кгс+300 кгс). Получается 785 Н.
- Чтобы рассчитать силу инерции надо умножить массу стола с деталью на требуемое ускорение. Для примера: 400 x 2 = 800 Н.
- Чтобы рассчитать полную силу сопротивления надо сложить силы трения, инерции и резания. Для примера: 785 + 800 + 3 000. Получается 4 585 Н.
Рассчитываем мощность
Формулы, приведенные ниже, представлены без учета инерции вала самого шагового двигателя и других вращающихся механизмов. Поэтому для большей точности рекомендуется увеличить или убавить требования по ускорению на 10%.
Для расчета мощности шагового двигателя следует воспользоваться формулой F=ma, где:
- F – сила в ньютонах, необходимая для того, чтобы привести тело в движение;
- m – масса тела в кг;
- а – необходимое ускорение m/c 2 .
Для определения механической мощности необходимо умножить силу сопротивления движения на скорость.
Рассчитываем редукцию оборотов
Определяется на основании номинальных оборотов сервопривода и максимальной скорости перемещения стола. Например, скорость перемещения составляет 1 000 мм/мин, шаг винта шариковой винтовой передачи – 10 мм. Тогда скорость вращения винта ШВП должна быть (1 000 / 10) 100 оборотов в минуту.
Для расчета коэффициента редукции учесть номинальные обороты сервопривода. Например, они равны 5 000 об/мин. Тогда редукция будет равна (5 000 / 100) 50.
Видео:Шарико-винтовая передача (ШВП) для ЧПУ станковСкачать

Классификация шаговых двигателей для ЧПУ
Советские модели
В станках часто применяют шаговые двигатели индукторного типа, изготовленные в СССР. Речь о моделях ДШИ-200-2 и ДШИ-200-3. Они обладают следующими характеристиками:
| Параметр | ДШИ-200-2 | ДШИ-200-3 |
|---|---|---|
| Потребляемая мощность | 11.8 Вт | 16.7 Вт |
| Погрешность обработки шага | 3% | 3% |
| Максимальный статический момент | 0.46 нт | 0.84 нт |
| Максимальная чистота приемистости | 1 000 Гц | 1 000 Гц |
| Напряжение питания | 30 В | 30 В |
| Ток питания в фазе | 1.5 А | 1.5 А |
| Единичный шаг | 1.8 град | 1.8 град |
| Масса | 0.54 кг | 0.91 кг |
При выборе следует обратить внимание на наличие индекса ОС. Это особая серия с военной приемкой. Имеет более высокое качество исполнения, чем обычные модели.
Китайские модели
Примеры китайских шаговых двигателей для ЧПУ и их характеристики представлены ниже.
| Параметр | Модель | ||
|---|---|---|---|
| JKM Nema 17 42mm Hybrid Stepper Motor | JK42HS48-2504 | JK42HS40-1704 | |
| Длина, мм | 48 | 40 | 34 |
| Ток питания в фазе, А | 2.5 | 1.7 | 1.33 |
| Единичный шаг (угловое перемещение), град | 1.8 | 1.8 | 1.8 |
| Масса, кг | 0.34 | 0.32 | 0.22 |
Биполярные шаговые двигатели для ЧПУ от CNC Technology
| Параметр | Модель | ||
|---|---|---|---|
| 86HS156-5004 | 57HS76-3004 | 42HS48-1704A | |
| Ток питания в фазе, А | 5 | 3 | 1.7 |
| Единичный шаг (угловое перемещение), град | 1.8 | 1.8 | 1.8 |
| Индуктивность, мГн | 6 | 3.5 | 2.8 |
| Диаметр вала | 14 | 8 | 5 |
Зная критерии выбора и ориентируясь в предложениях по шаговым двигателям на рынке можно подобрать подходящую модель для станка ЧПУ. Главное – покупать у проверенных поставщиков.
Видео:Линейный шаговый двигатель Nema17 / Non captive stepperСкачать

3 причины купить шаговый двигатель для ЧПУ в компании CNC Technology
- Двигатели от надежных производителей, эти же двигатели мы используем в наших станках.
- Всегда в наличии на складе.
- Комплексность: в нашем каталоге можно подобрать не только ШД, но и драйверы, датчики, соединительные муфты и другие комплектующие.
Получить консультацию по выбору шагового двигателя можно по телефону 8 (800) 350 33 60.
Видео:Демонстрация Мощности Шагового Двигателя NEMA23Скачать

Шаговые двигатели и аксессуары









Видео:4.6 На что способны шаговые двигатели 18.6 кгсмСкачать

Шаговые двигатели для портальных станков с ЧПУ
Шаговый двигатель – электродвигатель, в котором, в отличие от обычного коллекторного, ток подается в обмотки статора по очереди, за счет чего вал ротора фиксируется в заданном положении.
Видео:На что способен NEMA 17. Тест работы шаговых двигателейСкачать

Преимущества ШД
Для перемещения стола и шпинделя используются шаговые двигатели или сервомоторы. ШД дешевле, но стоимость – не единственный плюс. Они характеризуются рядом дополнительных преимуществ, которые при построении портальных станков обуславливают выбор в пользу приводов этого типа:
- легкость настройки. Успех пуска системы с ШД зависит только от правильности его подключения и корректного выбора драйвера. Сервомотор требуется настраивать дополнительно, он сложнее в подключении и в ремонте;
- неприхотливость в эксплуатации. Для бюджетного портального станка после нескольких лет интенсивной работы не исключается вероятность подклинивания механики. Пиковая нагрузка на ШД в такой ситуации приведет только к пропуску шагов и росту рассогласования, проблема решается перезагрузкой станка. Увеличение нагрузки на слабый сервомотор приведет к перегоранию обмоток, на мощный – к механической поломке передачи;
- у ШД способность к удержанию вала в заданном положении выше. Сервомотор при фиксации ротора склонен к микроколебаниям, ротор ШД остается на одной угловой позиции без сдвигов.
Недостатки: резонанс, инертность, повышенный уровень шума. Первая проблема решается выбором драйвера с функцией подавления резонанса. Инертность – естественный недостаток, следующий из принципа работы ШД, но он проявляется только при быстром разгоне. Перед фрезерно-гравировальными станками ставятся другие задачи – например, при нанесении рельефного изображения на каменную плиту на ускоренные перемещения приходится не более 1% времени. Уровень шума – последний параметр, на который обращают внимание в условиях массового производства, здесь важнее стоимость оборудования (а ШД, напомним, дешевле, чем тихие сервомоторы).
Видео:Как подобрать комплект ШВПСкачать

Выбор ШД
Базовые технические характеристики шагового двигателя определяются его типоразмером. ШД одного типоразмера одинаковы по основным показателям (номинальный ток фазы, сопротивление и максимальное напряжение обмоток, крутящий момент). Разница определяется двумя нюансами.
Первый – деление шага. Меньший шаг означает более плавное перемещение, но в этом случае потребуется драйвер с большей входной частотой, а он обойдется дороже. Наиболее распространены ШД с шагом 0.9 и 1.8 градуса – этих значений хватает для решения стандартных задач, ставящихся перед портальными станками.
Второй нюанс – индуктивность обмоток двигателя. Производители выпускают шаговые двигатели одного и того же типоразмера в двух вариантах. Моторы с малой индуктивностью характеризуются более высокой скоростью вращения вала при меньшей потребляемой мощности. Подходят для ненагруженных портальных станков для перемещения стола. Моторы с большой индуктивностью медленнее, но у них выше крутящий момент. Подходят для управления перемещением шпинделя по оси Z и управления четвертой координатой, поскольку лучше удерживают ротор в неподвижном положении.
Шаговый электродвигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги)ротора
Видео:Как собрать гайку ШВП.Скачать

cnc-club.ru
Статьи, обзоры, цены на станки и комплектующие.
Видео:В чем отличие ШВП класса С7 от С5Скачать

Помогите подобрать шаг ШВП и двигатель
Помогите подобрать шаг ШВП и двигатель
Сообщение kamazik85 » 19 апр 2014, 15:45
Уважаемые форумчане, помогите с выбором ШВП и двигателя.
От координатного стола требуется скорость перемещения 300мм/сек и точность позиционирования 0,02мм.
Получается что для обеспечения точности в 0,02мм и использовании шагового двигателя с шагом 1,8 градуса требуется винт ШВП с шагом 4мм на оборот (4мм/200шагов=0,02мм на шаг). Но при использовании этого винта для получения скорости линейного перемещения в 300мм/сек требуется вращать винт со скоростью 4500 об/мин (300мм/4мм=75 об/сек=4500 об/мин). Для того чтоб шаговый двигатель вращался с такой скоросью надо чтоб он был способен принимать15000 шагов в сек (15000Гц). Посмотрел в интернете характеристики шаговых двигателей и самый быстрый который я нашел только на 10000Гц.
1. Может я неверно выбрал шаг ШВП? Возможно что для обеспечения точности в 0,02мм может подойти винт с более большим шагом (при частоте вращения в 1500 об/мин шаг винта может быть составить 12 мм). Но это возможно только при условии что шаг двигателя будет менее 1,8 градуса, я так понял что это достигается делением шага, но можно ли использовать деление шага для позиционирования (планируется использовать двигатель вместе с энкодером).
2. Возможно для заданных параметров точности и скорости невозможно использовать шаговый двигатель, и подойдет только сервопривод? Опять же 4500 об/мин это предельные режимы работы большинства серводвигателей, что ограничивает их выбор (или точность позиционирования сервоприводов выше и значит можно выбрать больший шаг винта ШВП?)
Буду благодарен за любые коментарии и советы по моим вопросам
Видео:Автоматическая поперечная подача для токарного станка. Механика и первый тест.Скачать

Часто задаваемые вопросы по шаговым двигателям (FAQ)
Вопрос: Что такое шаговый двигатель и для чего он?
Ответ: Шаговые двигатели — это устройства, задача которых преобразование электрических импульсов в поворот вала двигателя на определенный угол. В отличие от обычных двигателей, шаговые двигатели имеют особенности, которые определяют их свойства при использовании в специализированных областях: управляя шаговым двигателем с помощью специального устройства (драйвер шагового двигателя), можно поворачивать его вал на строго заданный угол. Это позволяет применять его там, где требуется высокая точность перемещений. Наглядные примеры это принтеры, факсы, копировальные машины, станки с ЧПУ (Числовое программное управление), фрезерные, гравировальные машины, модули линейного перемещения, плоттеры, установщики радиоэлектронных компонентов. Шаговый двигатель является бесколлекторным двигателем постоянного тока. Как и другие бесколлекторные двигатели, шаговый двигатель высоконадежен и при надлежащей эксплуатации имеет длительный срок службы. Далее: подробно о строении шагового двигателя
Вопрос: Какие достоинства у шаговых двигателей?
Ответ: Достоинства истекают из особенностей конструкции: — Шаговый двигатель может обеспечить очень точное перемещение на заданный угол, причем без обратной связи — поворот ротора зависит от числа поданных импульсов на устройство управления; — высокая точность позиционирования и повторяемость, так качественные шаговые двигатели имеют точность не хуже 5% от величины шага, при этом данная ошибка не накапливается; — хорошая надежность двигателя, обусловленная отсутствием щеток, при этом срок службы двигателя ограничивается лишь ресурсом подшипников; — обеспечивает получение сверхнизких скоростей вращения вала без использования редуктора; — работа в широком диапазоне скоростей, т.к. скорость напрямую зависит от количества входных импульсов. Недостатки — шаговый двигатель подвержен резонансу; — может пропустить шаги и реальная позиция вала окажется рассинхронизирована с позицией, заданной в управляющей системе — низкая удельная мощность шагового привода; — потребляемая энергия не уменьшается при отсутствии нагрузки; — малый момент на высоких скоростях;
Вопрос: Какие бывают шаговые двигатели?
Ответ: Шаговых двигателей существует множество разновидностей. В настоящее время 95% всех шаговых двигателей — гибридные. В зависимости от конфигурации обмоток двигатели делятся: а)Биполярный — имеет четыре выхода, содержит в себе две обмотки. б)Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины. в)Четырехобмоточный — имеет четыре независимые обмотки. Можно представлять его как униполярный, обмотки которого разъединены, а если соединить соседние отводы — получим биполярный двигатель.
В зависимости от типа электронного коммутатора управление шаговым двигателем может быть: однополярным или разнополярным; симметричным или несимметричным; ·потенциальным или импульсным. При однополярном управлении напряжение каждой фазе изменяется от 0 до +U, а при разнополярном – от -U до +U. Управление называется симметричным, если в каждом такте коммутации задействуется одинаковое число обмоток, и несимметричным – если разное.
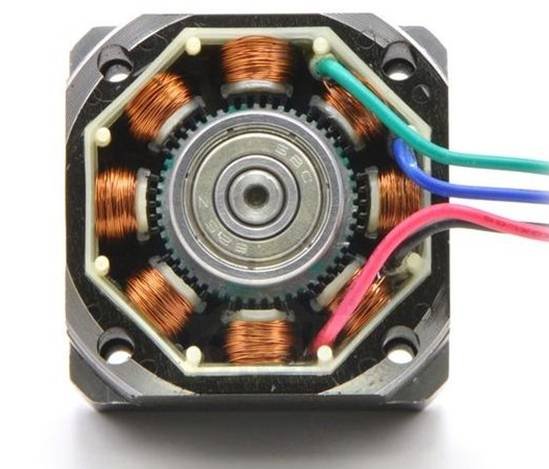
Вопрос: Корпус у меня не разборный, а хочется посмотреть что внутри!
Ответ: Внутри находятся обмотки, зубчатый ротор и несколько подшипников. Не стоит разбирать рабочий двигатель. Ротор устанавливается с малым зазором, кроме того, система ротор-статор образует замкнутый магнитопровод, который намагничивается в собранном состоянии, и двигатель после разборки теряет существенную часть момента.
Вопрос: На какой минимальный угол может повернуться шаговый двигатель?
Ответ: Большинство моделей имеет 200 шагов на оборот, т.е. 1.8 градуса на шаг. Также производятся и можно заказать у нас двигатель с шагом в 0.9 градуса(400 шагов на оборот). Существует также возможность использования микрошагового режима, который позволяет делить шаг без потери точности на 8-10 микрошагов. Это означает, что для двигателя с шагом 0.9 градуса минимальным угла поворота будет примерно 0,09 град = 5.4 угловых минуты. Существуют также драйверы, которые могут делить шаг на 256 и даже 512 микрошагов. Но практическое значение таких делений невелико — во-первых, для совершения каждого микрошага требуется подать отдельный импульс STEP, соответственно, требуется очень высокая частота импульсов, во-вторых, точность перестает расти уже после деления шага на 10-16 частей. Единственным применением таких режимов остается повышение плавности хода двигателя.
Вопрос: Какие существуют программы для работы с шаговыми двигателями?
Ответ: Их существует множетсво как перемещение на определенный шаг, так для трехмерного использования. Могут управлять от одного до шести двигателей. Например MACH3, LinuxCNC, Turbocnc, NC Studio.
Вопрос: Как можно повысить точность вращения вала шагового двигателя?
Ответ: Есть режим дробления шага (микрошаг) реализуется при независимом управлении током обмоток шагового электродвигателя. Управляя соотношением токов в обмотках можно зафиксировать ротор в промежуточном положении между шагами. Таким образом можно повысить плавность вращения ротора и добиться высокой точности позиционирования. Однако, деление шага не всегда приводит к увеличению точности. Погрешность установки вала всегда равна указанному производителем значению (обычно 5% от полного шага), вне зависимости от микрошага. Кроме того, точность установки снижается, если ток в одной из обмоток близок к нулю. В результате точность увеличивает деление шага до примерно 8-10 микрошагов (деление 1/8 или 1/10). Большие значения приводят лишь к увеличению плавности хода.
Вопрос: Что означают характеристики шагового двигателя — ток, индуктивность, напряжение и т.п.?
Ответ: Все характеристики двигателя находятся в тесной взаимосвязи и определяют главную — кривую зависимости крутящего момента от скорости. Рассматривать влияение характеристик надо для двигателей одного размера. Момент удержания — пиковое значение крутящего момента двигателя — зависит от тока и индуктивности обмотки. Чем больше индуктивность, тем больший момент удержания можно развить, но тем больше требуется напряжение питания на высоких скоростях, чтобы преодолеть индуктивное сопротивление и закачать нужный ток в обмотку. Ток обмотки также определяет выбор драйвера шагового двигателя. Напряжение питания обмотки равно U = I*R, номинальному току обмотки умноженному на напряжение и показывает, какое постоянное напряжение надо подать на обмотку, чтобы получить номинальный ток и, соответственно, момент удержания. Величина напряжения используется при выборе драйвера и характеристик источника питания.
Вопрос: Какой шаговый двигатель лучше, А или Б?
Ответ: Этот вопрос неоднозначен, но все же дадим пару рекомендаций. Как правило, ориентироваться надо не на момент удержания, а на индуктивность. Лучше работают те двигатели, у которых индуктивность меньше — большинство задач требуют момента на высоких скоростях, и малая индуктивность требует меньшего напряжения питания. Нормальной индуктивностью можно считать 2-5 мГн для двигателей NEMA23 (фланец 57 мм), 4-6 мГн для двигателей NEMA34 (фланец 86 мм). Если А и Б — двигатели разного размера, смотрите кривую зависимости момента от скорости — чем она более пологая, тем лучше. См. более подробный алгоритм выбора шагового двигателя.
Вопрос: Что такое драйвер управления шаговым двигателем?
Ответ: Драйверы шаговых двигателей используются для управления биполярными и униполярными шаговыми двигателями с полным шагом, половинным и микрошагом. Они действуют как посредники между компьютером и двигателем и должны подбираться по напряжению и уровню мощности, типу сигнала (аналоговый и цифровой). Тип двигателя является самым важным фактором при выборе драйвера. В униполярном или биполярном двигателе ток проходит только в одном направлении по обмотке. Биполярные шаговые двигатели имеют две обмотки через которые ток проходит поочередно. Шаговые двигатели с полным шагом приводятся в движение благодаря изменениям магнитного поля относительно ротора. Полушаговые двигатели в свою очередь действуют также, как двигатели с полным шагом однако угловое перемещение ротора составляет половину шага полношагового двигателя. На каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две. В результате угловое перемещение ротора составляет половину угла. Микрошаговые или минишаговые двигатели отличаются дискретным числом угловых перемещений угловых положений между каждым полным шагом. В драйверах минишаговых и микрошаговых двигателей используются электронные методы улучшения позиционного решения системы управления. Драйверы шаговых двигателей отличаются по электрическим характеристикам, параметрам управления, размерам и техническим характеристикам. Электрические характеристики включают в себя максимальное напряжение на входе, номинальную мощность, силу тока на выходе, максимальная сила тока на выходе, питание переменным и постоянным током. Драйверы для шаговых двигателей могут быть однофазными или трех фазными с частотой в 50, 60, или 400 Гц. Параметры управления включают в себя особенности установки и управления. В некоторых драйверах используются ручные средства управления типа кнопок, DIP-переключателей или потенциометров. В других используются джойстики, цифровые пульты управления, компьютерные интерфейсы, или слоты для карт PCMCIA (Международная ассоциация производителей карт памяти для персональных компьютеров). Программы контроля могут быть сохранены на передвижных, энергонезависимых носителях данных. Переносные блоки управления разработаны для управления с удаленных точек. Также доступно беспроводное и WEB управления. Форма драйверов позволяет сборку модуля в нескольких конфигурациях. Большинство устройств могут монтироваться на шасси, контактные DIN рельсы, панели, стойки, стены или печатные платы (PCB). Также возможна установка автономных устройств и интегральных микросхем, которые монтируются на печатные платы. Особенности драйверов: подавление резонанса; вспомогательные входы/выходы (I/O); мягкий старт; автонастройка, самодиагностика и проверка состояния; а так же сигнализация в таких случаях как перенапряжение. В драйверах используют много различных типов шин и коммуникационных систем. Шинные типы: (ATA), (PCI), (IDE), (ISA), (GPIB), (USB) и (VMEbus). Коммуникационные стандарты: ARCNET, AS-i, Beckhoff I/O, CANbus, CANopen, DeviceNet, Ethernet, (SCSI) и (SDS). Также доступно большое количество последовательных и параллельных интерфейсов. Соответствующая статья поможет подобрать драйвер биполярного двигателя для станка с ЧПУ.
Вопрос: Как узнать, подходит ли двигатель А к драйверу Б
Ответ: Чтобы это узнать, сделайте следующее: 1) проверьте, может ли драйвер выдавать ток фазы, равный(или примерно равный)току, указанному производителем двигателя. Если ток драйвера заметно меньше тока фазы двигателя — драйвер не подходит. 2) Вычислите максимальное напряжение питания двигателя по формуле Umax = 32 * sqrt (L), где L — индуктивность обмоток двигателя в миллигенри(указывается производителем). Желательно, чтобы максимально допустимое напряжение питания драйвера было примерно равно этому значению, или было немного больше. Если это условие не выполняется, то скорее всего двигатель вращаться будет, но больших скоростей достичь не удастся. Пример:подходит ли драйвер PLD545-G3 для двигателя PL86H151? Ток обмотки двигателя — 4.2 А, ток, выдаваемый драйвером — до 5А, первое условия выполнено. Индуктивность двигателя — 12 мГн, по формуле получаем Umax = 32 * sqrt(12) = 110 Вольт. Максимальное напряжение питания драйвера — 45 Вольт. Это означает, что двигатель будет отдавать момент только на низких оборотах, а для получения качественного движения необходимо использовать или драйвер с напряжением питания до 80 Вольт(например, PLD86 или PLD880), или двигатель с меньшей индуктивностью.
Вопрос: У меня перегревается двигатель, что делать?
Ответ: Для начала надо определить, действительно ли двигатель перегревается. Многие воспринимают рабочую температуру двигателя как перегрев, потому что её «не терпит рука», тогда как нагрев в 80 градусов — нормальное явления для шагового двигателя. Поэтому необходимо замерить реальную температуру. Если она меньше 80 градусов — беспокоиться не стоит. Если больше — первое, что необходимо проверить, это выставленный рабочий ток на драйвере. Он должен соответствовать номинальному току двигателя. Также можно использовать функцию снижения тока обмоток в режиме удержания. К снижению нагрева приводит также снижение питающего напряжения, однако, и момент тоже снизится. Если нет возможности жертвовать динамикой двигателя, остается единственный способ — установить на корпус ШД радиатор и/или вентилятор.
Вопрос: Шаговый двигатель постоянно пропускает шаги. Что делать?
Ответ: Пропуск шагов — самая неприятная проблема у шаговых приводов. Причин может быть множество. В порядке убывания распространенности:
- Некачественный блок управления двигателем. Не стоит недооценивать сложность управления шаговым двигателем. Разница в работе драйвера Leadshine и кустарной поделки — очень велика. Особенно это заметно при работе в области резонанса.
- Неверные настройки драйвера. Неверно выбранное напряжение питания, ток — могут приводить к пропуску шагов. Проверьте все настройки еще раз.
- Двигатель перегружен. Нагрузка на двигатель слишком велика. Снизьте скорость или поставьте двигатель побольше.
- Механическая часть(направляющие, передачи) подклинивает
- Бракованный двигатель. Прозвоните обмотки, проверьте их сопротивление(должно совпадать с паспортным). Проверьте вращение вала рукой — при разомкнутых обмотках вал отключенного двигателя должен вращаться легко и беззвучно, при замкнутых накоротко вал крутиться не должен.
- Дребезг на контактах управляющих сигналов STEP/DIR
- Проблемы с генерацией сигналов STEP/DIR. Это целое отдельное семейство проблем, которое достойно отдельного обсуждения.
- Иногда за пропуск шагов принимают проскальзывание шестерни на валу или муфты, соединяющей вал двигателя с винтом передачи
🎥 Видео
Шаговый двигатель для продольной автоподачи фрезерного станка НГФ 110 - вторая часть экспериментаСкачать

Как собрать ШВПСкачать

ШВП: обслуживание и подготовка к работеСкачать

Крепление для шаговых двигателей Часть№7Скачать

ШВП Небольшой нюанс с большими последствиямиСкачать

Шаговые двигатели. Микрошаг и рассчёт расстояния на один шагСкачать

Обзор шаговых двигателей или как подобрать шаговый двигательСкачать

Как выбрать шаговый двигатель? Принцип работы, разновидности.Скачать
