
Сервопривод – это обычный мотор с дополнительно установленным датчиком контроля, выполняющим функцию обратной связи. Шаговый двигатель – это бесщеточный электромотор, работающий в паре плата-драйвер. Сразу скажем, что сервопривод и шаговый двигатель не конкурируют между собой.

- Сервопривод
- Шаговый двигатель
- Сервопривод или шаговый двигатель: какова разница и что выбрать?
- Устройство шагового привода
- Принцип работы шагового двигателя
- Устройство сервопривода
- Принцип действия сервопривода
- Чем отличается сервопривод от шагового двигателя?
- Критерии выбора
- Шаговый мотор как сервопривод
- Каталог продукции
- Дополнительно
- Руководства и инструкции
- Статьи
- Кто на сайте?
- Сравнение шаговых и серводвигателей
- Сегодня существуют три основных типа/вида шаговых двигателей:
- Гибридные шаговые двигатели
- Строение шаговых двигателей
- Принципы работы шагового двигателя
- Механическая характеристика шагового двигателя
- Управление шаговым приводом
- Серводвигатели
- Принципы работы серводвигателя
- Синхронные серводвигатели
- Для сервоприводов характерны такие показатели как:
- Шаговые двигатели или серводвигатели: выбор двигателей для фрезерно-гравировального станка
- Сравнение работы простого Серво и Шагового двигателей:
- Преимущества шагового двигателя:
- Преимущества серводвигателя:
- Выводы:
- В каких случаях необходимы сервоприводы:
Сервопривод
Сервопривод, как мы уже сказали ранее — это обычный мотор с дополнительно установленным датчиком контроля, выполняющим функцию обратной связи.
При работе мотор будет удерживаться в заданном положении с помощью контроллера. Такой принцип взаимосвязи позволяет добиться высокой скорости и точности оборудования вплоть до одного микрона.
Если на обычный электродвигатель подать напряжение, он будет вращаться.
При таком подходе пропуск шагов исключен, так как энкодер постоянно отслеживает отклонения вала и корректирует ошибку, меняя каждый раз направление движения двигателя.
- дорогостоящий ремонт;
- высокая стоимость.

Шаговый двигатель
Шаговый двигатель – это бесщеточный электромотор, работающий в паре плата-драйвер. Как правило, шаговые двигатели имеют несколько фаз (обмоток), поочередно включаемых драйвером. Двигатель поворачивается за счет подачи короткого импульса на одну из обмоток статора, в результате чего в движение приводится магнитный ротор.
Величина физического шага двигателя может варьироваться в зависимости от конструкционных особенностей ротора: от 90 до 0.9 градусов. Шаг можно дробить при помощи программных ухищрений, снижая при этом шум от работы драйверов и увеличивая точность, благодаря повышенному числу шагов на оборот. Точность может составлять до 20 микрон.
Несмотря на высокоточность шагового двигателя, у него имеется существенный минус: пропуск шагов при повышенных нагрузках, поскольку двигатель не имеет обратной связи контроллером, а последний не умеет отслеживать работу шагового двигателя без углового датчика.

Недостатки шаговых двигателей:
- пропуски шагов при высоких ускорениях и больших нагрузках;
- низкая цена;
- неремонтопригодность.
Существуют шаговые двигатели с энкодером, ничем не отличающиеся от обычных, кроме дополнительных выводов с угловым датчиком. Это решает проблему с пропусками, но добавляет немало к стоимости. Плюс для их использования нужно иметь специальный контроллер, имеющий функцию коррекции ошибки шаговика.
Несмотря на недостатки, шаговые двигатели широко используются как в крупных отраслях промышленности, так и для бытовых нужд:
- в тяжелых и высокоточных станках (в металлообработке, лазерной резке);
- в легких ЧПУ (домашние 3D-принтеры, гравировальные машины);
- в робототехнике (роботы со сложной кинематикой);
- в игрушках (машины, самолеты).
Сервопривод и шаговый двигатель не являются между собой конкурентами. Под каждую задачу необходимо выбрать свой тип мотора.
Сервопривод или шаговый двигатель: какова разница и что выбрать?

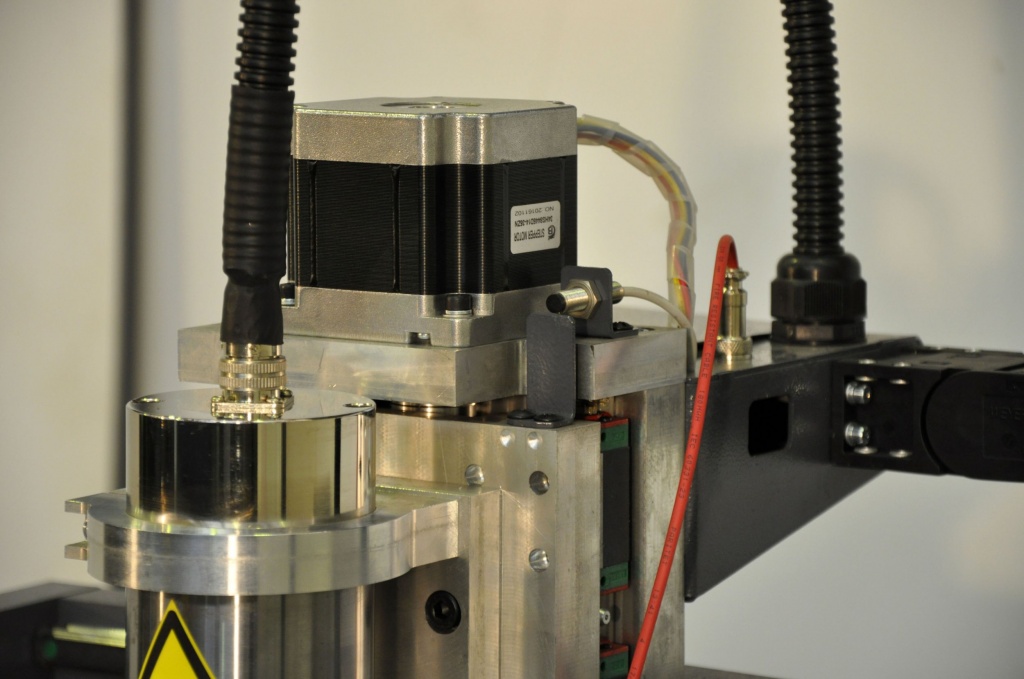
В качестве электропривода порталов и исполнительных узлов фрезерно-гравировальных станков с чпу и оборудования для плазменной резки с ЧПУ применяются шаговые двигатели и сервоприводы. Что лучше: шаговый двигатель или сервопривод, и в каких случаях применение того или иного электропривода экономически и технически оправданно, рассмотрим в данной статье.

Устройство шагового привода
Шаговый привод состоит из синхронной электрической машины и управляющего контроллера. Последний обеспечивает подачу управляющих сигналов на обмотки двигателя и их попеременное включение в соответствии с заданной программой.
Шаговый двигатель — электрическая машина, преобразующая управляющие сигналы в перемещение вала на определенный угол и фиксацию его в заданном положении. Количество шагов таких электродвигателей составляет от 100 до 400, угол шага — от 0,9-3,6°.
Принцип работы шагового двигателя
Состоит это электромеханическое устройство из статора, где размещены катушки возбуждения, и вращающейся части с постоянными магнитами или обмотками. Такая конструкция ротора обеспечивает его фиксацию после отработки управляющей команды.
На статоре расположено несколько обмоток. При подаче напряжения на катушку, под воздействием магнитного поля ротор поворачивается на определенный угол в соответствии с пространственным положением обмотки. При ее обесточивании и подаче управляющего сигнала на другую катушку вращающаяся часть электродвигателя занимает другую позицию. Каждый поворот вала соответствует углу шага. При обратной последовательности подачи напряжения на катушки ротор вращается в противоположном направлении.
Для поворота ротора на меньший угол одновременно включаются 2 обмотки. Количество шагов ограничено и зависит от числа полюсов статора электромотора. Для обеспечения плавного вращения ротора на катушки статора подают разные токи, разность которых определяет положение ротора. Такой способ управления позволяет снизить дискретность и увеличить количество шагов до 400.
К числу недостатков шаговых двигателей можно отнести довольно низкую скорость, пропуск шагов при высокой (выше расчетной) нагрузке на валу, снижение момента при высокой частоте вращения и большое время разгона.
Устройство сервопривода
Сервопривод состоит из синхронного двигателя, датчика скорости и положения, а также управляющего контроллера. Основная разница между шаговым двигателем и сервоприводом состоит в наличии обратной связи по положению, скорости, моменту на валу ротора.
Электропривод такого типа построен на базе следящей схемы автоматического регулирования. При несоответствии скорости или другой величины контроллер будет подавать сигналы на отработку, пока требуемый параметр или положение вала не будет соответствовать заданному. В качестве датчика обратной связи используют абсолютные и относительные энкодеры различных типов и конструкций.

Принцип действия сервопривода
Управляющее устройство в соответствии с заданной программой подает напряжение на сервопривод, который соединен с порталом станка. Двигатель перемещает рабочий орган. При этом энкодер вырабатывает импульсы, поступающие на контроллер. Подсчет их числа осуществляет управляющее устройство. Количество импульсов пропорционально перемещению портала. При достижении рабочим органом заданного положения на электромотор перестает поступать напряжение. Портал фиксируется. Пока число импульсов, зафиксированных контроллером с датчика, не достигнет запрограммированной величины, двигатель будет осуществлять перемещение рабочего органа.
Шаговый сервопривод можно также настроить на поддержание постоянной частоты вращения вне зависимости от нагрузки или постоянного момента при разной скорости.
К достоинствам сервоприводов относятся точность позиционирования, динамика разгона и отсутствие снижения момента при высоких скоростях. Ограничивает применение сервопривода, как правило, достаточно большая стоимость.
Чем отличается сервопривод от шагового двигателя?
| Критерий сравнения | Шаговые двигатели | Сервоприводы |
|---|---|---|
| Эксплуатационный ресурс | Шаговые электромоторы не имеют коллекторного узла, подверженного износу. Также они не имеют частей, нуждающихся в регулярном техобслуживании и замене | Коллекторные серводвигатели необходимо регулярно обслуживать. Максимальный срок службы коллекторного узла — 5000 часов непрерывной работы. При этом бесщеточные сервомоторы не уступают в надежности шаговым двигателям |
| Точность перемещений исполнительного органа |
Современные шаговые электродвигатели обеспечивают перемещение рабочей части с точностью до 0,01 мм.
Отличие шагового двигателя от сервопривода заключается в пропуске шагов при высокой (выше расчетной) нагрузке, что значительно снижает качество обработки
Сервопривод для поворотного стола фрезерного станка или портала другого оборудования обеспечивает точность до 0,002 мкм.
Позиционирование по следящей схеме обеспечивает высокое качество обработки независимо от нагрузки
Максимальная скорость перемещения рабочих органов при использовании шагового электропривода — 25 м.
Время разгона — 120 об/мин за секунду
Сервопривод может перемещать портал со скоростью более 60 м/мин.
Время разгона составляет до 1000 об/мин за 0,2 секунды
Критерии выбора
Тип приводного двигателя для станков выбирают по следующим характеристикам:
По этому параметру сервоприводы значительно превосходят шаговые электромоторы. На станок с ЧПУ для обработки крупных деталей или заготовок из твердых материалов лучше уставить сервомотор, например, ESTUN 1000 Вт. Такой электропривод обеспечит более высокую скорость обработки твердых материалов. Для малогабаритного промышленного оборудования (например, настольного фрезерного станка) среднего класса точности, предназначенного для обработки мягких материалов, лучше выбрать шаговый двигатель.
Программирование и настройка сервопривода на станке с ЧПУ требуют высокой квалификации исполнителя. Такой привод намного дороже в обслуживании, соответственно расходы на его эксплуатацию будут выше.
Сервоприводы для станков с ЧПУ необходимы для высокоточной автоматизированной обработки. Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
Стоимость шагового двигателя значительно ниже цены сервопривода. При невысоком бюджете лучше предпочесть первый вариант.
По этому показателю сервомоторы предпочтительней. Работа шаговых электродвигателей сопровождается звуком, соответствующим частоте шагов на различных оборотах.
Таким образом, выбор сервопривода или шагового двигателя в качестве привода на фрезерно-гравировальный станок и оборудование для плазменной резки следует совершать, руководствуясь исключительно экономической и технической целесообразностью.




Предприятие MULTICUT образовано в 2009 году с целью организации выпуска отечественных координатных установок с ЧПУ для решения различных производственных задач.
подробнее о производстве
Шаговый мотор как сервопривод
Каталог продукции
Дополнительно
Руководства и инструкции
Статьи
Кто на сайте?
Сейчас на сайте 89 гостей и нет пользователей
Сравнение шаговых и серводвигателей
В работе фрезеров используются два типа двигателя: шаговый – электромеханическое устройство, преобразующее сигналы в угловое перемещение ротора с фиксацией в заданном положении. И серводвигатели – имеющие обратную связь, и которыми можно управлять через цепь контроллера путём увеличения и уменьшения тока. Шаговые имеют меньшую мощность и скорость, и значительно дешевле серводвигателей.
Как правило, шаговый электродвигатель – это электромеханическое устройство, которое преобразует сигналы управления в угловое перемещение его ротора с качественной фиксацией в заданном положении. Сегодня современные шаговые двигатели (ШД), по сути, являются синхронными двигателями, не имеющими пусковую обмотку на роторе, что соответственно объясняется частотным пуском самого ШД. Последовательная активация обмоток двигателя порождает дискретные угловые перемещения (т. е. – шаги) ротора. Отличительная особенность этих двигателей – это возможность без датчика обратной связи осуществлять позиционирование по положению.
Шаговый двигатель относится к классу так называемых «бесколлекторных» двигателей постоянного тока. Такие двигатели как непосредственно и любые другие бесколлекторные электрические машины, имеют достаточно высокую надежность и весьма внушительный срок службы, что в свою очередь позволяет применять их в самых разных индустриальных сферах. Если сравнивать обычные электродвигатели постоянного тока с шаговыми двигателями, то последние требуют более сложных схем управления, выполняющие абсолютно все коммутации обмоток.
Сегодня существуют три основных типа/вида шаговых двигателей:
- Гибридные двигатели – наиболее часто используемые во фрезерных станках с числовым программным управлением.
- Двигатели с постоянными магнитами.
- Двигатели, имеющие переменное магнитное сопротивление.
Гибридные шаговые двигатели
Считается, что гибридные двигатели совмещают в себе наилучшие черты ШД с переменным магнитным сопротивлением, а также двигателей с постоянными магнитами. У гибридного двигателя ротор имеет зубцы, которые расположены в осевом направлении. Шаговые гибридные двигатели обеспечивают более меньшую величину шага, большую скорость и больший момент, чем двигатели других типов/видов. Обычно, число шагов для гибридных двигателей может составлять от 100 до 400 (при этом угол шага 3.6 – 0.9о).
Строение шаговых двигателей
Шаговый электрический двигатель состоит из статора, где расположены обмотки возбуждения (т. е. катушки электромагнитов) и соответственно ротора с постоянными магнитами (также используются роторы с переменным магнитным сопротивлением – но реже). ШД с магнитным ротором позволяют обеспечивать фиксацию ротора при обесточенных обмотках и получать больший крутящий момент. Именно благодаря этому, шаговые двигатели достаточно часто применяются в станках с ЧПУ.
Достаточно высокая температура, которая создана в катушках, способна легко рассеяться через массу самого двигателя, таким образом, шаговые электродвигатели от нагрева менее подвержены повреждениям.
Принципы работы шагового двигателя
Как правило, в соответствии с тем, какие именно катушки статора выключены или включены, ротор будет вращаться, чтобы так сказать «подстроиться» к магнитному полю. Например, если представить ШД с двумя катушками в статоре, а в качестве ротора постоянный магнит, то когда соответствующие катушки статора достаточно возбуждены, постоянно намагниченный ротор обязательно повернется, чтобы с магнитным полем статора «выстроиться» в линию. Ротор останется в данном положении, если поле соответственно не вращается.
Когда к этой катушке не будет поступать энергия, а будет направлена непосредственно к следующей катушке, то ротор снова повернется, чтобы подстроиться к полю новоиспеченной позиции. При этом абсолютно каждый поворот обязательно соответствует углу шага, который в свою очередь может измениться от 180о до доли градуса (т. е. до 60о). Затем, в то время когда вторая катушка выключена, включается следующая. Это заставит повернуться ротор на следующий шаг, причем в том же направлении. Данный процесс продолжается до тех пор, пока одна катушка включается, а соответственно другая выключается.
Последовательность шести шагов возвратит ротор в то же состояние, какое было в самом начале последовательности. Теперь если представить, что при завершении первого шага, вместо включения одной катушки и выключения второй – обе катушки были бы включены. В таком случае, ротор повернется только лишь на 30о (т. е. всего на половину от 60о), чтобы выровняться в направлении наименьшего сопротивления. Таким образом, если первая катушка включена, в то время когда вторая выключена, ротор должен повернуться еще на 30о. Называется это действием полушага, что непосредственно включает последовательность восьми движений.
Во время противоположной последовательности выключений/включений, ротор будет совершать обороты в противоположном направлении. В промышленности наиболее применим именно шаговый мотор, который продвигается на угол от 1.8о и до 7.5,о при полном шаге. Для того чтобы размер шагов уменьшить, число полюсов необходимо увеличить. Однако при этом есть физический предел, сколько непосредственно полюсов могут использоваться.
Чтобы снизить дискретность перемещения ротора ШД применяется, как правило – микрошаговый режим. Непосредственно сам микрошаг реализуется при автономном управлении током обмоток шагового двигателя. Управляя соотношением токов находящихся в обмотках, ротор можно зафиксировать между шагами в промежуточном положении. Таким образом, можно увеличить плавность вращения ротора, а также достичь высокой точности позиционирования. Кроме того, в микрошаговом режиме разрешающую способность можно получить в 51200 шаг/об, что положительно отразиться на работе оборудования в целом.
Механическая характеристика шагового двигателя
Очень важной особенностью ШД является, конечно же, их механическая характеристика.
Управление шаговым приводом
Управление шаговым двигателем в самом общем виде сводится к задаче отработать обусловленное число шагов в потребном направлении и с необходимой скоростью.
На блок управления шагового двигателя (т. е. драйвер) подаются определенные сигналы «сделать шаг» — «задать направление». Эти сигналы представляют собой ничто иное как – импульсы 5В.
Данные импульсы можно получить непосредственно от компьютера, к примеру, от LPT-порта, от специализированного контроллера управления шаговыми приводами или же задавать сигналы независимо от генератора 5В или источника питания.
Как правило, работой ШД управляет электронная схема, а его питание выполняется от источника постоянного тока. ШД используют для управления частотой вращения, чтобы не применять дорой контур обратной связи. Данный привод применяется в приводе исключительно с разомкнутой цепью.
Серводвигатели
Серводвигатель – это непосредственно двигатель с обратной связью, которой можно управлять, чтобы или достичь требуемой скорости (следовательно, крутящего момента) или же получить необходимый угол поворота. Именно для этой цели устройство обратной связи посылает определенные сигналы в цепь контроллера серводвигателя, сообщая о скорости и соответственно угловом положении. Если в результате наиболее высоких нагрузок скорость окажется гораздо, ниже требуемой величины, то ток будет увеличиваться покуда скорость не достигнет потребной величины. Когда сигнал скорости показывает, что она больше, чем необходимо, то ток соответственно, уменьшается. Если же по положению применена обратная связь, то сигнал о нем используется, чтобы остановить двигатель в тот момент, когда непосредственно ротор приблизится к необходимому угловому положению.
Для этого могут использоваться разные типы/виды датчиков, включая кодирующие устройства, например, такие как: потенциометры, тахометры и резольверы. Если применяется датчик положения типа кодирующего устройства или потенциометра, его сигнал вполне может быть дифференцирован для того, чтобы выработать определенный сигнал о скорости.
На сегодняшний день сервоприводы используются в высокопроизводительном оборудовании, к примеру, в таких производственных отраслях как: изготовление различных стройматериалов, напитков, упаковки, в полиграфии и подъемно-транспортной технике. Также в последнее время наблюдается тенденция к умножению доли сервоприводов в пищевой промышленности и деревообработке.
Решающим фактором использования сервоприводов является не только высокая их динамика, но и возможность получить высокостабильное или точное управление, широкий диапазон регулирования скорости, малые габариты и вес, а также помехоустойчивость.
Принципы работы серводвигателя
Серводвигатели функционируют вместе с устройствами, которые называются преобразователи (приводы или драйвера серводвигателей). Данные преобразователи меняют напряжение на обмотке возбуждения (или на якоре) сервомотора в зависимости от непосредственной величины напряжения на входе самого двигателя. Вся эта система, как правило, управляется стойкой ЧПУ (СNC). Далее схематично представлена система с сервомотором. Непосредственно под «усилителем» понимается драйвер серводвигателя.
К примеру, в программе, которая заложена в стойке ЧПУ, присутствует особая команда «на расстояние в 10 мм — переместиться по оси Y». На вход драйвера сервомотора со стойки ЧПУ подается определенное напряжение. Серводвигатель начинает вращать ходовой винт, соединенный с энкодером и порталом станка (т. е. перемещаемая часть со шпинделем). При вращении ходового винта энкодер вырабатывает определенные импульсы, которые подсчитывает стойка.
Математическое обеспечение стойки ЧПУ, как правило, устроено таким образом, что стойка «располагает сведениями», что: расстоянию в 10 мм соответствует, к примеру, 10 000 импульсов от энкодера. Следовательно, пока стойка станка не примет эти 10 000 импульсов, то на вход драйвера будет передаваться напряжение задания, то есть будет вырабатываться – рассогласование. Когда портал станка пройдет заданные 10 мм, стойка станка свои 10000 импульсов получает в полном объеме, поэтому напряжение на входе драйвера серводвигателя станет равным (0) «нулю», двигатель остановится, и станок отлично отработает строго 10 мм (причем при абсолютном отсутствии люфтов).
Если под каким-либо воздействием произойдет смещение портала станка – энкодер сразу выдаст импульсы. Данные импульсы будут сосчитаны стойкой, а затем она выдаст напряжение рассогласования непосредственно на драйвер, который повернет якорь двигателя на очень малый угол, чтобы рассогласование равнялось нулю. Таким образом, портал станка отлично удерживается возле заданной ему точки с достаточно высокой точностью.
Также нужно заметить, что далеко не каждый двигатель может поворачиваться на очень малые углы, обеспечивать нужный крутящий момент, динамику разгона и т. д. Это основная причина из-за чего сервоприводы относятся к дорогостоящим устройствам.
Синхронные серводвигатели
Синхронные серводвигатели – трехфазные синхронные электродвигатели с датчиком положения ротора, (т. е. AC-двигатели) и возбуждением от постоянных магнитов. Основным их достоинством является достаточно низкий момент инерции ротора по отношению к крутящему моменту, что в свою очередь позволяет реализовать высокое быстродействие. Всего лишь за десятки миллисекунд достигается разгон на номинальную частоту вращения и реверс с полной скоростью в пределах 1-го оборота вала двигателя.
Как правило, основная область применения данных двигателей является приводы подач станков, а также технологические установки с временным циклом менее 1 секунды (к примеру, быстродействующие позиционные системы самодействующих складов, производство упаковки).
Для сервоприводов характерны такие показатели как:
- управление по моменту, по скорости или по позиции;
- статическая точность поддержания скорости непосредственно по валу двигателя не более чем 0,01%;
- диапазон регулирования скорости более чем в 1:1000;
- точность поддержания позиции по валу двигателя менее ± 10;
- компактные размеры и низкий вес:
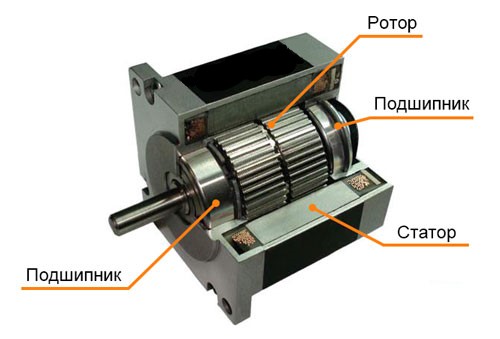
1 — разъем для подключений;
2 — статор с обмоткой;
3 — датчик скорости и положения;
4 — ротор с магнитами;
5 — электромагнитный тормоз.
- отсутствие и бесконтактность узлов, требующих обслуживания;
- достаточно высокое быстродействие;
- значительная перегрузочная способность по моменту (т. е. кратность предельного момента кратковременно может превысить 3);
- практически неограниченный диапазон (1:10 000 и более) для регулирования частоты вращения;
- показатели кпд вентильных двигателей, как правило, превышают 90%, при изменении мощности нагрузки двигателя, при колебаниях напряжения питающей электросети меняются очень несущественно, в отличие от асинхронных электродвигателей, где максимальный кпд не превышает и 86%, а также, напрямую зависит от изменений нагрузки;
- достаточно низкий перегрев вентильного электродвигателя, потому как на роторе двигателя отсутствует обмотка, что существенно увеличивает его срок службы, работающего в режиме учащенных перегрузок;
- довольно-таки большая плотность момента на одну единицу массы электродвигателя.
Шаговые двигатели или серводвигатели: выбор двигателей для фрезерно-гравировального станка
Прежде всего, нужно сравнить два вида этих моторов по некоторым параметрам:
Срок службы и обслуживания
Шаговые двигатели – бесщеточные, поэтому единственными изнашиваемыми деталями в конструкции являются подшипники (изначально очень надежная конструкция). Это позволяет считать их двигателями высокой надежности и не требующих обслуживания долгий срок.
Дешевые модели сервоприводов коллекторного типа (со щетками) менее надежны, чем шаговые двигатели и требуют замены щеток примерно через 5000 часов непрерывной работы.
Большинство современных бесколлекторных сервоприводов от известных японских производителей отличаются высокой надежностью (близкой к надежности шаговых двигателей).
Порча подшипников происходит очень редко. Может сгореть обмотка статора. Дешевле купить новый двигатель.
Ремонтопригодны только самые дорогие модели. Проще двигатель сразу менять.
При хорошей механике точность не ниже +/- 0.01 мм
У высококачественных сервоприводов точность не ниже +/- 0.002 мкм. Такая точность достижима в случае использования сервоприводов контурного управления (точно обрабатывающих заданную траекторию). Нельзя использовать сервопривода для позиционного управления, так как они иногда дают погрешность значительно превышающую, погрешность в шаговых двигателях!
Скорость перемещения, мощность
В гравировально-фрезерных станках используя шаговые двигатели можно добиться скорости 20 – 25 метров в минуту. При увеличении скорости шаговые двигатели сильно теряют в крутящем моменте.
С использованием сервоприводов в станках с ЧПУ возможно достижение скоростей до 60 м/мин и более.
до 1000 об/мин за 0,2 секунды
Эффект потери шагов при повышении скорости и нагрузки
На скоростях выше номинальных и повышенных нагрузках начинает проявляться эффект потери шагов (смотрите выше график возможной нагрузки от скорости вращения двигателя – механическую характеристику). Потеря шагов возможна также в случае каких либо внешних воздействий: ударов, вибраций, резонансов и т.п.
Современные системы управления шаговыми двигателями позволяют избавиться от этого общего недостатка шаговых двигателей.
Так как сервосистема – это система с обратной связью: в сервомоторе имеется датчик положения, по которому (в случае несоответствия) делается коррекция — то эффекта потери шагов в ней нет.
Принудительная остановка (столкновение с препятствием)
Принудительная остановка шагового двигателя не вызывает у него никаких повреждений
В случае принудительной остановки серводвигателя, драйвер мотора должен правильно среагировать на данную остановку. В противном случае по обратной связи подается сигнал на доработку не пройденного расстояния, повышается ток на обмотках, двигатель может перегреться и сгореть!
Шаговые двигатели значительно дешевле серводвигателей, особенно шаговые двигатели китайского производства.
Чисто конструктивно (датчик положение, более сложный, чем у шагового двигателя, драйвер) серводвигатели дороже шаговых. К тому же, я не встречал в своей практике дешевых китайских серводвигателей.
Шаговый двигатель и сервопривод абсолютно не являются конкурентами, так как каждый занимает исключительно свою предопределенную нишу.
Сравнение работы простого Серво и Шагового двигателей:
Для понимания различия между обычным шаговым и серво двигателем давайте рассмотрим работу системы именно с шаговым мотором, на котором непосредственно стоит энкодер (шаговый серводвигатель).
Контроллер выдал команду на какое-то количество шагов – повернуть вал. В обычном шаговом двигателе контроллер не в курсе, насколько конкретно шагов повернулся вал (т. к. у него отсутствует обратная связь). Просто он «считает», что вал повернулся правильно. А ведь бывает, что двигатель не смог повернуть вал или силы не хватило или по другой какой-либо причине. Хотя при этом контроллер четко отсчитал импульсы. Это и есть так называемый пропуск шагов в шаговом двигателе.
В серводвигателе же подобная проблема полностью отсутствует. Контроллер дал команду вал повернуть настолько-то импульсов и ожидает покуда с энкодера придет сигнал, который подтвердит, что вал повернулся на необходимое число импульсов. При этом если с энкодера поступил, хотя бы на 1 импульс меньше, контроллер все равно будет продолжать подавать команду, пока с энкодера не поступит последний импульс, который выровняет соотношение истинного и заданного количества импульсов. Либо же по истечении заданного периода времени, контроллер выдаст специальный сигнал «Ошибка перемещения».
В сервоприводе удержание осуществляется исключительно за счет тока, протекающего непосредственно через обмотку двигателя. При этом в момент удержания половины периода ток поступает в одном направлении, а вторую половину оставшегося времени в ином направлении. Именно за счет этого происходит удержание якоря. В это время по импульсам с энкодера подходит проверка, якорь на месте (на выходе нет ни одного импульса) или же сдвинулся (на выходе энкодера, как правило, появится импульс, вернее код).
Преимущества шагового двигателя:
— Шаговые двигатели существенно дешевле, нежели серводвигатели.
— Простота конструкции, а значит и простота ремонта.
— Простота системы управления (подходят практически все программы написанные для CNC станков).
Преимущества серводвигателя:
— Бесшумность и плавность работы в некоторых случаях делают сервоприводы единственным возможным вариантом для работы.
— Надежность и безотказность: возможность применения в ответственных устройствах.
— Высокая точность и скорость перемещений доступны также и на низких скоростях.- Способность двигателя может выбираться пользователем непосредственно от того какую конкретно задачу необходимо выполнить.
Выводы:
Ограничением в использовании шаговых двигателей являются мощность и соответственно скорость, однако по практике, их применение целиком оправданно в недорогих станках имеющих систему ЧПУ, предназначенных для обработки дерева, ДСП, МДФ, пластиков, легких металлов и прочих материалов средней скорости, необходимости производителей станков с ЧПУ по точности и по скорости. Если по каким-либо причинам такие параметры не устраивают, то, как правило, используют сервоприводы. Но стоит заметить, что при этом резко и, причем значительно поднимается стоимость конструкции в целом.
Если смотреть с другой стороны, то достичь реальной экономии времени обработки и даже при скоростных сервоприводах, можно за счет экономии на переходах и соответственно оптимизации путей обработки. В остальное же время, скорость весьма ограничена – режимами резки. Между деталью и приводом есть еще и фреза о чем часто забывают.
Достоинства сервопривода таковы, что использовать их можно было бы постоянно, когда только возможно, конечно если бы не два существенных недостатка: цена самого комплекта (т. е. блок управления + сервомотор) и сложность настройки, которая временами делает применение сервопривода совершенно – необоснованным.
В каких случаях необходимы сервоприводы:
- При скоростных раскроях материала «листового» (скорость перемещения инструмента более чем 25 метров в минуту). Следовательно, в таком случае целесообразно приобретать именно «раскроечный» станок с достаточно мощным шпинделем (до 5 кВт) и с цангой под большой инструмент, с вакуумным столом, с системой удаления стружки и, конечно же, с сервоприводами.
- При производстве матриц и форм с претензионной точностью изготовления. В данном случае больше всего подходит фрезерный обрабатывающий центр, который можно заказать у компании INTERLASER.
В остальных же случаях наиболее чаще приобретают машины именно с шаговыми двигателями – просто это наиболее практичнее.