
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Давно я тут не писал постов про принтеры и электронику, но тут назрела тема использования абсолютного энкодера и попытке сделать вменяемое упралвение шаговым двигателем с рассчётом на точность позиционирования (не путать с повторяемостью).
В качестве подопытного было приобретено несколько разных магнитных энкодеров наподобие тех, что используются в таких проектах как mechaduino (или его китайская инкарнация как MSK Servo42) или же в системах стабилизации камер (внезапно там используются те же магнитные энкодеры). В итоге у меня оказалось два их от разных производителей:
- AS5048A с разрешением 12bit (если пересчитать в угол по нехитрой формуле 360/2**12
0.08789 градуса)
TLE5012b с разрешением 15bit (опять же если пересчитать в угол то 360/2**15
В итоге я остановился на втором варианте, так как его разрешения хватает что бы легко ловить повороты даже для двигателя в 400 шагов на оборот при 32 микрошаге (а это получится примерно так 360/(400*32)
0.028125 градуса), хотя это уже и экстремальный вариант.
На макетке была собрана конструкция из stm32f103c8t6 aka bluepill энкодера и драйвера шагового двигателя tmc2130 (взял то что было под руками). Всё это счастье было запрограммировано на довольно простые действия:
- stm32 имеет прерывания на трех пинах которые подключены к Step/Dir/Enable на плате управления принтером
- при получении сигналов на Step/Dir/Enable производится stm32 делает шаг через tmc2130
- после завершения шага (если успевает) считывает положение двигателя через энкодер tle5012b (на валу двигателя помещён магнит)
- stm32 печатает в UART инфу о количестве шагов, микрошаге, количесве оборотов и текущем угле поворота двигателя (энкодер таки абсолютный и умеет считать обороты)
Дальше у меня возникла идея проверить насколько точно шаговик встаёт по шагам. Для этого в управляющей плате принтера (которая тоже stm32 но пожирнее) были выставлены виртуальные 80 steps/mm для оси X (в принципе это значение стандартное для 20 зубой шпули для GT2) а драйвер двигателя был выставлен в 16 микрошаг (двигатель у меня 1.8 градуса, 200 шагов на оборот, и как следствия с 16 микрошагом каждый шаг соответсвует 360/(200*16) = 0.1125 градуса, запомним эту цифру). Я решил посмотреть как у нас зависит точность выставления угла поворота от скорости принтера (а как следствие и точность). Как происходило тестирование:
- Был выбран набор скоростей: 10, 25, 50, 75, 100, 125, 150, 200, 250 мм/с
- Для каждой скорости передвижение с X0 до X160 и обратно и ожидание в крайних положения по 2 секунды (это 4 оборота движка в одну строну и в другую) повторялось по 25 раз
- Данные с энкодера писались в лог (скриптик с сериал консоли всё писал в файлики)
В итоге получилось довольно занятная картинка: 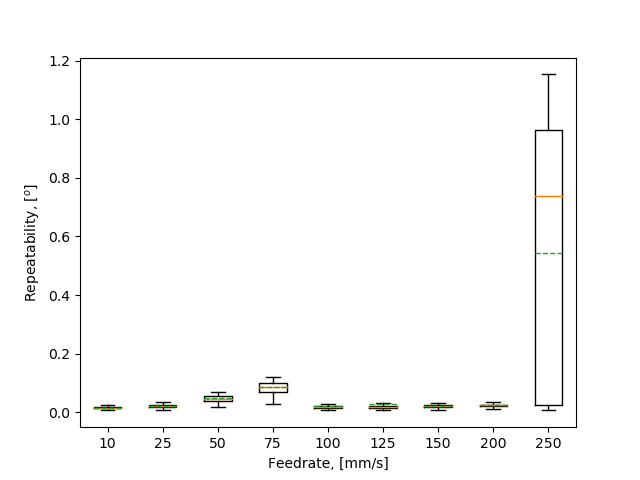 1.875 оборота в секунду) ошибка повторяемости позиционирования шаговика становится сравнимой с одним микрошагом
1.875 оборота в секунду) ошибка повторяемости позиционирования шаговика становится сравнимой с одним микрошагом
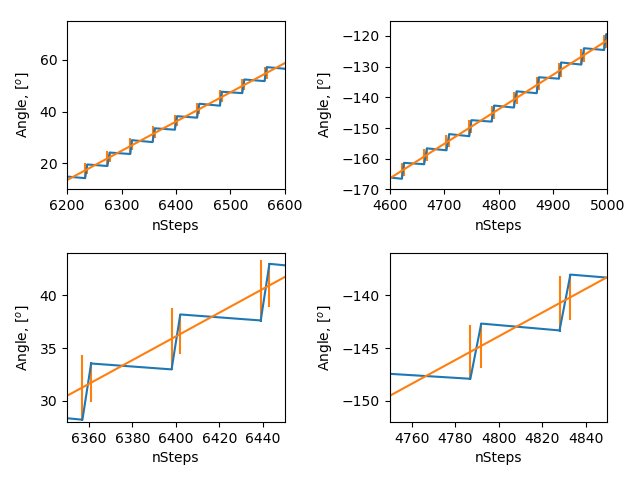
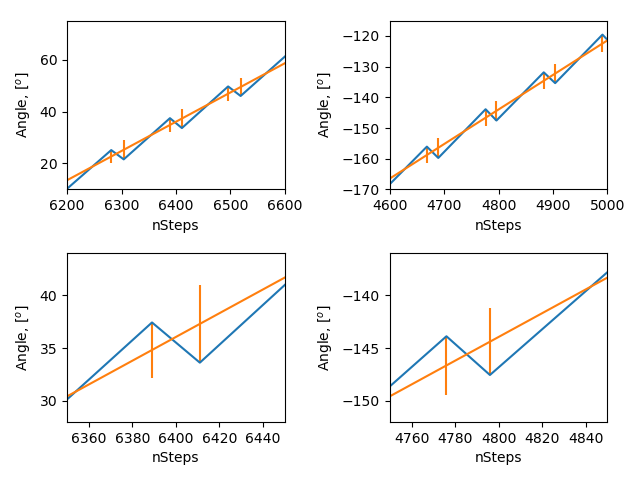
Но это если речь идёт о повторяемости а не о точности. А это разные понятия. Так что теперь поговрим про точность. Будем считать, как это далают прошивки большниства принтеров, что перемещение на один микрошаг у нас всегда одианково (в данном случае это 0.1125 градуса или 0.0125 мм если у нас 80 шагов на мм). Посмотрим насколько это так. То что мы видим при скорости 10мм/с (да довольно медленно) 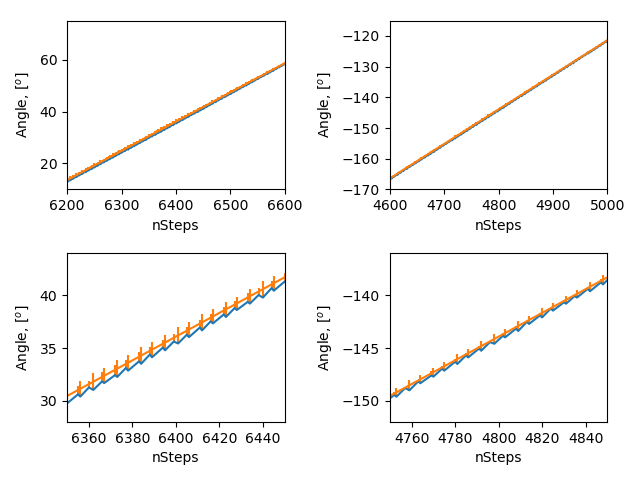 На картинках нарисовано чтение с датчика и счётчик шагов (данные датчика это синяя линия) а так же идеальные значения углов для данного номера шага (хе хе, довольно просто посчитать) а так же вертикальными черточками различия реально измеренного от идеального. Какие выводы можно сделать по этой картинке:
На картинках нарисовано чтение с датчика и счётчик шагов (данные датчика это синяя линия) а так же идеальные значения углов для данного номера шага (хе хе, довольно просто посчитать) а так же вертикальными черточками различия реально измеренного от идеального. Какие выводы можно сделать по этой картинке:
- Шаги у нас не равномерны (что в целом понятно, исходя из физики двигателя)
- Какие то шаги у нас почти точно попадают в идеальные значения углов поворота (но не все. совсем не все. )
- Хотя точность позиционирования у нас не очень высокая, но повторяемость хорошая (синяя линия на картинке это статистика по 25 повторам
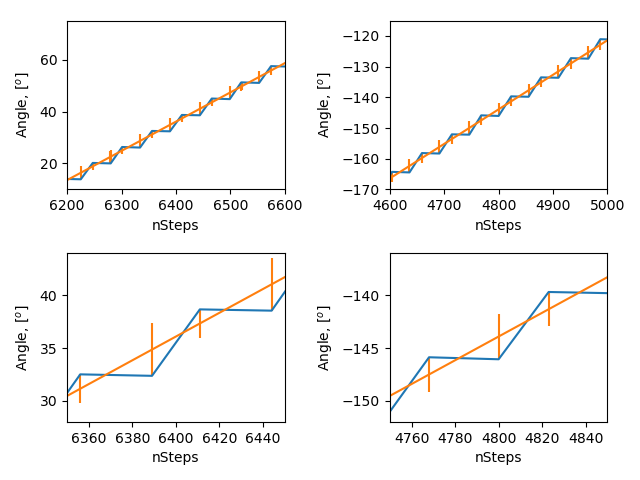
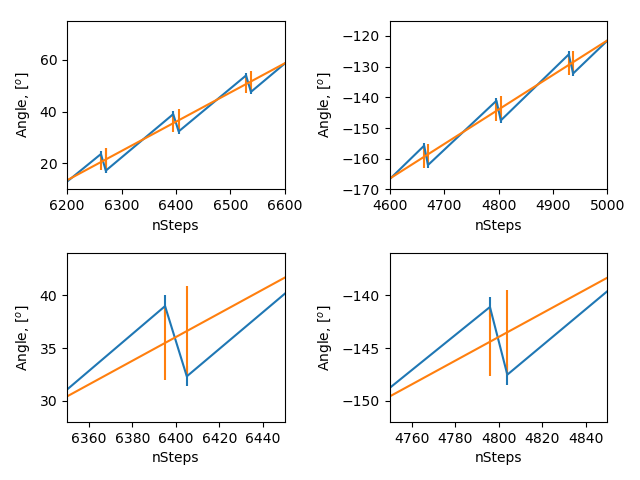
Теперь посмотрим что будет если шаговик пойдёт немного быстрее 25 мм/с
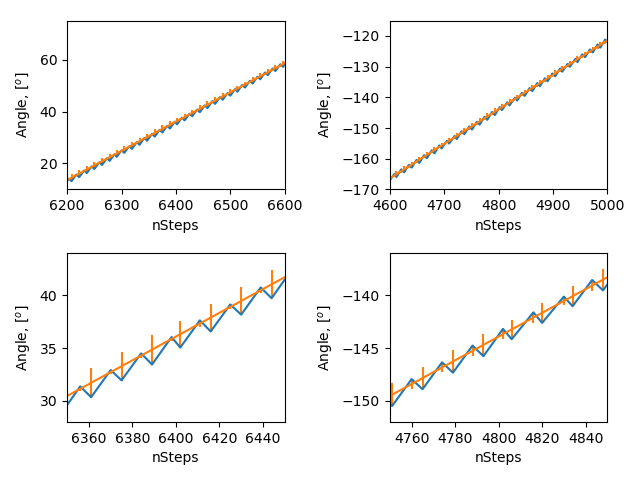
Картинка в целом не поменялась, но ошибка позиционирования возросла (разница между реальным и идеальным положением)
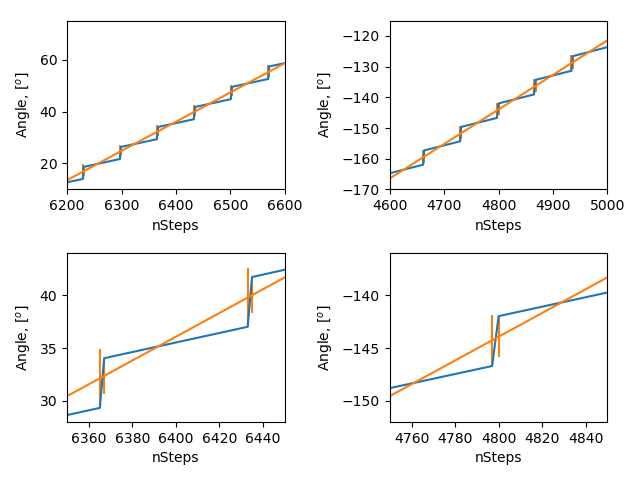
Видно что позиционирование стало ещё хуже.
Ошибка осталась на прежнем уровне (tmc2130 перешел в другой режим работы)
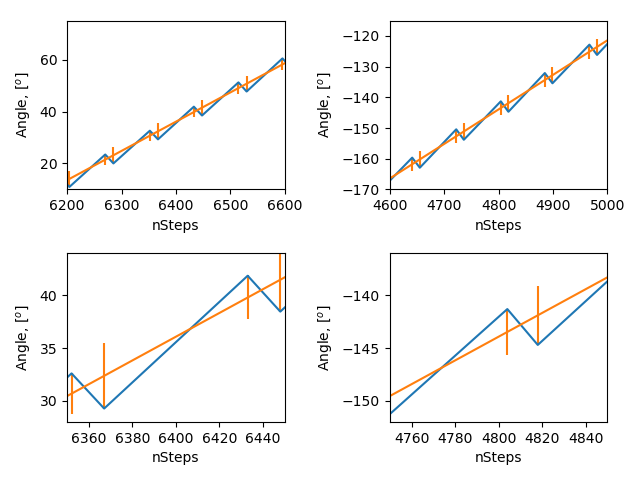
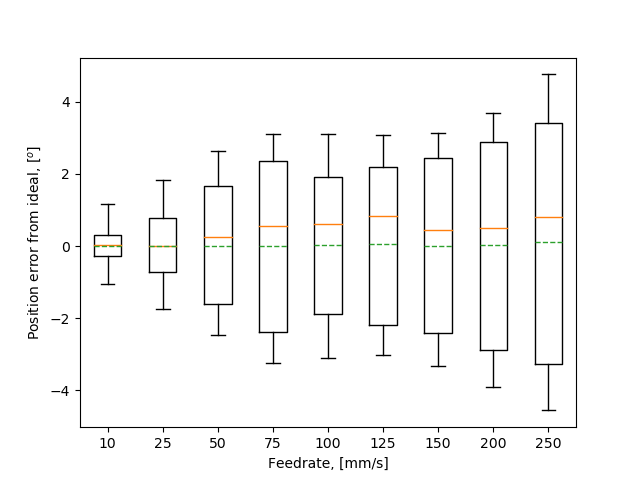
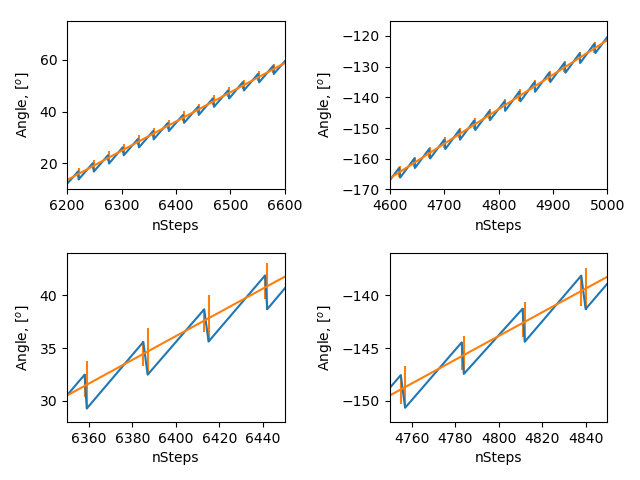
Картинка похожа на первую. Опять же зеленая линия это среднее. Оражневая медиана. Какие выводы можно сделать?
- Что приятно средняя ошибка позиционирования примерно 0. Что означает что шаговик с одинаковой вероятность как проскакивает положение, так и недоходит до него (по этому среднее и есть 0).
- А вот медиана уже становится большой. На уровне 0.5-0.8 градуса.
- Разброс ошибок довольно большой, он растёт с примерно 0.2 градусов при 10мм/с до 4 градусов при 250мм/с, что соответсвует разбросу хода от 0.02 до 0.5 мм (хе хе.. кто там хвастался что печатает на скорости 200+мм/с. )
- Ещё замечу, что всё это измерялось на свободном шаговике без нагрузки. С нагрузкой будет все печальнее (и я это проверю в следующей части)
Что из всего этого следует?
Если хочется повышать качество печати, то надо слегка поменять подход к позиционирования шаговика в прошивках (позицоинирование у него не линейное, и это надо учитывать). По идее надо сделать умный closed-loop шаговик, которые будет в состоянии корректировать нелинейности при перемещении.
- Подпишитесь на автора
- Энкодер для шагового двигателя
- Зачем шаговому двигателю энкодер?
- Преимущества шагового сервопривода
- Шаговые двигатели с энкодером Комментировать
- Преимущества сервоприводов на базе шаговых двигателей
- Купить шаговый двигатель с энкодером в Stepmotor
- Шаговые двигатели с энкодером и тормозом Yako
- 🎥 Видео
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Видео:Обзор шаговых двигателей с энкодером.Скачать

Энкодер для шагового двигателя
Шаговые двигатели, отличающиеся такими преимуществами, как простота конструкции, высокая точность, хороший КПД, надёжность и долговечность, пользуются очень высоким спросом на современном рынке. Удовлетворяющие потребности очень широкого круга пользователей, используются они практически повсеместно, в сферах, простирающихся от моделизма до крупных систем промышленной автоматизации. При этом абсолютно понятно, что, в зависимости от целей использования шагового электродвигателя и нагрузок, которые будут приходиться на данный агрегат, шаговый двигатель может быть использован как отдельно, так и в комплекте с дополнительным оборудованием – например, с контроллером. В последнее же время всё чаще становится актуальным использование схемы шаговый двигатель+контроллер шагового двигателя+энкодер . Насколько актуально применение энкодеров совместно с шаговыми электродвигателями, попробуем разобраться в данном материале.
Видео:Сравнение Шаговых Двигателей и Шаговиков с ЭнкодеромСкачать

Зачем шаговому двигателю энкодер?
Основным конкурентным преимуществом любого шагового двигателя, в сравнении с прочими типами электродвигателей, является высокая точность позиционирования, поэтому мнение, что в использовании энкодера совместно с таким двигателем является «излишней роскошью», конечно, имеет некоторые основания. Однако на практике дело обстоит несколько иначе. Существует ряд причин, по которым серводвигатель на основе шагового двигателя (шаговый двигатель с контроллером) может пропускать шаги. Чаще всего такими причинами становятся:
— работа оборудования в условиях повышенных нагрузок;
— высокие поперечные нагрузки;
— сильный резонанс при работе оборудования;
— некорректная работа контроллера и т.д.
Применение энкодера (а разрешающая способность таких устройств может достигать значения 2000 импульсов/оборот) в большинстве случаев позволяет избежать пропуска шагов, дополнительно повышая точность позиционирования ШД.
Рассмотри простой пример. При использовании шагового двигателя с контроллером без энкодера любой перебой в подаче питания к контроллеру практически неизбежно приводит к серьёзному сбою. Теряя точку отсчёта и не имея обратной связи, система теряет возможность возврата двигателя в исходное положение. Если же система оснащена энкодером, то в подобной ситуации можно без труда вернуть шаговый двигатель к нужной точке, чтобы продолжить дальнейшую работу в соответствии с заданной программой.
Преимущества шагового сервопривода
Использование схемы шаговый двигатель+контроллер шагового двигателя+энкодер позволяет создать на базе простых элементов полноценный сервопривод – именно такие шаговые сервоприводы всё чаще применяются в современном станочном оборудовании. В сравнении с другими вариантами сервоприводов, такой комплект, отличаясь широкими функциональными возможностями и высокой степенью надёжности, окажется более дешёвым, а также простым в настройках и управлении. Купите шаговый сервопривод на сайте торгового дома Степмотор – и убедитесь в этом сами!
Видео:Как работает шаговый двигатель с энкодеромСкачать

Шаговые двигатели с энкодером Комментировать
Использование шаговых двигателей в комплекте с энкодерами позволяет создавать на простой схеме, включающей в себя непосредственно шаговый двигатель и контроллер шагового двигателя полноценный сервопривод, который, при высокой функциональности и надёжности, будет значительно более дешёвым и простым в управлении, чем сервопривод на основе бесколлекторного двигателя. Совмещающий в себе все основные преимущества ШД с простотой настроек и обслуживания, такой сервопривод отличается высокой точностью позиционирования и полностью удовлетворяет потребностям широкого круга пользователей устройств такого типа, от моделистов до операторов станочного оборудования.
Видео:Шаговый двигатель + оптический энкодерСкачать

Преимущества сервоприводов на базе шаговых двигателей
Поскольку шаговый двигатель изначально отличается высокой точностью позиционирования (200 или 400 шагов на оборот +-5%), что является одним из основных его конкурентных преимуществ, традиционно считается, что установка энкодера на двигатель такого типа не является необходимостью. Однако практика доказывает, что даже при использовании самого надёжного контроллера возможен пропуск шагов, который может стать следствием целого ряда причин, таких, как:
– повышенная нагрузка;
– поперечная нагрузка;
– высокий резонанс;
– некорректное генерирование импульсов контроллером и т.д;
По сути, при использовании схемы ШД+контроллер даже такие незначительные неполадки, как перебои в подаче питания контроллеру могут стать причиной серьёзного сбоя: система управления теряет точку отсчёта, и, в отсутствии обратной связи, возвращение шагового двигателя к изначальному положению становится невозможным.
Использование шагового двигателя с энкодером позволяет решить вышеотмеченную проблему: при пропуске шагов или перебоях питания с помощью энкодера осуществляется возврат ШД к нужной точке, что позволяет продолжить корректную работу оборудования по заданной программе. Кроме того, применение энкодера позволяет дополнительно повысить точность позиционирования шагового двигателя, поскольку разрешающая способность энкодеров может достигать 2000 импульсов на оборот. Благодаря этим преимуществам сервоприводы на основе шаговых двигателей довольно часто применяются в сложном станочном оборудовании.
Купить шаговый двигатель с энкодером в Stepmotor
В каталоге Stepmotor представлен широкий выбор шаговых двигателей и энкодеров, что позволяет подобрать наилучшим образом подходящий сервопривод на основе ШД для оборудования любого типа. Если вы решили купить ШД с энкодером в наличии по доступной цене на нашем сайте, внимательно ознакомьтесь с характеристиками интересующих вас устройств и непременно убедитесь в том, что подобранные вами устройства совместимы. При возникновении вопросов по подбору оборудования, вы всегда можете проконсультироваться у технического специалиста по телефонам 8 800 5555 068 — по России (звонок бесплатный), в Москве +7 (495) 308-38-48, в СПб +7 (812) 953-07-32) или воспользовавшись формой обратной связи.
Видео:Работа энкодераСкачать

Шаговые двигатели с энкодером и тормозом Yako

Шаговый электродвигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками. Ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения ротора (шаги). Основными преимуществами ШД является экономичность, высокая точность позиционирования и простота настройки.
При перебоях в электропитании, превышении допустимой нагрузки, при высоком резонансе возможен пропуск шагов. Из-за отсутствия обратной связи система теряет точку отсчета, что приводит к порче заготовки или повреждению инструмента.
Для решения этой проблемы применяются шаговые двигатели с энкодером и тормозом.
ШД с энкодером и тормозом обладают рядом преимуществ, по сравнению с шаговыми двигателями без обратной связи:
- исключен пропуск шагов;
- прирост момента на 30% на высоких скоростях.
- отсутствует эффект колебания ротора в точке останова (ротор не «рыскает»);
- простота настройки;
- двигатель обеспечивает полный момент в режиме остановки;
- возможен быстрый старт, остановка или реверсирование.
Для управления серво-шаговыми двигателями используются специальные драйверы с поддержкой энкодера. Также можно подключать СШД к обычному драйверу, без использования энкодера. В этом случае точный контроль положения ротора производиться не будет.
Компания Purelogic R&D предлагает двухфазные и трехфазные серво-шаговые двигатели с тормозом Yako с фланцем 42-110 мм (NEMA 17-42) и крутящим моментом от 7.7 до 200 кг·см. Разрешение энкодера составляет 1000 имп/об, момент удержания тормоза от 2.4 до 80 кг·см. Подробные характеристики и цены указаны в разделе товара.
🎥 Видео
Китайский шаговый двигатель с энкодером.Скачать

Драйверы шагового двигателя T86 против HBS860H для мотора с энкодеромСкачать

Скрытая полезная функция двигателя от CD-ROM-аСкачать

Обзор шаговых двигателей и серводвигателей для станковСкачать

Посылка. Шаговые моторы с энкодером и мелочевкаСкачать

Подключение шагового двигателя.Скачать

Как быстро проверить шаговый двигатель с драйвером и энкодеромСкачать

Шаговый двигатель со встроенным драйвером и энкодером.Скачать

ОБОЗ СУПЕР ДРАЙВЕРА ПРОГРАММАТОРА.Скачать

Энкодер шаговый двигатель и драйвер,что это???Скачать

шаговый двигатель с энкодером iST-2320Скачать

Энкодеры. Подробный обзор с экспериментами!Скачать

Управление биполярным шаговым двигателем при помощи инкрементального энкодера. Инкрементный энкодер.Скачать

Энкодер из шагового двигателя на АрдуиноСкачать

трехфазный шаговый двигатель с энкодером на STM32F4Скачать
