
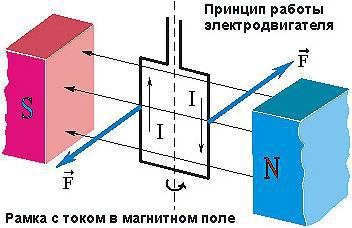
Принцип работы электрического двигателя:
В основу работы любой электрической машины положено явление электромагнитной индукции. Поэтому если в магнитное поле поместить рамку с током, то на неё подействует сила Ампера, которая создаст вращательный момент. Рамка начнет поворачиваться и остановится в положении отсутствия момента, создаваемого силой Ампера.
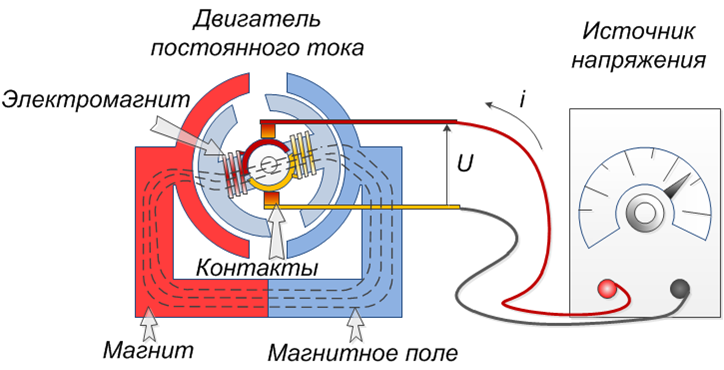
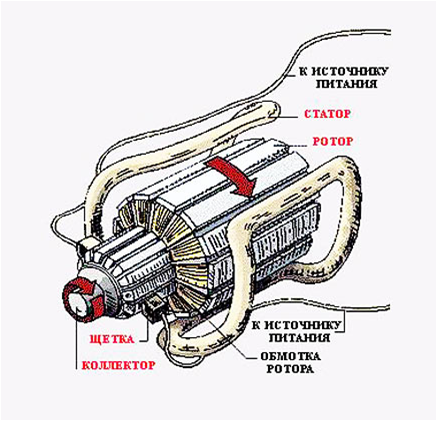
Устройство электрического двигателя:
Любой электрический двигатель состоит из неподвижной части — Статора и подвижной части — Ротора. Для того чтобы началось вращение, нужно по очереди менять направление тока. Эту функцию и выполняет Коллектор (щетки).
Бесколлекторный двигатель — это двигатель ПОСТОЯННОГО ТОКА без коллектора, в котором функции коллектора выполняет электроника. (Если у двигателя три провода, это не значит что он работает от трехфазного переменного тока! А работает он от «порций» коротких импульсов постоянного тока, и не хочу вас шокировать, но те же двигатели которые используются в кулерах, тоже бесколлекторные, хоть они и имеют всего два провода питания постоянного тока)
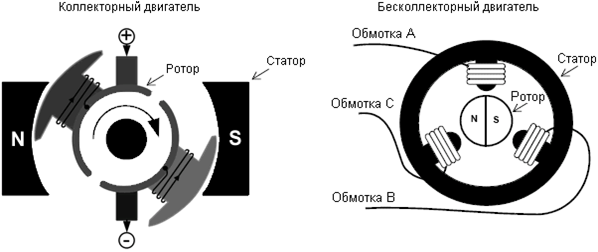
Устройство бесколлекторного двигателя:
Inrunner (произносится как «инраннер»). Двигатель имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
Outrunner (произносится как «аутраннер»). Двигатель имеет неподвижные обмотки (внутри) вокруг которых вращается корпус с помещенным на его внутреннюю стенку постоянными магнитами. 

Принцип работы:
Для того чтобы бесколлекторный двигатель начал вращаться, напряжение на обмотки двигателя надо подавать синхронно. Синхронизация может быть организованна с использованием внешних датчиков (оптические или датчики холла), так и на основе противоЭДС (бездатчиковый), которая возникает в двигателе при его вращении.
Бездатчиковое управление:
Существуют бесколлекторные двигатели без каких либо датчиков положения. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на свободной фазе. Мы помним, что в каждый момент времени к одной из фаз (А) подключен «+» к другой (В) «-» питания, одна из фаз остается свободной. Вращаясь, двигатель наводит ЭДС (т.е. в следствии закона электромагнитной индукции в катушке образуется индукционный ток) в свободной обмотке. По мере вращения напряжение на свободной фазе (С) изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора.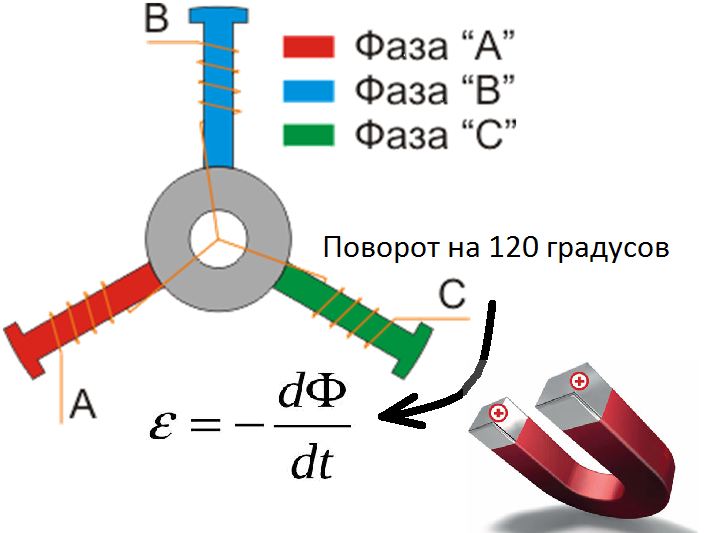
Что бы измерить это напряжение изпользуется метод «виртуальной точки». Суть заключается в том, что, зная сопротивление всех обмоток и начальное напряжение, можно виртуально «переложить провод» в место соединения всех обмоток: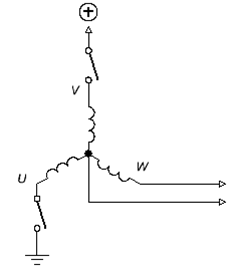
Регулятор скорости бесколлекторного двигателя:
Бесколлекторный двигатель без электроники — просто железка, т.к. при отсутствии регулятора, мы не можем просто подключить напряжение на него, чтоб он просто начал нормальное вращение. Регулятор скорости — это довольно сложная система радиокомпонентов, т.к. она должна:
1) Определять начальное положение ротора для запуска электродвигателя
2) Управлять электродвигателем на низких скоростях
3) Разгонять электродвигатель до номинальной (заданной) скорости вращения
4) Поддерживать максимальный момент вращения
Видео:Как работают бесколлекторные ЭЛЕКТРОДВИГАТЕЛИ? Вентильный двигатель. Понятное объяснение!Скачать

Принципиальная схема регулятора скорости (вентильная):
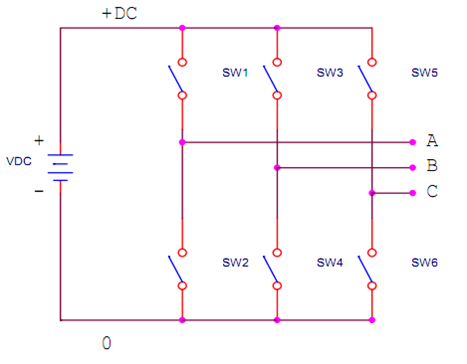
Бесколлекторные двигатели были придуманы на заре появления электричества, однако систему управления к ним никто не мог сделать. И только с развитием электроники: с появлением мощных полупроводниковых транзисторов и микроконтроллеров, бесколлекторные двигатели стали применятся в быту (первое промышленное использование в 60-х годах).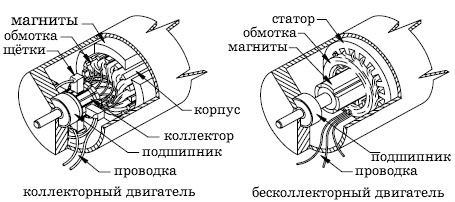
Читайте также: Датчики температуры 126 мотор
Достоинства и недостатки бесколлекторных двигателей:
Достоинства:
-Частота вращения изменяется в широком диапазоне
-Возможность использования во взрывоопасной и агрессивной среде
-Большая перегрузочная способность по моменту
-Высокие энергетические показатели (КПД более 90 %)
-Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов

Недостатки:
-Относительно сложная система управления двигателем
-Высокая стоимость двигателя, обусловленная использованием дорогостоящих материалов в конструкции ротора (магниты, подшипники, валы)
Разобравшись с теорией, перейдем к практике: спроектируем и сделаем двигатель для пилотажной модели МХ-2.
Список материалов и оборудования:
1) Проволока (взятая из старых трансформаторов)
2) Магниты (купленные в интернете)
3) Статор (барашек)
4) Вал
5) Подшипники
6) Дюралюминий
7) Термоусадка
8) Доспуп к неограниченному техническому хламу
9) Доступ к инструментам
10) Прямые руки ?
Ход работы:
1) С самого начала решаем:
Для чего делаем двигатель?
На что он должен быть рассчитан?
В чем мы ограничены?
В моем случае: я делаю двигатель для самолета, значит пускай он будет внешнего вращения; рассчитан он должен на то, что он должен выдать 1400 грамм тяги при трех-баночном аккумуляторе; ограничен я в весе и в размере. Однако с чего же начать? Ответ на этот вопрос прост: с самой трудной детали, т.е. с такой детали, которую легче просто найти, а все остальное подгонять под неё. Я так и поступил. После многих неудачных попыток сделать статор из листовой мягкой стали, мне стало понятно, что лучше найти её. Нашел я её в старой видеоголовке от видеорекоудора.
2) Обмотка трехфазного бесколлекторного двигателя выполняется изолированным медным проводом, от сечения которого зависит значение силы тока, а значит и мощность двигателя. Незабываем что, чем толще проволока, тем больше оборотов, но слабее крутящий момент. Подбор сечения:
1А — 0.05мм; 15А — 0.33мм; 40А — 0.7мм
Видео:Уроки Arduino - управление бесколлекторным моторомСкачать

3А — 0.11мм; 20А — 0.4мм; 50А — 0.8мм
10А — 0.25мм; 30А — 0.55мм; 60А — 0.95мм

3) Начинаем наматывать на полюса проволоку. Чем больше витков (13) намотано на зуб, тем большее магнитное поле. Чем сильнее поле, тем больший крутящий момент и меньшее количество оборотов. Для получения высоких оборотов, необходимо мотать меньшее количество витков. Но вместе с этим падает и крутящий момент. Для компенсации момента, обычно на мотор подают более высокое напряжение.
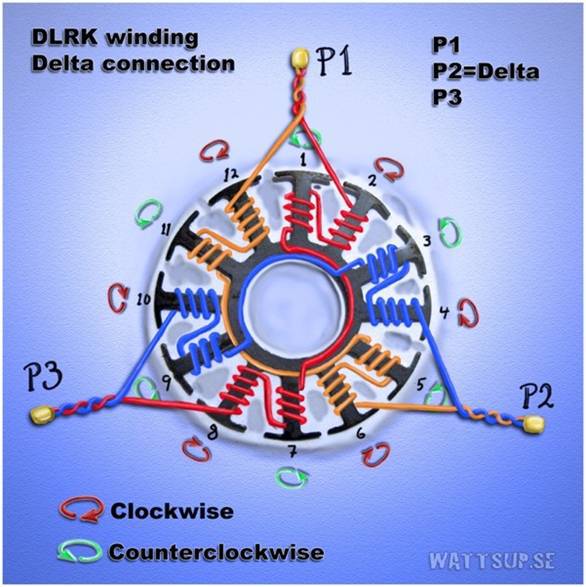
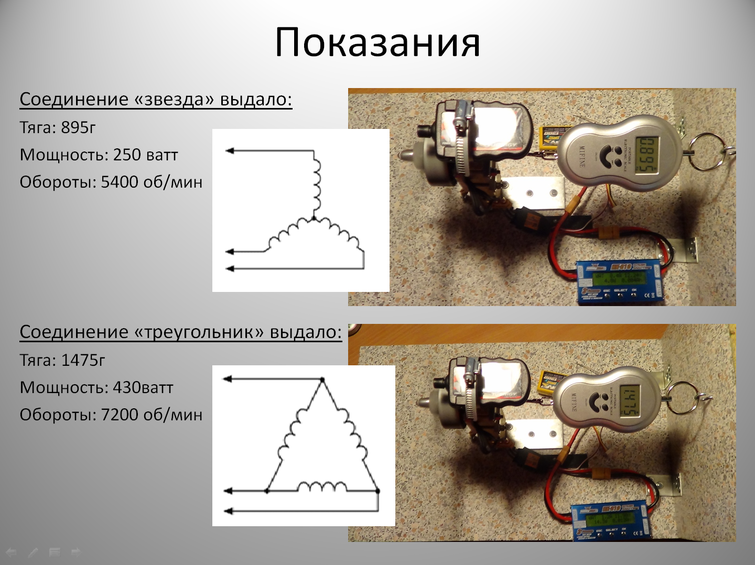
4) Дальше выбираем способ соединения обмотки: звездой или треугольником. Соединение звездой дает больший крутящий момент, но меньшее количество оборотов, чем соединение треугольником в 1.73 раз. (впоследствии было выбрано соединение треугольник)

5) Выбираем магниты. Количество полюсов на роторе должно быть четным (14). Форма применяемых магнитов обычно прямоугольная. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. Также чем больше количество полюсов, тем больше момент, но меньше оборотов. Магниты на роторе закрепляются с помощью специального термоклея.
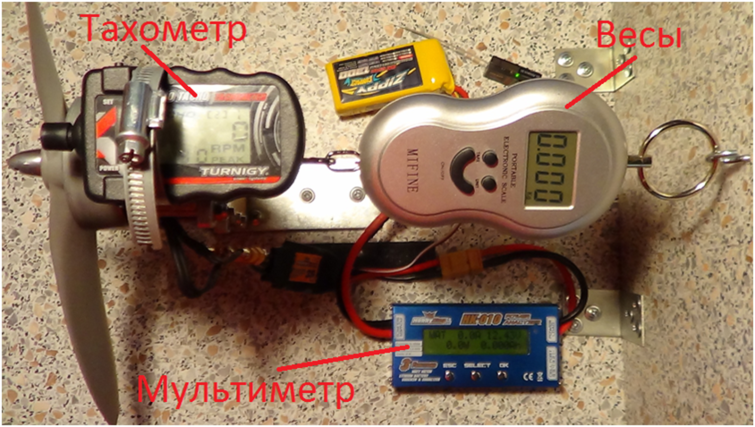
Испытания данного двигателя я проводил на созданной мной витномоторной установке, которая позволяет измерить тягу, мощность и обороты двигателя.
Читайте также: Куда заливать масло в редукторе лодочном моторе
Видео:Характеристики двигателей RC моделей. Электромотор. Щёточные и бесщёточные моторы. ESC. Что такое KVСкачать

Чтобы увидеть отличия соединений «звезда» и «треугольник» я соединял по разному обмотки:

В итоге получился двигатель соответствующий характеристикам самолета, масса которого 1400 грамм.
Характеристики полученного двигателя:
Потребляемый ток: 34.1А
Ток холостого хода: 2.1А
Сопротивление обмоток: 0.02 Ом
Количество полюсов: 14
Обороты: 8400 об/мин
Видеоотчет испытания двигателя на самолете. Мягкой посадки ?
Расчет КПД двигателя: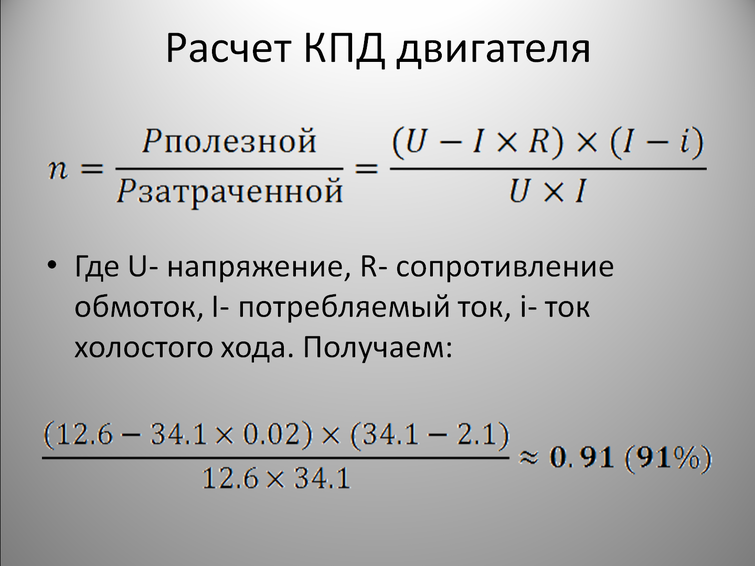
Очень хороший показатель. Хотя можно было еще выше добиться. 
Выводы:
1) У бесколлекторных двигателей высокая эффективность и КПД
2) Бесколлекторные двигатели компактны
3) Бесколлекторные двигатели можно использовать во взрывоопасных средах
4) Соединение звездой дает больший крутящий момент, но меньшее количество оборотов в 1.73 раза, чем соединение треугольником.
Таким образом, изготовить собственный бесколлекторный мотор для пилотажной модели самолета- задача выполнимая
Если у вас есть вопросы или вам что-то не понятно, задавайте мне вопросы в комметариях этой статьи. Удачи всем)
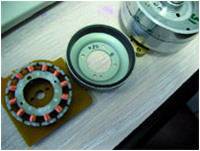
Создание и тестирование бесколлекторного мотора
В этой статье мы хотели бы рассказать о том, как мы с нуля создали электрический мотор: от появления идеи и первого прототипа до полноценного мотора, прошедшего все испытания. Если данная статья покажется вам интересной, мы отдельно, более подробно, расскажем о наиболее заинтересовавших вас этапах нашей работы.
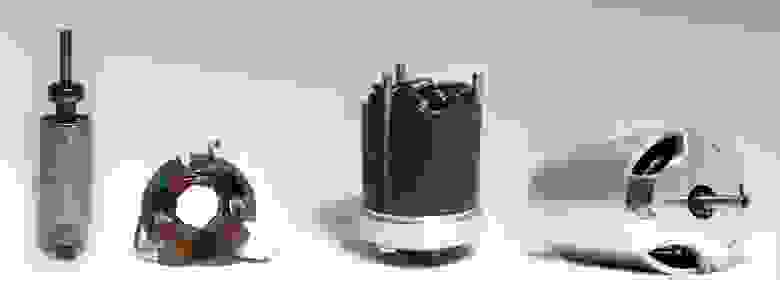
На картинке слева направо: ротор, статор, частичная сборка мотора, мотор в сборе
Вступление
Электрические моторы появились более 150 лет назад, однако за это время их конструкция не претерпела особых изменений: вращающийся ротор, медные обмотки статора, подшипники. С годами происходило лишь снижение веса электромоторов, увеличение КПД, а также точности управления скоростью.
Видео:БЕСКОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ. Как работает? Чем отличаться от щёточного? #бесколлекторный #МОТОРСкачать

Сегодня, благодаря развитию современной электроники и появлению мощных магнитов на основе редкоземельных металлов, удаётся создавать как никогда мощные и в то же время компактные и легкие “Бесколлекторные” электромоторы. При этом, благодаря простоте своей конструкции они являются наиболее надежными среди когда-либо созданных электродвигателей. Про создание такого мотора и пойдет речь в данной статье.
Описание мотора
В “Бесколлекторных моторах” отсутствует знакомый всем по разборке электроинструмента элемент “Щетки”, роль которых заключается в передаче тока на обмотку вращающегося ротора. В бесколлекторных двигателях ток подается на обмотки не-двигающегося статора, который, создавая магнитное поле поочередно на отдельных своих полюсах, раскручивает ротор, на котором закреплены магниты.
Первый такой мотор был напечатан нами 3D принтере как эксперимент. Вместо специальных пластин из электротехнической стали, для корпуса ротора и сердечника статора, на который наматывалась медная катушка, мы использовали обычный пластик. На роторе были закреплены неодимовые магниты прямоугольного сечения. Естественно такой мотор был не способен выдать максимальную мощность. Однако этого хватило, что бы мотор раскрутился до 20к rpm, после чего пластик не выдержал и ротор мотора разорвало, а магниты раскидало вокруг. Данный эксперимент сподвиг нас на создание полноценного мотора.
Узнав мнение любителей радиоуправляемых моделей, в качестве задачи, мы выбрали мотор для гоночных машинок типоразмера “540”, как наиболее востребованного. Данный мотор имеет габариты 54мм в длину и 36мм в диаметре.
Ротор нового мотора мы сделали из единого неодимового магнита в форме цилиндра. Магнит эпоксидкой приклеили на вал выточенный из инструментальной стали на опытном производстве.
Читайте также: Болотный мотор для лодки

Статор мы вырезали лазером из набора пластин трансформаторной стали толщиной 0.5мм. Каждая пластина затем была тщательно покрыта лаком и затем из примерно 50 пластин склеивался готовый статор. Лаком пластины покрывались чтобы избежать замыкания между ними и исключить потери энергии на токах Фуко, которые могли бы возникнуть в статоре.

Корпус мотора был выполнен из двух алюминиевых частей в форме контейнера. Статор плотно входит в алюминиевый корпус и хорошо прилегает к стенкам. Такая конструкция обеспечивает хорошее охлаждение мотора.

Измерение характеристик
Для достижения максимальных характеристик своих разработок, необходимо проводить адекватную оценку и точное измерение характеристик. Для этого нами был спроектирован и собран специальный диностенд.

Видео:Принцип работы двигателя. 4-х тактный двигатель внутреннего сгорания (ДВС) в 3DСкачать

Основным элементом стенда является тяжёлый груз в виде шайбы. Во время измерений, мотор раскручивает данный груз и по угловой скорости и ускорению рассчитываются выходная мощность и момент мотора.
Для измерения скорости вращения груза используется пара магнитов на валу и магнитный цифровой датчик A3144 на основе эффекта холла. Конечно, можно было бы измерять обороты по импульсам непосредственно с обмоток мотора, поскольку данный мотор является синхронным. Однако вариант с датчиком является более надёжным и он будет работать даже на очень малых оборотах, на которых импульсы будут нечитаемы.
Кроме оборотов наш стенд способен измерять ещё несколько важных параметров:
- ток питания (до 30А) с помощью датчика тока на основе эффекта холла ACS712;
- напряжение питания. Измеряется непосредственно через АЦП микроконтроллера, через делитель напряжения;
- температуру внутри/снаружи мотора. Температура измеряется посредством полупроводникового термосопротивления;
Для сбора всех параметров с датчиков и передачи их на компьютер используется микроконтроллер серии AVR mega на плате Arduino nano. Общение микроконтроллера с компьютером осуществляется посредством COM порта. Для обработки показаний была написана специальная программа записывающая, усредняющая и демонстрирующая результаты измерений.

В результате наш стенд способен измерять в произвольный момент времени следующие характеристики мотора:
- потребляемый ток;
- потребляемое напряжение;
- потребляемая мощность;
- выходная мощность;
- обороты вала;
- момент на валу;
- КПД;
- мощность уходящая в тепло;
- температура внутри мотора.
Видео демонстрирующее работу стенда:
Результаты тестирования
Для проверки работоспособности стенда мы сначала испытали его на обычном коллекторном моторе R540-6022. Параметров для этого мотора известно достаточно мало, однако этого хватило, чтобы оценить результаты измерения, которые получились достаточно близкими к заводским.
Затем уже был испытан наш мотор. Естественно он смог показать лучшее КПД(65% против 45%) и при этом больший момент(1200 против 250 г на см), чем обычный мотор. Измерение температуры тоже дало достаточно хорошие результаты, во время тестирования мотор не нагревался выше 80 градусов.
Но на данный момент измерения пока не окончательны. Нам не удалось измерить мотор в полном диапазоне оборотов из-за ограничения мощности источника питания. Также предстоит сравнить наш мотор с аналогичными моторами конкурентов и испытать его “в бою”, поставив на гоночную радиоуправляемую машину и выступить на соревнованиях.
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала
Видео:Бесколлекторный радиальный электродвигатель из болта своими рукамиСкачать

🌟 Видео
Схема подключения радио управляемой моделиСкачать
Физичка:Вечного двигателя не существует! Даник на последней парте!Скачать
Обзор «130 класс» электродвигателяСкачать
Переделка шагового униполярного в биполярный двигательСкачать
Перемотка БК мотора. RC LIFEСкачать
Роторный ДВС. Принцип работы и основы строения. 3D анимацияСкачать
Как увеличить обороты и мощность коллекторного двигателяСкачать
Модели электродвигателя в Matlab/SimulinkСкачать
Методика подбора электродвигателя для авиамодели.Скачать
Как работает двигатель внутреннего сгорания автомобиля?Скачать
Асинхронные и Синхронные двигатели и генераторы. Мощный #энерголикбез ПЕРСПЕКТИВЫ ЭЛЕКТРОДВИГАТЕЛЕЙСкачать
Бесколлекторный радиальный электродвигатель из болта своими руками (ЧАСТЬ#2!)Скачать
Виды электросистем для RC моделей. Что выбрать?Скачать
РЕГУЛИРУЙ ЭТО. Регуляторы оборотов для радиомоделей.Скачать














