Подключите сигнальные контакты радиоприемника «S» (сигнал) c контактыми «S» на входы APM, используя для этого специальный кабель. Если у Вас имеется трехжильный кабель, то первый канал приемника и APM необходимо подключить именно им, это даст возможность запитать радиоприемник, а остальные канали можно подключить только контактом «S», это даст небольшое преимущество компактности и веса. ссылка на подробности Power и важных предупреждений.
Если вы желаете использовать PPM сигнал , то вам необходимо перемычкой замкнуть 2 и 3 сигнальные каналы на APM и по первому каналу подать PPM сигнал из радиоприемника.
- Подключение RC выходы к Motors
- Последовательность подключения моторов к ArduPilot Mega
- Определение стороны кручения пропеллеров
- Простой способ проверки направления вращения двигателей
- Проверка направления вращения двигателя с помощью интерфейса командной строки
- Часть 6. Подключение элементов квадрокоптера
- Подключение силовых цепей
- Подключение регуляторов к DJI NAZA
- Подключение приемника
- Подключение двигателей
- Подсветка
- Первоначальные настройки
- СРЕДНИЙ
- Первоначальные настройки
- Первоначальные настройки для квадрокоптера
- Все сделали? Тогда готовтесь к первому полёту.
- Инструкция по сборке квадрокоптера
- Соберите раму
- Проводка
- Включение квадрокоптера
- Подключите ESCs и двигатели
- Лучшие практики
- Подключение радиоприемника и моторов
- Подключение входов радиоприемника
- Подключение RC выходы к Motors
- Последовательность подключения моторов к ArduPilot Mega
- Определение стороны кручения пропеллеров
- Простой способ проверки направления вращения двигателей
- Проверка направления вращения двигателя с помощью интерфейса командной строки
- Установка и подключение GPS приемника
- Советы по установке модуля GPS
- Установка модуля GPS + компас
- Подключение к АРМ 2.6
- Монтаж модуля GPS
- Настройка в Mission Planner
- Подключение к APM 2.5.2 / APM 2.5 / APM 2.0
- Светодиодные индикаторы
- Гашения вибрации и изоляция полетного контроллера APM
- Почему важно гашение колебаний:
- Измерте свои уровни вибрации:
- Проверьте двигатели на раме, пропеллеры и их соеденители:
- Изолируйте APM от рамы:
- Du-Bro пена
- Гелевые подушечки
- Уплотнительное кольцо Подвеска Гора:
- Беруш Гора
- Лампа демпфер + беруш 0,05 G Ultra Low Vibration Гора
- Отлично 3D Отпечатано Антивибрационная платформа
- Дополнительные соображения подавления вибраций
- Резюме конкретных характеристик вибрации, которые мы должны влажные:
- Примечание по терминологии:
- Ссылки на соответствующих обсуждений:
- Инструкция по установке ПО Mission Planner
- Загрузите последнюю версию ПО Mission Planner для установки
- Запустите установку
- Запустите Mission Planner
- Обновление ПО и проблемы при запуске
- Загрузка прошивки для АРМ
- Подключите APM к компьютеру
- Подключение APM к Mission Planner
- Выбераем прошивку
- Проверка
- Установка драйвера USB для полетного контроллера APM квадрокоптер
- Шаг первый: Установка драйвера APM-USB
- Обязательная настройка оборудования для APM
- Выберите тип рамы
- Калибровка компаса
- Калибровка акселерометра
- Калибровка радиоуправления
- Настройка дополнительного оборудования (опция)
- Калибровка регуляторов скорости моторов ESC
- О калибровке
- Калибровка «всех сразу» регуляторов ESC
- Видео, демонстрирующее процесс калибровки ESC:
- Руководство по калибровки «поочередная калибвровка ESC»
- Индивидуальная калибровка регуляторов ESC
- Тестирование
- Примечания / Поиск и устранение неисправностей
- Настройка моторов
- Проверка направление вращения двигателя
- Установите правильные направления вращения
- Выбор винтов
- Прикрепите винты
- Информация о LiPo батарях
- ВАЖНО! Зарядка и безопасность
- Вот несколько обязательных для исполнения указаний по зарядке LiPo батарей (Литий-полимерные батареи).
- Разъяснения по LiPo
- Напряжение и количество ячеек
- Понимание конвенций
- Какой lipo аккумулятор следует покупать?
Подключение RC выходы к Motors
Если у вас имеется распределительная плата питания PDB , то можно подключить питание и сигнальные кабели через неё.
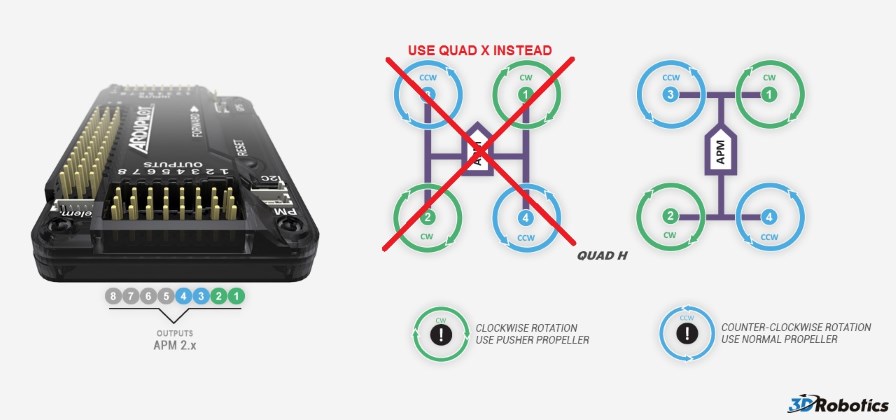
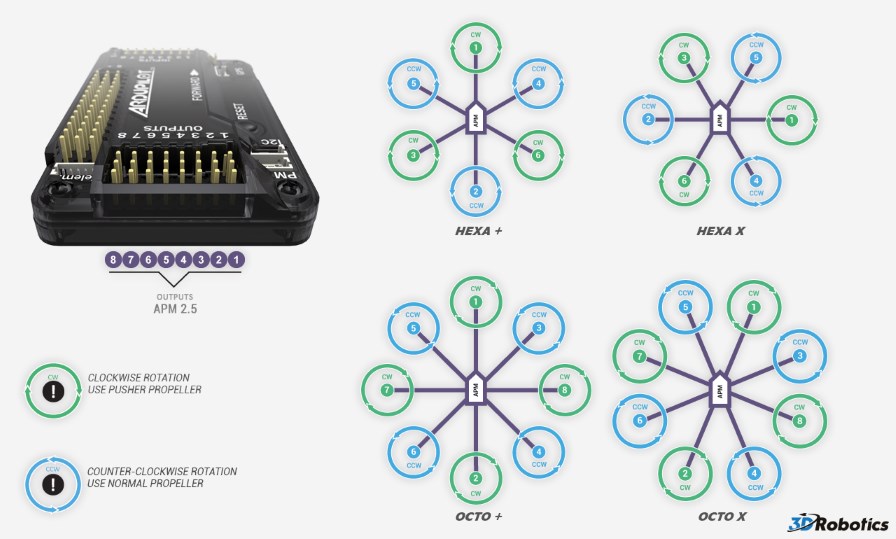
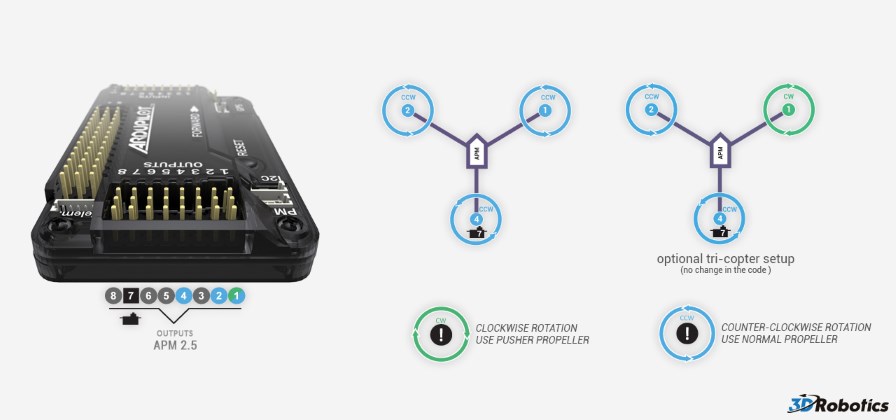
Последовательность подключения моторов к ArduPilot Mega
Определение стороны кручения пропеллеров
Совершенно очевидно , как показано ниже на картинке определить направление пропеллера для правильного соединения его к правильному двигателю. Задача состоит в том, что бы воздушный поток позволял квадрокоптеру отталкиваться от земли.
- Не все винты отмечены R или P, так что вам потребуется определить направление вращения, глядя на сам пропеллер.
- Есть два типа толкания воздушного потока — это пропеллеры типа CW (часового) и CCW (противочасового) вращения.
- Обратите внимание, пропеллеры выше имеют малую кривую на переднем крае по направлению вращения.
- Поэтому острее и как правило тоньше задняя кромка
- Это позволит вам определить правильное направление вращения пропеллеров
- Большинство «обычных» квадрокоптеров используют сьёмник в виде винта.
- На гексакоптерах, октакоптерах требуются более толкательные винты и малооборотистые моторы.
- Есть так же конфигурации более толкающих пропеллеров для нормальных Tri, Quad, Hex и октакоптеров.
Простой способ проверки направления вращения двигателей
Если вы завершили калибровку Радиоаппаратуры и регуляторов ESC , то вы можете проверить, что ваши моторы вращаются в правильном направлении: Примечание: Направление моторов устанавливается просто перестановкой двух из трех проводов от регулятора ESC.
- удерживая свой квадрокоптер на достаточно хорошем растоянии для безопасности, снимите его с охраны (arming) удерживая ручку газа до упора вправо в течение четырех секунд.
- Теперь аккуратно подайте газу, только немного, пока пропеллеры не начнут поворачиваться. Обратите внимание на направление каждого.
- Они должны соответствовать вращениям указаным на изображении рамы, которую вы выбрали
- Если двигатель вращается в неправильном направление — просто поменяйте два из трех проводов от регулятора ESC
Проверка направления вращения двигателя с помощью интерфейса командной строки
Альтернативный способ проверить, что двигатели были правильно подключили заключается в использовании команды «Motors» в CLI Mission Planner. Примечание: Направление моторов устанавливается просто перестановкой двух из трех проводов от регулятора ESC.
- Подключите APM к компьютеру с помощью мини-кабеля USB
- Подключите питание батареи
- Запустите Mission Planner и выберите Terminal, далее кнопку «Подключение к АРМ»
- В открывшемся окне терминала введите Test
- и введите тип теста motors
Теперь Двигатели будут вращаться в последовательности, каждый двигатель будет вращаться в течение 1 секунды при очень низкой скорости, а затем остановится. Вращение следующего двигателя начнется после 2 или 3 секундной задержки. Пожалуйста, соблюдайте направление вращения для каждого двигателя, а также, что двигатели вращаются один за другим.
Первый вращающийся двигатель будет тот , который расположен впереди в случае конфигурации +, или первым двигателем справа спереди в случае конфигурации X. Тест двигателей будет идти по часовой стрелке.
В случае конфигурации типа X8, квадрокоптер будет вращать сначало верхний передний правый двигател, затем нижний передний правый, и далее вокруг по часовой стрелке, по схеме.
После завершения теста вращения будет 4 или 5 секундная пауза до повтора.
Когда вы убедитесь , что тест проходит правильно:
- нажмите любую клавишу (этот процесс не остановится, пока не закончит текущую последовательность)
- отключите главный аккумулятор
- отсоедините USB-кабель
- Для любого двигателя вращается в неправильном направлении просто поменяйте любые два провода из регулятора ESC идущих на двигатель.
Часть 6. Подключение элементов квадрокоптера
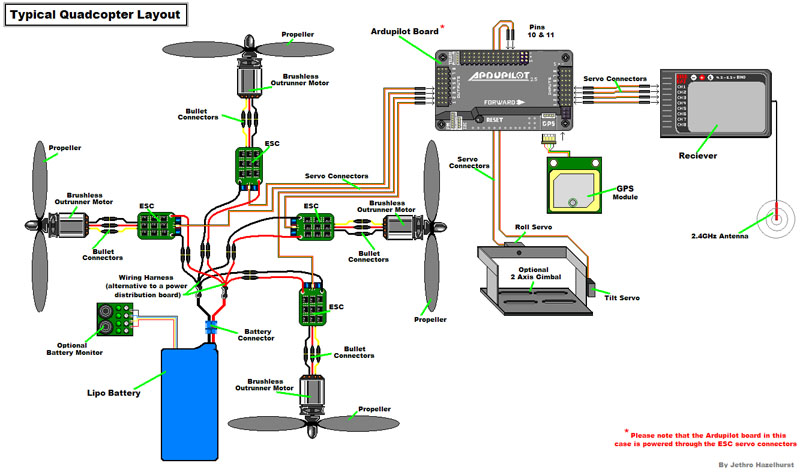
В этой статье мы постараемся осветить все тонкости подключения сигнальных и питающих цепей коптера. Это действительно важный порос с учетом того, что в нем сочетаются радиочастотные цепи и питающие токи в десятки ампер. Мы довольно условно нарисовали схему квадрокоптера со всеми электрическими связями. По крайней мере нашего коптера.
Далее подробно рассмотрим особенности подключения различных элементов.
Подключение силовых цепей
Питающие напряжение берется с аккумулятора. Самым простым и правильным способом является размещение на коптере ответного разъема, который в свою очередь подключен к потребителям.
Нет никакой нужды устанавливать на коптере выключатель питания. Во-первых, потому что понадобится огромный, тяжелый выключатель на несколько десятков ампер. Во-вторых, вы и так постоянно будете снимать и устанавливать аккумулятор.
Раньше мы в качетве минусового провода использовали раму коптера. Это не самый безопасный подход из-за повышения риска короткого замыкания. Сейчас у нас все цепи разведены проводами.
Аккумулятор должен быть подключен к регуляторам оборотов и полетному контроллеру (в случае использования DJI NAZA). Как это сделать качественно вопрос сложный. Мы считаем, что наилучший способ — это подведение каждого провода отдельно до разъема. Другими словами каждый регулятор должен иметь свой плюсовой и минусовой провод до разъема. Выглядит, конечно, ужасно, но работает отлично.Это нужно для того, чтобы исключить взаимных наводок по цепям питания. Понять откуда они берутся можно из этой статьи.
В продаже есть платы-дистрибьюторы питания, но мы считаем, что нет ничего лучше и надежней, чем хорошо спаянный и изолированный контакт:Подключение питания регуляторов
Также от разъема аккумулятора стоит вывести клеммник или другой запасной разъем. DJI NAZA имеет свой стабилизатор питания, который на нашем коптере подключен к этому клеммнику, но, даже если у вас другой контроллер, то все-равно стоит предусмотреть такой клеммник для питания подсветки или камеры.
Разъем питания контроллера
Подключение регуляторов к DJI NAZA
Регулятор для управления использует стандартный PDM-сигнал, как сервопривод. На контроллерах уже предусмотрены трехконтактные ответные разъемы. Надо понимать, что чаще всего регулятор является источником напряжения 5В. От этого напряжения можно запитать и контроллер, и приемник (если вы используете не NAZA). Причем, необходимо подключить питание только от одного регулятора, а в остальных вытащить этот контакт из разъема.
Если вы используете полетный контроллер DJI NAZA, то отключить все линии 5В, так как у него есть свой стабилизатор питания.Подключение приемника
В самом простом случае для управления коптером достаточно четырех каналов. Еще нужно подать питание на на приемник. Обычно для этого используют два трехжильных провода мама-мама. Мы решили пойти дальше и сделали специальную плату:
Плата для соединения приемника с полетным контроллером
Размеры этой платы подогнаны так, что приемник можно приклеить двусторонним скотчем сверху к NAZA и просто воткнуть плату для коммутации. Так гораздо аккуратней и надежней.
Файл печатной платы можно скачать здесь.
Подключение двигателей
Двигатели подключаются к регуляторам тремя силовыми проводами. Тут мало что можно добавить. Помните, что для изменения направления вращения достаточно поменять местами два любых провода.
Подсветка
Подсветка коптера на схеме не показана, но у нас уже была подробная статья о том, как ее лучше сделать.
Первоначальные настройки
СРЕДНИЙ
Первоначальные настройки
Первоначальные настройки для квадрокоптера
Выполните следующие действия для первой настройки квадрокоптера (arducopter) и не поленитесь посмотреть страницу безопасности .
- Инструкция по монтажу APM : Соберите ваш квадрокоптер, компоненты питания, провода и подключите АРМ и RC приемник.
- Монтаж вашего GPS или GPS с компасом
- Установка внешнего модуля компаса
- Гашение вибрации
- Инструкции по сборке рамы квадрокоптера
- Подключение радиоприемника к RC входам и моторов к выходам
Все сделали? Тогда готовтесь к первому полёту.
Инструкция по сборке квадрокоптера
Первым шагом в настройке квадрокоптера это сборка рамы и её компонентов. Эти инструкции дают указания по сборке и подключения квадрокоптера с APM автопилотом, включая передовую практику. Следующие подстраницы представляют более подробные инструкции по темам:
- Подключение радиопередатчика и моторов к вашему APM
- Виброгасящие демпфера
- Подключение и монтаж модуля GPS
- Подключение и монтаж комбинированного модуля GPS + компас
- Установка внешнего модуля компаса
- PX4 Инструкции по электропитанию
Соберите раму
Комплекты рам доступны в магазине. Выберите модель ниже, чтобы посмотреть инструкции по сборке. Помните не устанавливайте пропеллеры сразу; мы установим их после калибровки ESC (регуляторов мотора).
Проводка
Приведенная ниже схема показывает стандартный вариант подключения для АРМ квадрокоптер.

Для полного комплекта APM-Квадрокоптер необходимы следующие электронные компоненты:
- Автопилот с конфигурацией «квадрокоптер». В настоящее время поддерживает APM и PX4 автопилоты.
- Блок питания с LiPo батареи или эквивалентным методом питания (см. ниже)
- Распределитель питания (PDB) или эквивалент распределения мощности к двигателям
- Электронный регулятор скорости (ESC) для каждого двигателя
- Моторы
- RC приемник и передатчик
Включение квадрокоптера
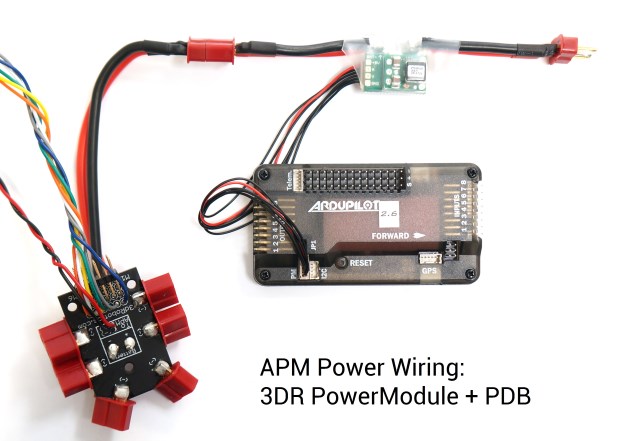
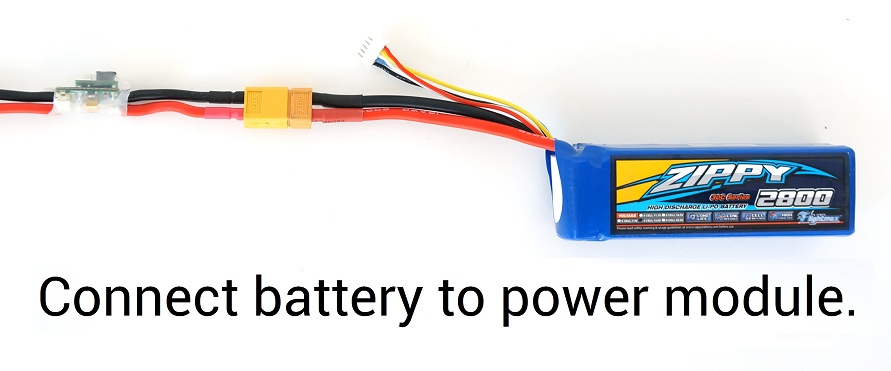
Самый простой способ включить квадрокоптер — использовать модуль питания с аккумулятором LiPo (см. Инф ). Для альтернативных методов питания вашего квадрокоптера, для плат APM 2.5 и 2.6 смотрите страницу (ссылка).
Для подключения модуля питания подключите силовые провода к распределительной плате PDB, а второй силовой провод к батарее или другому источнику питания. Подключите модуль питания к порту PM используя 6 проводной кабель.
Если Вы не используете модуль питания, то для подключения APM можно использовать внешний источник питания — UBEC. для этого подключите его к входам подключения моторов. Предупреждение: Так как регуляторы мотора в большинстве случаев уже имеют UBEC модуль, рекомендуется во избежание проблем не использовать их. Используйте внешний модуль питания в обход питания от регуляторов ESC.
Для этого на плате предусмотрен джампер JP1 расположены рядом с разхемами подключения моторов, используя внешний UBEC рекомендуется его удалить (снять перемычку), плату можно запитать через разъемы подключения приемника. Все это необходимо если вы не используете штатный модуль питания.
Подключите ESCs и двигатели
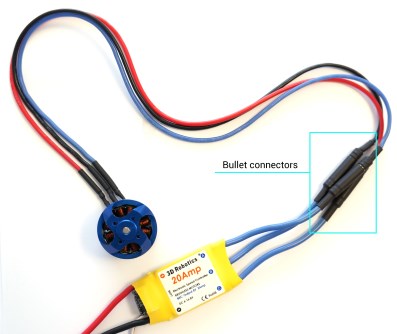
Подключите кабели двигателя с электронным регулятором скорости (ESC) штепсельных соединений. Каждый двигатель должен подключиться только к одному ESC.
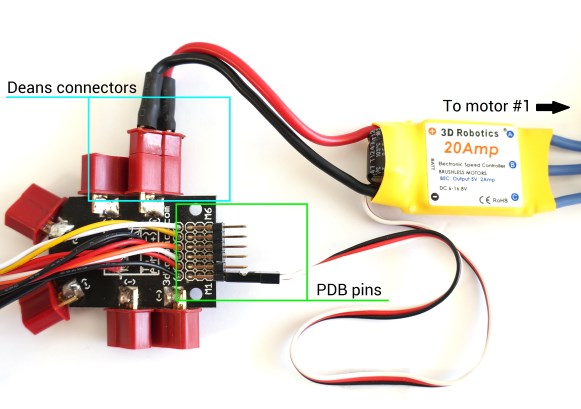
Подключите разъемы питания регуляторов ESC в распределительную плату (PDB). Подключите трехжильный сигнальный провод от регулятора ESC к рапределительной плате питания PDB, согласно нумерования конфигурации моторов. т.е. первый мотор в разъем 1 , второй — в разъем 2 и так далее. Если вы не используете распределительную плату, допускается подключение непосредственно прямо к разъемам APM — Output Pins Предупреждение:В зависимости от схемы питания рекомендуется питать плату внешним UBEC, вместо встроенного в регулятор ESC. Удалите джампер JP1 если он присествует для питания внешним UBEC.
Лучшие практики
При сборке квадрокоптера, мы рекомендуем использовать резьбовые винты. Так же потребуется специальное средство для лучшего закрепления болтов, которое не даст им раскрутиться. При закреплении проводов питания держите положительный и отрицательной вместе к друг другу, можно использовать стяжки. Что бы обеспечить проводку по раме можно использовать кабельную сетку, где это возможно. Используйте гашение вибрации там, где это возможно, за дополнительной информацией посетите страницу по изоляции.
Инструкция для подключения радиоприемника и двигателей к АРМ можно найти на странице .
- Предупреждение! В любом режиме удержания высоты которые: : Alt-Hold, Loiter, AUTO, AutoLand или RTL если полет квадрокоптера становиться неустойчивой, при посадке или близком нахождением к земле — (а так же при автоматической посадки) вы вероятно не правильно установили полетный контроллер — это влияет на барометр (высотометр), который зависит от давления создаваемового самим квадрокоптером и его воздушным потоком.
- В этом можно убедиться посмотрев на журнал показания высотомера видя, что показания колеблятся, когда он у земли.
- Если это является проблеммой , переместите контроллер полета или оградите его от проветривания корпуса.
- Успешность летных испытаний может быть проверена по результатам журналов.
- Это предупреждение находится здесь, так что у вас есть возможность не допускать этого в первую очередь.
- Как правило, лучше установить контроллер на верхней части квадрокоптера.
- Если у вас имеется крышка которая закрывает полетный контроллер, убедитесь, что она не вентилируется от пропеллеров и в ней не создается давление.
Подключение радиоприемника и моторов
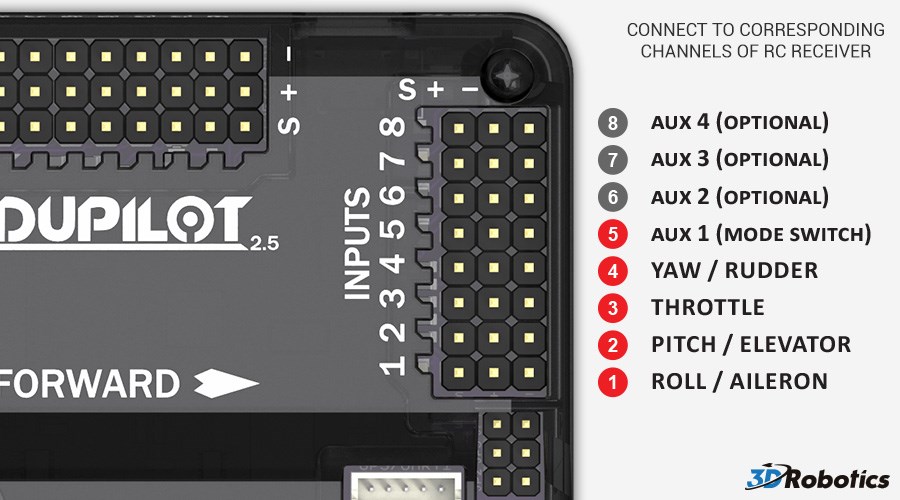
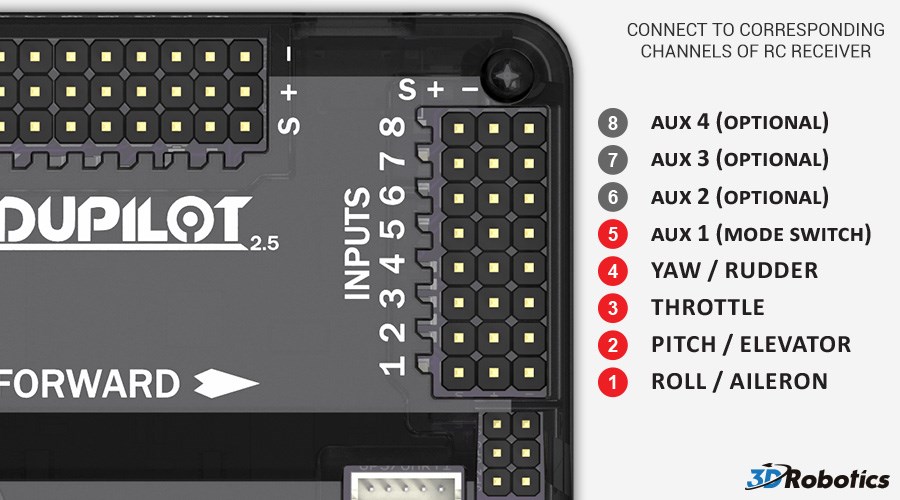
Подключение входов радиоприемника
Подключите сигнальные контакты радиоприемника «S» (сигнал) c контактыми «S» на входы APM, используя для этого специальный кабель. Если у Вас имеется трехжильный кабель, то первый канал приемника и APM необходимо подключить именно им, это даст возможность запитать радиоприемник, а остальные канали можно подключить только контактом «S», это даст небольшое преимущество компактности и веса. ссылка на подробности Power и важных предупреждений.
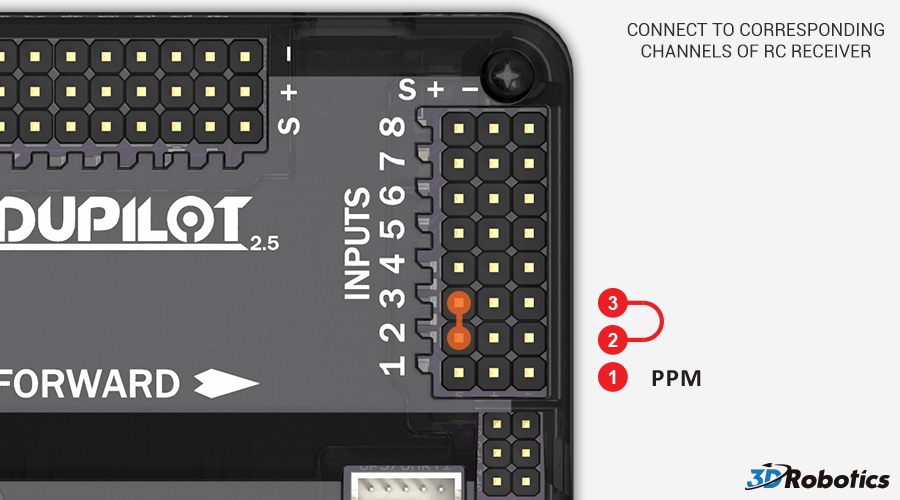
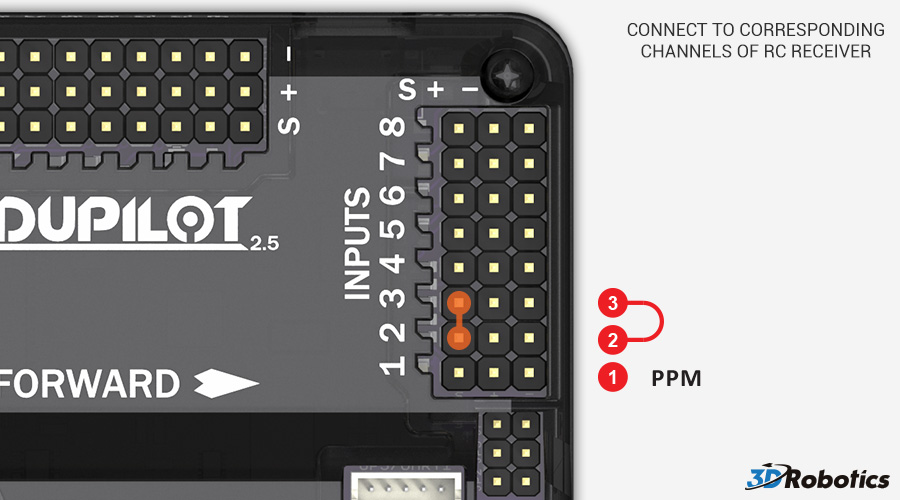
Если вы желаете использовать PPM сигнал , то вам необходимо перемычкой замкнуть 2 и 3 сигнальные каналы на APM и по первому каналу подать PPM сигнал из радиоприемника.
Подключение RC выходы к Motors
Если у вас имеется распределительная плата питания PDB , то можно подключить питание и сигнальные кабели через неё.
Последовательность подключения моторов к ArduPilot Mega
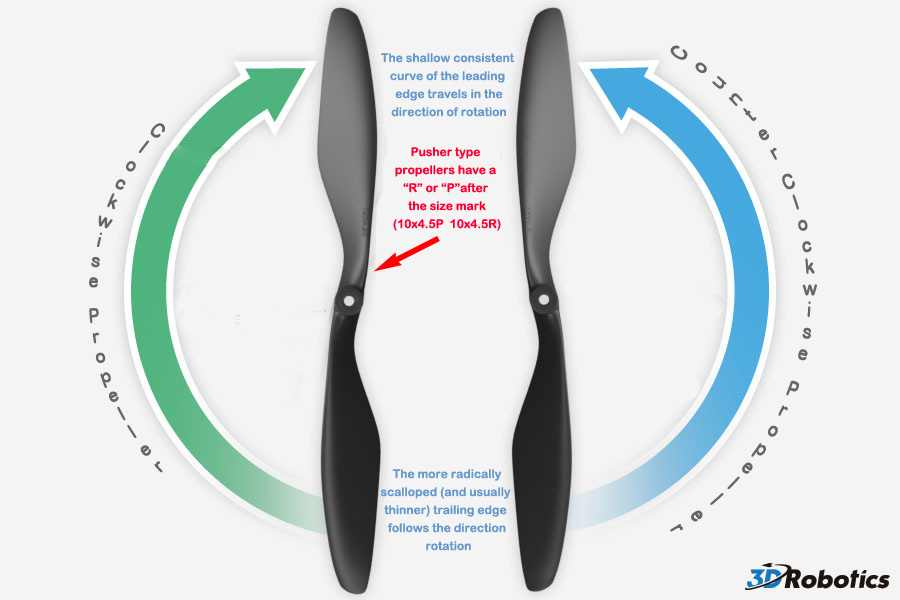
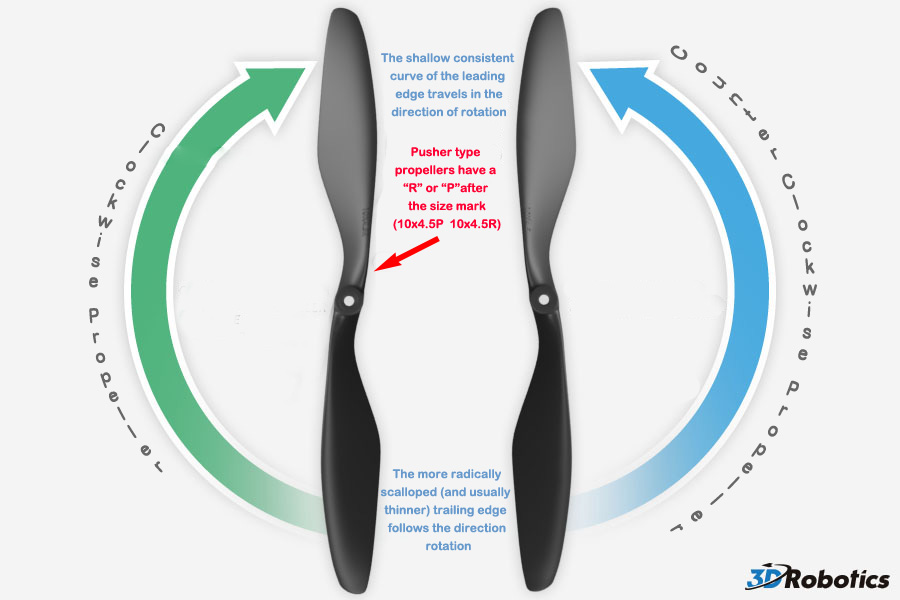
Определение стороны кручения пропеллеров
Совершенно очевидно , как показано ниже на картинке определить направление пропеллера для правильного соединения его к правильному двигателю. Задача состоит в том, что бы воздушный поток позволял квадрокоптеру отталкиваться от земли.
- Не все винты отмечены R или P, так что вам потребуется определить направление вращения, глядя на сам пропеллер.
- Есть два типа толкания воздушного потока — это пропеллеры типа CW (часового) и CCW (противочасового) вращения.
- Обратите внимание, пропеллеры выше имеют малую кривую на переднем крае по направлению вращения.
- Поэтому острее и как правило тоньше задняя кромка
- Это позволит вам определить правильное направление вращения пропеллеров
- Большинство «обычных» квадрокоптеров используют сьёмник в виде винта.
- На гексакоптерах, октакоптерах требуются более толкательные винты и малооборотистые моторы.
- Есть так же конфигурации более толкающих пропеллеров для нормальных Tri, Quad, Hex и октакоптеров.
Простой способ проверки направления вращения двигателей
Если вы завершили калибровку Радиоаппаратуры и регуляторов ESC , то вы можете проверить, что ваши моторы вращаются в правильном направлении: Примечание: Направление моторов устанавливается просто перестановкой двух из трех проводов от регулятора ESC.
- удерживая свой квадрокоптер на достаточно хорошем растоянии для безопасности, снимите его с охраны (arming) удерживая ручку газа до упора вправо в течение четырех секунд.
- Теперь аккуратно подайте газу, только немного, пока пропеллеры не начнут поворачиваться. Обратите внимание на направление каждого.
- Они должны соответствовать вращениям указаным на изображении рамы, которую вы выбрали
- Если двигатель вращается в неправильном направление — просто поменяйте два из трех проводов от регулятора ESC
Проверка направления вращения двигателя с помощью интерфейса командной строки
Альтернативный способ проверить, что двигатели были правильно подключили заключается в использовании команды «Motors» в CLI Mission Planner. Примечание: Направление моторов устанавливается просто перестановкой двух из трех проводов от регулятора ESC.
- Подключите APM к компьютеру с помощью мини-кабеля USB
- Подключите питание батареи
- Запустите Mission Planner и выберите Terminal, далее кнопку «Подключение к АРМ»
- В открывшемся окне терминала введите Test
- и введите тип теста motors
Теперь Двигатели будут вращаться в последовательности, каждый двигатель будет вращаться в течение 1 секунды при очень низкой скорости, а затем остановится. Вращение следующего двигателя начнется после 2 или 3 секундной задержки. Пожалуйста, соблюдайте направление вращения для каждого двигателя, а также, что двигатели вращаются один за другим.
Первый вращающийся двигатель будет тот , который расположен впереди в случае конфигурации +, или первым двигателем справа спереди в случае конфигурации X. Тест двигателей будет идти по часовой стрелке.
В случае конфигурации типа X8, квадрокоптер будет вращать сначало верхний передний правый двигател, затем нижний передний правый, и далее вокруг по часовой стрелке, по схеме.
После завершения теста вращения будет 4 или 5 секундная пауза до повтора.
Когда вы убедитесь , что тест проходит правильно:
- нажмите любую клавишу (этот процесс не остановится, пока не закончит текущую последовательность)
- отключите главный аккумулятор
- отсоедините USB-кабель
- Для любого двигателя вращается в неправильном направлении просто поменяйте любые два провода из регулятора ESC идущих на двигатель.
Установка и подключение GPS приемника
Эта страница об устанокве GPS без компаса на борту, для GPS с компасом следуйте инструкциям, приведенным на следующей странице .
Советы по установке модуля GPS
- Для модулей без компаса на борту, ориентация не имеет значения, пока антенна вверх
- GPS должен быть на открытом пространстве и не быть под пропеллерами
- Он должен быть установлен как можно дальше от всей электроники: телеметрии, видео-радио передатчиков, двигатели и их регуляторов.
Ниже приведены пример монтажные позиции для квадрокоптеров.
Установка модуля GPS + компас
Эта страница покрывает установку модуля GPS + Компас. Если вы устанавливаете GPS без бортового компаса следуйте инструкциям, приведенным на предыдущей странице. Для получения инструкций по установке автономного компас следуйте инструкциям далее .
Читайте также: Крышки для моторов ваз 2115
Модуль GPS + компас работает с текущей версией АРМ: самолета, APM: машинка и APM: квадрокоптер. (но не работает с версией 2.91b и ранней АРМ: квадрокоптер). Кабеля для подключения модуля входят в комплект , это позволит подключить его к APM.
фото 3DR uBlox GPS с компасом GPS + порт и МАГ компас GPS порт
Подключение к АРМ 2.6
Модуль GPS с бортовым компасом совместим с APM 2.6 и включает в себя кабели. Для подключения модуля GPS для APM 2.6, подключите GPS порт к порту APM GPS и подключите провод компаса порт в APM I2C.
фото подключения Подключите GPS к АРМ 2.6.
Монтаж модуля GPS
Этот модуль устанавливается отдельно от полетного контроллера APM, что бы он мог лучше видеть небо и позволял компасу дистанцироваться от вмешательства магнитных полей создаваемые другой электроникой.
При монтаже модуля GPS + компас:
- Поместите модуль на внешней стороне вашего аппарата (в поднятом положении при необходимости) с четкой видимостью неба, насколько это возможно от двигателей и их регуляторво (ESC), с направлением стрелки вперед.
- Как можно дальше от силовых проводов бортового питания на несколько сантиметров.
- Устанавливайте модуль как можно дальше от железосодержащих предметов. Используйте немагнитные соединения нейлона или крепление из нержавеющей стали.
- Скручивайте провода питания и заземления, где это возможно.
Настройка в Mission Planner
Примечание: Если GPS c компасом установлен в правильном направлении (стрелка, указывающая вперед) и направление полетного контроллера APM также установлена в правильную сторону с его стрелкой, указывающей вперед, параметр (COMPASS_ORIENT) необходимо будет установлен в (Roll 180 ) или «8», потому что компас стоит под GPS модулем.
- Запустите Mission Planner и подключите полетный контроллер проводом USB , нажмите «Connect»
- Выберите вкладку «Оборудование», затем выберите вкладку меню слева «Обязательное Оборудование», а затем выберите вкладку «Компас».
- Выберите стрелку вниз в ориентации компаса снести пункт и выберите пункт «ROTATION_ROLL_180».
Примечание: Если полетный контроллер ставиться в иной ориентации, Ориентация (т.е. параметр COMPASS_ORIENT) должен быть установлен в соответствии с отношением GPS-х до контроллера полета. Так например, если полетный контроллер APM 2.6 и GPS + компас модуль были установлены на нижней части аппарата , то вы выбрали бы ориентацию компаса как ROTATION_ROLL_180. Однако, если вы хотели смонтировать GPS + компас правой стороной вверх вы выберете «Ориентация» «ROTATION_NONE» потому что оригинальный угол был 180 градусов, затем добавить вращение компаса что является еще одним углов в 180 градусов = угол 360 градусов = без вращения.
Подключение к APM 2.5.2 / APM 2.5 / APM 2.0
Пожалуйста, следуйте инструкциям: как подключить внешний компас в APM2.5 и APM2.0 .
Примечание: после подключения внешнего компас вам понадобится заново делать Живую Калибровку (Live Calibrating) и Compassmot (если бы вы запустить эту процедуру для внутреннего компаса)
Светодиодные индикаторы
Модуль GPS c компасом в зависимости от модификации имеет два светодиодных индикатора: один отвечает за питание (постоянно горит) и второй для фиксирования спутников GPS (мигает).
Светодиоды Поведение Питание Горит постоянно Фиксирование спутников Моргает Гашения вибрации и изоляция полетного контроллера APM
Почему важно гашение колебаний:
- На плате APM есть акселерометры, которые чувствительны к вибрациям.
- Прошивка APM: квадрокоптер сочетает в себе данные из этих акселерометров с барометром и данных GPS для расчета и оценки своей позиции.
- Оценка этой позиции имеет решающее значение, когда используется режимы: AltHold, Loiter, RTL, Guided и AUTO
- При сильной вибрации, оценка данных может быть искажена и может привести к очень плохим поведением в этих режимах (квадрокоптер становиться нервным).
Измерте свои уровни вибрации:
- Вибрация должна быть менее 0,3 G в X и Y осей и менее 0,5 G в оси Z.
- Вы должны стремиться, чтобы получить +/- 1/10 G по всем осям, и постараться добиться этого.
- Пожалуйста, обратитесь к вики странице измерения вибраций , что бы понять, что они находятся в допустимых значениях
Проверьте двигатели на раме, пропеллеры и их соеденители:
У квадрокоптеров в основном вибрация идет от моторов и пропеллеров, которую можно значительно уменьшить:
- Рама , особенно её лучи являются основной причиной асинхронной вибрации, поэтому лучи должны быть как можно жесткими
- Рамы квадрокоптеров DJI и их хороших клонов имеют достаточно жесткие лучи.
- Лучи из Carbon fiber (углеродного волокна) имеют достаточно хорошие характеристики.
- Более тяжелые алюминиевые квадрокоптеры, как Arducopter, являются гибкими, более дешевые китайские — часто нет.
- Большинство коммерческих квадрокоптеров имеют литьевой экзоскелет или лучи, такие как IRIS или Phantom являются достаточно жесткими.
- Дешевые, легкие рамы, как правило, чтобы продемонстрировать более высокое качество сильно и тяжело загружают квадракоптер («Flexi» он получает).
- Мотор на раме и луч рамы должны быть безопасными и гибкими (иногда это проблема для карбоновых лучей).
- Двигатели должны работать бесперебойно (подшипники должны быть не изношенных и у них не должен быть «визг»).
- Пропеллерные переходники, соединяющие винты для двигателей должны быть концентрическими и очень прямыми.
- Винты должны быть полностью сбалансированы с помощью хорошей балансировки
- Балансированный двигатель (или очень хорошо сбалансированный двигатель, как T-Motor) может иметь большое влияние.
- Не правильные винты, которые не хорошо подобраны к раме и весу или не имеющие тот же тип вращения CCW и CW.
- Получите хорошие пропеллеры, новые APC винты являются хорошим выбором, как часто GemFan carbon пропеллеры.
- Carbon Fiber пропеллеры лучше, но основной компанией был Graupner ушедшей из бизнеса, теперь дешевые пропеллеры Carbon Fiber являются проблемой.
- Carbon fiber пропеллеры дорогие, жесткие, сильные и острые, как бритва — они являются одной из основных угрозой безопасности.
- Большие медленные пропеллеры, безусловно, вызывают более сильную вибрацию чем мелкие и быстрые, но большие медленные пропеллеры намного эффективные.
- Крупные, медленные пропеллеры также делают раму гибкой, поскольку двигатели будут крутить пропеллеры по оси.
- Если вы действительно хотите оптимизировать все вышеперечисленные характеристики, ваш полетный контроллер скорее всего нужно изолировать от вибрации.
Изолируйте APM от рамы:
- Двусторонняя лента или липучки традиционно используется для крепления APM/PX4 к раме.
- Во многих случаях лента или пена Velcro не обеспечивает адекватной виброизоляции, потому что масса контроллера полета на борту настолько мала.
- Есть четыре возможных альтернатив, которые были протестированы и показали лучшие результаты:
Du-Bro пена
- 1/4″ Du-Bro пены можно приобрести непосредственно у розничных торговцев радиоуправляемых моделей
- Использование Krazy Glue (или эквивалент), чтобы прикрепить пену на один из уровней рамки.
- Затем клей на нижнюю часть корпуса (APM/PX4, содержащий APM/PX4 конечно) непосредственно к пене.
- Клееный по методу Foam означает, что будет трудно удалить полетный контроллер.
- Вы можете приобрести дополнительный чехол или детали рамы , чтобы позволить вам установить полетный контроллер между рамами или использовать один из других методов.
- APM 2.5 и 2.6 можно отвинтить от верхней крышки и проклеить заднюю крышку.
Гелевые подушечки
1Положите виброгасящие гелевые подушечки (1 см
2 см) на каждом угле полетного контроллера. Возможные гели включают в себя:
- Kyosho Zeal Gel Tape вероятно, самым лучшим решением, теперь в наличии на Amazon, E-Bay.
- USA Силиконовый гель лента и колодки (V10Z62MGT5 лента рекомендуется)
- United Kingdom Silicone Gel Tape, Pads и втулки
- Moon Gel Pads (также доступны в музыкальных магазинах). Внимание: Moon Gel показал провал в тепле выше 100 градусов по Фаренгейту, так что его следует использовать с осторожностью.
1 см) в ширину липучку подпорный ремешок или резинку. Будьте осторожны, что ремень не удержит так надежно, это мешает затуханиям колодки. Рассмотрите вопрос о создании слоя мягкой пены между ремнем и полетным контроллером.
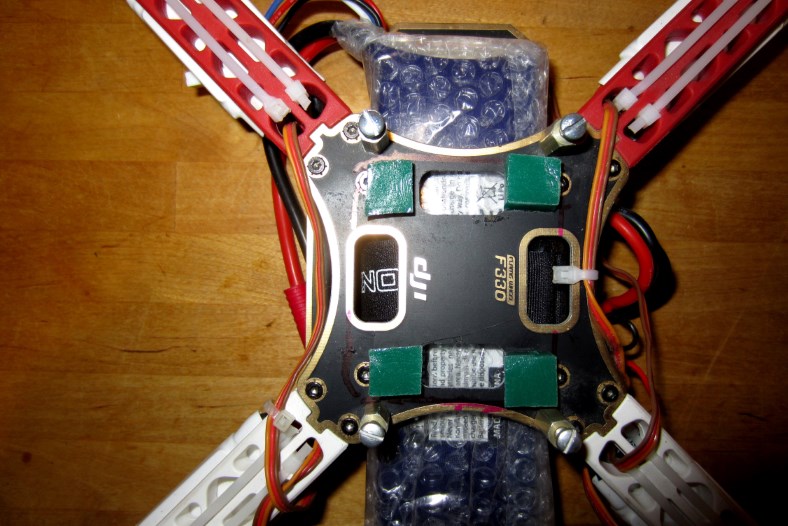
Рама F330 с Kyosho Zeal Pads
FlameWheel F330 С PX4 Установленный на промежуточном платформы
FlameWheel F330 С PX4 Установленный на промежуточном платформы
FlameWheel F330 С PX4 на Zeal колодки с защитным Hard Top
FlameWheel F330 С PX4 на Zeal колодки с защитным Hard Top
PX4F330accels_5_9_13Усердие конной FlameWheel имеет плюс и минус один вибрации все оси = 1/10 G
Это видео демонстрирует виброизоляцию, используя Moon гель на Go-Pro камеры (Here!) .
Уплотнительное кольцо Подвеска Гора:
Создание платформы, на которой можно смонтировать управления полетом доска с отверстиями и винтами на четырех углах. Установите контроллер полета на этой доске с помощью двухсторонней самоклеющейся ленты.
Mount 4 стоек на верхней части рамы расположены 1/10 «до 1/8» дальше друг от друга, чем ширина платформы, на которой был смонтирован пульт управления.
Вставьте 1/16 «нейлоновые уплотнительные кольца через каждом углу управления полетом борту и стойках так, что авиадиспетчер не имеет жестких крепления к раме. Ссылка (Here!)
- Общий диаметр уплотнительное кольцо должно быть выбрано, чтобы твердо удерживать доску, обеспечивая при легкой до умеренной начальной но быстро оскорбил движение доски (как правило, 1/2 «до 3/4» OD) и силиконовые уплотнительные кольца должны, как правило влажные лучше чем Буна-N уплотнительных колец (размеры 15 — 21), если вы можете приобрести их.
FlameWheel F450 уплотнительное кольцо Подвеска Платформа Гора
FlameWheel F450 уплотнительное кольцо подвеса Платформа Гора сырье Accel Значения
FlameWheel уплотнительное кольцо Подвеска Гора
График уровней вибрации показывает, что они находятся под 0,1 г на все оси
Предупреждение! Если вы устанавливаете свой управления полетом плату к распределительной плате, было бы лучше, чтобы Наденьте опоры для управления полетом борту отдельном листе стекловолокна нарезанные по размеру, что впоследствии может быть болтовых через существующие отверстия в распределительной плате. Сверлить только через распределения питания для монтажа Стойки, если вы полностью уверены, вы не вызовет короткое и использовать крепежные винты с резьбой нейлона или противостояние шпильки.
Вибрации короткий сочетании, так что все, что оставляя избыток угловой зазор делает это требует более высокой начальной уплотнительное кольцо напряжение, которое уменьшает вибрацию затухания отклика и позволяет доска физически наклон больше (что является нежелательным, поскольку это бросает датчик планера отношений выключения).
Недостатком уплотнительного кольца подвески по сравнению с Гель колодки является то, что механически более сложным и требует настройку оба диаметра уплотнительного кольца и поперечным сечением.
Вы можете комбинировать уплотнительное кольцо и дизайн гель площадку с помощью промежуточной пластины и выгоду от двойного обменного демпфирования.
Беруш Гора
- Покупка медленный кремний ответа или пенополиуретановой или пены затычки для ушей ПВХ, таких как эти от 3M
- Создать платформу, на которой смонтировать управления полетом доска с отверстиями в четырех углах. Отверстия должны быть достаточно большими, чтобы позволить беруши для вставки в них, но не настолько свободно, что плата высвободился в трудные посадок. Убедитесь, что отверстия гладкие, чтобы они не врезались в беруши. Также имейте отверстия возле углов вашего электронного модуля пластины, чтобы минимизировать ненужное движение модуля.
- Установите контроллер полета на этой доске с помощью двухсторонней самоклеющейся ленты. Очень масса добавляется к борту может улучшить гашения вибрации.
- Сожмите затычки для ушей через имеющиеся отверстия в раме (или вырезать новые отверстия) и отверстия в борту, на котором контроллер рейс установленных. «Настройка» можно путем изменения количества затычки дл ушей слева открытой в середине.
Пример беруш вибрации снижения крепление
Лампа демпфер + беруш 0,05 G Ultra Low Vibration Гора
- Роберт Лефевр развил эту чрезвычайно высокая производительность установки, которые фактически выполнены лучше, чем ожидания.
- Он состоит из монтажной пластины с 100г мягкого типа резиновой грушей «Gimbal» заслонку на каждом углу с половиной пенополиуретана затычки дл ушей размещены внутри каждого из них.
- Карданная Тип лампы сами амортизаторы могут работать в растяжении или сжатии.
- В затычки для ушей обеспечивают дополнительный демпфирующую среду с другом диапазоне частот демпфирования чем амортизаторов луковицы сами по себе.
- В беруши также ужесточить луковица монтирует немного предотвращая чрезмерное свободное движение в результате работы обычных маневрах.
- Это было успешно гасит клон Flamewheel с гибкими руками и более размера 12 «пропеллеров в G диапазоне 0,05.
Отлично 3D Отпечатано Антивибрационная платформа
По GuyMcCaldin с оригинальным Блог статьи здесь: http://diydrones.com/profiles/blogs/3d-printed-anti-vibration-mount
За последние несколько недель, я прототипов отличается анти вибрации крепления конструкций с использованием вверх Мини 3D-принтер. Я хотел что-то, что давало хорошо, используя доступные и легко доступных компонентов.
Первый дизайн начал с анти демпферов колебаний в простой вертикальной конфигурации. Это страдал от слишком большого спектакля в горизонтальной плоскости, которая могла бы вызвать нестабильность в быстрых ускорений. На следующий дизайн поворачивается на демпферы 45 °, в результате чего гораздо более даже сопротивление между горизонтальной и вертикальной плоскостях.
Большие резиновые демпферы обеспечивают превосходную изоляцию. Слишком много на самом деле. Идеальный анти вибрации крепление изолирует контроллер от высокочастотных вибраций, но проводит низкочастотные вибрации, которые могут представлять небольшие изменения в отношении. В течение следующего дизайна, я переехал в небольших и немного жестче демпферов, доступных на Hobby King.
Я тестировал их на tricopter Turnigy Talon, используя APM 2.5. GPS крепится к верхней части АРМ увеличить подвижную массу, которая помогает в снижении слегка более высокие вибрации частот.
Результаты пока предположить, что это очень хорошо работает:
На приведенном выше графике берется из двух минутах наведении в режиме слоняться. Все оси ниже ± 1 г, что превышает спецификации, изложенные в руководящих принципах Arducopter.
Используя инструмент (Link) , что Форрест Франц разработаны, мы видим, эти результаты с другой точки зрения:
Результаты разгона до сих пор отлично, но шаг и стабильность ролл показывает немного колебаний. Я использую значения PID по умолчанию, которые, несомненно, выиграют от настройки, и полет в несколько ветреную погоду. Я также знаком с винтокрылых полета, так что я по-прежнему оттачивая свои летные навыки. Я в состоянии держать tricopter в 1м х 1м х 1м куб, но он медленно дрейфует вокруг, если есть изменения в ветер.
Речь идет о наиболее вероятные причины, но в интересах полного раскрытия, я хотел бы упомянуть, что это может быть вызвано APM не реагирует на небольшие изменения в отношения, если крепление создает слишком много изоляции. Это, конечно, кажется, не влиять летающую производительность, tricopter впечатляюще стабильно в режиме слоняться. Я не буду знать, если это вопрос или нет, пока больше людей не попробовать инструмент Форреста, так что я больше данных для сравнения мои результаты в (вы можете найти ветку форума (Here!)
Если у вас есть доступ к 3D-принтер, вы можете скачать файлы STL здесь: Omnimac APM гору v1.5.stl
С другой стороны, я загрузил дизайн к Shapeways . Вы можете приобрести его, начиная с $ 22,92 в зависимости от материала:
У меня включают маржу в размере 30% в цене (
$ 5), который будет идти в сторону поездки в Африку в ноябре, где я буду жертвовать время и ресурсы при помощи 3dr питание UAS в исследованиях дикой природы и сохранения.
Для завершения гору, вам нужно эти амортизаторы , которые стоят $ 1,20 от Hobby King.
Крепление может быть установлен с помощью двусторонний скотч или винтами M3 разнесены на 45 мм х 45 мм. Если вы хотите, чтобы я изменить файл, чтобы удовлетворить варианты монтажа вашего планера, просто дайте мне знать.
Файл журнала, который был использован для получения результатов, показанных выше, можно скачать отсюда: Turnigy Talon 2мин Мешкаются (по умолчанию ПИД)
Дополнительные соображения подавления вибраций
Эти прокладки могут обеспечить достаточную или дополнительного подавления вибраций: Жесткий диск антивибрационные втулки
Значительные успехи в виброизоляции также могут быть реализованы с помощью высокого гибкого провода и снятия напряжения подход ко всем проводов, подключенных к управлению полетом борту (и используя минимальное количество проводов, необходимых, а также.)
Некоторые кадры имеют более низкие, чем обычные вибрационных характеристик из-за кадра жесткость / Flex и изолированный централизованная масса может сильно влиять двигателя / проп передачу вибрации на центральный контроллер боя.
Выделение и демпфирование улучшается несколько посредством вставки управления полетом доска / корпус между затухания площадки с обеих сторон примерно двадцать сжатия процентов. 30 дюрометр Sorbothane фактически указанный при 15 до 20 процентов сжатия для оптимального демпфирования.
Хотя 30 дюрометр Sorbothane кажется отличным кандидатом, личный опыт показывает, что это становится постоянно сжимаются и не так эффективна, на снижение вибрации в качестве геля решений.
Ссылка на блог о первом APM антивибрационной монтажной системы для достижения 0,05 г демпфирования (2/20/2013 улучшилось до 0,02 G), систему изоляции двойная зона, сочетая Öring подвеску и силиконовую прокладку является (Here!)
Балансировка двигателя может также уменьшить вибрацию и особенно на более дешевые или более мощных двигателей. Балансировка включает:
- Плотно закрепите небольшой стяжку вокруг двигателя (без PROP), обрезать вкладку расширенную и спин его.
- Попробуйте несколько раз, каждый раз поворачивая стяжку на корпусе двигателя немного, пока вибрация не уменьшает или уходит.
- Небольшой кусочек липкой ленты может быть повторно установлен вместо пояском при желании или для небольших двигателей.
- Найдя место, где есть хотя бы вибрации (и вы должны быть в состоянии услышать его), отметить место непосредственно под застежкой на хомутами с фломастером.
- Добавьте небольшое пятнышко горячее оружие клея клея, где застежка хомутами был и повышения клей немного в то время, пока вибрация сведена к минимуму.
- Если вы положите слишком много клея на нем могут быть удалены с X-акто ножом.
Читайте также: Стеклоподъемник передний левый пежо боксер 3 с мотором
Виброгасящих двигателя монтирует как это или это может или не может уменьшить вибрацию.
Крепления камеры также должны быть эффективно изолирован и затухают от вибрации, но у них уже есть ряд «мягких» монтажных решений.
Камера сервоприводы нужно изолировать вибрацию, а также, либо в изолированной монтажа камеры себя или с их собственного решения подавления вибраций.
Вы должны использовать высококачественные шаровые шарниры на ваших камера серво оружия и адекватных подшипников или втулок в самой горе с нулевым свободной игры для предотвращения инерционного помои.
Сервоприводы качества без свободной игре также обязательным для точности операторскую работу.
В данный момент, кажется, что более жесткая рама, тем лучше, потому что рамка гибкого вводит нежелательного механического задержку (гистерезиса) в переводе двигателя индуцированной действия к центрально расположенной управления полетом борту. (Не шокируют Установите двигатель Arms).
Количество и тип затухания среды должна быть тщательно согласована с весом (массы) пункта мы пытаемся изолировать, а также частоты и амплитуды колебаний мы стремимся на влажные. Мы пытаемся, чтобы изолировать управления полетом доска, которая весит меньше, чем 2 унции и это очень малая масса.
Практически все от решений шельфа (либо панели или типа шпильки) предназначены для изолированной массы, что будет весить по крайней мере 5 до 10 раз, что APM или PX4 / IO доска весит для оптимальной эффективности. Это включает в себя все предварительно сделанные Sorbothane, Альфа гель, уха, пены памяти или другие силиконовые или уретановый гель или пена крепления, а также Господь Micro крепления.
Болт с резьбой, или рукав типа крепления гель крепление Правильно спроектированная для массы нашего совета управления полетом или блоке электроники переживает стресс-х годах полет нормальный был бы намного лучше, долгосрочное решение.
Резюме конкретных характеристик вибрации, которые мы должны влажные:
- Частота вибрации и амплитуды мы в первую очередь необходимо снизить является характеристикой двигателя / пропан единиц повороты на скорости полета.
- То есть, это довольно высокой частоты с довольно низкой амплитуды.
- Это требует, чтобы мы предоставляем короткие сочетании демпфирование и диапазон изоляции.
- Сама плата не должны иметь ни извлечь выгоду из диапазона движения, которая превышает амплитуду вибрации.
- Поскольку плата не применяет силу, чтобы планера, единственное, что мы должны иметь дело с демпфированием / изоляции является вес (масса) самой платы плюс силы, приложенные к нему обычным полета маневрирования планера в.
- С превосходным широком диапазоне частот, высокие демпфирующие материалы доступны нашим самым большим беспокойством будет использовать надлежащее количество них оптимально влажной наш управления полетом доска. (Слишком много так же плохо, как и слишком мало.)
- Сочетание управления полетом доска и приемник на отдельный вибрации при блоком электроники «тарелке» или корпус может увеличить массу модуль делает его легче эффективно влажные, а также уменьшения соединительные провода и делает всю систему более модульной.
Примечание по терминологии:
Изоляция прост незатухающая (поддержка весной или резинкой), которая позволяет движение изолированного объекта во многом отдельно от объекта, содержащего (Автомобильный весенней например). демпфирования является превращение вибрации в тепловую энергию ударной поглощающей среде (автомобильный амортизатор например.) Наша конечная цель здесь заключается в обеспечении наиболее высокой и средней снижение частоты то же время позволяя движение низкочастотный фактической платы пройдет совместно с планера с минимальной задержкой настолько реалистично наши методы включают как демпфирования и изоляции.
Ссылки на соответствующих обсуждений:
Инструкция по установке ПО Mission Planner
ПО Mission Planner является бесплатным, с открытым исходным кодом доступный для Windows. Эти инструкции проведут вас через установку Mission Planner для компьютера.
Загрузите последнюю версию ПО Mission Planner для установки
Выберите самую последнюю MSI и выберите Загрузить.
Запустите установку
Откройте файл установщика Microsoft (. MSI) и выберите Выполнить для запуска утилиты установки.
Планировщик Миссия Installation Utility
Следуйте инструкциям установки, утилита автоматически обновит и установит необходимые драйвера. Если вы получаете сообщение об ошибке установки DirectX, пожалуйста, обновите ваш DirectX плагин в центре загрузки.
Если вы получаете предупреждение как на картинке ниже, выберите «Установить программное обеспечение этого драйвера», чтобы продолжить.
Выберите установки драйвера в любом случае.
Mission Planner обычно устанавливается в C: \ Program Files (x86) \ APM папка Планировщик или C: \ папка Планировщик Program Files \ APM. Там же находятся файлы журнала устаноки. На рабочем столе должен появится значек программы во время установки.
Запустите Mission Planner
После завершения установки, запустите Mission Planner, нажав на иконку. Mission Planner автоматически уведомляет вас о доступных обновлениях. Пожалуйста, всегда запускать последнюю версию ПО.
Обновление ПО и проблемы при запуске
Иногда после автоматической загрузки обновления ПО программа может попросту не запуститься, это связано с некоректным обновлением (иногда не по вашей вине) для этого рекомендуем обновлять через скачивание и установку ПО Mission Planner
Загрузка прошивки для АРМ
Прошивка для APM является мозгом в работе автопилота, которая создается и поддерживается с открытым исходным кодом. Скачивание свежей прошивки является одной из важной частью первичных установок, а так же полезна при обновлении уже существующей прошивки. Эта инструкция покажет вам как установить последнюю версию прошивки на APM.
Подключите APM к компьютеру
После запуска ПО Mission Planner на компьютере подключите APM к компьютеру с помощью провода USB. Используйте непосредственно порт компьютера, а не USB-хаб.
Windows автоматически определит APM и установит коренктные драйвера, если вы получите сообщение «драйвер не найден», то обратитесь к инструкции по решению этой проблемы — Установка USB драйвера APM
Подключение APM к Mission Planner
Далее мы должны указать порт который используется для подключения к APM. Используя в Mission Planner выпадающий список в верхнем правом углу экрана (рядом с кнопкой Connect) укажите порт для соединения с APM. Выберите Arduino Mega 2560 и выберите скорость 115200. Не нажимайте кнопку Connect
Выбераем прошивку
Зайдите в раздел Initial Setup -> Firmware . В зависимости от используемой конфигурации вашего аппарата щелкните на картинку требуемой конфигурации. Если вы используете гексакоптер — нажмите на 6 лучевой мультикоптер, Тип рамы Х или Plus мы укажем позже. Помните : Экран прошивки не появится если вы уже произвели соединение нажав кнопку Connect. Прервите соединения для доступа к разделу установки прошивок.
Выберите кадр на скачивание прошивки.
После того как вы выбрали нужную вам конфигурацию (рамы) ПО Mission Planner автоматически найдет новую версию для вашего аппарата и предложит загрузить её на APM. Выберите «Yes» что бы загрузить прошивку, когда процес загрузки и проверки прошивки закончится появиться сообщение о завершении.
Проверка
Нажмите кнопку Connect (в правом верхнем углу программы) что бы загрузить параметры MavLink из APM. ПО Mission Planner покажет окно процесса загрузки параметров.
После скачивания параметров MavLink в ПО Mission Planer можно увидеть данные получаемые в реальном времени, убедитесь, что они передаются и перемещение полетного контроллера отображается в программе.
Миссия Планировщик APM значки подключений.
Важно: после загрузки новой прошивки необходимо изучить изменения а так же провести калибровку датчиков — это обезопасит Вас от неудач
Установка драйвера USB для полетного контроллера APM квадрокоптер
Шаг первый: Установка драйвера APM-USB
При подключении контроллера APM к вашему ПК в первый раз, если вы не использовали Arduino раньше, вам потребуется загрузить нужный драйвер. Вы узнаете об этом после подключения полетного контроллер, когда появиться уведомлением в системном трее операционной системы Windows
Нет проблем! Просто скачайте драйвер USB здесь и сохраните в папку на вашем компьютере. (Убедитесь, что ОС Windows не переименовал его в файлс с текстовым расширением, иногда Windows 7 делает это; Если он с таким расширением — просто переименуйте его обратно, так как надо). Распакуйте архив, это вам потребуется в следующем шаге
Теперь перейдите в панель управления Windows и запустите «Диспетчер устройств» (в «Оборудование и звук» / «Устройства и принтеры»). Вы увидите в разделе «Другие устройства» «Arduino Mega 2560». Щелкните правой кнопкой мыши по нему и выберите «Обновление драйвера»
Затем выберите «Выполнить поиск драйверов на этом компьютере», и перейдите к папке, в которой сохранен загруженный драйвер. Вы также можете попробовать выбрать драйверы, сохраненные Mission Planner, перейдя в C: \ Program Files \ Mission Planner \ Drivers.
После того как вы указали Windows папку для загрузки драйвера, у вас появится предупреждение, выберите «Все равно установить этот драйвер».
Как только драйвер правильно установился вы увидите свой APM в разделе Порты, как показано ниже (номер com-порта назначается автоматически Windows и зависит от того, как много иных других портов уже есть в системе. ваш номер, вероятно, будет отличаться от этого, как показан здесь):
(Обратите внимание, что если вы также используете радиомодули телеметрии на этом компьютере Windows назначит им другой порт, который вы также можете увидеть на панели управления.)
Обязательная настройка оборудования для APM
В рамках первоначальной установки вам нужно настроить необходимые аппаратные компоненты с помощью ПО Mission Planner. Эти инструкции описывают процесс выбора ориентации рамы и настройке радиопередатчиков, компаса и акселерометра.
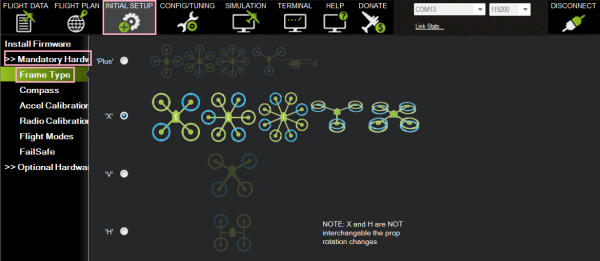
Выберите тип рамы
На экране ПО Mission Planner выберите Initial Setup -> Frame . Выберите тип рамы для мультикоптера. В конфигурации по умолчанию является рама типа X. Если вы хотите одним лучем указать «нос» в качестве фронтального направления, выберите конфигурацию Plus. Для Трикоптеров, традиционных вертолетов и тип рамы Y6, рама игнорируется.
( Для Н-рамы квадрокоптера используйте дополнительный вариант ‘3’ на вкладке Дополнительные параметры. Чтобы применить конфигурацию H-рамы, поменяйте левый задний и правый задний пропеллеры обратного направления с двигателей (путем замены любых двух проводов электродвигателя). Повторите тот же процесс для передних двух двигателей.)
Калибровка компаса
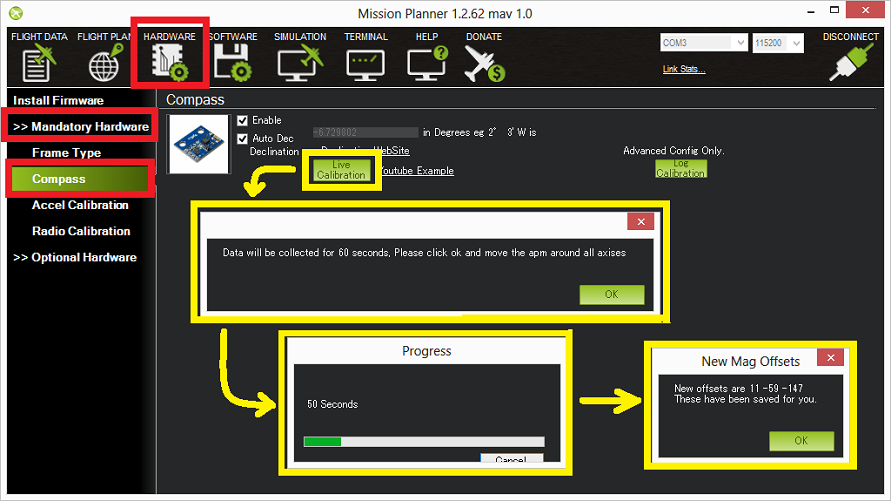
Для выполнения базовой калибровки компаса необходимо:
- В Mission Planer в меню Intial Setup выберите Compass . Выберите правильную ориентацию для вашей установки.
- Убедитесь, что компас включен и установлены галочки у Enable и AutoDec
- Нажмите кнопку «Live Calibration»
- Вплывающее окно сообщит вам, что у вас есть 60 секунд на то, чтобы вращать APM вокруг по всем осям, нажмите «ОК»
- Появиться окно, которое покажет, что выполняется сбор данных с компаса
- В течение следующих 60 секунд вам нужно удерживать квадрокоптер в воздухе, и поворачивайте его медленно, так что бы каждая сторона (спереди, сзади, слева, справа, сверху и снизу) указывала вниз к земле в течение нескольких секунд.
- По завершении появится еще одно окно , которое покажет новые расчитанные смещения измерений компаса.
- Для АРМ все три значения от -150 до 150 смещения являются хорошими. Нажмите «OK».
Проверьте это видео для примера выполнения калибровки компаса.
Подробнее об этом и других процедурах настройки компаса «compassmot» можно найти .
Общее обсуждение магнитных помех и способы их снижений можно найти .
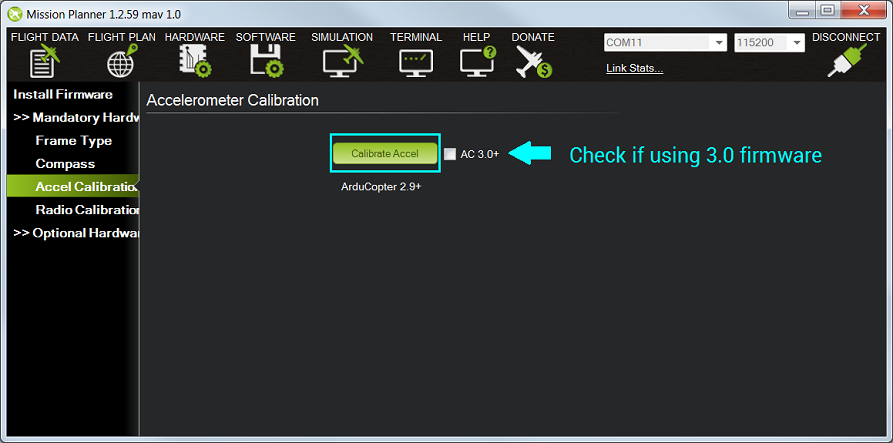
Калибровка акселерометра
В Mission Planner выберите раздел Init Setup, выберите Accel Calibration в меню слева.
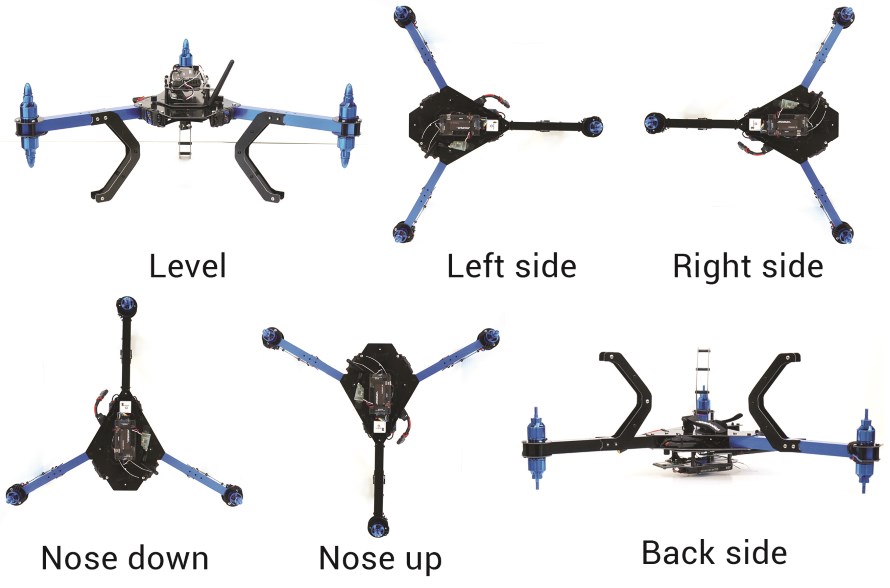
Если вы используете прошивку ArduCopter 3.0, убедитесь, что установленна галочка 3.0 +. Если вы используете 2.9.1b (или старее прошивки), снимите галочку. Этот процесс потребует от вас разместить беспилотник в последовательных положениях, которые попросит вас программа. Эти положения уровня являются важными, так как ваш полетный контроллер определяет уровень во время полета.
Важно не перемещайте беспилотник сразу после нажатия клавиши каждого шага. Проверьте это видео для примера, как держать квадрокоптер.
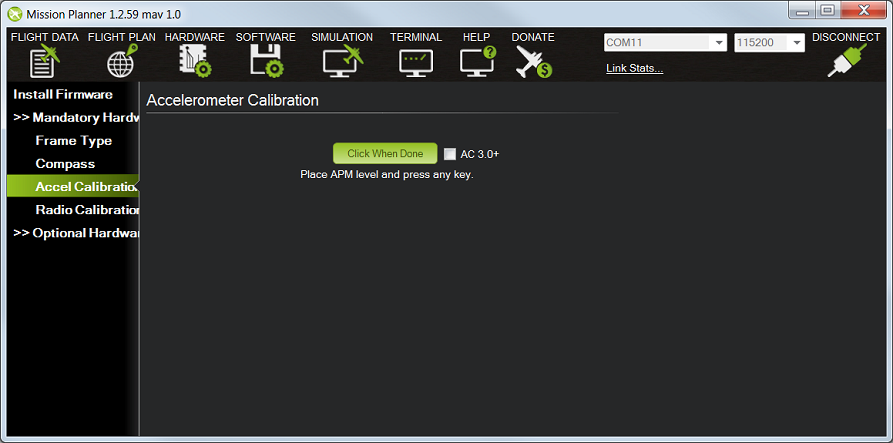
Когда вы будете готовы для выполнения калибровки, выберите Accel Calibration .
Mission Planner будет подсказывать как надо разместить беспилотник в каждой позиции калибровки, нажмите любую клавишу. Пройдите требуемые шаги.
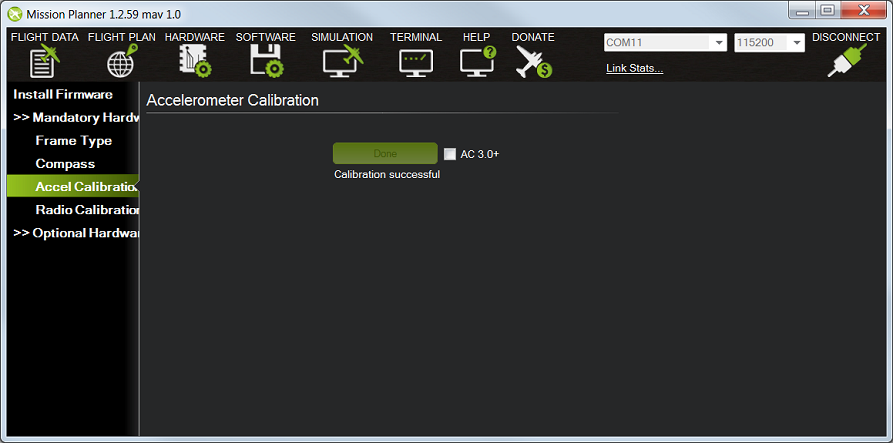
Когда вы завершили процесс калибровки, Mission Planner будет отображать окно успешной калибровки, как показано ниже.
Калибровка радиоуправления
Включите радиоаппаратуру, убедитесь, что передатчик находится в режиме самолета (APM необходим режим полета, независимо от типа платформы на экспериментальной основе), установите все стики по центру.
Рекомендуемая настройка RC каналов на передатчике.
Для аппаратуры Mode 1 , левый джостик (стик) будет контролировать высоту (Pitch) и рыскания (Yaw), правый — будет контролировать дроссель (газ, throtle) и крен (Roll).
Для аппаратуры Mode 2 , левый джойстик (стик) будет управлять дроссельной заслонкой (throtle) и рыскания (Yaw); правый — будет контролировать крена (Roll) и тангажа.
Для любого типа передатчика, трехпозиционный переключатель должен быть подключен к 5-му каналу и будет контролировать режимы полета.
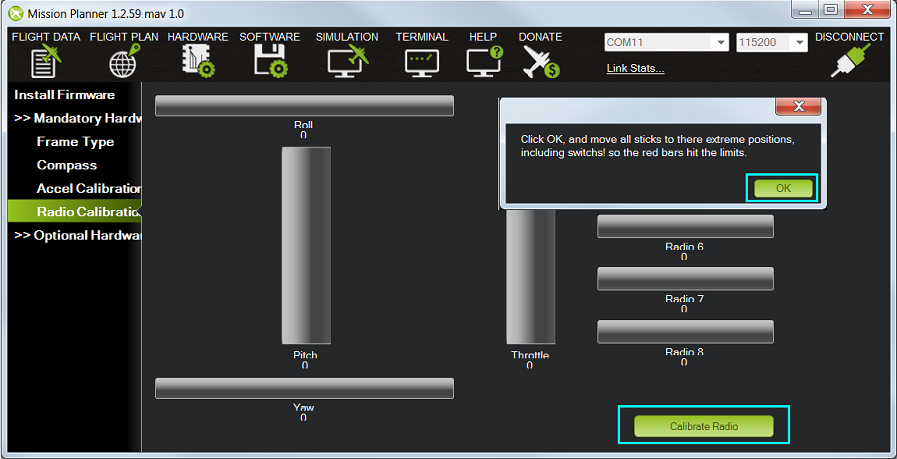
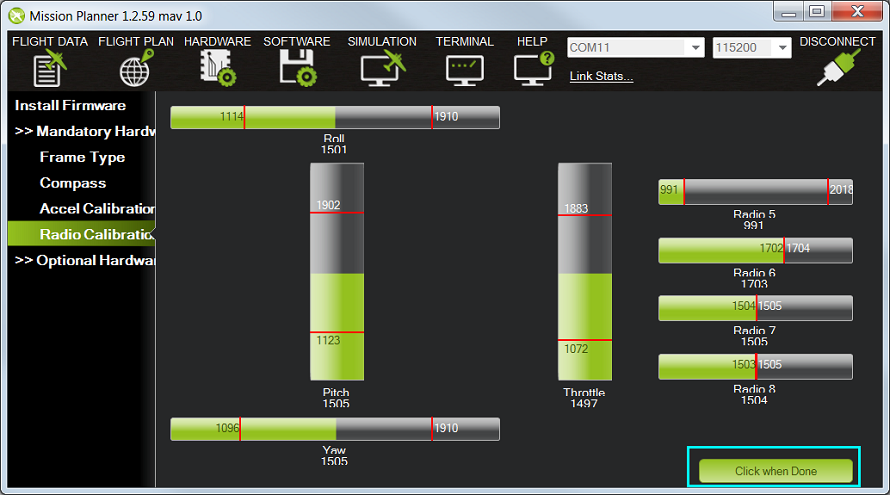
По желанию ручки настройки передатчика должны контролировать канал 6 для настройки полетета. 7 и 8 канал могут быть использованны для вспомогательных функций. В Planner Mission, нажмите кнопку «Калибровка Радио» в нижней правой части окна. Mission Planner вызовет диалоговое окно с предупреждением что пропеллеры должны быть сняты!. Выберите OK.
Нажмите OK и начните двигать ручки управления и тумблерами на аппаратуре до их предела и наблюдайте за результатом калибровочных границ радио. Появившиеся красные линии калибровочных баров укажут максимальное и минимальное значения.
Ваше передатчик должен привести следующие изменения управления:
радиоканал 1: низкий = ролл слева, высокий = ролл прямо
радиоканал 2: низкий = шаг вперед, высокая = шаг назад.
радиоканал 3: низкий = дроссельная заслонка вниз (в выключенном состоянии), высокий = дроссельной заслонки до максимума.
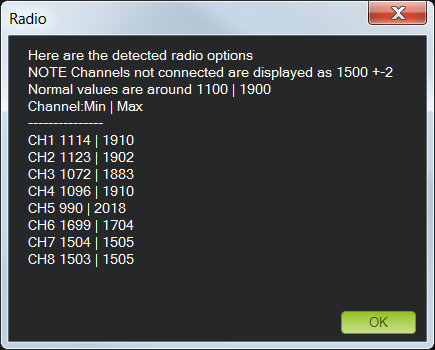
радиоканал 4: низкий = рыскания влево, высокий = рыскания вправо.Когда красные линии для крена, тангажа, дросселя, рыскания и радиоканала 5 (необязательно у радиоканалов 6, 7 и 8) устанавлены на минимальных и максимальных значениях, выберите нажмите «Done». Mission Planner покажет сводку данных калибровки. Нормальные значения около 1100 для минимумов и 1900 для максимумов. Если значения показания бара идут в противоположном направлении от направления движения стика или тумблера это означает, что канал находится в инверсии на стороне передатчика. Используя меню аппаратуры настройте требуемый канал (установите или снимите инверсию) что бы установить правильное функционирование.
Настройка дополнительного оборудования (опция)
Дополнительные аппаратные конфигурации для монитора батареи, гидролокатора (Sonar sensor), датчик воздушной скорости (AirSpeed sensor), оптического потока (Optical Flow), OSD, камеры и следящей антенны подробно описано на вики странице: дополнительное борудование
Калибровка регуляторов скорости моторов ESC
Электронные регуляторы скорости отвечают за скорость вращения двигателей, регулируемые полетным контроллером. Большинство регуляторов должны быть отрегулированы так, что бы знать минимальное и максимальное значение ШИМ, что посылает полетный конроллер. Эта страница содержит инструкции по калибровке ESCs. Пожалуйста, выполните калибровку радио перед выполнением калибровки регуляторов скорости моторов ESC.
О калибровке
Калибровка ESC будет зависить от того, какую марку вы используете. Поэтому обратитесь к документации регуляторов, для получения конкретной информации (например, тонов). Калибровка «всех сразу» хорошо работает для большинства регуляторово скорости моторов, так что это хорошая идея, чтобы попытаться сделать это сразу и если это не удается, попробуйте метод «поочередной калибровки ESC».
- Для большинства регуляторов скорости моторов ESC можно использовать метод калибровки «всех сразу».
- для регуляторов DJI Opto не требуется и не поддерживается калибровка, поэому пропустите эту страницу полностью
- Некоторые модели регуляоров ESC не позволяют производить калибровку, и не ставятся охрану (disarm), если вы не отрегулируете стики вашего радио так, чтобы при минимальном положение значнние составляло около 1000 PWM. Обратите внимание, что если вы измените лимиты , тримы и все то, что отвечает за положение стика на аппаратуре вам необходимо повторно сделать калибровку радио.
- Что бы приступить к этой процедуре вы должны в обязательном порядке завершить «калибровку радио» и «подключение регуляторов скорости к моторам». Далее выполните следующие действия:
Калибровка «всех сразу» регуляторов ESC
Проверьте безопасность работ!
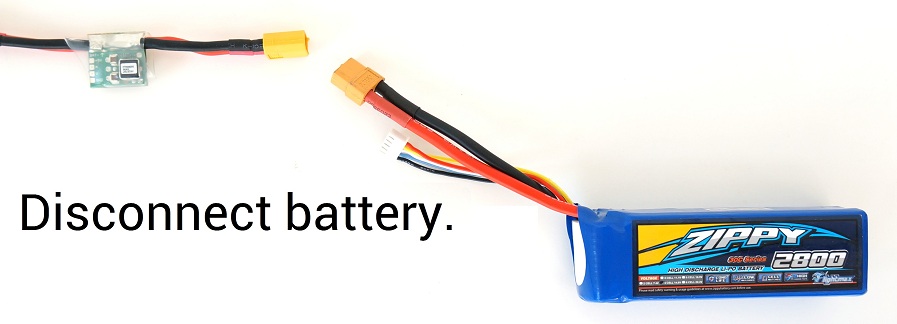
Перед калибровкой регуляторов ESC, пожалуйста, убедитесь, что ваш квадрокоптер не имеет пропеллеров, и что APM не подключен к компьютеру через USB и батарея Lipo отключена.
Включите аппаратуру и установите стик газа на макмимум.
Подключите аккумулятор Lipo. На полетном конроллере АРМ начнут циклически загоратся красный, синий и желтый светодиоды. Это означает, что APM готов перейти в режим калибровки ESC в следующий раз, когда вы его включите снова.
Оставьте стик газа на максимуме и переподключите батарею (выключите и снова включите).
Для PX4 или Pixhawk, нажмите и удерживайте кнопку безопасности, пока не появится гореть красным.
Автопилот войдет в режим калибровки ESC. (На нём вы заметите , как синий и красный светодиоды начнут мигать последовательно, как на полицейских автомобилях).
Подождите пока не появятся музыкальный сигнал , который будут излучать ваши регуляторы регулярное количество раз «бипов», показывающее количество ячеек вашей батареи (т.е. 3 для 3S, 4 для 4S), а затем еще два звуковых сигнала, чтобы указать, что максимальная дроссельной был захвачен.
Уберите стик газа до минимального положения.
Регуляоры должны издать длинный гудок, который указывает, что минимальное положение стика газа было установленно и калибровка закончится.
Если вы слышали длинный сигнал, который указывает успешную калибровку, это значит, что регуляторы сейчас «живы» и если немного подать газу моторы начнут вращаться. Проверьте, что моторы вращаются, поднимайте газ немного и убирайте его.
Установите стик газа на минимум и отключите LiPo батарею, для выхода из режима калибровки ESC.
Видео, демонстрирующее процесс калибровки ESC:
Руководство по калибровки «поочередная калибвровка ESC»
Проверьте безопасность работ!
Перед калибровкой регуляторов ESC, пожалуйста, убедитесь, что ваш квадрокоптер не имеет пропеллеров, и что APM не подключен к компьютеру через USB.
Индивидуальная калибровка регуляторов ESC
- Подключите один из ваших регуляторов ESC трехпроводным кабелей в канал газа радиоприемника приемника. (Это, как правило 3-й канал.)
- Включите аппаратуру и установите ручку газа в максимум (полностью вверх).
- Подключите аккумуляторную батарею LiPo
- Вы услышите музыкальный тон, затем два звуковых сигнала.
- После двух звуковых сигналов, опустите ручку газа полностью вниз.
- Вы услышите несколько гудков (количество гудков соответствует количеству ячейк батарейки, которую вы используете) и один длинный сигнал, указывающий конечные точки были установлены и ESC откалибровался.
- Отключите аккумулятор и повторите эти действия для всех регуляторах ESC.
- Если окажется, что регуляторы скоростей не калибруются то возможно , канал газа находиться в инверсии (смотрите настройки аппаратуры) и его необходимо настроить (влючить или выключить инверсию).
- Если все же возникают проблемы после попытки калибровки (например, регулятор по прежнему издает непрерывно звуковой сигнал) попробуйте уменьшить ваш триммер газа на 50%.
Читайте также: Хонда одиссей объем масла в моторе
Тестирование
После того как вы произвели калибровку ваших регуляторов скоростей ESC, можете проверить их, подключив батарею LiPo. Помните: подключайте без винтов!
- Убедитесь, режим полета установлен в Stabilize (Стабилизация полета).
- Снимите с охраны квадрокоптер (Arming) (инструкции (Here!), если вы никогда не делали этого раньше)
- Дайте немного газа. Все ваши двигатели должны вращаться примерно с одинаковой скоростью, и они должны стартовать свое вращение одновременно. Если двигатели не стартуют одновременно и у них разная скорость вращения это означает, что ваши регуляторы скоростей ESC не правильно откалиброваны.
- Поставьте на охрану свой аппарат (Disarm)
Примечания / Поиск и устранение неисправностей
Режим калибровки ESC «сразу все» просто передает положение стика газа непосредственно через APM к регуляторам ESC. Если вы включите полетный контроллер Ardupilot в этом режиме , то он будет подавать тот же PWM сигнал на все регуляторы скорости ESC. Вот и все, что он делает. Многие регуляторы скоростей ESC используют полный газ для входа в режим программирования, позиция полного газа сохраняется в качестве верхней конечной точки и когда вы тянете ручку газа до минимума — это положение сохраняется как нижняя конечная точка.
Если после калибровки ваши двигатели не вращаются же скоростью и одновременно не начинают запускаться то повторите процесс калибровки. Если вы пробывали калибровку «все сразу» и это не сработало или регуляторы не крутят двигатели одинаково, попробуйте ручной метод калибровки, описанной выше. Это должно работает каждый раз. (Редко после полной ручной калибровки вам нужно делать дополнительную калибровку «сразу все»).
Есть огромное количество марок и типов регуляторов не поддерживающих нормальных конвенций программирования (иногда даже при том, что они утверждают о поддержке), и они могут просто не работать с АРМ. Это, к сожалению правда, но с оговорками.
Рекомендуемые настройки ESC:
Battery type: Ni-хх (NiMH или NiCd)
CutOff режим: Soft-Cut (по умолчанию)
Start режим: Normal (по умолчанию)
Настройка моторов
Мультикоптеры требуют вращение двигателей в определенных направлениях в зависимости от их конфигурации.
Производя первоначальные установки вы должны убедиться в правильном вращении каждого двигателя.
Эта страница дает инструкции по настройке направления двигателей, выбору пропеллеры и их соединению.
Проверка направление вращения двигателя
- Убедитесь, что нет установленных пропеллеров на вашем квадрокоптере!
- Включите аппаратуру и установите режим полета Stabilize (Стабилизация).
- Подключите LiPo батарею.
- Снимите с охраны квадрокоптер (Arming) удерживая стик газа вниз и положение руддера вправо. (нижняя правое положение) в течение пяти секунд.
- Если квадрокоптер не снимится с охраны после этих действий, возможно его полетный контроллер нашел предполетную ошибку (Pre-Arm Safety Check).
- Безопасная предполетная проверка синаглизирует ошибку циклическим двойным миганием красного светодиода.
- Если вы не можете пройти предполетную проверку безопасности , о посетите страницу Prearm Safety Check и исправите проблему или отключить эту проверку, прежде чем продолжать.
- Когда вы сняли с охраны квадрокоптер (arming) дайте небольшое количество газа и наблюдайте за направлением вращения каждого двигателя.
Установите правильные направления вращения
Теперь, когда ваши двигатели вращаются, мы установим правильное направление для каждого двигателя.
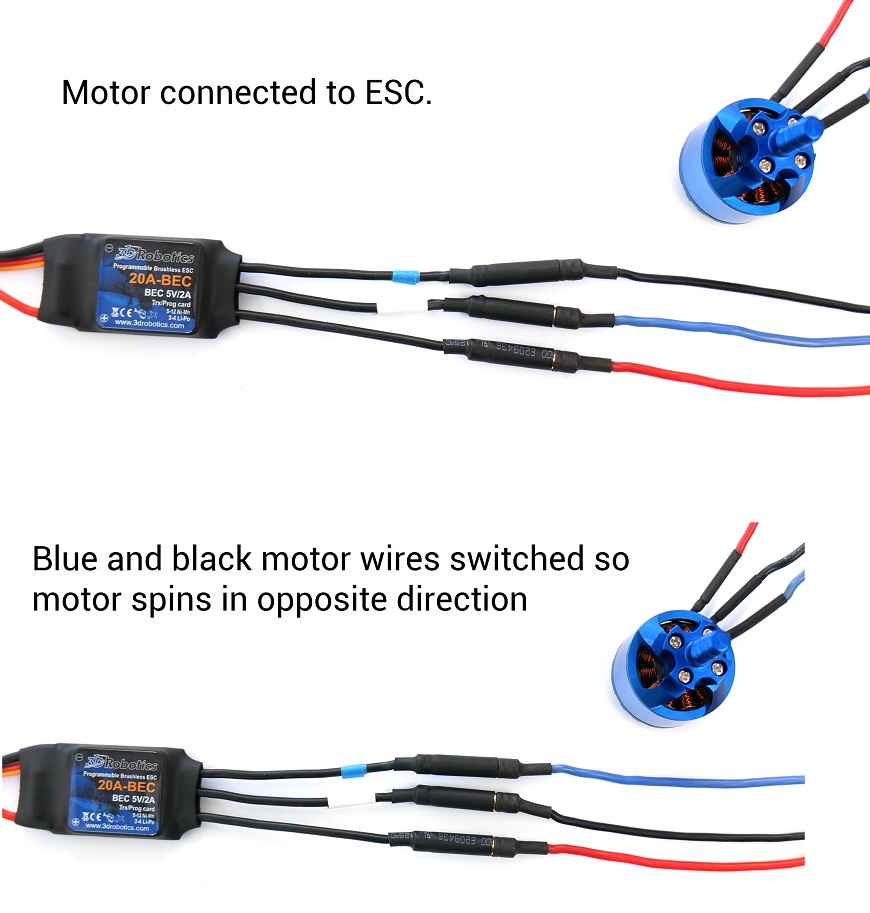
Направление вращения двигателей (по часовой стрелке или против часовой стрелки) определяеюся подключением к регуляору ESC.
Когда вы подадите небольшое количество газа , проверьте и посмотрите направление движения каждого двигателя
Моторы должны вращаться , как указано на диаграммах ниже в зависимости от типа рамы квадрокоптера.
Проверьте схему вращения двигателей указанную ниже , что бы проверить и убедится, что двигатели производят вращения в правильном направлении.
Скорее всего некоторые из ваших моторов нужно будет переключить.
Для изменений направления вращений мотора отсоедените LiPo батарею.
Что бы поменять сторону вращения мотора вам необходимо переключить два из трех кабелей регулятора ESC соединяющие мотор, подключите как показано ниже.
Выбор винтов
- Практика показывает, что в документации каждого мотора есть своя таблица пропеллеров, которые рекомендует производиель, можно следовать этим рекомендациям при выборе пропеллеров.
- Найдите вашу раму квадрокоптера в указанных изображениях. Используйте толкательные пропеллеры в зависимости от нужного вам направления.
- Толкательные пропеллеры, как правило, с пометкой «P» или «SFP» на нем.
- Выберите необходимые пропеллеры на основе направления каждого двигателя.
- Винты бывают разных вариантов и подходят для различных нужд.
Прикрепите винты
- Отвинтите гайки у моторов и соедените пропеллер на моторную цангу с надписями лицом вверх.
- Если у вас соосная конфигурация двигателей, убедитесь, что надпись на пропеллере лицом вверх, даже если двигатель смотрит вниз.
- Установите шайбу сверху пропеллера если это необходимо (зависит от конфигурации крепежа и пропеллеров).
- Затяните гайки для фиксации пропеллеров.
- Зафиксируйте мотор или используйте второй гаечный ключ для более лучшей фиксации пропеллеров.
Более подробную информацию по настройки двигателей (и RC входов) можно найти (Here!) .
Информация о LiPo батарях
Литиевые батареи являются предпочтительными источники питания для большинства электрических моделистов сегодня. Они предлагают высокий уровень разрядки и хранения к соотношению высокой энергии. Однако, используя их должным образом и правильно заряжая это не будет тривиальной задачей. Есть много вещей, которые надо рассмотреть, прежде чем использовать литиевые элементы для работы. Но ничего из этого не является важным, чем безопасность их использования.
ВАЖНО! Зарядка и безопасность
Литиевые элементы должны заряжаться совершенно иначе, чем никель-кадмиевых или никель-металлогидридные. Они требуют специального зарядного устройства, специально предназначенные для зарядки литиевых элементов. В целом любое зарядное устройство, которое может заряжать литий-ионные можно заряжать литий-полимерный, предполагая, что число ячеек является правильным. Вы никогда не должны взимать литиевые элементы с никель-кадмиевых или никель-металлогидридные только зарядное устройство. Это очень опасно. Зарядка lipo ячеек является самой опасной частью использования литиевых батарей. Необходимо позаботиться при их зарядке. Важно установить устройство на нужное напряжение или количества ячеек. Если этого не сделать может привести к взрыву и возгоранию. Было много таких пожаров из-за литиевых батарей. Пожалуйста, будьте внимательны и ответственны при зарядке литиевых батарей.
Вот несколько обязательных для исполнения указаний по зарядке LiPo батарей (Литий-полимерные батареи).
- Используйте зарядное устройство, которое одобрено для литиевых батарей. Зарядное устройство может быть предназначено для Li-Ion или Li-Poly. Все батареи заряжаются одинаково. Некоторые старые зарядные устройства от сотовых телефонов могут заряжать аккумуляторы до 0,1 вольт от необходимого напряжения (4.1 против 4.2), но это не приведет к повреждению батареи. Тем не менее, недорогие зарядные устройства широко доступны и использование зарядных от мобильных телефонов настоятельно не рекомендуется.
- Убедитесь в том, что правильно устанавливается количество ячеек батарейки на вашем зарядном устройстве. Смотрите на зарядное устройство очень внимательно в течение нескольких минут для того, чтобы количество правильных ячеек отображалось правлильно. Если вы не знаете, как это сделать, приобретите интелектуальное зарядное устройство или не заряжайте lipo аккамулятор.
- Используйте балансировачный разъем. Перед зарядкой новой литиевой батареи, проверьте напряжение каждой ячейки по отдельности. Делайте это после каждого десятого цикла. Это абсолютно необходимо, потому, что несбалансированная ячейка может взорваться во время зарядки, даже если выбирается правильное количество ячеек на зарядке. Если напряжение на ячейках не в пределах 0,1 вольт друг от друга, то зарядите каждую ячейку до 4,2 вольт (используя балансированную зарядку зарядного устройства через балансировачный кабель батарейки). Если после каждого разряда батарейки у вас появляется несбалансированная ячейка — аккамулятор должен быть заменён.
- Балансировачный кабель есь на большинстве lipo батареек. Они позволяют проверить напряжение на каждой ячейки. Не пытайтесь использовать вольтметр, штыри могут создать короткое замыкание случайно соскользнув. Используя балансировочный кабель и зарядное устройство поддерживающую балансировочную зарядку можно заряжать все ячейки одновременно.
- НИКОГДА не заряжайте аккумулятор без присмотра. Это причина номер один для дома и авто , которые сжигаются дотла от литиевых пожаров.
- Используйте безопасную поверхность для зарядки батареи так, что если она взорвется то пламя не повредит ничего. Можно использовать специальные пожароустойчивые пакеты , в которые помещается батарейка для зарядки, а так можно использовать любой другой хороший вариант.
- НЕ заряжайте током заряда более чем в 1С, если это специально не указано на упаковке производителя. Лично у меня был пожар в доме из-за нарушения этого правила. Сегодня есть высокозарядные батареи , котоые можно заряжать больше, чем 1С, однако это сокращает срок службы. Лучше покупать 3 батарейки, чем пытаться использовать одну, которая заряжается в три раза быстрее. Но ситуация может измениться в будущем , сейчас появляются новые батареи с улучшением характеристик. Обращайте внимание на характиристики при покупке, если они явно не указаны — используется явно старая технология производства батарей (китайские магазины у которых много дешевых батарей это как раз не указывают)
- Ни в коем случае не прокалывайте ячейку у батарейки, никогда. Если это произошло будьте готовы к воспламенению, соблюдайте повышеные меры пожаробезопасности. Если ячейка начнет вздуваться то возможно воспламенение и возгорание. Если этого не произошло то вам необходимо разрядить эту батарею для будующей утилизации подключив к ней например лампочку определенного напряжения.
- При аварии вашего летательного аппарата батарея может быть повреждена внутри. С виду это может выглядеть безопасно, но при каждой авариитщательно извлеките аккумулятор из аппарата и осмотрите его внимательно, по крайней мере в ближайшие 20 мин. Несколько пожаров были вызваны от поврежденных ячеек аккамулятора будучи оставленными в автомобиле
- Заряжайте батарею в открытом и проветриваемом помещении. Если батарея делает повредиться или произойдёт взрыв — опасные газы и ядовитые материалы будут выходить из неё.
- Держите ведро песка поблизости, когда вы летаете или заряжаете аккумулятор. Это экономически эффективный способ тушения пожаров. Это очень дешево и абсолютно необходимо.
Литиевые батареи любят тепло, но не слишком много. В зимнее время, старайтесь держать ваши батареи от холода как можно дольше. Оставьте их в машине, пока вы летаете или держите их в своих штанах . и т.д. В то же время не позволяйте им нагреваться слишком сильно. Старайтесь, чтобы ваши батареи не достигали 160F после использования. Это продлит жизнь ячеек у батарейки. Хороший способ для измерения температуры представляет собой портативный инфракрасный измеритель температуры, он может быть куплен в районе 50 долларов в большинстве хобби магазинах.
Разъяснения по LiPo
Литий-полимерные батареи используются во многих электронных устройствах. В сотовый телефонах, ноутбуках, КПК, слуховых аппаратов и многих других. Большинство, если не все, литий-полимерные батареи не предназначены для использования в хобби, Мы используем их в различных летательных аппаратах, чем они были изначально предназначены. Они похожи на литиево-ионных батареи тем, что каждая из них имеет номинальное напряжение 3,6 вольта, но отличается тем, что они не имеют корпус из твердого материала, а гибкий материал охватывает химические вещества внутри. В «нормальных» литий-полимерные аккумуляторы представляют собой тонкие прямоугольные формы с двумя выступами на верхности: одного положительного, другого отрицательного. Причина по которой мы используем этот тип батарей в том, что они значительно легче чем никель-кадмиевых или никель-металлогидридные батареи, что позволяют нашим аппаратам летать больше и лучше.
Напряжение и количество ячеек
LiPols батареи действуют по другому, чем никель-кадмиевые или никель-металлогидридные батареи, когда заряжены и разряжены. Литиевые батареи полностью заряжены, когда каждая ячейка имеет напряжение 4,2 вольт. Они полностью разряжены, когда каждая ячейка имеет напряжение 3.0 вольт. Важно, чтобы заряд ячейки не превышал напряжение 4,2 вольт и низкого напряжения 3,0 вольт. Превышение этих пределов может повредить аккумулятор.
Хороший способ гарантировать, что напряжение на ячейке не ниже 3.0 вольт во время полета — это установить отсчечку низкого напряжения (LVC) на регуляторе ESC. Важно использовать программируемый регулятор ESC, так как правильное установление отсечки имеет решающее значение для жизни ваших батареек. Используйте режим программирования ESC, что бы установить LVC на 3.0 вольт на элемент с жесткой отсчечкой (Hard Cutoff) или 3.3 вольт для мягкой отсечки (Soft Cutoff). Если ваш регулятор ESC не имеет жесткой или мягкой отсечки используйте отсечку на 3.0 вольт на ячейку. Вы будете понимать, когда летаете, что пора на зярядку, когда испытаете внезапное падение мощности вызванное срабатыванием отсечки LVC.
Если ваш регулятор имеет автоматический режим лития. Используйте его и он будет правильно понимать количество ячеек. Установите автоматическое Cutoff (обрезание) соответствующим образом.
Если вы уже летали с никель-кадмиевыми или никель-металлогидридными аккумуляторами, перейдя на литий-полимерный вы будете использовать другое количество ячеек. Если вы использовали 6-7 , то это 2 ячеечная литий-полимерная батарейка. Если вы использовали 10-11 ячейковые, то это станет 3 ячейковой литий-полимерной батарейкой. Есть два варианта решений летчиков , которые использовали 8 ячеек , которые застряли между 2 и 3 ячеечными литий-полимерными батарейками. По моему опыту лучше определить сколько ватт вы использовали и дублировать эти значения на lipo , двигатель. Например: Вы использовали 8 ячеек NiCd (9.6 вольт) на 10 ампер , на скоости 400 у самолета. У вас есть 9,6*10 = 96 Ватт Если вы перейдете на 2 (2S) ячейкову батарейку (7.2 вольта номинал), то вы должны изменить свой пропеллер так, что бы вы могли использовать 13А. Если вы перешли на 3 (3S) ячейковую батарейку (10.8 вольт номинал), то вы должны уменьшить силу тока до 8.9А. Эти расчеты являются приблизительными и некоторое экспериментирование требуется для достижения лучших результатов, но сохраняя потребленния Ватт является хорошим способом для начала.
Понимание конвенций
Как быстро может разряжаться батраейка — это и есть максимальный ток разряда. Ток оценивается параметром С для аккумулятора. С — сколько времени требуется, чтобы разрядить аккумулятор в долях часа. Например 1C разряжает батарею в 1/1 часа или за 1 час. 2С разряжает батарею за полчаса. Все хоббийные батареи рассчитаны в милли ампер-часов. Если аккумулятор рассчитан на 2000 мАч и вы разряжаете его током 2000mA (или 2А, 1А = 1000mA) он будет полностью разряжен в течение одного часа. Параметр C батареи показывает на способность разряда. Ячейка емкостью 2000mAh разряжается током 2 ампер — идет разрядка в 1С (2000mA х 1), ячейка 2000mAh разряжаемая токов на 6 ампер — идет разрядка на 3С (2000mA х 3).
Все батареи имеют ограничения относительно того, как быстро они разряжаться. Из-за этого многие LiPo батареки ставятся параллельно, чтобы увеличить силу тока у аккумулятора. Когда 2 батареи подключены плюс к плюсу, а минус к минусу они становятся как одной батареи с двойной мощностью. Если у вас есть две 2000mAh ячейки и вы подключить их параллельно, то результат будет таким же, как одна на 4000mAh. Эта ячейка на 4000mAh имеет такой же параметр токаотдачи C как и оригинальная ячейка на 2000mAh. Таким образом, если ячейки на 2000mAh могут дать токоотдачу в 5С максимум, или 10 ампер, то свежесобранная ячейка в 4000mAh может выдавать 5С или (4000mA х 5) 20 ампер. Такой метод подключения аккумуляторов позволяет использовать более высокие токи.
Соглашение об именах, которое позволяет расшифровать, сколько ячеек параллельно и сколько в серии является метод XSXP. Число перед S показывает количество последовательно соединенных ячеек у батарейки, например 3S означает, что это 3-секционная батарейка. Число перед P означает количество параллельно соединеных ячеек. Так 3S4P батарейка на 2100mAh имеет в общей сложности 12 ячеек внутри. Она будет иметь напряжение как и любая другая батарейка 3S, так как число ячеек определяет напряжение. И она будет иметь больше токоотдачу в 4 раза больше из-за 12 отдельных ячеек. Так сказать, наша 3S4P батарейка будет иметь максимальный расход в 6С. Это означает, что она имеет номинальное напряжение 10,8 вольт (3 × 3,6), а максимальная скорость разряда 50,4 ампер (2100mAh х 6Cx4P).
Какой lipo аккумулятор следует покупать?
Сейчас очень много вариантов и из-за этого сложно расшифровать , что бренд, а что ложь. Производители батарей постоянно пытаются друг до друга в чем-то упрекнуть и что-то взять. В то время как капитализм может снизить цены, он также может служить поводом для ложных утверждений о продуктах.
Один отличный способ узнать, что данная батарея лучше — это посмотреть на графики производительности батареи. Глядя на то, как напряжение ячейки падает при различных нагрузках даст вам хорошу метрику для сравнения с аналогичными размером / весом другой батареи.
Если вы не можете разобраться в груфиках, то посмотрите на то, что используют другие люди в успешных инсталяциях, которые похожи на ваши. Если много людей сообщают о длительном времени полета и большого запаса энергии то вы можете сделать тоже самое — выбрать эту батарею
Платить что бы узнать сколько ватт, вольт и ампер? Понимание этих концепций выходит за рамки этой статьи, но может служить вам, что бы понять , что аккумулятор лучше.
Для квадрокоптеров и других летательных аппаратов следует расчитать максимальный ток потребления, если у вас установлено четыре регулятора ESC на 30А и моторы потребляют 30А максимально, то максимальный ток потребления будет 30*4 = 120А . Если у Вас имеется батарея на 5000мА то её параметр С должен быть не меньше 120/5А = 30С . Выбрав батарейку с диапазоном разряда 20-60С вы рискуете на последних минутах разряда её потерять необходимую мощность , которая будет уже 20С. Обращайте на это внимание при расчете потребления тока. Полетный контроллер и другое оборудование потребляют не так много.
Последнее замечание о выборе аккумулятора. Аккуратнее с дешевыми аккумуляторвми. Убедитесь, что ваши батареи способны работать и что уровень силы тока тот, который вы планируете использовать. Не перегружайте нагрузкой батарею — это может не только привести к её выходу, но и повлиять на полета (просаживание мощности). Лучше купите хорошую батарею, чем нужно, чем разбить свой аппарат.
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала