

Есть два способа изменить направление вращения моторов в коптере. Можно поменять два любых провода из трех идущих к мотору или изменить настройки в программе. Сегодня мы этим и займемся.
- Убеждаемся, что моторы вращаются в нужную сторону
- Меняем местами два провода
- Меняем направление вращения при помощи настроек BLHeliSuite
- Часть 1. Что такое квадрокоптер
- Структурная схема квадрокоптера
- Оси квадрокоптера
- Управление квадрокоптером
- Стабилизация полета
- Дрон своими руками: Урок 3. Силовая установка.
- Введение
- 1. Мотор
- Brushed vs Brushless
- Inrunner vs Outrunner
- Дополнительные соображения
- 2. Несущие винты (Пропеллеры)
- Лопасти и диаметр
- Шаг/Угол Атаки/Эффективность/Тяга
- Вращение
- Материалы исполнения
- Складные
- Установка
- Защита несущих винтов
- Балансировка
- 3. ESC
- Подключение
- Прошивка
- Распределение питания
- 4. Аккумулятор
- Химия
- Напряжение
- Ёмкость
- Скорость разряда
- Безопасность
- Зарядка
- Монтаж
- 📽️ Видео
Видео:Направление вращения моторов квадракоптераСкачать

Убеждаемся, что моторы вращаются в нужную сторону
Если вы собираете новый коптер, то перед установкой пропов нужно убедиться, что все моторы вращаются в правильном направлении. Если один или несколько моторов работают неправильно, тогда коптер перевернется при попытке взлететь.
Вот расположение моторов и их направление вращения, принятое в Betaflight.
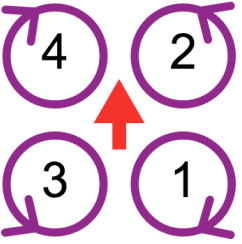
Если направление какого-то мотора не совпадает с указанным на картинке, тогда вам поможет один из нижеприведенных способов.
Видео:КАК НАДЕВАТЬ ПРОПЕЛЛЕРЫ на FPV квадрокоптер. Направление вращения моторовСкачать

Меняем местами два провода
Если поменять два ЛЮБЫХ провода из 3-х идущих к мотору от регулятора, то направление вращения мотора изменится. Не важно какие провода вы поменяете, результат всегда будет одинаковым.
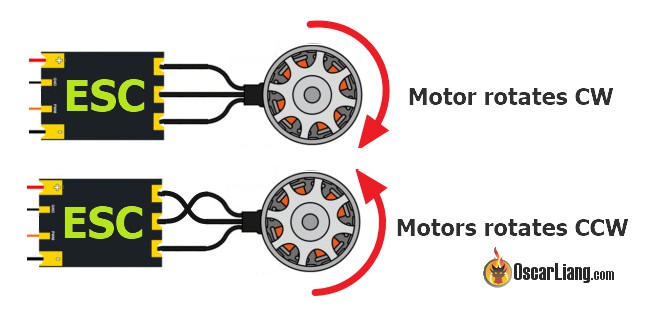
Переподключаем два провода, чтобы изменить направление вращения мотора
Видео:Настройка направления вращения моторов и регуляторовСкачать

Меняем направление вращения при помощи настроек BLHeliSuite
Если вам не хочется паять, то направление можно изменить в настройках прошивки BLHeli (если конечно ваши регуляторы работают под её управлением). BLHeliSuite — это программа-конфигуратор позволяет менять множество параметров прошивки, в том числе и направление вращения.
По умолчанию значение параметра «Motor Direction» будет «Normal«, чтобы поменять направление вращения, измените значение на «Reversed«. Есть и третий вариант — «3D», в этом случае моторы смогут вращаться в любом направлении, это нужно для акробатики (англ), не используйте этот вариант, если не уверены в том, нужен ли вам этот режим.
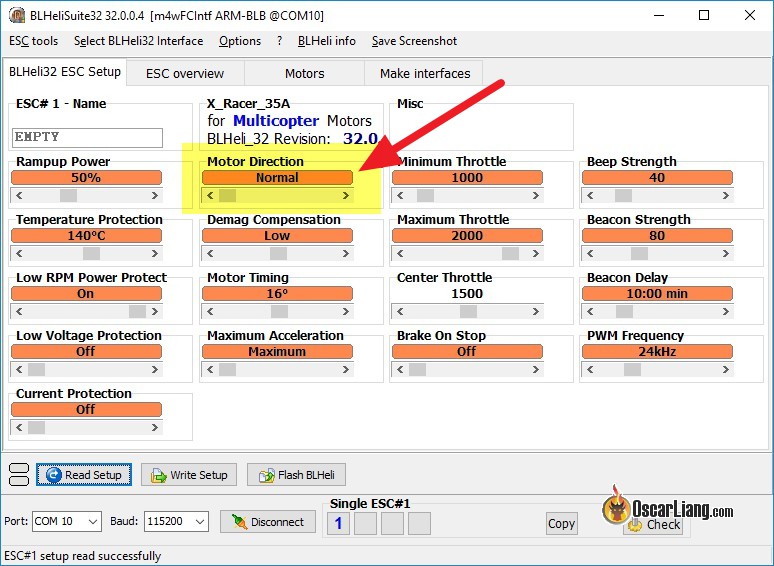
Изменение направления вращения мотора в BLHeliSuite
Видео:Принцип работы квадрокоптера. Пропеллеры, моторы, полетный контроллер, реактивный момент и другое.Скачать

Часть 1. Что такое квадрокоптер
Создание мультироторных летающих аппаратов — очень увлекательное занятие! Они сравнительно просты в сборке и управлении, но имеют свои особенности. В первой статье цикла мы постарались собрать базовые знания об устройстве и принципах полета квадрокоптера.
Это первая часть из цикла статей о квадрокоптерах, в которой я постараюсь максимально подробно объяснить как устроена и как летает простейшая мультироторная платформа.
Видео:Замена моторов и камеры в FPV квадрокоптере. Настройка вращения моторов.Скачать

Структурная схема квадрокоптера
Есть множество способов конфигурации двигателей: трикоптер, гексакоптер, октокоптер, но самый простой из них в сборке и управлении, это квадрокоптер, то есть мультироторная платформа с четырьмя двигателями. Мы построили именно квадрокоптер, поэтому будем рассматривать его. В свою очередь квадрокоптер может иметь + и Х- конфигрурацию. У «+»-коптера один из лучей направлен вперед, у «Х»-платформ основное направление находится между двумя соседними лучами. Эти два типа не отличаются друг от друга ничем, кроме того что на последнем проще закрепить камеру так, чтобы в ее поле зрения не попадали работающие винты. Поэтому наш коптер имеет «Х»-ориентацию.
Сразу скажу, что все изложение будет привязано к тому оборудованию, которое используем мы. Это проверенное сочетание устройств, которое мы рекомендуем и вам, так как они наиболее широко распространены, доступны и получает даже на первых парах получить неплохую стабильность полета. Подробное описание использованного оборудования вы сможете найти в следующей статье цикла.
На структурной схеме весьма условно все составляющие части нашего квдрокоптера. Красным цветом показаны цепи питания и черным — линии данных. На структурной схеме показаны те элементы, которые используем мы. Вид сверху:
Структурная схема квадрокоптера
Управление коптером осуществляется при помощи пульта управления, который передает команды радиоприемнику. Мы используем пульт Turnigy 9x. Сами модули радиоканала могут быть приобретены отдельно и установлены в совместимый пульт, но гораздо чаще используются готовые решения пульт с радиомодулем+приемник. Пульт питается от батареек, а радиоприемник получает питание от Полетного контроллера. Связь односторонняя, только от пульта к приемнику. Обычно приемник подключается к полетному контроллеру четырьмя проводами, по которым передаются сигналы поворота вокруг трех осей и команда «газа».
Задача полетного контроллера — переводить команды от пульта управления в сигналы задающие обороты двигателя. Также в нем установлены инерциальные измерительные датчики, позволяющие следить за текущим положением платформы и выполнять автоматические регулировки. Мы используем полетный контроллер DJI NAZA. который состоит из двух блоков. В первом из них находится стабилизатор питания и светодиод, отображающий статус. Во втором (основном) — непосредственно управляющая электроника. Разделение частей полетного контроллера обусловлено тем, что второй блок при установке должен быть размещен в строго определенном месте, а второй блок там, где оператору будет видно светодиод статуса.
ESC — это регуляторы оборотов электродвигателей. Дело в том, что в квадрокоптерах используют специальные бесколлекторные, которые способны работать на очень больших оборотах. Для управления этими двигателями необходимо формировать трехфазное напряжение и относительно большие токи, чем и занимаются регуляторы оборотов. Для каждого двигателя необходим свой регулятор оборотов. Для управления регуляторами оборотов принят такой же сигнал как и для сервоприводов, то есть импульсы следующие с частотой 50Гц и длительностью, меняющейся от 0,8 до 2,1мс. Чем длиннее управляющий импульс, тем выше обороты двигателя. Все четыре регулятора оборотов подключаются к полетному контроллеру. Питаются регуляторы непосредственно от аккумулятора. Обычно регуляторы имеют встроенный стабилизатор на 5В, который в коптерах используется редко. Этот стабилизатор необходим, когда нужно подключить регулятор напрямую к приемнику, в тех случаях когда двигатель только один (например, в авиамоделях).
Каждый двигатель подключен к своему регулятору оборотов тремя проводами. Последовательность подключения проводов определяет направление вращения двигателя.
Аккумулятор питает регуляторы и полетный контроллер. В строительстве коптеров применяют специализированные литий-полимерные аккумуляторы, о которых мы отдельно потом расскажем позже. Обратите внимание на подключенный к аккумулятору тестер. Когда заряд аккумулятора подходит к концу он издает звуковой сигнал оповещения. Летать без него очень опасно, так как можно испортить аккумулятор.
Видео:✔ Обратное вращение (реверс) моторов. Зачем это нужно? Теория и настройка [Inverted Prop Rotation]Скачать
![✔ Обратное вращение (реверс) моторов. Зачем это нужно? Теория и настройка [Inverted Prop Rotation]](https://i.ytimg.com/vi/2Gj0iYAquY0/0.jpg)
Оси квадрокоптера
Есть много терминов, обозначающих оси и вращающие моменты коптера (и любого другого летающего аппарата). Все многообразие возможных движений коптера мы попытались собрать на одной иллюстрации:
Отличную анимацию на эту тему можно посмотреть здесь. Термины для обозначения пришли из авиации.
Throttle — переводится как «дроссель», «тяга» или «газ» в обиходе. В планерах «газ» определяет скорость движения вперед, то есть вектор силы приложен вдоль оси X. В коптерах он управляет подъемом платформы, то есть вдоль оси «Z».
Rudder, или «руль направления». У крылатых аппаратов это часть хвостового оперения, которая позволяет самолету поворачивать. В коптерах этим словом также обозначают управление носом платформы.
Elevator, или «руль высоты». В самолетах также находится в хвосте и позволяет задрать или опустить нос и, тем самым, снизиться или набрать высоту. В коптерах манипуляции с этим моментом силы позволяет коптеру двигаться вперед или назад.
Aileron, или «элероны». Часть конструкции крыла которая позволяет управлять креном самолета. Коптер за счет крена может двигаться боком влево или вправо.
Все эти термины применяются одновременно, но наиболее корректны названия моментов вращения Yaw, Pitch, Roll. Эти обозначения используются при работе с матрицами вращения.
Видео:О моторах и пропеллерах для начинающихСкачать

Управление квадрокоптером
Полет контролируется стиками пульта. в предыдущем разделе показано соответствие движений стиков, движениям коптера. Однако важно понимать, как именно достигается движение в том или ином направлении. А происходит это за счет изменения тяги двигателей. Пояснить это проще всего при помощи рисунка:
Управление перемещением квадрокоптера
Структурная схема коптера фактически продиктована особенностями управления полетом. Например, моторы обязательно должны попарно вращаться навстречу друг другу. В противном случае платформа начнет закручиваться. Становится очевидна необходимость использования полетного контроллера. Когда оператор двигает стик газа вверх происходит одновременное увеличение оборотов всех двигателей. Для поворота носа платформы необходимо отклонить один стик горизонтально, а полетный должен увеличить обороты одной пары двигателей и замедлить для второй.
Теоретически можно подключить регуляторы непосредственно к приемнику. Каждый стик будет управлять тягой одного двигателя. Но совершенно невозможно вообразить себе каким мастерством должен обладать оператор совершить какое-нибудь подобие управляемого полета.
Видео:Дроны | Полная динамика полетаСкачать

Стабилизация полета
Помимо преобразования команд оператора в команды двигателя полетный контроллер стабилизирует полет платформы. Стабилизация необходима по нескольким причинам:
- неидентичность винтомоторных групп (ВМГ)
- неидентичность регуляторов оборотов
- неравномерность распределения нагрузки на двигатели из-за смещения центра тяжести
- «сдувание» ветром
Читайте также: Моторы для пылесосов supra
Для компенсации этих воздействий в составе полетного контроллера есть инерциальная измерительная система, которая включает в себя акселерометр, гироскоп, магнитометр и барометр. В более дорогих моделях дополнительно используют GPS-приемники. Даже в те моменты когда оператор пытается просто удерживать коптер на месте полетный контроллер продолжает активно менять двигатель тягу двигателей компенсируя все возможные ускорения и вращения.
Ссылки на остальные части цикла статей о квадрокоптерах:
Часть 2. Элементы квадрокоптера
Часть 3. Все об аккумуляторах для квадрокоптеров
Часть 4. Рама квадрокоптера
Часть 5. Подсветка коптера
Часть 6. Подключение элементов квадрокоптера
Часть 7. Настройка пульта Turnigy9x для коптера
Часть 8. Настройка регуляторов оборотов бесколлекторного двигателя
Часть 9. Настройка полетного контроллера DJI NAZA
Часть 10. Гиростабилизированный подвес для камеры SJ4000
Видео:Уроки Arduino - управление бесколлекторным моторомСкачать

Дрон своими руками: Урок 3. Силовая установка.
Видео:БЕСКОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ. Как работает? Чем отличаться от щёточного? #бесколлекторный #МОТОРСкачать

Введение
Теперь, когда вы выбрали или построили раму, следующим шагом будет выбор правильной силовой установки. Так как большинство существующих дронов являются электрическими, мы сосредоточимся на создании исключительно электрической тяги посредством бесколлекторных моторов постоянного тока. В состав силовой установки входят моторы, несущие винты (пропеллеры, сокр. пропы), ESC и аккумуляторная батарея.
Видео:Характеристики двигателей RC моделей. Электромотор. Щёточные и бесщёточные моторы. ESC. Что такое KVСкачать

1. Мотор
От того какие моторы вы будете использовать в своей сборке, будет зависеть, какую максимальную нагрузку сможет поднять дрон, а также сколько времени он сможет находиться в полёте. Силовая установка должна обязательно состоять из моторов одной марки и модели, такой подход обеспечит ей сбалансированную работу. При этом стоит отметь, что даже абсолютно одинаковые (Бренд/Модель) моторы могут иметь незначительную разницу в скорости, которую в последующем выравнивает полётный контроллер.
Brushed vs Brushless
В коллекторных (Brushed) моторах ротор с обмоткой вращается внутри статора на котором магниты зафиксированы жёстко. В бесколлекторных (Brushless) моторах всё на оборот; обмотка крепится жёстко к внутренней части статора, а магниты установлены на валу и вращаются. В большинстве случаев вы будете рассматривать только бесколлекторные моторы (БК) постоянного тока. Моторы такого типа широко используются в индустрии радиолюбителей при сборке различных продуктов, начиная от вертолётов и самолётов и заканчивая системами привода в автомобилях и катерах.

Бесколлекторные моторы типа «Pancake» имеют больший диаметр, они более плоские и как правило имеют высокий крутящий момент и более низкое значение KV (детали ниже). В БПЛА небольших размеров (обычно размером с ладонь) чаще всего используют маленькие коллекторные моторы из-за более низкой цены и простого двухпроводного контроллера. Несмотря на то, что бесколлекторные моторы могут быть разных размеров и иметь разные характеристики, выбор меньшего размера совсем не означает, что будет дешевле.
Inrunner vs Outrunner
Существует несколько типов бесколлекторных моторов постоянного тока:
- Inrunner – внутренний ротор. Обмотка зафиксирована на статоре, магниты установлены на валу ротора, который вращается (как правило используются на радиоуправляемых лодках, вертолётах и автомобилях из-за высокого KV).
- Outrunner – наружный ротор. Магниты зафиксированы на статоре, который вращается вокруг неподвижной обмотки. Нижняя часть мотора зафиксирована. (как правило, у моторов такого типа больше крутящего момента).
- Hybrid Outrunner – технически это «Outrunner», но реализованный в корпусе «Inrunner». Такой подход позволил объединить в одном типе крутящий момент «Outrunner» и отсутствие внешних вращающихся элементов как у моторов типа «Inrunner».
Рейтинг KV – макс. число оборотов, которое может развить мотор без потери в мощности при заданном напряжении. Для большинства многороторных БЛА актуально низкое значение KV (например, от 500 до 1000), поскольку это способствует обеспечению стабильности. В то время как для акробатического полёта будет актуальным значение KV между 1000 и 1500, в тандеме с несущими винтами (пропеллерами) меньшего диаметра. Допустим, значение KV для конкретного мотора составляет 650 об/вольт, то при напряжении в 11.1В мотор будет вращаться со скоростью: 11.1 × 650 = 7215 об/мин, а если вы будете использовать мотор при более низком напряжении (скажем, 7.4В), то частота вращения составит: 7.4 × 650 = 4810 об/мин. При этом важно отметить, что использование низкого напряжения, как правило означает, что потребление тока будет выше (Мощность = Ток × Напряжение).
Некоторые производители бесколлекторных моторов могут указывать в спецификации информацию о максимально возможной тяге (Thrust) создаваемой мотором в купе с рекомендуемым несущим винтом. Единицей измерения тяги, как правило, являются килограмм (Кг/Kg), фунт (Lbs) или Ньютон (N). Например, если вы строите квадрокоптер и вам известно, значение тяги отдельно взятого мотора = до 0.5кг в купе с 11-дюймовым несущим винтом, то на выходе четыре таких мотора смогут поднять на максимальной тяге: 0.5кг × 4 = 2кг. Соответственно, если общий вес вашего квадрокоптера составляет чуть менее 2кг, то c такой силовой установкой он будет взлетать только на максимальных оборотах (макс. тяге). В данном случае будет актуальным, либо выбрать более мощную связку «мотор + несущий винт», которые позволят обеспечить большую тягу, либо уменьшить общую массу беспилотника. При макс. тяге силовой установки = 2кг, вес дрона должен составлять не более половины этого значения (1кг, включая вес самих моторов). Аналогичный расчёт можно сделать для любой конфигурации. Предположим, что вес гексакоптера (включая раму, моторы, электронику, аксессуары и т.д.) составляет — 2.5кг. Значит каждый двигатель для такой сборки должен обеспечивать (2.5кг ÷ 6 моторов) × 2 = 0.83кг тяги (или более). Теперь вы знаете как рассчитать оптимальную тягу моторов исходя из общего веса, но прежде чем принимать решение, предлагаем ознакомиться с разделами ниже.
Дополнительные соображения
- Разъёмы: у коллекторных моторов постоянного тока доступно два разъёма «+» и «-». Смена проводов местами меняет направление вращения мотора.
- Разъёмы: бесколлекторные моторы постоянного тока имеют три разъёма. Чтобы узнать как их подключить, а также как изменить направление вращения, обратитесь к разделу «ESC» ниже.
- Обмотки: обмотки влияют на KV моторов. Если вам необходимо наиболее низкое значение KV, но при этом в приоритете крутящий момент, будет лучшим обратить своё внимание на бесколлекторные моторы постоянного тока типа «Pancake».
- Монтаж: у большинства производителей есть общая схема монтажа для БК моторов постоянного тока, которая позволяет компаниям, производящим рамы не прибегать к изготовлению так называемых адаптеров. Шаблон как правило метрический, с двумя отверстиями разнесёнными на 16мм друг от друга, и ещё двумя отверстиями, разнесёнными на 19мм (под углом 90° к первому).
- Резьба: монтажная резьба, используемая для крепления бесколлекторного мотора к раме, может варьироваться. Обычные метрические размеры винтов М1, М2 и М3, имперские размеры могут быть 2-56 и 4-40.
Видео:Игорь Егоров. Устройство квадрокоптераСкачать

2. Несущие винты (Пропеллеры)
Несущие винты (пропеллеры, сокр. пропы) для многороторных БЛА берут своё начало от винтов радиоуправляемых самолётов. Многие спросят: почему бы не использовать лопасти вертолёта? Несмотря на то, что это уже было сделано, представьте себе размеры гексакоптера с лопастями от вертолёта. Также стоит отметить, что вертолётная система требует изменения шага лопастей, а это существенно усложняет конструкцию.
Вы также можете спросить, почему бы не использовать турбореактивный двигатель, турбовентиляторный двигатель, турбовинтовой двигатель и т.д? Безусловно они невероятно хороши для обеспечения большой тяги, но при этом требуют большое количество энергии. Если первостепенной задачей беспилотника является очень быстрое перемещение, а не зависание в ограниченном пространстве, один из выше перечисленных двигателей может быть хорошим вариантом.
Лопасти и диаметр
Несущие винты большинства мультироторных БЛА имеют две, либо три лопасти. Наибольшее применение получили винты с двумя лопастями. Не думайте, что добавление большего количества лопастей автоматически приведёт к увеличению тяги; каждая лопасть работает в потоке, возмущенном предыдущей лопастью, снижая КПД пропеллера. Несущий винт малого диаметра имеет меньшую инерцию и следовательно его легче ускорять и замедлять, что актуально при акробатическом полёте.


Шаг/Угол Атаки/Эффективность/Тяга
Тяга, создаваемая несущим винтом, зависит от плотности воздуха, числа оборотов винта, его диаметра, формы и площади лопастей, а также от его шага. Эффективность винта связана с углом атаки, который определяется как шаг лопасти минус угол спирали (угол между результирующей относительной скоростью и направлением вращения лопасти). Сама эффективность — это отношение выходной мощности к входной. Большинство хорошо спроектированных винтов имеют КПД более 80%. На угол атаки влияет относительная скорость, поэтому пропеллер будет иметь разную эффективность при разных скоростях мотора. На эффективность также сильно влияет передний край лопасти несущего винта, и очень важно, чтобы он был максимально гладким. Несмотря на то, что конструкция с переменным шагом была бы наилучшей, дополнительная сложность, необходимая по сравнению с присущей многороторной простотой, означает, что пропеллер с переменным шагом почти никогда не используется.
Читайте также: 128 мотор 16 клапанный гнет ли


Вращение
Несущие винты рассчитаны на вращение по часовой стрелке (CW), либо против часовой стрелки (CCW). На направление вращения указывает наклон лопасти (смотреть на пропеллер с торца). Если правая кромка лопасти выше — CCW, если левая кромка — CW. Если конструкция вашего беспилотника подразумевает перевёрнутое расположение моторов (как в случае с конфигурациями Vtail, Y6, X8) обязательно измените направление вращения несущих винтов, чтобы тяга была направлена вниз. Лицевая сторона несущего винта всегда должна быть обращена к небу. Документация которая идёт с контроллером полёта как правило содержит информацию о направлении вращения каждого винта, для каждой поддерживаемой контроллером многомоторной конфигурации.

Материалы исполнения
Материал(ы), используемые для изготовления несущих винтов (пропеллеров), могут оказывать умеренное влияние на лётные характеристики, но безопасность должна быть главным приоритетом, особенно, если вы новичок и не опытны.
- Пластмасса (ABS/Нейлон и т.д.) — является самым популярным выбором, когда речь заходит о многомоторных БЛА. Во многом это связано с низкой стоимостью, достойными лётными характеристиками и показательной долговечностью. Как правило в случае краша, по крайней мере, один пропеллер оказывается сломанным, и пока вы осваиваете дрон и учитесь летать, у вас всегда будет много сломанных пропов. Жёсткость и ударопрочность пластикового винта может быть улучшена посредством усиления углеродным волокном (карбон), такой подход макс. результативен и не так дорог по сравнению с винтом полноценно исполненным и карбона.

- Фиброармированный полимер (углеродное волокно, нейлон усиленный карбоном и т.д.) — является «передовой» технологией во многих отношениях. Детали из углеродного волокна всё ещё не очень просты в изготовлении, и поэтому вы платите за них больше, чем за обычный пластиковый винт с аналогичными параметрами. Пропеллер изготовленный из углеродного волокна сложнее сломать или согнуть, и, следовательно, при краше, он нанесёт больший ущерб всему, с чем соприкоснётся. Одновременно с этим, карбоновые винты, как правило, хорошо сделаны, более жёсткие (обеспечивают минимальные потери в эффективности), редко требуют балансировки и имеют более лёгкий вес по сравнению с любыми другими материалами исполнения. Такие винты рекомендуется рассматривать только после того, как уровень пилотирования пользователя станет комфортным.

- Дерево — редко используемый материал для производства несущих винтов многороторных БЛА, поскольку для их изготовления требуется механическая обработка, которая в последствии делает деревянные пропеллеры дороже пластиковых. При этом дерево вполне прочное и никогда не гнётся. Отметим, что деревянные пропеллеры всё ещё применяют на радиоуправляемых самолётах.

Складные
Складные пропы имеют центральную часть, которая соединяется с двумя поворотными лопастями. Когда центр (который соединен с выходным валом мотора) вращается, центробежные силы действуют на лопасти, выталкивая их наружу и по существу делая пропеллер «жёстким», с тем же эффектом, что и классический не складываемый винт. Из-за низкого спроса и большого количества требуемых деталей, складные пропеллеры встречаются реже. Основное преимущество складных пропов это компактность, а в сочетании со складной рамой, транспортировочные размеры дрона могут быть значительно меньше полётных. Сопутствующим преимуществом складного механизма является отсутствие необходимости, при краше, менять винт целиком, достаточно будет заменить только повреждённую лопасть.

Установка
Как и БЛА, несущие винты могут имеют широкий диапазон размеров. Таким образом, в этой отрасли существует целый ряд «стандартных» диаметров вала двигателя. В связи с чем несущие винты часто поставляются с небольшим набором переходных колец (выглядят как шайбы с отверстиями разного диаметра в центре), которые устанавливают в центральное посадочное отверстие пропа, в случае если диаметр отверстия несущего винта оказался больше диаметра вала используемого мотора. Так как не все разработчики комплектуют пропы набором таких переходных колец, рекомендуется заблаговременно сверять диаметр отверстия приобретаемых пропов с диаметров вала вашего мотора.
Фиксироваться винт на моторе может исходя из того, какой из способов крепления поддерживает ваш мотор. Если вал мотора не подразумевает никаких вариантов крепежа (резьб. соединение, различные приспособления для крепления и т.д.), в таком случае применяются специальные адаптеры, такие как пропсейверы и цанговые зажимы.
- Пропсейвер – представляет из себя втулку с боковыми симметрично расположенными отверстиями в которые вкручены винты. Втулка надевается на вал мотора и фиксируется боковыми винтами. Поверх втулки устанавливается пропеллер который в свою очередь фиксируется резиновым кольцом идущим в комплекте с втулкой (как правило в комплекте их несколько). Из-за своей ненадёжности, но в тоже время быстрого монтажа, лучше всего подходят для проведения кратковременных тестовых полётов в процессе сборки беспилотника.
- Цанговый зажим – по сравнению с пропсейвером является более сбалансированным и надёжным адаптером. Цанговый зажим состоит из разрезной конусообразной втулки с резьбовым соединением (Цанга), зажимной втулки, шайбы и кок-гайки. Сначала на вал мотора одевается цанга, затем зажимная втулка, после идут несущий винт (пропеллер) с шайбой, замыкает конструкцию зажима кок-гайка.
Бесколлекторные моторы с наружным ротором (типа «Outrunner») как правило, в верхней его части, имеют несколько резьбовых отверстий рассчитанных под установку различных адаптеров и креплений. Не менее популярным вариантом крепления пропеллера на валу БК мотора является самозатягивающая гайка. Вал такого мотора на конце имеет резьбу, направление которой противоположно направлению вращения ротора. Такой подход исключает самопроизвольное откручивание фиксирующей гайки, обеспечивая безопасную и надежную эксплуатацию дрона.
Защита несущих винтов
Защита несущих винтов – призвана исключить прямой контакт силовой установки БЛА с встречным объектом, сохранив тем самым её целостность и работоспособность, а также не допустить получение травм о быстро вращающиеся пропеллеры в результате столкновения с людьми и животными. Защита пропеллеров крепится к основной раме. В зависимости от варианта исполнения может как частично перекрывать рабочую зону силовой установки, так и полностью (кольцевая защита). Защита винтов чаще всего применяется на небольших (игрушечных) БЛА. Применение в сборке элементов защиты несёт и ряд компромиссов, среди которых:
- Может вызывать избыточную вибрацию.
- Как правило выдерживает не сильные удары.
- Может понизить тягу, если под пропеллером размещено слишком много крепёжных опор.

Балансировка
Неудовлетворительная балансировка имеет место быть у большинства недорогих пропеллеров. Чтобы в этом убедиться, далеко ходить не надо, достаточно вставить в центральное посадочное отверстие винта карандаш (как правило при дисбалансе одна сторона будет тяжелее другой). В связи с чем настоятельно рекомендуется проводить балансировку своих пропов, перед тем как устанавливать их на моторы. Несбалансированный пропеллер будет вызывать избыточные вибрации, которые в свою очередь отрицательно влияют на работу полётного контролера (проявляется в некорректном поведении дрона в полёте), не говоря уже об увеличении шумности, повышенном износе элементов силовой установки и ухудшении качества съёмки подвешенной камеры.

Пропеллер может быть уравновешен разными способами, но если вы строите беспилотник с нуля, то в арсенале инструментов обязательно должен быть недорогой балансир пропеллеров, позволяющий легко и просто определять дисбаланс веса в винте. Для выравнивания веса, вы можете либо отшлифовать наиболее тяжёлую часть пропа (равномерно шлифуется центральная часть лопасти, и не в коем случае не отрезайте часть пропеллера), также можно балансировать путём наклеивания отрезка скотча (тонкий) на более лёгкую лопасть (добавляете отрезки равномерно до тех пор пока не будет достигнут баланс). Обратите внимание, что чем дальше от центра вы делаете балансировочную модернизацию (шлифование или добавление ленты) пропеллера, тем больше будет эффект, основанный на принципе крутящего момента.
Видео:RDLF650. Сборка квадрокоптера. Проверка направления вращения мотора без пайки [Часть 1a]Скачать
![RDLF650. Сборка квадрокоптера. Проверка направления вращения мотора без пайки [Часть 1a]](https://i.ytimg.com/vi/Jqeo18kD2ow/0.jpg)
3. ESC
ESC (англ. Electronic Speed Controller; рус. электронный контроллер скорости) — позволяет полётному контроллеру управлять скоростью и направлением вращения мотора. При правильном напряжении, ESC должен выдерживать макс. ток, который может потреблять мотор, а также ограничивать ток проходящий через фазу при коммутации. Большинство ESC, применяемых в беспилотном хобби, позволяют мотору вращаться только в одном направлении, однако с правильной прошивкой они могут работать в обоих направлениях.

Читайте также: Лодочные моторы сеа про в рассрочку
Подключение
Изначально ESC может сбивать с толку, потому что для его подключения доступно несколько проводов/контактов/коннекторов, доступных с двух сторон (ESC может приходить как с уже припаянными коннекторами, так и без).
- Подача питания: два толстых провода (обычно чёрный и красный) предназначены для подачи питания от распределительной платы/жгута проводов к которым питание приходит непосредственно от основной аккумуляторной батареи дрона.
- 3 коннектора: С противоположной стороны контроллера доступны три коннектора предназначенные для соединения с тремя пулевидными коннекторами (как правило идут в комплекте с моторами) на бесколлекторном моторе. Применение коннекторов при подключении ESC позволяет при необходимости (в случае сбоя) осуществить быструю смену контроллера без использования паяльника. Бывает, что пулевидные коннекторы идущие с мотором не соответствуют коннекторам на регуляторе, в таком случае просто замените на подходящие. Какой из трёх «плюс», а какой «минус»? Ориентир простой, приходящий плюсовой провод от батареи, переходит в плюсовой на ESC, аналогично и с минусом.
- 3-контактный R/C servo разъём с тонкими проводами: посредством которых осуществляется обработка сигнала поступающего от приёмника, из которых один провод является сигнальным (передача сигнала газа к ESC или вход), второй «минус» (или земля), и плюсовой провод (не задействуется, если отсутствует встроенный BEC; при встроенном BEC является выходом 5В питания, который в последствии можно использовать для питания бортовой электроники).
Во времена зарождения авиамоделизма в качестве силовой установки использовался двигатель внутреннего сгорания, а питание бортовой электроники осуществлялось от небольшой батареи. С приходом электрической тяги и регуляторов (ESC), в последние, стали включать так называемую цепь устранения батареи — BEC (на англ. Battery Eliminator Circuit; или преобразователь бортового питания; как правило, обеспечивает дополнительный источник тока напряжением 5В при силе тока 1А, либо выше). Иными словами это преобразователь напряжения используемой в сборке LiPo в напряжение для питания бортовой электроники беспилотника.
При сборке мультиротора необходимо подключить все ESC к контроллеру полёта, но потребуется только один BEC, иначе могут возникнуть проблемы при подаче питания на одни и те же линии. Поскольку обычно нет способа отключить BEC на ESC, лучше всего удалить красный провод (+) и обмотать его изолентой для всех ESC, кроме одного. Также важно оставить чёрный провод (земля) для общего заземления.
Прошивка
Не все существующие на рынке ESC одинаково хороши для применения в мультироторных сборках. Важно понимать, что до появления многомоторных БЛА, бесколлекторные моторы использовались в первую очередь в качестве силовой установки радиоуправляемых автомобилей, самолётов и вертолётов. Большинство из них не требуют быстрого времени отклика или обновления. ESC с встроенным программным обеспечением SimonK или BLHeli способны очень быстро реагировать на входящие изменения, что в целом предопределяет разницу между стабильным полётом или крашем.
Распределение питания
Поскольку каждый ESC питается от основной батареи, основной разъем АКБ должен быть как-то разделен на четыре ESC. Для этого используется плата распределения питания или жгут распределения питания. Эта плата (или кабель) разделяет положительные и отрицательные клеммы основного аккумулятора на четыре. Важно отметить, что типы разъёмов, используемых на аккумуляторе, ESC и распределительной плате, могут не совпадать, поэтому лучше по возможности выбирать «стандартный» разъём (например, Deans), который используется повсеместно. Многие недорогие платы могут требовать пайки, в данном случае пользователь решает сам какой конкретный разъём ему использовать в сборке. Самый простой распределитель питания может включать в себя два входных клеммных блока, либо пайку всех положительных соединений вместе, а затем всех отрицательных соединений вместе …
Видео:Типичная настройка дрона после сборки на примере 5" фристайлового квадрокоптера // lofi hip hopСкачать

4. Аккумулятор

Химия
Батареи, используемые в беспилотных летательных аппаратах, в настоящее время исключительно литий-полимерный (LiPo), причем состав некоторых из них бывает достаточно экзотичным — литий-марганцевые или другие варианты лития. Свинцовая кислота просто не подходит, а NiMh/NiCd все еще слишком тяжелы для своей ёмкости и часто не могут обеспечить требуемые высокие скорости разряда. LiPo предлагает высокую производительность и скорость разряда при небольшом весе. Недостатками являются их сравнительно высокая стоимость и постоянные проблемы с безопасностью (пожароопасны).
Напряжение
На практике вам потребуется только один аккумулятор для вашего БПЛА. Напряжение этой батареи должно соответствовать выбранным вами БК моторам. Почти все АКБ, используемые в наши дни, основаны на литии и содержат несколько элементов (банок) по 3.7В каждая, где 3.7В = 1S (т.е однобаночная АКБ; 2S – двух баночная и т.д.). Поэтому батарея с маркировкой 4S, вероятно, будет иметь номинальное значение: 4 × 3.7В = 14.8В. Также количество банок поможет вам определить, какое зарядное устройство необходимо использовать. Отметим, что однобаночная батарея большой ёмкости физически может выглядеть как многобаночная батарея низкой ёмкости.
Ёмкость
Ёмкость аккумуляторной батареи измеряется в ампер-часах (Ач). Аккумуляторы небольших размеров могут иметь ёмкость от 0.1Ач (100 мАч), ёмкость АКБ для беспилотных летательных аппаратов среднего размера может варьироваться от 2-3Ач (2000 мАч — 3000 мАч). Чем выше ёмкость, тем дольше время полёта, и соответственно тяжелей АКБ. Время полёта обычного БПЛА может находится в интервале 10-20 минут, что может показаться недолгим, но вы должны понимать, что беспилотник в процессе полёта постоянно борется с гравитацией, и в отличие от самолёта, он не имеет поверхностей (крыльев) обеспечивающих помощь в виде оптимальной подъёмной силы.
Скорость разряда
Скорость разряда от литиевой батареи измеряется в «C», где 1C — ёмкость батареи (обычно в ампер-часах, если вы не рассматриваете дрон размером с ладонь). Скорость разряда большинства LiPo батарей составляет не менее 5C (в пять раз больше ёмкости), но, так как большинство моторов, используемых в мультироторных БЛА, потребляют большой ток, батарея должна иметь возможность разряжаться при невероятно высоком значении тока, который, как правило, составляет порядка 30А или более.
Безопасность
LiPo АКБ не совсем безопасны, так как они содержат газообразный водород под давлением и имеют тенденцию гореть и/или взрываться, когда что-то не так. Таким образом, если у вас есть какие-либо сомнения относительно работоспособности аккумулятора, не в коем случае, не подключайте его к беспилотнику или даже к зарядному устройству — считайте его «списанным» и утилизируйте его надлежащим образом. Контрольные признаки того, что с аккумулятором что-то не так это вмятины или вздутие (т.е. утечка газа). При зарядке LiPo батареи лучше всего использовать безопасные LiPo ящики (Battery safe box). Хранение батареи также лучше осуществляться в этих ящиках. В случае краша, первое, что вам нужно сделать, это отключить и проверить аккумулятор. Батарея исполненная в боксе может увеличить вес, но при этом реально поможет защитить АКБ при краше. Некоторые производители продают аккумуляторы с жестким чехлом и без него.

Зарядка
Большинство LiPo аккумуляторов имеют два разъема: один предназначен для использования в качестве основных «разрядных» проводов, способных выдерживать большой ток, а другой, обычно меньшего размера и короче, является разъёмом для зарядки (как правило белый JST разъём), в котором один контакт соответствует заземлению, а остальные, количеству банок АКБ. Его вы подключаете к зарядному устройству, посредством которого осуществляется зарядка (и балансировка) каждой банки батареи. Зарядное устройство обязательно должно сообщать, когда зарядка завершена, и, учитывать проблемы безопасности связанные с литий-полимерными батареями. После окончания процесса зарядки, лучше всего сразу отсоединять аккумулятор от зарядного устройства.

Монтаж
Аккумуляторная батарея является самым тяжелым элементом беспилотника, поэтому её следует устанавливать в центральной мёртвой точке, чтобы обеспечить одинаковую нагрузку на моторы. Аккумуляторная батарея не подразумевает какого-либо специального монтажа (особенно саморезы, которые могут повредить LiPo и вызвать возгорание), поэтому некоторые используемые сегодня методы монтажа включают в себя ремни на липучке, резиновые, пластиковые отсеки и другие. Самым распространённым вариантом монтажа АКБ является подвешивание батареи под рамой с помощью ремня с липучкой.
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала
📽️ Видео
Ремонт мотора квадрокоптера - перемотка статораСкачать

Почему моторы набирают обороты при арме? Почему при посадке дрон прыгает/скачет?Скачать
Betaflight - настройка регуляторовСкачать
Силовая установка гоночного квадрокоптера - бесколлекторный мотор, регулятор, установка на рамуСкачать
Выбор мотора, а правильнее говоря ВМГСкачать
Квадрокоптер своими руками №-3 | Балансировка моторов и пропеллеровСкачать





