
В середине 90-х годов для обеспечения безопасности и комфорта на автомобиле «представительского» класса могло быть от 10 до 15 блоков управления.
В настоящее время такого количества блоков управления уже недостаточно, оно увеличилось, возможно, в два раза (или больше).
Такое стремительное увеличение количества блоков управления заставило производителей искать новые пути решения задач для поддержания бесперебойной и стабильной связи между блоками управления.
И в настоящий момент уже существуют следующие технологии передачи данных:
– шина LIN (однопроводная шина)
– шина MOST (оптоволоконная шина)
– беспроводная шина Bluetoot h
В данной статье мы рассмотрим шину LIN .
Шина под названием » LIN » — это сокращение от полного названия: » Local Interconnect Network «, то есть, «локальная коммутируемая сеть».
Это означает. что все коммутируемые блоки управлению подключены и располагаются в пределах одного ограниченного пространства, например, крыши автомобиля, двери автомобиля и так далее.
Обмен данными между коммутируемыми блоками системы LIN происходят по шине данных CAN .
У шины LIN есть особенность: она однопроводная.
Цвет изоляции провода — фиолетовый (на нем может быть цветная маркировка).
Толщина провода (площадь поперечного сечения) составляет около 0.35 мм2.
Провода шины LIN экранировать не обязательно.
Однако, как уже говорилось, скорости передачи данных по шине CAN и шине LIN различные.
Различными также являются и сигналы.
Для этого был придуман так называемый «Блок управления LIN-Master «, который является своеобразным «переводчиком» между шиной LIN и шиной CAN :
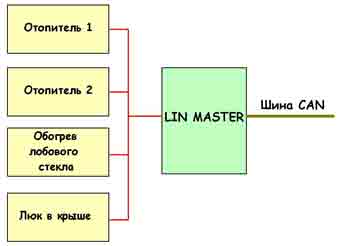
У этого блока существует довольно много задач:
— контроль передачи данных
— контроль скорости передачи данных
— постоянная диагностика работоспособоности всех блоков, подключенных к шине LIN
Итак, что такое LIN Master мы разобрались.
Но есть еще такое понятие, как LIN Slave .
Это не что иное, как исполнительные механизмы, электронные или электронномеханические узлы или блоки, получающие команды от блока LIN Master .
Но не только команды.
Может (и постоянно идет) опрос всех подключенных компонентов по текущему и фактическому состоянию, для своевременного обнаружения неисправности и возможности выполнять заданные функции.
Как видно из фото 1, для нескольких исполнительных механизмов требуется только один контакт () в блоке pin LIN Master .
Скорость передачи данных в шине LIN невысокая и составляет приблизительно от 5 до 25 кбит\сек.
Рецессивный уровень
Если на шину данных LIN не будет послана телеграмма или рецессивный бит, то на шину данных подается напряжение, практически равное напряжению аккумуляторной батареи.
Для передачи доминирующего бита по шине данных LIN в передающем блоке управления шина данных замыкается на массу через приемопередатчик (трансивер) — см. фото 2 :
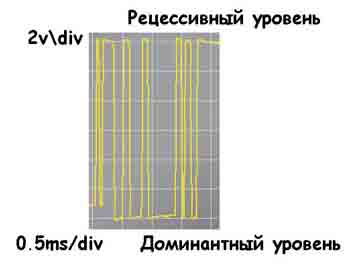
Надежность и стабильность передачи данных обеспечивается установлением определенных допусков в сигналах на рецессивном и доминантном уровнях.
Между блоками Slave и Master постоянно «курсируют» телеграммы определенной формы.
Читайте также: Шины кумхо 215 75 r16c
Блок управления LIN Master периодически посылает телеграммы, которые строго разделены на четыре составляющие:
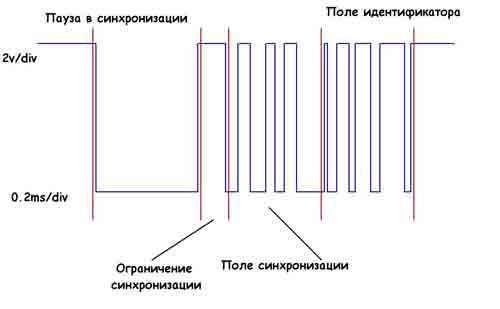
1 — пауза в синхронизации
2 — ограничение синхронизации
3 — поле синхронизации
4 — поле идентификатора
В посланной телеграмме, так называемая «пауза в синхронизации» нужна для того, что бы «сообщить» блокам о том, что посылается телеграмма. Минимальная пауза в синхронизации равняется времени передачи 13 битов. Пауза посылается с доминантным уровнем.
Поле синхронизации требуется для того, что бы все исполнительные блоки могли настроиться или проверить свои настройки перед приемом телеграммы — оно состоит из строго определенной последовательности битов 0101010101.
Русские Блоги
Обучение по шине LIN
Введение в LIN
LIN — это сокращение от Local Interconnect Network, это недорогой протокол последовательной связи, основанный на UART / SCI, универсальном интерфейсе асинхронного приемника / последовательной связи. Его можно использовать в различных областях, таких как автомобили, бытовая техника и офисное оборудование.
Как недорогая вспомогательная шина, шина LIN широко используется в автомобильной электронике.Шина LIN используется в низкоскоростных приложениях, таких как двери, окна, освещение и центральные замки. Фактически, CAN было бы проще реализовать эти функции в транспортных средствах на новой энергии, но она ограничена слишком большим количеством аксессуаров в автомобиле. При изготовлении она должна быть совместима с поставщиками различных аксессуаров, включая низкоскоростную поставку аксессуаров. использование LIN из соображений стоимости. Сейчас LIN все еще широко используется, надо учиться.
Особенности LIN
- Последовательная связь
- Однопроводная передача, напряжение на шине 12В
- Помехи между линиями относительно небольшие, что экономит ресурсы линии и имеет большое расстояние передачи (не более 40 метров).
- Отвечает требованиям большинства низкоскоростных автомобилей
- Никаких конфликтов, никакого арбитража
- Почти все микроконтроллеры имеют аппаратную основу шины LIN.
- По сравнению с CAN, стоимость может быть значительно снижена
- Используйте поле синхронизации в заголовке, чтобы добиться синхронизации без линий часов, что значительно снижает затраты
- Передача детерминированная, и время распространения можно рассчитать заранее.
- В целях повышения EMC протокол LIN ограничивает максимальную скорость передачи до 20 Кбит / с.
Разница между LIN и CAN
Однопроводная передача, низкая скорость передачи
Шина LIN физически представляет собой шину с открытым стоком с подтягивающим коллектором 12 В, и несколько узлов могут быть подключены параллельно к главному узлу. Он аналогичен линии SDA IIC, но не требует линии синхронизации SCL.LIN использует скорость передачи данных, согласованную между хостом и подчиненным устройством, аналогично UART. В отличие от последовательного порта, он синхронизируется через поле синхронизации, и передача более надежна. По сравнению со структурой CAN с витой парой, помехоустойчивость линии LIN относительно мала.Чтобы улучшить характеристики EMC, скорость связи ограничена до 20 Кбит / с.
Читайте также: Зимние шины кумхо для внедорожников
Структура одного ведущего и нескольких ведомых
Структура шины LIN представляет собой звездообразную модель структуры главный-подчиненный, и все подчиненные устройства подключены к хосту. Передача может быть инициирована только мастером, а подчиненное устройство не может активно инициировать запрос. Ведомое устройство может рассматриваться как издатель сообщения, а ведущее устройство — как подписчик сообщения. Чтобы получить сообщение (значение переменной), ведущее устройство должно постоянно читать соответствующее сообщение. Эта структура определяет, что шина LIN может передавать только небольшое количество сообщений, чтобы гарантировать характер обновлений сообщений в реальном времени.
Облегченный стек протоколов обработки
В стеке протокола передачи CAN-шины он занимает значительный объем кода, включая уровень драйвера CAN, TP, UDS и т.д .; LIN не должен быть таким сложным, только простые драйверы, таблицы планирования, пробуждение в спящем режиме и т.д. Таким образом, объем кода меньше на порядок, но в службе LIN верхнего уровня его все еще необходимо преобразовать в сигнал CAN для передачи, поэтому, наконец, LIN все равно должен вернуться к сигналу CAN.
Топология сети

Шина LIN представляет собой звездообразную структуру с одним ведущим и несколькими ведомыми устройствами.Шина LIN обычно не существует одна, и узел часто подключен к сети верхнего уровня (например, CAN).
Узел не обязательно соответствует ЭБУ, поскольку ЭБУ может предоставлять несколько интерфейсов LIN.
Протокол LIN
Правила передачи
Рама в основном содержитЗаголовок кадрас участиемответДве части
- Задача хоста отвечает за отправку заголовка кадра
- Подчиненная задача анализирует заголовок кадра после его получения, а затем решает, отправлять ли ответ, получать ответ или не отвечать.
Общая конструкция каркаса
Заголовок кадра включаетИнтервал синхронизации、Синхронизировать сегментс участиемЗащищенный сегмент идентификатора (PID), Отправлено хост-узлом
Ответ включаетСегмент данныхс участиемСегмент контрольной суммы, Отправлено подчиненным узлом
0 Доминирующий уровень, 1 Рецессивный уровень
Интервал синхронизации
Интервал синхронизации состоит изИнтервал синхронизациис участиемИнтервал синхронизациисочинение
- Интервал синхронизации указывает на начало кадра
- Сегмент интервала синхронизации имеет не менее 13 доминирующих битов, а разделитель имеет хотя бы один невидимый бит.
- Сегмент интервала синхронизации не соответствует формату байтового поля, остальные сегменты следуют
- Он считается интервальным сигналом, когда по крайней мере 11 доминирующих битов постоянно отслеживаются из узла.
Синхронизировать сегмент
Байт-поле: стандартный формат передачи данных UART
Поле байта включает 1 стартовый бит (доминантный) + 8 бит данных + 1 стоповый бит (рецессивный).
- Для передачи данных LSB отправляется первым, а MSB — последним.
- Здесь, чтобы гарантировать, что все подчиненные узлы имеют ту же скорость передачи, что и главный узел, для отправки и получения данных
- Сегмент синхронизации фиксируется равным одному байту, а значение фиксируется равным 0x55.
Защищенный сегмент идентификатора (PID)
Защищенный сегмент идентификатора состоит из6-битный идентификатор кадрас участием2 бита четностисочинение
Читайте также: Григорьян айгуш виликовна ип шины
PID — это не адрес подчиненного узла, а идентификатор сообщения, на которое вы хотите подписаться. Подчиненный узел может предоставлять услуги с несколькими идентификаторами сообщений.Например, ЭБУ управления освещением автомобиля может предоставлять несколько услуг идентификаторов LIN, таких как управление освещением, состояние и код неисправности. Адрес ведомого узла является неявным. Идентификатор сообщения соответствующие отношения.
Диапазон идентификаторов кадров: 0x00
Здесь, поскольку данные отправляются первыми, отправляется LSB, поэтому первым отправляется P1 бита четности. При отправке бит над идентификатором кадра занят 2 битами четности, поэтому идентификатор эквивалентен младшим 6 битам весь кадр вместо старших 6 бит
Формула проверки выглядит следующим образом, где «represents» представляет операцию «исключающее ИЛИ», а «¬» представляет операцию «отрицание».
Из формулы видно, что PID не будет иметь все 0 или все 1. Следовательно, если подчиненный узел получает «0xFF» или «0x00», это может быть расценено как ошибка передачи.
Тип кадра
Сегмент данных
Данные, отправляемые узлом, находятся в сегменте данных, старшие 8 байтов, младшие DATA1 отправляются первыми, а отправка увеличивается последовательно.
Кадр данных LIN может передавать до 8 байтов. Согласно LUN 2.x, количество байтов, которое может передать LIN, может составлять 2, 4, 8 вместо любого числа в пределах 1-8. Вообще говоря, в автомобиле выбирается одинаковое количество байтов, чаще всего используется 8 байтов на кадр.
Сегмент данных содержит два типа данных,сигналилиДиагностическое сообщение
Когда тип идентификатора кадра представляет собой кадр, несущий сигнал, сегмент данных хранит сигнал, а идентификатор кадра соответствует одному или нескольким сигналам.
Если тип идентификатора кадра является диагностическим, в сегменте данных хранятся диагностические сообщения.
Сегмент контрольной суммы
Раздел контрольной суммы предназначен для проверки содержимого, передаваемого во фрейме.
Контрольная сумма делится наСтандартная контрольная суммас участиемРасширенная контрольная сумма
- Стандартная контрольная сумма: используется в диагностических кадрах
- Расширенная контрольная сумма: кадры, отличные от диагностических.
- Байт
Независимо от того, используется ли стандартная контрольная сумма или расширенная контрольная сумма, управляет хост-узел, а публикующий узел и каждый слушающий узел определяют, какую контрольную сумму использовать в соответствии с идентификатором кадра.
Метод проверки состоит в том, чтобы добавить каждый байт объекта проверки с помощью двоичного сложения (если результат больше или равен 256, вычесть 255), побитно инвертировать окончательную сумму и использовать результат в качестве контрольной суммы отправки. В соответствии с типом контрольной суммы получатель выполняет то же двоичное сложение с переносом полученных данных, и окончательная сумма не инвертируется, и добавляет сумму к полученной контрольной сумме. Если результат равен 0xFF, то контрольная сумма Нет ошибок, это в определенной степени гарантирует правильность передачи данных.
пример
Используя стандартную контрольную сумму, Data1 = 0x4A, Data2 = 0x55, Data3 = 0x93, Data4 = 0xE5, метод расчета показан в таблице 3.3:
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле









