
Сегодня мы начинаем знакомство с шиной SPI (Serial Peripheral Interface).
Данная шина очень широко используется в электронике. Она очень удобна, являясь синхронной и полнодуплексной, поэтому, применяется во многих схемах для общения между различными цифровыми усторйствами – датчиками, контроллерами, драйверами и прочими устройствами.
Ещё одним важнейшим фактором необходимости нашего с ней знакомства является то, что данная шина аппаратно организована в контроллерах AVR.
Мало того, хотим мы этого или не хотим, с интерфейсом SPI мы с вами общаемся уже давным давно, как только начали первый раз прошивать наш контроллер, так как прошивается он именно посредством данного интерфейса.
Поэтому хочется познакомиться с данной шиной поближе.
Давайте откроем техническую документацию на контроллер Atmega8, откроем страницу, где изображена распиновка данного контроллера и посмотрим, что от 16 до 19 ножки и находятся выводы шины SPI
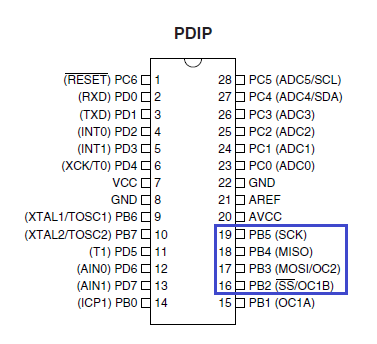
Теперь немного подробнее о данных выводах
SS (chip select) – это ножка выбора устройства. Если на ведомом устройстве на данной ножке установится низкий уровень, то данное устройство будет откликаться и обмениваться информацией по шине SPI, если высокий, то не будет.
MOSI (master output slave input) – это ножка выхода ведущего устройства и входа ведомого устройства.
MISO (master input slave output) – наоборот, выход ведомого, вход ведущего.
SCK – ножка синхронизации. Ко всем устройствам, участвующим в обмене информации по данной шине, подаются синхроимпульсы с определённой частотой.
Вот схема реализации шины SPI в контроллере Atmega8
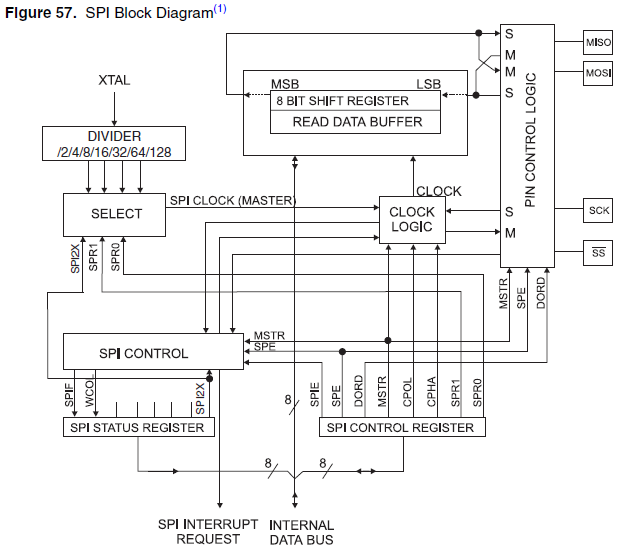
Как в любой шине, здесь имеется ряд регистров, в которых хранится определённая информация.
Нам интересен SHIFT REGISTER, через него и происходит обмен информации. Как только на ножке синхронизации будет определённый фронт, или нисходящий или восходящий, в зависимости от настройки, данные регистры у ведомого и ведущего устройства обменяются информацией, причем не всей информацией, а только одним битом. Данные регистры сдвинутся влево и старшие биты из каждого регистра уйдут в младшие биты такого же регистра сопряженного устройства. То есть ведомый передаст свой старший бит через ножку MOSI ведущему, который его запишет в освободившийся засчет сдвига влево младший бит, а ведомый свой вытесненный засчет сдвига передаст старший бит через ножку MISO в младший бит ведущего. Вот так и идёт обмен, то есть за 8 полных циклов тактирования они полностью обменяются байтами
Как только все 8 бит одного байта информации передадутся, определённый регистр нам просигнализирует о том, что данный процесс закончен. Вернее, определённый бит определённого регистра.
Также в блок-схеме мы видим делитель, на вход которого поступают тактовые импульсы и уже потом разделённые на определенное значение поступают по цепочке на ножку SCK и уже оттуда подаются на ведомое устройство на одноимённую ножку. Этим и обеспечивается синхронность работы устройств. Частота тактовых импульсов выбирается из наименьшей поддерживаемой всеми устройствами, участвующими в обмене.
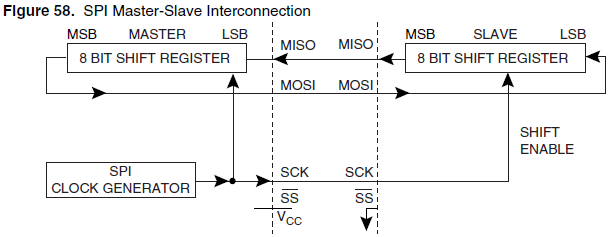
Я говорю во множественном числе, так как может быть не только два устройства в данной цепи. Как это обеспечивается при условии, что у устройств нет никаких адресов, я сейчас и расскажу.
Существует несколько способов обена информацией между несколькими устройствами, то есть когда на одно ведущее устройство приходится несколько ведомых. Мы рассмотрим два самых распространённых из них.
Первый способ – радиальный (нажмите на картинку для увеличения изображения)
Здесь мастер направляет данные к определённому устройству, включая на ножке SS логический 0. При данном способе возможно выбрать только одно устройство, также потребуются несколько свободных ножек портов контроллера.
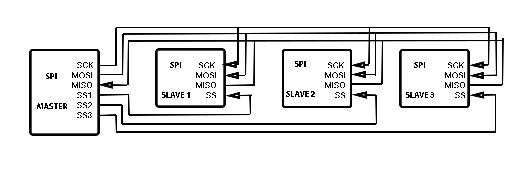
Есть ещё один интересный способ – кольцевой или каскадный (нажмите на картинку для увеличения изображения)
Читайте также: Хорошая 155 шина зимняя
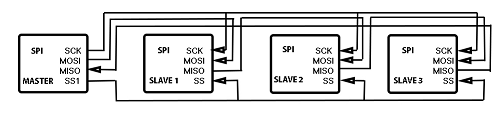
Здесь мы видим, что ножки выбора все запараллелены и обмен идёт по кругу. Тем самым скорость падает, засчёт того, что увеличивается круг передачи, но зато экономятся лапки портов.
Всё это мы в очередных занятиях изучим подробнее, когда будем использовать определённые устройства в наших проектах.
Ну, вроде со схемотехникой передачи данных по шине SPI мы разобрались.
Теперь разберёмся, как же данным процессом управлять на уровне аппаратных регистров контроллера AVR.
Данные регистры мы видим в блок-схеме выше на странице.
У Atmega8 существуют следующие регистры для обслуживания шины SPI.
SPDR (SPI Data Register) – регистр данных, в блок-схеме это DATA BUFFER. В этот регистр мы будем заносить байт для последующей его передачи на ведомое устройство и из него же будем читать байт информации, пришедший с ведомого устройства. Также не обязательно что у нас контроллер будет ведущим устройством. Впоследствии мы соберём схему из двух контроллеров, один из которых будет ведомым. Так что именно в этом регистре будет находиться байт и для отправки и для приёма.
SPCR (SPI Control Register) – управляющий регистр

Данный регистр включает в себя следующие биты:
SPIE (SPI Interrupt Enable) – бит, который разрешает прерывания.
SPE (SPI Enable) – бит, включающий шину SPI.
DORD (Data Order) – бит, устанавливающий порядок отправки бит, Если он установлен в 1, то первым отправляется младший бит, если в 0 – старший.
MSTR (Master/Slave Select) – бит, который назначает устройство ведущим либо ведомым. При установке данного бита 1 устройство будет ведущим.
CPOL (Clock Polarity) – полярность синхронизации, определяет, при каком фронте синхронизирующего импульса будет инициироваться режим ожидания

Если данный бит в 1, то режим ожидания будет у нас при восходящем фронте, а если в 0, то при нисходящем.
CPHA (Clock Phase) – бит, отвечающий за фазу тактирования, то есть по какому именно фронту будет осуществляться передача бита.

Посмотрим диаграммы передачи данных в зависимости от установки CPOL и CPHA
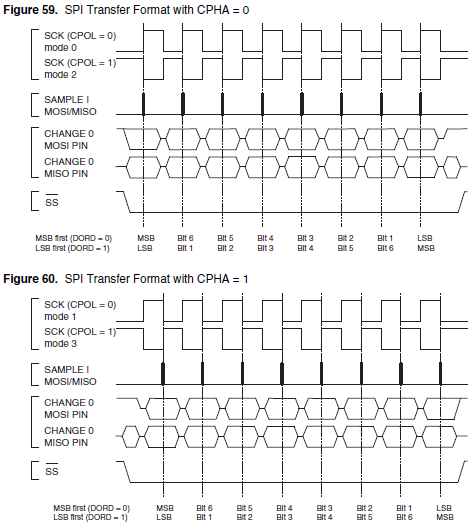
Вот такая вот интересная зависимость. Порой мы иногда видим в технических характеристиках какого нибудь устройства, что оно, к примеру, может работать в режиме SPI 0:0 и SPI 1:1, вот это как раз и касается настройки этих битов.
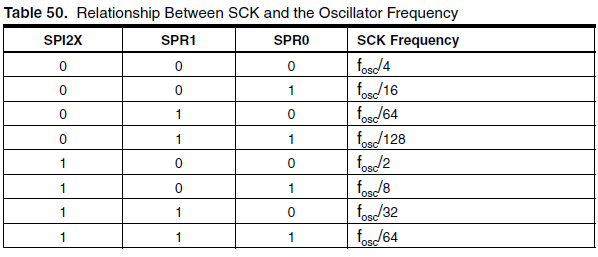
SPR1, SPR0 (SPI Clock Rate Select) – это биты, отвечающие за значение делителя частоты синхронизации, работают совместно с битом SPI2X, находящемся в регистре статуса. Он также управляющий, так как восьми бит в управляющем регистре под все настройки не хватило, а в статусном много свободных.
SPSR (SPI Status Register) – статусный регистр

SPI2X (Double SPI Speed Bit) – бит, удваивающий скорость, работающий совместно с битами SPR1 и SPR0 управляющего регистра.
Посмотрим зависимость частоты от данных трёх битов
SPIF (SPI Interrupt Flag) – Флаг прерывания. Установку данного бита в единицу мы ждём. когда принимаем байт. Как только байт от другого устройства появится полностью у нас в буфере, то данный флаг установится. Данный флаг работает только в случае установки бита, разрешающего прерывания, а также разрешения глобальных прерываний.
WCOL (Write COLlision Flag) – флаг конфликта, или коллизий, установится в том случае, если во время передачи данных будет конфликт битов, если во время передачи данных выполнится попытка записи в регистр данных.
Ну теперь мы, можно сказать, немного познакомились с интерфейсом SPI.
В следующем занятии мы уже попытаемся данную шину использовать на практике, подключив к нашему контроллеру какое-нибдуь ведомое устройство.
Купить программатор можно здесь (продавец надёжный) USBASP USBISP 2.0
Смотреть ВИДЕОУРОК (нажмите на картинку)
- Русские Блоги
- Разница между SPI, I2C и UART тремя протоколами последовательной шины
- Концепция шины I2C (Inter-Integrated Circuit):
- Введение в интерфейс SPI
- Разница между SPI, I2C и UART тремя протоколами последовательной шины:
- Первый, разница, конечно же, в названии:
- Во-вторых, разница заключается в линии электрического сигнала:
- В-третьих, из второго пункта очевидно, что SPI и UART могут обеспечить полный дуплекс, а I2C — нет;
- В-четвертых, посмотрите на мнение быдла!
Русские Блоги
Разница между SPI, I2C и UART тремя протоколами последовательной шины
Концепция шины I2C (Inter-Integrated Circuit):
Связь I2C Нужно всего 2 двунаправленных шины —— Одна линия данных SDA (последовательные данные: линия последовательных данных), одна линия синхронизации SCL (последовательные часы: линия последовательных часов). Линия SDA используется для передачи данных, а линия SCL используется для синхронизации передачи и приема данных. Данные, передаваемые по линии SDA, представляют собой прямую передачу (старший байт байта передается первым), и каждая передача составляет 8 бит, то есть 1 байт. Поддержка мульти-мастеринга в любой момент времени Мастер может быть только один . Каждое устройство, подключенное к шине, имеет один Независимый адресный адрес , Всего 7 бит, хост использует этот адрес для доступа к устройству. Шины SDA и SCL необходимо соединить подтягивающими резисторами.Когда шина свободна, обе линии имеют высокий уровень. Любое устройство, подключенное к шине, будет понижать уровень сигнала шины, когда оно выдает низкий уровень, то есть SDA и SCL каждого устройства находятся в линейной связи. Когда несколько хостов используют шину одновременно, необходим арбитраж, чтобы определить, какое устройство занимает шину, в противном случае данные будут конфликтовать.
Читайте также: Пистолет для подкачки шин с манометром электрофоретическое покрытие arnezi r7500003

Универсальный асинхронный приемник / передатчик, обычно называемый UART, представляет собой асинхронный приемник / передатчик, который является частью компьютерного оборудования. Он будет передавать данные вПоследовательная связьпротивПараллельное общениеЧтобы преобразовать между. Как микросхема, преобразующая параллельные входные сигналы в последовательные выходные сигналы, UART обычно интегрируется в соединение с другими интерфейсами связи.
Последовательный порт во встроенной системе обычно относится к порту UART, но мы часто не знаем разницы между ним и COM-портом, а также отношения между RS232, TTL и т. Д. Фактически, UART, COM относятся к форме физического интерфейса (аппаратного), а TTL, RS-232 относится к стандарту уровня (электрический сигнал).
UART имеет 4 контакта (VCC, GND, RX, TX), используя уровень TTL, низкий уровень — 0 (0 В), высокий уровень — 1 (3,3 В или выше).

Особенности UART: Как правило, контроллеры uart создаются вместе с процессорами во встроенных системах.Как и микросхема Freescale IMX6, существует несколько контроллеров uart.
Введение в интерфейс SPI
В последние несколько дней я наткнулся на флэш-память, использующую интерфейс SPI, и знаю, что флэш-память также может быть последовательной. Кажется, что это действительно была лягушка на дне колодца. Я нашел некоторую информацию об интерфейсе SPI. Позже я нашел информацию на английском языке, перевел ее и добавил Мое личное понимание было собрано в статью, надеюсь, она будет полезна новичкам.
Полное название интерфейса SPI — «Serial Peripheral Interface», что означает последовательный периферийный интерфейс. Впервые он был определен компанией Motorola для процессоров серии MC68HCXX. Интерфейс SPI в основном используется между EEPROM, FLASH, часами реального времени, аналого-цифровым преобразователем, процессором цифрового сигнала и декодером цифрового сигнала.
Интерфейс SPI — это синхронная последовательная передача данных между ЦП и периферийными низкоскоростными устройствами. Под импульсом сдвига ведущего устройства данные передаются в битах, старший бит находится спереди, а положение — сзади. Это полнодуплексная связь, и скорость передачи данных общая. Он быстрее шины I2C, а скорость может достигать нескольких Мбит / с.
Интерфейс SPI работает в режиме ведущий-ведомый. В этом режиме обычно есть ведущее устройство и одно или несколько ведомых устройств. Интерфейс включает следующие четыре сигнала:
(1) Вывод данных MOSI-ведущего устройства, ввод данных ведомого устройства
(2) Ввод данных MISO-ведущего устройства, вывод данных ведомого устройства
(3) Сигнал SCLK-clock, генерируемый ведущим устройством.
(4) / SS — сигнал включения ведомого устройства, управляемый ведущим устройством
В двухточечной связи интерфейс SPI не требует операций адресации и является полнодуплексным, что является простым и эффективным.
В системе с несколькими подчиненными устройствами каждое подчиненное устройство нуждается в независимом разрешающем сигнале, который немного сложнее аппаратно, чем система I2C.
Читайте также: Размер шин volkswagen tiguan 2020
Интерфейс SPI на самом деле представляет собой два простых регистра сдвига во внутреннем оборудовании.Передаваемые данные составляют 8 бит.Под сигналом включения ведомого и импульсом сдвига, генерируемым ведущим устройством, он передается бит за битом, причем старший бит находится спереди, а младший бит — сзади. . Как показано на рисунке ниже, данные изменяются по заднему фронту SCLK, и в то же время в регистре сдвига сохраняется один бит данных.
Схема внутреннего оборудования интерфейса SPI:
Наконец, один недостаток интерфейса SPI: нет назначенного управления потоком и нет механизма ответа, подтверждающего, получены ли данные.
Разница между SPI, I2C и UART тремя протоколами последовательной шины:
Первый, разница, конечно же, в названии:
SPI (последовательный периферийный интерфейс: последовательный периферийный интерфейс);
UART (универсальный асинхронный приемный передатчик: универсальный асинхронный приемный передатчик)
Во-вторых, разница заключается в линии электрического сигнала:
Шина SPI состоит из трех сигнальных линий Состав: последовательные часы (SCLK), последовательный вывод данных (SDO), последовательный ввод данных (SDI). Шина SPI может соединять несколько устройств SPI друг с другом. Устройство SPI, которое обеспечивает последовательные часы SPI, является ведущим или ведущим SPI, а другие устройства являются ведомыми или ведомыми (ведомыми) SPI. Полнодуплексная связь может быть реализована между ведущими и ведомыми устройствами.При наличии нескольких ведомых устройств может быть добавлена строка выбора ведомого устройства.
Если вы используете универсальный порт ввода-вывода для имитации шины SPI, у вас должен быть выходной порт (SDO), входной порт (SDI), а другой порт зависит от типа реализованного устройства.Если вы хотите реализовать устройство ведущее-ведомое, вам понадобится порт ввода и вывода. , Если реализовано только ведущее устройство, порта вывода достаточно; если реализовано только ведомое устройство, требуется только порт ввода.
Шина I2C — это стандарт двустороннего, двухпроводного (SCL, SDA), последовательного интерфейса и интерфейса с несколькими ведущими устройствами.Он имеет механизм арбитража шины и очень подходит для передачи данных между устройствами на короткие расстояния и нечасто. В его системе протокола адрес устройства-получателя всегда переносится при передаче данных, поэтому может быть реализована сеть устройств.
Если порт ввода-вывода общего назначения используется для имитации шины I2C и достижения двунаправленной передачи, требуется порт ввода-вывода (SDA), а также порт вывода (SCL). (Примечание: данные I2C относительно плохо изучены, описание здесь может быть очень неполным)
Шина UART — это асинхронный последовательный порт Следовательно, он, как правило, намного сложнее, чем структура первых двух синхронных последовательных портов. Он обычно состоит из генератора скорости передачи (генерируемая скорость передачи в 16 раз больше скорости передачи), приемника UART и передатчика UART. На оборудовании есть два провода: один для отправки, а другой для приема.
Очевидно, что если универсальный порт ввода-вывода используется для моделирования шины UART, требуются один входной порт и один выходной порт.
В-третьих, из второго пункта очевидно, что SPI и UART могут обеспечить полный дуплекс, а I2C — нет;
В-четвертых, посмотрите на мнение быдла!
Wudanyu: Количество линий I2C меньше. Я думаю, что он более мощный, чем UART и SPI, но технически более проблематичный, потому что I2C требует поддержки двунаправленного ввода-вывода и Используйте подтягивающий резистор , Я думаю, что способность к помехам слабая, обычно используется для связи между чипами на одной плате и меньше используется для междугородной связи. Реализация SPI проще. UART требует фиксированной скорости передачи данных, что означает, что интервал между двумя битами данных должен быть одинаковым. SPI не имеет значения, потому что это синхронизированный протокол.
Quickmouse: скорость I2C немного ниже, чем у SPI, и протокол немного сложнее, чем SPI, но соединение меньше, чем у стандартного SPI.
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле