Главное отличие между синхронным двигателем с постоянными магнитами (СДПМ) и асинхронным электродвигателем заключается в роторе. Проведенные исследования 1 показывают, что СДПМ имеет КПД примерно на 2% больше, чем высоко эффективный (IE3) асинхронный электродвигатель, при условии, что статор имеет одинаковую конструкцию, а для управления используется один и тот же частотный преобразователь. При этом синхронные электродвигатели с постоянными магнитами по сравнению с другими электродвигателями обладают лучшими показателями: мощность/объем, момент/инерция и др.
- Конструкции и типы синхронного электродвигателя с постоянными магнитами
- Принцип работы синхронного двигателя
- Управление синхронным двигателем с постоянными магнитами
- Трапециидальное управление
- Полеориентированное управление
- Полеориентированное управление СДПМ по датчику положения
- Полеориентированное управление СДПМ без датчика положения
- Двигатель постоянного тока асинхронный или синхронный. Типы электродвигателей и принципы работы
- Классификация электродвигателей
- История.
- Ссылки
- Смотреть что такое «Электродвигатель переменного тока» в других словарях:
- Синхронные и асинхронные электродвигатели
- Коллекторные машины
- Униполярные и шаговые варианты
- Какие электродвигатели входят в группу «электродвигатели постоянного тока»
- Что собой представляет коллекторный электродвигатель
- Преимущества и недостатки бесколлекторных электродвигателей
- Как работает синхронный электродвигатель
- Строение синхронного электродвигателя
- Свойства
- Однофазный электродвигатель: устройство и принцип работы
- 🌟 Видео
Видео:Асинхронные и Синхронные двигатели и генераторы. Мощный #энерголикбез ПЕРСПЕКТИВЫ ЭЛЕКТРОДВИГАТЕЛЕЙСкачать

Конструкции и типы синхронного электродвигателя с постоянными магнитами
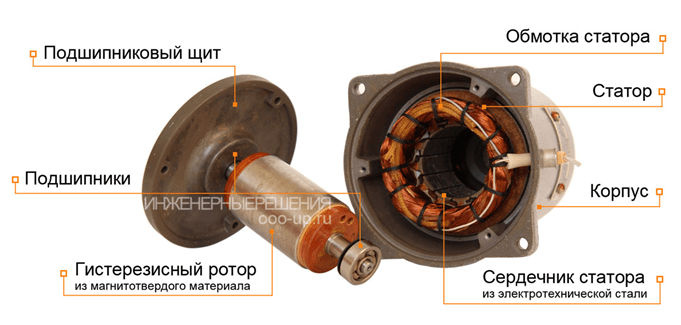
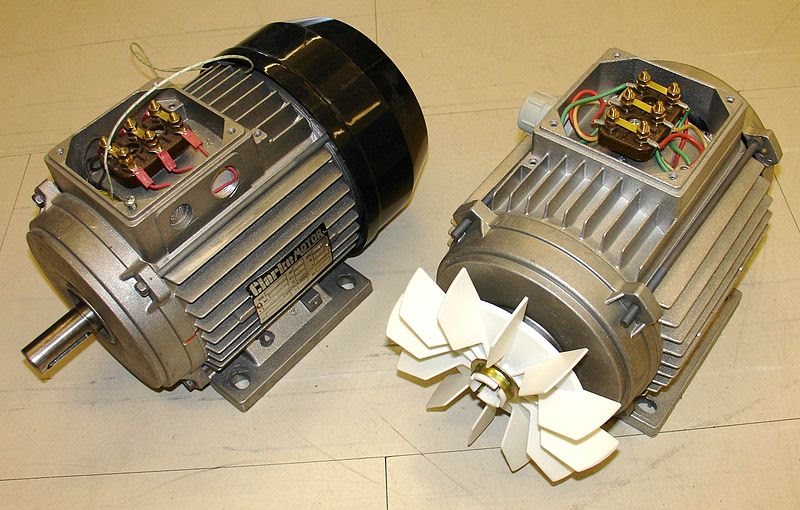
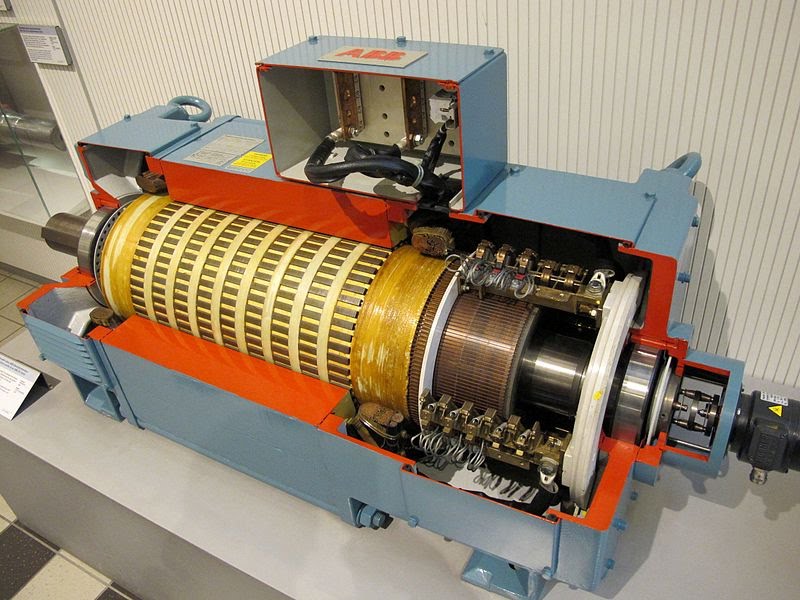
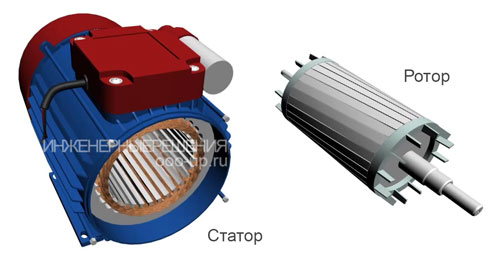
Синхронный электродвигатель с постоянными магнитами, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.

Обычно ротор располагается внутри статора электродвигателя, также существуют конструкции с внешним ротором — электродвигатели обращенного типа.

Ротор состоит из постоянных магнитов. В качестве постоянных магнитов используются материалы с высокой коэрцитивной силой.
Электродвигатель с неявно выраженными полюсами имеет равную индуктивность по продольной и поперечной осям Ld = Lq, тогда как у электродвигателя с явно выраженными полюсами поперечная индуктивность не равна продольной Lq ≠ Ld.



Статор состоит из корпуса и сердечника с обмоткой. Наиболее распространены конструкции с двух- и трехфазной обмоткой.
- В зависимости от конструкции статора синхронный двигатель с постоянными магнитами бывает:
- с распределенной обмоткой;
- с сосредоточенной обмоткой.


Распределенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 2, 3. k.
Сосредоточенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 1. При этом пазы расположены равномерно по окружности статора. Две катушки, образующие обмотку, можно соединить как последовательно, так и параллельно. Основной недостаток таких обмоток — невозможность влияния на форму кривой ЭДС [2].


Форма кривой ЭДС в проводнике определяется кривой распределения магнитной индукции в зазоре по окружности статора.
Известно, что магнитная индукция в зазоре под явно выраженным полюсом ротора имеет трапециидальную форму. Такую же форму имеет и наводимая в проводнике ЭДС. Если необходимо создать синусоидальную ЭДС, то полюсным наконечникам придают такую форму, при которой кривая распределения индукции была бы близка к синусоидальной. Этому способствуют скосы полюсных наконечников ротора [2].
Видео:Как работают ЭЛЕКТРОДВИГАТЕЛИ переменного тока? АСИНХРОННЫЙ и СИНХРОННЫЙ. Понятное объяснение!Скачать

Принцип работы синхронного двигателя
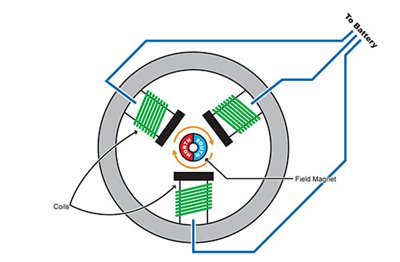
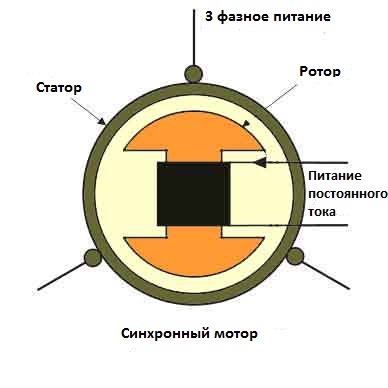
Принцип действия синхронного электродвигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора. Концепция вращающегося магнитного поля статора синхронного электродвигателя такая же, как и у трехфазного асинхронного электродвигателя.
Принцип работы синхронного двигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора.

Магнитное поле ротора, взаимодействуя с синхронным переменным током обмоток статора, согласно закону Ампера, создает крутящий момент, заставляя ротор вращаться (подробнее).
Постоянные магниты, расположенные на роторе СДПМ, создают постоянное магнитное поле. При синхронной скорости вращения ротора с полем статора, полюса ротора сцепляются с вращающимся магнитным полем статора. В связи с этим СДПМ не может сам запуститься при подключении его напрямую к сети трехфазного тока (частота тока в сети 50Гц).
Видео:Синхронный и асинхронный двигатели. Отличия двигателейСкачать

Управление синхронным двигателем с постоянными магнитами
Для работы синхронного двигателя с постоянными магнитами обязательно требуется система управления, например, частотный преобразователь или сервопривод. При этом существует большое количество способов управления реализуемых системами контроля. Выбор оптимального способа управления, главным образом, зависит от задачи, которая ставится перед электроприводом. Основные методы управления синхронным электродвигателем с постоянными магнитами приведены в таблице ниже.
| Управление | Преимущества | Недостатки | |||
|---|---|---|---|---|---|
| Синусоидальное | Скалярное | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| Векторное | Полеориентированное управление | С датчиком положения | Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования | Требуется датчик положения ротора и мощный микроконтроллер системы управления | |
| Без датчика положения | Не требуется датчик положения ротора. Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования, но меньше, чем с датчиком положения | Бездатчиковое полеориентированное управление во всем диапазоне скоростей возможно только для СДПМ с ротором с явно выраженными полюсами, требуется мощная система управления | |||
| Прямое управление моментом | Простая схема управления, хорошие динамические характеристики, большой диапазон регулирования, не требуется датчик положения ротора | Высокие пульсации момента и тока | |||
| Трапециидальное | Без обратной связи | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| С обратной связью | С датчиком положения (датчиками Холла) | Простая схема управления | Требуются датчики Холла. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | ||
| Без датчика | Требуется более мощная система управления | Не подходит для работы на низких оборотах. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | |||
Для решения несложных задач обычно используется трапециидальное управление по датчикам Холла (например — компьютерные вентиляторы). Для решения задач, которые требуют максимальных характеристик от электропривода, обычно выбирается полеориентированное управление.
Трапециидальное управление
Одним из простейших методов управления синхронным двигателем с постоянными магнитами является — трапецеидальное управление. Трапециидальное управление применяется для управления СДПМ с трапециидальной обратной ЭДС. При этом этот метод позволяет также управлять СДПМ с синусоидальной обратной ЭДС, но тогда средний момент электропривода будет ниже на 5%, а пульсации момента составят 14% от максимального значения. Существует трапециидальное управление без обратной связи и с обратной связью по положению ротора.
Управление без обратной связи не оптимально и может привести к выходу СДПМ из синхронизма, т.е. к потери управляемости.
- Управление с обратной связью можно разделить на:
- трапециидальное управление по датчику положения (обычно — по датчикам Холла);
- трапециидальное управление без датчика (бездатчиковое трапециидальное управление).
В качестве датчика положения ротора при трапециидальном управлении трехфазного СДПМ обычно используются три датчика Холла встроенные в электродвигатель, которые позволяют определить угол с точностью ±30 градусов. При таком управление вектор тока статора принимает только шесть положений на один электрический период, в результате чего на выходе имеются пульсации момента.

Полеориентированное управление
Полеориентированное управление позволяет плавно, точно и независимо управлять скоростью и моментом бесщеточного электродвигателя. Для работы алгоритма полеориентированного управления требуется знать положение ротора бесщеточного электродвигателя.
- Существует два способа определения положения ротора:
- по датчику положения;
- без датчика — посредством вычисления угла системой управления в реальном времени на основе имеющейся информации.
Полеориентированное управление СДПМ по датчику положения
- В качестве датчика угла используются следующие типы датчиков:
- индуктивные: синусно-косинусный вращающийся трансформатор (СКВТ), редуктосин, индуктосин и др.;
- оптические;
- магнитные: магниторезистивные датчики.

Полеориентированное управление СДПМ без датчика положения
Благодаря бурному развитию микропроцессоров с 1970-х годов начали разрабатываться бездатчиковые векторные методы управления бесщеточными электродвигателями переменного тока. Первые бездатчиковые методы определения угла были основаны на свойстве электродвигателя генерировать обратную ЭДС во время вращения. Обратная ЭДС двигателя содержит в себе информацию о положении ротора, поэтому вычислив величину обратной ЭДС в стационарной системе координат можно рассчитать положение ротора. Но, когда ротор не подвижен, обратная ЭДС отсутствует, а на низких оборотах обратная ЭДС имеет маленькую амплитуду, которую сложно отличить от шума, поэтому данный метод не подходит для определения положения ротора двигателя на низких оборотах.
- Существует два распространенных варианта запуска СДПМ:
- запуск скалярным методом — запуск по заранее определенной характеристики зависимости напряжения от частоты. Но скалярное управление сильно ограничивает возможности системы управления и параметры электропривода в целом;
- метод наложения высокочастотного сигнала – работает только с СДПМ у которого ротор имеет явно выраженные полюса.
Читайте также: Самый мощный серийный мотор

На текущий момент бездатчиковое полеориентированное управление СДПМ во всем диапазоне скоростей возможно только для двигателей с ротором с явно выраженными полюсами.
Видео:БЕСКОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ. Как работает? Чем отличаться от щёточного? #бесколлекторный #МОТОРСкачать

Двигатель постоянного тока асинхронный или синхронный. Типы электродвигателей и принципы работы
Электродвигатели разной мощности (750 Вт, 25 Вт, к CD-плееру, к игрушке, к дисководу)
Электрический двигатель — это, электрическая машина , в которой электрическая энергия преобразуется в механическую, побочным эффектом является выделение тепла.
Видео:Как работают бесколлекторные ЭЛЕКТРОДВИГАТЕЛИ? Вентильный двигатель. Понятное объяснение!Скачать

Классификация электродвигателей
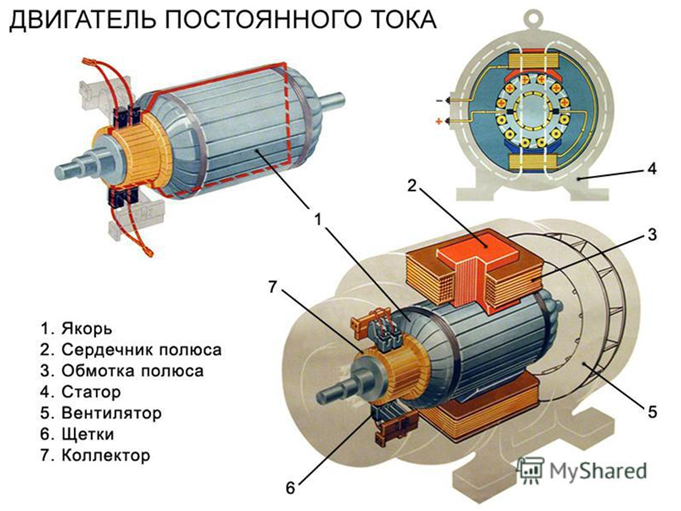
- Двигатель постоянного тока постоянным током ;
- Коллекторные двигатели постоянного тока. Разновидности:
- С возбуждением постоянными магнитами;
- С параллельным соединением обмоток возбуждения и якоря;
- С последовательным соединением обмоток возбуждения и якоря;
- Со смешанным соединением обмоток возбуждения и якоря;
- Двигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током , имеет две разновидности:
- Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения;
- Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением.
- Однофазные — запускаются вручную, или имеют пусковую обмотку, или имеют фазосдвигающую цепь
- Многофазные
- Шаговые двигатели — Электродвигатели, которые имеют конечное число положений ротора. Заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие.
- Вентильные двигатели — Электродвигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора (ДПР), системы управления (преобразователя координат) и силового полупроводникового преобразователя (инвертора).
- Универсальный коллекторный двигатель (УКД) — коллекторный электродвигатель, который может работать и на постоянном токе и на переменном токе.
Из-за связи с низкой частотой сети (50 Герц) асинхронные и синхронные двигатели имеют больший вес и размеры, чем коллекторный двигатель постоянного тока и универсальный коллекторный двигатель той же мощности. При применении выпрямителя и инвертора с частотой значительно большей 50 Гц вес и размеры асинхронных и синхронных двигателей приближаются к весу и размерам коллекторного двигателя постоянного тока и универсального коллекторного двигателя той же мощности.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока.
Видео:РЕАЛЬНО ЛИ запитать АСИНХРОННИК от 12 Вольт???Скачать

История.
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в пул ртути. Постоянный магнит был установлен в середине пула ртути. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется в школьных классах физики, вместо токсичной ртути используют рассол. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлова. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности.
Видео:Чем отличается асинхронный электро двигатель от синхронного, как устроен электро двигательСкачать
Ссылки
Wikimedia Foundation . 2010 .
Смотреть что такое «Электродвигатель переменного тока» в других словарях:
электродвигатель переменного тока — — [А.С.Гольдберг. Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом EN ас motor …
Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, ма … Википедия
Машина переменного тока, предназначенная для работы в режиме двигателя (см. Переменного тока машина). П. т. э. подразделяют на синхронные и асинхронные. Синхронные электродвигатели (См. Синхронный электродвигатель) применяют в… …
Электрическая машина, применяемая для получения переменного тока (генератор) или для преобразования электрической энергии в механическую (двигатель) либо в электрическую энергию другого напряжения или частоты (преобразователь) П. т. м.… … Большая советская энциклопедия
Машина перем. тока, предназнач. для работы в режиме двигателя. П. т. э. подразделяют на синхронные и асинхронные. Синхронные электродвигатели применяют в электроприводах в осн. тогда, когда требуется постоянство угловой скорости. Из асинхронных… … Большой энциклопедический политехнический словарь
электропривод переменного тока — электропривод постоянного [переменного] тока Электропривод, содержащий электродвигатель постоянного [переменного] тока. [ГОСТ Р 50369 92] Тематики электропривод EN ac drivealternating current drive DE Wechselstromantrieb … Справочник технического переводчика
электропривод постоянного (переменного) тока — 3.1.3 электропривод постоянного (переменного) тока: Привод, содержащий электродвигатель постоянного (переменного) тока и редуктор;
Явление электромагнитной индукции стало основой возникновения и развития всех электрических машин. Первооткрывателем этого явления в конце 19 века был Майкл Фарадей, английский учёный — экспериментатор. Он провёл опыты с первыми электрическими машинами. Сейчас без них невозможно представить нашу жизнь. Электродвигатели стали одними из самых распространённых электрических машин.
Для работы электромотора необходимо напряжение, свойства которого определяют его конструкцию. На переменном напряжении и токе работают такие электродвигатели:
Видео:Как трехфазный асинхронный двигатель работает на одной фазе? #энерголикбезСкачать
Синхронные и асинхронные электродвигатели
Синхронные и асинхронные электромоторы имеют общие условия для своей работы. Для этого необходимо магнитное поле, максимальная величина которого перемещается в пространстве. Такое поле может быть создано двумя или большим числом обмоток. Обычные конструкции синхронных и асинхронных электромоторов содержат две или три обмотки.
Они размещаются на массивных ферримагнитных сердечниках, усиливающих магнитное поле. Для трёх обмоток применяется трёхфазное напряжение, для двух обмоток – двухфазное или одна фаза с фазосдвигающим конденсатором. Но с таким конденсатором к однофазной сети можно подключить и трёхфазные двигатели.
Если ротор электромотора создаёт постоянное магнитное поле, либо от постоянных магнитов, либо от встроенного в ротор источника питания постоянного тока, либо от внешнего источника питания постоянного тока через кольца со щётками такой двигатель является синхронным. В нём частота оборотов и частота напряжения источника питания одинаковы. В асинхронных двигателях используется немагнитный ротор без явно выраженных полюсов, колец со щётками, встроенных выпрямителей и комбинированных деталей из различных материалов. Исключением является синхронный гистерезисный двигатель.

Ротор асинхронного двигателя работает как вторичная обмотка трансформатора, которая замкнута накоротко. Но ток в его роторе может возникнуть только при более медленном вращении в сравнении с магнитным полем статора. Такое различие скоростей называется скольжением. Простота конструкции и соответствующая надёжность делают асинхронный электромотор наиболее широко используемым.
Видео:Электродвигатель нового поколения, аксиальный, кпд бъёт все рекорды, electric motor.Скачать
Коллекторные машины
Однако у синхронных и асинхронных электромоторов есть один непреодолимый недостаток – частота питающего напряжения. Она определяет скорость вращения магнитного поля и вала в этих двигателях. Никакими конструктивными изменениями в них при заданной частоте питающего напряжения невозможно получить частоту вращения вала большую, чем частота питающего напряжения. При необходимости большего числа оборотов используются коллекторные электромоторы.
В этих двигателях происходит постоянное переключение обмоток ротора коллектором. Каждая обмотка по сути это рамка с током, которая, как известно из опытов Фарадея, поворачивается в магнитном поле. Но одна рамка повернётся и остановится. Поэтому рамок — обмоток сделано несколько и каждой из них соответствует пара пластин в коллекторе. Ток подаётся через щётки, скользящие по коллектору.
Конструкция такого электромотора позволяет работать от источника либо постоянного, либо переменного напряжения, который обеспечивает ток и в статоре и в роторе. При переменном напряжении направление тока в статоре и роторе изменяется одновременно и поэтому направление действия силы вращающей ротор сохраняется. Частота питающего напряжения никак не влияет на частоту вращения ротора. Она зависит только от величины напряжения, питающего электромотор. Скользящий контакт щётки с коллектором ограничивает возможности этих электродвигателей по сроку службы и месту применения, поскольку искрение в щётках довольно быстро разрушает скользящий контакт и недопустимо в условиях повышенной взрывоопасности.
Читайте также: Почему перегревается мотор холодильник
Видео:КАКОЙ ЭЛЕКТРОМОТОР ЛУЧШЕ, ЩЁТОЧНЫЙ ИЛИ БЕЗЩЁТОЧНЫЙ, КОЛЛЕКТОРНЫЙ ИЛИ БЕСКОЛЛЕКТОРНЫЙСкачать
Униполярные и шаговые варианты
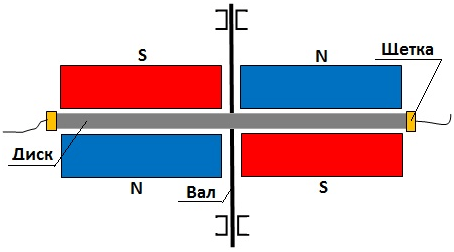
Однако есть такие конструкции электромоторов постоянного тока, в которых коллектора нет. Это униполярные электромоторы.
В этих электродвигателях ротор выполнен в виде диска, расположенного между полюсами постоянных магнитов. Щётки расположенные диаметрально противоположно питают током диск – ротор. Под воздействием силы Лоренца диск вращается. Несмотря на привлекательную простоту конструкции, такой электромотор не имеет широкого практического использования, поскольку требует слишком больших значений тока и магнитного поля. Тем не менее, существуют уникальные лабораторные разработки униполярных электромоторов со щётками из жидкого металла, которые развивают обороты немыслимые для иных конструкций двигателей.
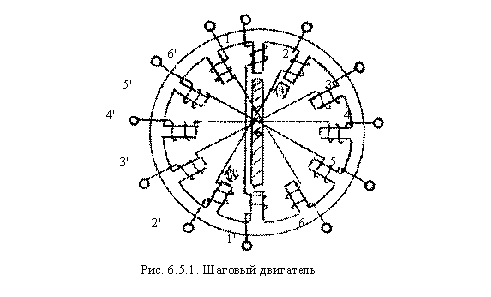
Шаговый двигатель это ещё одна конструкция, работающая на постоянном токе.
В целом этот двигатель подобен синхронному электромотору с ротором из постоянных магнитов. Отличие в том, что число обмоток здесь больше, и они управляются ключами, которые подают на каждую обмотку питающее напряжение. В результате ротор меняет своё положение, притягиваясь к подключенной обмотке. Число обмоток определяет минимальный угол поворота ротора, а коммутаторы – скорость вращения ротора. В шаговом двигателе ротор может вращаться почти как угодно, поскольку ключи связаны с электронной схемой управления.
Рассмотренные конструкции электромоторов являются базовыми. На их основе для решения определённых задач создано много специальных разновидностей электромоторов. Но это уже совсем другая история…
В быту, коммунальном хозяйстве, на любом производстве двигатели электрические являются неотъемлемой составляющей: насосы, кондиционеры, вентиляторы и пр. Поэтому важно знать типы наиболее часто встречающихся электродвигателей.
Электродвигатель является машиной, которая преобразует в механическую энергию электрическую. При этом выделяется тепло, являющееся побочным эффектом.
Видео: Классфикация электродвигателей
Все электродвигатели разделить можно на две большие группы:
- Электродвигатели постоянного тока
- Электродвигатели переменного тока.
Электродвигатели, питание которых осуществляется переменным током, называются двигателями переменного тока, которые имеют две разновидности:
- Синхронные – это те, у которых ротор и магнитное поле питающего напряжения вращаются синхронно.
- Асинхронные . У них отличается частота вращения ротора от частоты, создаваемого питающим напряжением магнитного поля. Бывают они многофазными, а также одно-, двух- и трехфазными.
- Электродвигатели шаговые отличаются тем, что имеют конечное число положений ротора. Фиксирование заданного положения ротора происходит за счет подачи питания на определенную обмотку. Путем снятия напряжения с одной обмотки и передачи его на другую осуществляется переход в другое положение.
К электродвигателям постоянного тока относят те, которые питаются постоянным током. Они, в зависимости от того, имею или нет щёточно-коллекторный узел, подразделяются на:
Коллекторные также, в зависимости от типа возбуждения, бывают нескольких видов:
- С возбуждением постоянными магнитами.
- С параллельным соединением обмоток соединения и якоря.
- С последовательным соединением якоря и обмоток.
- Со смешанным их соединением.
Электродвигатель постоянного тока в разрезе. Коллектор со щетками – справа
Видео:Синхронный электродвигательСкачать
Какие электродвигатели входят в группу «электродвигатели постоянного тока»
Как уже говорилось, электродвигатели постоянного тока составляют группу, в которую входят коллекторные электродвигатели и бесколлекторные, которые выполнены в виде замкнутой системы, включающей датчик положения ротора, систему управления и силовой полупроводниковый преобразователь. Принцип работы бесколлекторных электродвигателей аналогичен принципу работы двигателей асинхронных. Устанавливают их в бытовых прибора, например, вентиляторах.
Видео:Схема двигателя постоянного тока. Устройство и принцип работы.Скачать
Что собой представляет коллекторный электродвигатель
Длина электродвигателя постоянного тока зависит от класса. Например, если речь идет о двигателе 400 класса, то его длина составит 40 мм. Отличием коллекторных электродвигателей от бесколлектрных собратьев является простота в изготовлении и эксплуатации, следовательно, и стоимость его будет более низкой. Их особенность — наличие щеточно-коллекторного узла, при помощи которого осуществляется соединение цепи ротора с расположенными в неподвижной части мотора цепями. Состоит он из расположенных на роторе контактов – коллектора и прижатых к нему щеток, расположенных вне ротора.
Используют эти электродвигатели в радиоуправляемых игрушках: подав на контакты такого двигателя напряжение от источника постоянного тока (той же батарейки), вал приводится в движение. А, чтобы изменить его направление вращения, достаточно изменить полярность, подаваемого напряжения питания. Небольшой вес и размеры, низкая цена и возможность восстановления щеточно-коллекторного механизма делают эти электродвигатели наиболее используемыми в бюджетных моделях, несмотря на то, что он значительно уступает по надежности бесколлекторному, поскольку не исключено искрение, т.е. чрезмерный нагрев подвижных контактов и их быстрый износ при попадании пыли, грязи или влаги.
На коллекторный электродвигатель нанесена, как правило, маркировка, указывающая на число оборотов: чем оно меньше, тем скорость вращения вала больше. Она, к слову, очень плавно регулируется. Но, существуют и двигатели этого типа высокооборотистые, не уступающие бесколлекторным.
Видео:Синхронный двигатель. Устройство, принцип работы, подключение, применениеСкачать
Преимущества и недостатки бесколлекторных электродвигателей
В отличие от описанных, у этих электродвигателей подвижной частью является статор с постоянным магнитом (корпус), а ротор с трехфазной обмоткой – неподвижен.
К недостаткам этих двигателей постоянного тока отнести можно менее плавную регулировку скорости вращения вала, но зато они способны за доли секунды набрать максимальные обороты.
Бесколлекторный электродвигатель помещен в закрытый корпус, поэтому он более надежен при неблагоприятных условиях эксплуатации, т.е. ему не страшны пыль и влага. К тому же, его надежность возрастает благодаря отсутствию щеток, как и скорость, с которой вращается вал. При этом, по конструкции мотор более сложен, следовательно, не может быть дешевым. Стоимость его в сравнении с коллекторным, выше в два раза.
Таким образом, коллекторный электродвигатель, работающий на переменном и на постоянном токе, является универсальным, надежным, но более дорогим. Он и легче, и меньше по размерам двигателя переменного тока той же мощности.
Поскольку электродвигатели переменного тока, питающиеся от 50 Гц (питание промышленной сети) не позволяют получать высокие частоты (выше 3000 об/мин), при такой необходимости, используют коллекторный двигатель.
Между тем, его ресурс ниже, чем у асинхронных электродвигателей переменного тока, который зависит от состояния подшипников и изоляции обмоток.
Видео:Как работает двухфазный ЭЛЕКТРОДВИГАТЕЛЬ? Бесколлекторные VS коллекторные моторы!Скачать
Как работает синхронный электродвигатель
Синхронные машины применяют часто в качестве генераторов. Он синхронно работают с частотой сети, поэтому он с датчиком положения инвертора и ротора, является электронным аналогом коллекторного электродвигателя постоянного тока.
Строение синхронного электродвигателя
Свойства
Эти двигатели не являются механизмами самозапускающимися, а требуют внешнего воздействия для того, чтобы набрать скорость. Применение они нашли в компрессорах, насосах, прокатных станках и подобном оборудовании, рабочая скорость которого не превышает отметки пятьсот оборотов в минуту, но требуется увеличение мощности. Они достаточно большие по габаритам, имеют «приличный» вес и высокую цену.
Запустить синхронный электродвигатель можно несколькими способами:
- Используя внешний источник тока.
- Пуск асинхронный.
В первом случае, с помощью мотора вспомогательного, в качестве которого выступать может электродвигатель постоянного тока или индукционный трехфазный мотор. Изначально ток постоянный на мотор не подается. Он начинает вращаться, достигая близкой к синхронной скорости. В этот момент подается постоянный ток. После замыкания магнитного поля, разрывается связь с вспомогательным двигателем.
Во втором варианте необходима установка в полюсные наконечники ротора дополнительной короткозамкнутой обмотки, пересекая которую магнитное вращающееся поле индуцирует токи в ней. Они, взаимодействуя с полем статора, вращают ротор. Пока он не достигнет синхронной скорости. С этого момента крутящий момент и ЭДС уменьшаются, магнитное поле замыкается, сводя к нулю крутящий момент.
Читайте также: Кабель для мотор колеса 9 pin
Эти электродвигатели менее чувствительны, чем асинхронные, к колебаниям напряжения, отличаются высокой перегрузочной способностью, сохраняют неизменной скорость при любых нагрузках на валу.
Видео:Синхронные машины переменного токаСкачать
Однофазный электродвигатель: устройство и принцип работы
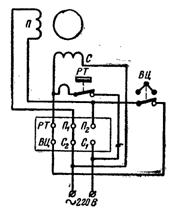
Использующий после пуска только одну обмотку статора (фазу) и не нуждающийся в частном преобразователе электродвигатель, работающий от электросети однофазного переменного тока, является асинхронным или однофазовым.
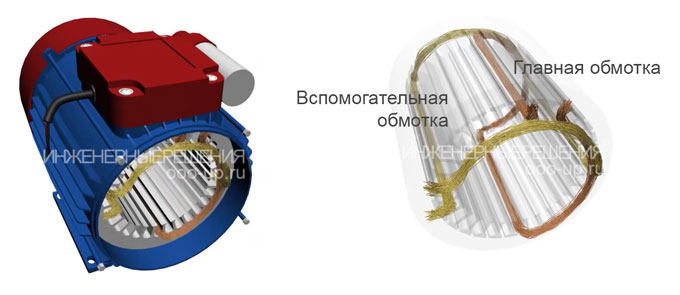
Однофазовый электродвигатель имеет вращающуюся часть – ротор и неподвижную – статор, который и создает магнитное поле, необходимое для вращения ротора.
Из двух, расположенных в сердечнике статора друг к другу под углом 90 градусов обмоток, рабочая занимает 2/3 пазов. Другая обмотка, на долю которой приходится 1/3 пазов, называется пусковой (вспомогательной).
Ротор – это тоже короткозамкнутая обмотка. Его стержни из алюминия или меди замкнуты с торцов кольцом, а пространство между ними залито алюминиевым сплавом. Может быть выполнен ротор в виде полого ферромагнитного или немагнитного цилиндра.
Однофазный электродвигатель, мощность которого может быть от десятков ватт до десятка киловатт, применяются в бытовых приборах, устанавливаются в деревообрабатывающих станках, на транспортерах, в компрессорах и насосах. Преимущество их – возможность использования в помещениях, где нет трехфазной сети. По конструкции они не сильно отличаются от электродвигателей асинхронных трехфазного тока.
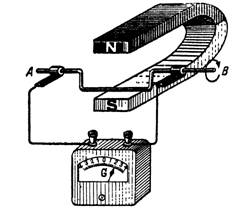
Для того чтобы понять принцип работы электродвигателя переменного тока, поместим изогнутый проводник в равномерном магнитном поле, создаваемом полюсами магнита.
Разница между генераторами переменного и постоянного тока заключается в отсутствии коллектора.
Асинхронные трехфазные электродвигатели являются прямыми энергетическими потребителями трехфазного тока. Такие модели применяются во многих отраслях производства.
На рисунке 2 изображена схема электродвигателя переменного тока. Синхронный генератор имеет такой же статор рис. 1. Питание обмотки статора переменным током происходит от трехфазной сети.
Изменение тока в фазах будет происходить также в фазах генератора. На рис. 2 ротор представлен как цилиндр с пазами, который установлен на медные либо алюминиевые стержни, связанные между собой кольцами на поверхностях ротора с торца.
Ток проходит в замкнутых проводниках. Вращение ротора асинхронного устройства различно от частоты магнитного поля.
Рис. 1 Принцип работы генератора переменного тока.
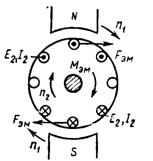
При одинаковом вращении проводники роторной обмотки перестают пересекать магнитное поле, и тогда исчезает вращающий момент. Потому электродвигатель переменного тока и получил название асинхронного (т.е. несинхронного). Круговое вращающее магнитное поле условно представляют полем полюсов постоянных магнитов, которые вращаются с частотой . Помещая в поле статора асинхронного трехфазного прибора ротор, у которого короткозамкнута обмотка (рис. 3), вращающееся поле статора проходит через проводники обмотки ротора и направляет них э.д.с . Направление э.д.с обусловливаться правилом правой руки. Когда обмотка ротора замкнута, то в ее проводниках появляются токи . Ток любого проводника ротора, взаимодействуя с полем статора, формирует электромагнитную силу , течение которой обусловливается правилом левой руки.
Группа электромагнитных сил формирует электромагнитный момент , который приводит ротор в обращение с частотой в направлении поля вращения. Электрическая энергия, которая поступает в обмотку статора из сети, реорганизуется в механическую энергию верчения ротора.
Рис. 2 Трехфазный асинхронный двигатель
Рис. 3 Схема однофазного электродвигателя
Частота верчения электродвигателя переменного тока всегда меньше частоты верчения поля статора , от чего и его название — асинхронный. Когда ротор АД вращается с частотой , тогда проводники обмотки ротора не пересекают поле статора. Следовательно, в них не наводятся э.д.с, не возникают токи, не создается вращающий момент.
Отличие между частотами вращения ротора и поля статора имеет название частота скольжения . На практике чаще используется понятие скольжения — отношение частоты вращения поля статора к частоте скольжения:
Между частотой вращения ротора и скольжением также имеется связь:
Когда работает АД, частота вращения ротора изменяется от при пуске двигателя до на идеальном холостом ходу. Следовательно, двигательному режиму работы асинхронной машины отвечает широта изменений скольжения от 1 до 0. Частота верчения ротора, а следовательно и скольжение находятся в зависимости от нагрузки на валу (внешнего момента сопротивления ). При увеличении нагрузки уменьшается частота вращения ротора, а скольжение возрастает. В асинхронных приборах общего применения начальное скольжение составляет , т.е. при начальной нагрузке ротор АД крутится с частотой, которая близка к частоте вращения поля. Частота э.д.с и токов, наводимых в проводах ротора, определяется частотой скольжения. Учитывая, что определим .
Постоянное переключение батареи равносильно питанию оборудования переменным током. Разница лишь в том, что у такого переменного тока низкая частота, так как за секунду можно 3-5 раз перевернуть батарейку, а у переменного тока направление изменяется 100 раз в секунду.
Если от понижающего трансформатора присоединить два проводника к зажимам прибора с одинаковым с батареей напряжением, то устройство электродвигателя переменного тока будет работать. Однако якорь его будет крутиться несколько медленнее, чем, если бы было питание постоянным током. При переменном токе появляется индуктивное сопротивление обмоток электродвигателя. Прикоснувшись рукой спустя 10-15 мин к его корпусу, можно заметить, что он нагрелся.
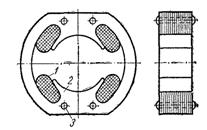
А при работе от батареи этого не происходит. При питании переменным током в стенках корпуса и в полюсах появляются потери от перемагничивания переменным потоком и вихревых токов. Для снижения этих потерь, корпус и полюсы однофазной коллекторной модели переменного тока собираются из штампованных листов электротехнической стали, которые изолированы пленкой лака один от другого и скреплены заклепками (рис. 4).
Рис. 4 Статор коллекторного электродвигателя
1 — Катушка; 2 — наконечник полюса; 3 — заклепка.
Коллекторные электродвигатели переменного тока работают только с последовательным возбуждением, и благодаря катушке параллельного возбуждения имели бы огромное индуктивное сопротивление при переменном токе.
Механические качества однофазного устройства подобны качествам двигателя постоянного тока с последовательным возбуждением. Вследствие этого они применяются тогда, когда от прибора требуется большая пусковая и высокая перегрузочная способность.
Применение коллекторных электродвигателей рассчитано на любую частоту вращения, тогда как у асинхронных, питающихся переменным током частотой 50 Гц, имеется максимальная синхронная частота вращения 3000 об/мин. Этот признак делает незаменимыми коллекторные модели для бытовых приборов, в частности для пылесосов. Коллекторные устройства легче асинхронных однофазовых в 2-3 раза.
Такие электродвигатели изготавливаются для низкого напряжения и питаются они от понижающего трансформатора и для напряжения сети 127 или 220 В. Для снижения опасности поражения электрическим током эти приборы используют в движущихся игрушках (электрические железные дороги, подъемные краны).
Электрические двигатели, питаемые от сети переменного тока, используются в пылесосах, швейных машинках, электробритвах и других электробытовых приборах.
Посредством электродвигателя электрическая энергия преобразуется в механическую. Мощность, количество оборотов в минуту, напряжение и тип питания являются основными показателями электродвигателей. Также, большое значение имеют массогабаритные и энергетические показатели.
Электродвигатели обладают большими преимуществами. Так, по сравнению с тепловыми двигателями сопоставимой мощности, по размеру электрические двигатели намного компактнее. Они прекрасно подходят для установки на небольших площадках, например в оборудовании трамваев, электровозов и на станках различного назначения.
При их использовании не выделяется пар и продукты распада, что обеспечивает экологическую чистоту. Электродвигатели делятся на двигатели постоянного и переменного тока, шаговые электродвигатели, серводвигатели и линейные.
Электродвигатели переменного тока, в свою очередь, подразделяются на синхронные и асинхронные.
🌟 Видео
Синхронные машины переменного тока - Реакция якоря"Скачать
Как определить мощность, частоту вращения, двигателя без бирки или шильдика самому и простоСкачать
АСИНХРОННЫЙ двигатель, принцип работы и строение, простыми словами. (ТРЕХФАЗНЫЙ).Скачать
Как переделать асинхронный двигатель в BLDC моторСкачать
SynRM (Синхронный реактивный ЭДВ) - "новый" гигант в мире электродвигателейСкачать
- Коллекторные двигатели постоянного тока. Разновидности: