
Описано несложное устройство, позволяющее регулировать частоту вращения вала двигателя постоянного тока и поддерживать её установленное значение при изменении механической нагрузки на вал.
При разработке физического прибора потребовалось изготовить низкоскоростной привод вращения платформы, несущей различные датчики и другое оборудование. Необходимы были возможность оперативной регулировки частоты вращения и её стабилизация при изменении механической нагрузки.
Первый вариант привода состоял из малогабаритного электродвигателя постоянного тока серии ДПМ с редуктором из однозаходного стального червяка и текстолитового зубчатого колеса. Датчиком частоты вращения служил насаженный на вал двигателя диск с прорезями, входившими в зазор открытой оптопары.
Сигнал оптопары поступал на узел стабилизации, состоящий из генератора образцовой частоты, частотного дискриминатора и прочих необходимых элементов. Устройство отлично «держало» назначенную частоту вращения, не реагируя на внешние возмущения.
Но выявился крупный недостаток, о котором разработчики и не догадывались в начале работы. Привод сильно шумел. Шум шариковых подшипников двигателя, червячной пары передавался на закреплённые на платформе датчики и почти полностью «убивал» полезные сигналы. Попытки амортизировать привод не привели к успеху, так как при изменении момента сопротивления платформы вращению механизм раскачивался и равномерность вращения терялась.
Выход был найден в использовании привода программирующих колёс от видеомагнитофона (рис. 1). Вал установленного в нём двигателя вращается в подшипниках скольжения, а червячная пара выполнена из материала, подобного капролону. Передаточное число механизма — 123, работает он практически бесшумно.

Поскольку установить диск с прорезями в этом механизме оказалось очень сложно, пришлось изыскивать иной способ стабилизации частоты вращения. Была сделана попытка использовать узел стабилизатора частоты вращения двигателя от кассетного магнитофона. Однако этот узел хорошо стабилизировал только одно значение этой частоты. При попытке установить иное стабильность нарушалась. После долгого и бесполезного поиска приемлемого решения в литературе пришлось разрабатывать узел стабилизации самостоятельно.
Как известно, напряжение на выводах якоря двигателя постоянного тока складывается из падения напряжения на активном сопротивлении обмоток якоря и противоЭДС, прямо пропорциональной частоте вращения якоря. Эта ЭДС может служить мерилом частоты вращения. Но для этого нужно отделить её от падения напряжения на омическом сопротивлении обмотки.
Описанные в [1, 2] устройства, использующие противо ЭДС для стабилизации или регулирования частоты вращения двигателя либо хорошо поддерживают только одно установленное значение, либо, допуская регулировку частоты в широких пределах, не стабилизируют её при изменении нагрузки. Разработанное устройство отличается сочетанием обоих факторов — сохраняет произвольно установленную частоту вращения при изменении момента нагрузки.
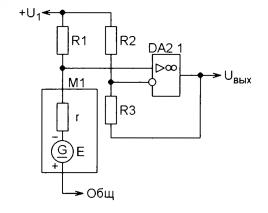
Поставленная задача решается достаточно просто. В разработанном устройстве, схема которого изображена на рис. 2, последовательно с якорем двигателя М1 включён резистор R1, сопротивление которого в точности равно активному сопротивлению якоря. Если из напряжения на якоре вычесть падение напряжения на этом резисторе, получим напряжение, пропорциональное частоте вращения якоря. Операцию вычитания выполняет узел на ОУ DА2.1. Это напряжение поступает на один из входов усилителя сигнала рассогласования на ОУ DА2.2, на другой вход которого подано образцовое напряжение, соответствующее желаемой частоте вращения. ОУ управляет транзистором VT1, регулирующим напряжение питания двигателя М1.

Для лучшего понимания процесса регулирования рассмотрим упрощённую схему устройства, изображённую на рис. 3. Из неё понятно, что активное сопротивление якоря г и резисторы R1—RЗ образуют измерительный мост, в диагональ которого включены входы ОУ DА2.1. Напряжение на выходе моста равно
 При точном выполнении равенства
При точном выполнении равенства мост сбалансирован относительно напряжения питания двигателя U1 благодаря чему напряжение Uвых зависит только от противоЭДС якоря Е, т. е. от частоты его вращения. Изменение питающего напряжения U1 не разбалансирует мост, но вызывет изменение тока через двигатель, что приводит к изменению частоты его вращения и, соответственно, противоЭДС.
мост сбалансирован относительно напряжения питания двигателя U1 благодаря чему напряжение Uвых зависит только от противоЭДС якоря Е, т. е. от частоты его вращения. Изменение питающего напряжения U1 не разбалансирует мост, но вызывет изменение тока через двигатель, что приводит к изменению частоты его вращения и, соответственно, противоЭДС.
Резистор R1 должен быть рассчитан на рассеивание мощности, равной максимальной мощности двигателя.
Необходимую частоту вращения устанавливают подстроенным резистором R5. Увеличение или уменьшение частоты вращения под нагрузкой свидетельствует о неточной балансировке моста. Её нужно добиться подборкой резисторов R1— R3.
Конденсатор С1 и резистор R6 предотвращают высокочастотную генерацию.
Транзистор VT1 и интегральный стабилизатор напряжения 7812 размещены на небольшом теплоотводе. Теоретически устройство нечувствительно к колебаниям напряжения питания, но напряжение на подстроенном резисторе R5, задающем частоту вращения, должно быть стабилизировано. По этой причине в устройстве применён интегральный стабилизатор напряжения DА1. Кроме того, встроенная в этот стабилизатор защита по току предохраняет двигатель и транзистор VТ1 от повреждения при случайном заклинивании механизма.
При испытаниях устройства выяснилось, что основное влияние на стабильность частоты вращения оказывают температурные изменения сопротивления обмотки двигателя, выполненной из медного провода, тогда как резистор R1 изготовлен из манганина. Вводить различного рода термокомпенсирующие цепи было сочтено излишним, так как обеспечить равенство температуры резистора и обмотки двигателя не представляется возможным из-за разных условий отвода от них тепла.
И наконец, испытания готового устройства неожиданно выявили, что частота вращения приборной платформы под нагрузкой падает на 5…10 %. Оказалось, что виновато проскальзывание двух резиновых пассиков, соединяющих вал двигателя с червячным редуктором. Тщательной промывкой шкивов и пассиков, промывкой и смазкой всех подшипников скольжения указанный недостаток был устранён.
Читайте также: Холодильник атлант 6023 031 мощность компрессора мощность
В результате достигнут коэффициент стабильности лучше 0,5 % при изменении нагрузки на выходном валу редуктора в пределах от 0 до 20 Н·см, что вполне удовлетворило предъявляемым требованиям.
Несомненное достоинство предложенного решения — его простота по сравнению с устройствами аналогичной точности. Недостаток — почти двукратный перерасход мощности, рассеиваемой на дополнительном резисторе.
- Шевченко В. И. и др. Кассетные магнитофоны (библиотека «Телевизионный и радиоприём. Звукотехника», вып. 90). — М.: Связь, 1977.
- Леоненко П. Стабилизатор частоты вращения. — Радио, 1988, № 7, с. 32.
Автор: В. ХИЦЕНКО, Т. ЯКОВЛЕВ, г. Санкт-Петербург
Источник: Радио №4, 2015
Видео:Регулятор частоты вращения часть 1.Скачать

Система стабилизации частоты вращения вала
Название работы: Стабилизация частоты вращения вала паровой турбины с помощью мехатронных систем
Предметная область: Коммуникация, связь, радиоэлектроника и цифровые приборы
Описание: Паровая турбина В данном курсовом проекте рассматривается тема стабилизация частоты вращения вала паровой турбины с помощью мехатронных систем.1Схема привода стабилизации частоты вращения вала паровой турбины с помощью баипаса. В сравнении с газовыми турбинами системы управления паровых турбин должны сохранять управляемость во всем диапазоне тепловой мощности турбины.Типовая схема паровой турбинной группы Пар от источника проходит к ступени высокого давления паровой турбины через два главных паровых регулирующих клапана поз.
Рисунок.1 . Паровая турбина
В данном курсовом проекте рассматривается тема стабилизация частоты вращения вала паровой турбины с помощью мехатронных систем. Современный этап развития паротрубостроения характеризуется увеличением агрегатных мощностей, повышением начальных параметров пара и т.д.
В практическом освоении высоких начальных параметров пара одной из основных проблем, является наличие относительно дешевых материалов для деталей, работающих при высоких температурах и давлении, что определяется уровнем развития металлургии в области жаропрочных сталей и их сплавов.
Мехатроника это новая область науки и техники, посвященная созданию и эксплуатации машин и систем с компьютерным управлением движением, которая базируется на знаниях в области механики, электроники и микропроцессорной техники, информатики и компьютерного управления движением машин и агрегатов».Мехатроника является научно-технической дисциплиной, которая изучает построение электромеханических систем нового поколения, обладающих принципиально новыми качествами и, часто, рекордными параметрами. При этом система в истинно мехатронном подходе. Мехатронный подход заключается в концепции мехатроники и принципах построения и организации мехатронных систем.
Некоторые исследователи видят главную суть мехатроники в объединении, прежде всего, механики и электроники, в отличие от электромеханики, появившейся в свое время на стыке механики и электротехники. Цель в Мехатронике — достижение наибольшей экономической, технической эффективности и конкурентоспособности создаваемых мехатронных устройств и систем.»Мехатронный модуль — это функционально и конструктивно самостоятельное изделие для реализации движений с взаимопроникновением и синергетической аппаратно-программной интеграцией составляющих его элементов, имеющих различную физическую природу».К элементам различной физической природы относят механические, электротехнические, электронные, цифровые, пневматические, гидравлические, информационные и т.д. компоненты.»Мехатронная система совокупность нескольких мехатронных модулей и узлов, синергетически связанных между собой, для выполнения конкретной функциональной задачи».
1. Анализ вариантов схемных решений
1.1. Выбор и обоснование схемы привода стабилизации частоты вращения вала паровой турбиной
1.1.1Схема привода стабилизации частоты вращения вала паровой турбины с помощью баипаса.
В сравнении с газовыми турбинами, системы управления паровых турбин должны сохранять
управляемость во всем диапазоне тепловой мощности турбины. Управление газовой турбиной происходит за счет изменения количества топлива, подаваемого в камеру сгорания газотурбинного двигателя (подобно насосу-инжектору в дизельном двигателе); в паровой турбине клапаны управления регулируют весь поток пара, подава-емого на турбину. Номинальные размеры паровых клапанов, величины давления и температуры пара, воздействию которых подвергаются компоненты гидравлического оборудования, значительно выше, чем у газовых турбин. В результате управляющие усилия должны быть намного выше, поэтому габариты и нагрузки пружин гидроприводов увеличиваются. Типовая схема паровой турбинной группы в комплекте с необходимыми паровыми клапанами показана на рис. 2.
Рисунок.2. Типовая схема паровой турбинной группы
Пар от «источника» проходит к ступени высокого давления паровой турбины через два главных паровых регулирующих клапана, поз. 1.1 и поз. 1.2 . После первого цикла расширения, пар поступает на ступень среднего давления паровой турбины, через отсечные клапаны поз. 2.1 и поз. 2.2. После ступени среднего давления пар проходит через ступень низкого давления к конденсатору и далее, в виде конденсата, возвращается в технологический процесс. Для сохранения управляемости частотой вращения технологическо на случай нештатных ситуаций и отказов предусмотрены байпасные линии высокого давления поз. 4 , среднего давления поз. 5 и низкого давления поз.6 .
Использование байпасных линий позволяет направлять подачу пара в обход турбины. Встроенные клапаны управления турбиной разрабатываются и изготавливаются производителем турбины. В зависимости от места установки клапана в системе рабочая температура может достигать 550 °C, а диапазон изменения давления 8-300 бар. Каждый клапанный блок включает
Читайте также: Сколько заливать масла в компрессор для холодильника
в себя отсечной клапан быстрого запирания и регулирующий клапан управления.Функции обеспечения безопасности иуправления предусмотрены для каждого клапанного блока. К корпусу клапана крепятся
два гидропривода (Cм. рис. 3).
Рисунок.3. Корпус клапана с гидроприводом
Независимо от привода все требуемые функции управления объединены в одном клапанном блоке. Оба узла привода напрямую соединены с блоком управления. Закрытие клапана обеспечивается пакетом пружин.
Компания Bosch Rexroth производит комплектные серии гидроприводов и пакетов пружин для различных паровых клапанов. Диапазон диаметров 110-240 мм, а диапазон изменения хода составляет 50-250 мм. Привод представляет собой модульную конструкцию, состоящую из различных функциональных блоков; в стандартный ряд диаметров входят три типоразмера корпусов и три типоразмера пакетов пружин. (Рис. 4).
Рисунок .4.Типоразмеры пакетов пружин
Приводы и пакеты пружин среднего и большего размерных рядов могут быть взаимозаменяемы, что позволяет для этих серий охватить спектр паровых клапанов для турбин мощностью 50-1000 MW. Паровые клапаны удерживаются в открытом положении гидроприводом, преодолевающим усилие пружинного блока, что контролируется сервораспределителем в
замкнутом контуре управления. Каждый клапанный блок включает в себя отсечной клапан быстрого запирания и регулирующий клапан управления.
Отсечка подачи пара может быть реализована приводами управления, которые обладают приоритетной функцией быстрого закрытия. При закрытии клапана (120-200 милли-секунд) поток масла с высоким расходом (2000-3000 л/мин. для больших гидравлических цилиндров) направляется
Видео:Гувернор или механический стабилизаторСкачать

напрямую в противоположную часть цилиндра. Подобно приводам для газовых турбин, во время быстрого закрытия не происходит возврата масла к гидравлической станции. Поэтому подсоединение к питающей гидравлической станции необходимо подбирать только из условия
обеспечения операций регулирования. В конструкции типовой гидравлической станции для управления главными паровыми клапанами предусмотрены резервные насосные группы, водомасляный теплообменник, распределительная аппаратура и фильтры очистки гидравлической жидкости.
1.1.2Система управления частоты вращения турбины построенная на центробежном датчике.
На рисунке5 показана принципиальная схема системы управления скоростью вращения паровой турбины. Эта система состоит из центробежного датчика скорости и гидравлического сервомеханизма «золотник-поршень». Центробежный датчик создает механическое перемещение плунжера золотника, зависящее от скорости вращения турбины Так как на выходе этого датчика сила и перемещение невелики, то чтобы по- лучить мощность, достаточную для управления клапаном регулирующим расход пара к турбине, его нужно усилить с помощью гидравлического сервомеханизма «золотник поршень».
Система управления работает таким образом, что плунжер клапана регулирующего расход пара, всегда занимает положение, обеспечивающее расход, потребный для вращения турбины с заданной скоростью.

Рисунок.5. Система управления частоты вращения турбины построенная на центробежном датчике
1.1.3Система управления частоты вращения турбины построенная на пропорциональной гидравлике с возможностью реверса турбины.
На рисунке 6 представлена система управления частоты вращения турбины построенная на пропорциональной гидравлике с возможностью реверса турбины. С тахогенератора, установленного на валу турбины поступает сигнал на усилитель настроенный на определенный интервал частот вращения вала. После поступления сигнала на усилитель, усилитель подает сигнал на пропорциональные магниты распределителя.

Рисунок.6. Система управления частоты вращения турбины построенная на пропорциональной гидравлике с возможностью реверса турбины
1.1.4Система управления частоты вращения турбины построенная на пропорциональной гидравлике с управлением от усилителя «сопло заслонка».
На рисунке 7 изображена принципиальная схема системы управления вращения паровой турбины. С тахогенератора, установленного на валу паровой турбины, поступает сигнал на усилитель, с усилителя сигнал поступает на пропорциональный магнит который, либо притягивает, либо отталкивает заслонку , с усилителя «сопло-заслонка» сигнал поступает на пропорциональный распределитель. Распределитель управляет гидроцилиндром одностороннего действия на котором закреплена дросселирующая расход заслонка на входе в турбину, тем самым обеспечивается постоянство частоты вращения вала.

Рисунок.7. Система управления частоты вращения турбины построенная на пропорциональной гидравлике с управлением от усилителя «сопло заслонка»
1.1.5Система управления частоты вращения турбины построенная на пропорциональной гидравлике
На рисунке 8 изображена принципиальная схема управления частоты вращения турбины построенная на пропорциональной гидравлике. С потенциометра подается постоянный сигнал, который мы принимаем за заданное значение вращения вала, на компаратор, который сравнивает заданное значение вращения вала с текущим значением от тахометра, установленного на вал турбины. После компаратора сигнал поступает на задатчик, после задатчика сигнал поступает на усилитель, который управляет магнитом пропорционального распределителя, который в свою очередь управляет гидроцилиндром одностороннего действия, на котором закреплена дросселирующая заслонка на входе в паровую турбину, что позволяет регулировать частоту вращения вала. Данное управление принимаем за базовую схему курсового проекта

Рис.8. Система управления частоты вращения турбины построенная на пропорциональной гидравлике
1.1.6 Описание выбранной системы, регулирования частоты вращения вала паровой турбины
На рис. 9 изображена конструктивная блок схема системы, регулирования частоты вращения вала паровой турбины.

Рисунок.9. Конструктивная блок схема системы, стабилизации частоты вращения вала паровой турбины
На компаратор подается два сигнала, заданное значение частоты вращения (подается с персонального компьютера либо с потенциометра) и действительное значение частоты вала паровой турбины, который подается с тахогенератора, который в свою очередь связан с дросселирующей задвижкой на входе в паровую турбину, которая регулируется, в нужном диапазоне, с помощью гидропривода , который управляется в свою очередь пропорциональной гидравликой , которая управляется пропорциональным магнитом, на который подается сигнал через усилитель с компаратора.
Читайте также: Электромагнитная муфта компрессора кондиционера рено сандеро степвей
Таким образом в системе имеется обратная связь, что приводит к улудшению работы системы в целом.
2.Динамический расчет привода системы, стабилизации частоты вращения вала паровой турбины
Видео:326) АВТОМАТИКА Предельный регулятор частоты вращения дизеля ( вопросы Госов и мкк )Скачать

2.1 Математическое представление компонентов системы, стабилизации частоты вращения вала паровой турбины при втягивании штока
В систему с гидроцилиндром с определенными параметрами изображенный на рис.10 подается рабочая жидкость.

Рисунок.10 . Принципиальная схема
Структурная схема рассматриваемой задачи представлена на рисунке

Рисунок.11. Структурная схема
- Питание
- Дроссель не регулируемый
- Гидравлический тройник
- Емкость с переменным объемом
- Гидроцилиндр
- Механический тройник
- Масса
- Пара трения
- Пружина
- Заземление
Математическое описание элементов схемы
= ( E / V 0 + V 52 )* Q 41 = P 41
F 52 =( ( π * D 2 )/4-( π * d 2 )/4)* P 41
Q 33 = υ 52 *( ( π * D 2 )/4-( π * d 2 )/4)

Рисунок.12. Математическая модель схемы

Рисунок.13 . График давления возникающий в полости цилиндра
Крутизна графика давления обуславливается тем, что для того чтобы в полости было постоянно растущее давление , давление в штоковой должно преодолеть сначала силу трения, а также усилие пружины.

Рисунок.14 . График перемещения штока гидроцилиндра
Начальная площадка на графике перемещения обуславливается тем ,что для начала перемещения цилиндр должен преодолеть силу страгивания, а так же
Силу пружины , которая зависит от ее упругости.

Рисунок.15. График расхода в гидроцилиндре
Понижение расхода на графике обуславливается тем, что полость гидроцилиндра не бесконечна.

Рисунок.16. График скорости штока гидроцилиндра
График скорости штока цилиндра, как и должно, быть обратнопропорционален графику расхода.
3. Проектирование гидропривода системы стабилизации частоты вращения вала паровой турбины

Рис17. Конструктивная схема гидроцилиндра
Видео:Cтабилизатор частоты вращения коллекторного двигателя , на полевом транзисторе.Скачать

Для определения диаметра штока произведем расчет на деформацию:
, где Δl = 0,0003 м принятая допустимая деформация штока;
N = 15 кН нагрузка на шток;
Е = 2,2*10 МПа модуль упругости;
l = 0,3 м принятая длина штока;
F = Π*d2/4 площадь поперечного сечения штока.
Отсюда определим диаметр штока:
Принимаем диаметр штока d = 12 мм согласно ГОСТ 6540-68.
Внутренний диаметр цилиндра примем D = 50 мм по ГОСТ 6540-68.
Рассчитаем рабочее давление по формулам:
Принимаем давление равное 4МПа
В качестве материала гильзы гидроцилиндра выбираем Сталь 45
Согласно третей и четвертой теориям прочности:
где S толщина стенки цилиндра; D внутренний диметр цилиндра; σ допустимое напряжение; р — рабочее давление.
3 . 2 . Определение расходов потребляемых цилиндром
Работа гидроцилиндра осуществляется при втягивании штока.
Рабочие площади гидроцилиндра:
Произведем расчет потребной скорости:
4. Выбор аппаратуры гидропривода системы стабилизации частоты вращения вала паровой турбины
Так как в системе требуется быстродействие, то выбор насоса осуществляем по расходу:
Выбираем пластинчатый насос фирмы Ponar wadowice
- Рабочий объем
- Давление на выходе
- Частота вращения вала
- Рабочая подача
4.3. Выбор распределительного клапана
В гидроприводе стабилизации частоты вращения вала паровой турбины используется пропорциональный
4/2 распределитель с электромагнитным управлением.
Выбираем пропорциональный распределитель фирмы Rexroth
Так как в данном приводе используется разные уровни расхода, то необходимо определить уровень управляющего сигнала для каждого из них. Уровень входного сигнала определяется по графику зависимости расхода от входного сигнала . Смотри приложение
Видео:Карданная передача, основы. Карданные шарниры не равных и равных угловых скоростей (ШРУСы)Скачать

В гидравлическом приводе стабилизации частоты вращения вала паровой турбины, используется пропорциональный распределительный клапан, что позволяет производить установку разных расходов, но требует высокого качества рабочей жидкости. Исходя из приведенных выше данных, в качестве рабочей жидкости выбираем минеральное масло ISO ( VG 46) .
В качестве фильтра предварительной очистки, устанавливаемого на всасывающей линии, выбираем фильтр фирмы Rexroth ABZFR — S 0050-10-1 X / M — A визуальным индикатором загрязнения ABZFV — RV 2-1 X / M — A .
На выходе из насоса установим фильтр ABZFD — S 0040-10 420-1 X / M — A .
5. Гидравлический расчет
Задача расчета определение диаметров трубопроводов и потер давления, которые возникают в процессе работы привода.
Рассчет ведется для участков, которые имеют одинаковый расход.
где Q расход на данном участке ,
V средняя скорость жидкости.
Средняя скорость жидкости в трубопроводах принимается:
для напорных при p = 6. 10 МПа — V= 5. 6 м/с.
Определяем диаметры трубопроводов:
Согласно ГОСТу 8732-78 принимаем: d вс = 8мм.
Согласно ГОСТу 8732-78 принимаем: d н = 4 мм.
Согласно ГОСТу 8732-78 принимаем: d зл = 10 мм.
По принятому діаметру расчитаем действительную скорость жидкости в трубопроводе:
Визначимо витрати тиску на тертя з виразу :
— дійсна середня швидкість рідини;
Коефіцієнт тертя залежить від режиму течії рідини і визначається по числу Рейнольдса:
При Re >2300 турбулентний режим
Втрати на місцевих опорах:
де — коефіцієнт місцевого опору
Втрати на гідравлічних апаратах:
Коэффициент трения λ зависит отрежима течения жидкости и определяется числом Рейнольдса:
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала
- Правообладателям
- Политика конфиденциальности
Механика © 2023
Информация, опубликованная на сайте, носит исключительно ознакомительный характер🎥 Видео
Электроника, часть 4. Системы автоматического управленияСкачать

Как микроконтроллер управляет двигателем? Алгоритм. На примере стиральной машины.Скачать
КАК работает ESP ?! ОБЯЗАТЕЛЬНО ЧТОБЫ БЫЛО И У ВАС В АВТОМОБИЛЕ! ВЕСТА vestaСкачать
Ошибки системы ABS: Провод или датчик? "Сканер говорит - датчик" (Видео №59)Скачать
Стабилизация скорости гидрогенератора на базе Danfoss PLUS+1Скачать
Система автоматического регулирования и обратная связьСкачать
Сделай так и ВИБРАЦИИ НА СКОРОСТИ больше не будет!Скачать
Система регулирования турбиныСкачать
Регулирование частоты и мощности. Часть 1. Баланс мощностей. Автоматический регулятор скорости.Скачать
Что такое ШИМ? Как ШИМ регулирует яркость, температуру, обороты двигателя и напряжение? Разбираемся!Скачать
Боремся с BAS ESP, датчик поперечного ускорения мл320Скачать
Регулятор - Стабилизатор оборотов мотора от стиралки. Простая схема стабилизатораСкачать
Реактивная мощность за 5 минут простыми словами. Четкий #энерголикбезСкачать
Загорелась лампочка ABS... Не спешим тратить деньгиСкачать
Как работает полный привод? Дифференциал, и что такое крутящий момент)))Скачать














